
Abstract
New advancements in light-emitting diode (LED) have attracted many to use LEDs in commercial and industrial applications. In the recent years, new family of DC-to-DC converters, namely super-lift Luo converters, has evolved in the power electronics terrain which have high gain than the conventional boost converter. In this paper, AC–DC converter with super-lift Luo converter as PFC topology for high-brightness light-emitting diode applications is proposed. When subjected to load and line variations, power quality parameters of PFC AC–DC converter will have a change. The indices continue to change till the output voltage gets stabilized. For fast regulation under transient conditions, particle swarm optimization tuned proportional–integral (PI) controller is used. MATLAB/Simulink environment is used to carry out extensive simulation on the work proposed. The laboratory model is constructed and tested to verify simulation results. Total harmonic distortion at the input side of an AC–DC converter is validated as per the standards of IEC 61000-3-2 of class c equipment’s.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
During earlier days, people were using incandescent lighting in household and commercial applications. As a result of poor lumen per watt, short life time and higher operating cost, people started moving toward fluorescent lighting. Fluorescent lamp needs high voltage at starting which leads to the use of electronic or magnetic ballast with the circuit. Electronic ballast uses solid-state technology, and magnetic ballast is type of coil wound on the single core. The nonlinear behavior of the ballast will cause electromagnetic interference (EMI) (Dutta and Ang 2016) problems on the system. Flickering is the main problem with fluorescent lamp.
Nowadays, high-brightness light-emitting diode (HBLED) lighting is used in street lighting, industrial lighting and decorative lighting, etc. HBLEDs have many advantages like high lumens, extremely longer life, extremely compact (no glasses or filaments), composed of many LEDs, easily dimmable by lowering the current, no UV radiation, etc. (El-Moniema et al. 2013, 2014; Shrivastava and Singh 2013; Xu et al. 2018).
IEC 61000-3-2 standards of class “C” are meant for lighting applications. In order to meet out the IEC 61000-3-2 standards, AC–DC converter for LED lighting applications needs to be designed with improved power quality issues like higher power factor(PF), lower THD, etc. This power quality improvement reduces loses, transfers power effectively to the load from the source and improves efficiency. The conventional diode bridge-based rectifier with the capacitor at the load side has poor power quality such as low PF and high THD. So, power factor corrector stage needs to be added between load and diode bridge rectifier. It can be of two-stage (Wen et al. 2014; Piaoa et al. 2012) or single-stage converter. For high-power application, two-stage circuit is used. For low-power lighting applications, single-stage PFC circuit is used because of its simple structure, less component count and high efficiency. Various PFC topologies such as buck, boost, cuk, buck-boost, SEPIC and zeta converters are studied in the literature (Lin and Wang 2018; Durga Devi and Uma Maheswari 2017; Yang et al. 2015; Patral et al. 2017; Jha and Singh 2016). Continuous conduction mode (Han et al. 2016; Miao et al. 2016)-operated boost topology (Bouafassa et al. 2015; Babu et al. 2018; Leon-Masich et al. 2016; Kim et al. 2018) power factor corrector circuit is extensively used due to less filtering requirements, larger gain and easy program of input current. Efficiency of the converter will be improved when it is operated in continuous conduction mode. Due to the limitation of diodes and switches, much higher gain cannot be obtained. In the past two decades, new topologies with the concept of voltage lifting technique (Luo and Ye 2004) have been developed. Voltage at the output side of these topologies rises in step along with geometric and arithmetic progression. In boost and super-lift Luo converters, inductor at the input side is connected with the source during ON and OFF states of the switch. Due to this feature, these converters are used in PFC AC–DC converter. Super-lift converter-embedded AC–DC converter needs more filtering requirement than basic boost-type converter-embedded AC–DC converter. But, super-lift-type Luo converters have higher gain than the boost converter for the same duty ratio. In the proposed work, positive-output super-lift elementary-type (Premalathab 2017; Nath and Pradeep 2016; Tekade et al. 2016) Luo converter (POESLLC) is used between DBR and LED load.
Steady-state performance indices like power factor, total harmonic distortion can be improved by making the input current sinusoidal. Similarly, it is important to keep the voltage at the load side constant under input-side and load-side variations. These can be achieved by tuning proportional–integral controller used in the voltage error loop. For tuning PI controllers, soft computational techniques such as particle swarm optimization (PSO), ant colony optimization and evolutionary method like genetic algorithm were reported in the literature (Ramirez et al. 2018; Meena and Devanshu 2017; Jasdeep and Sheela 2014). Analytical methods for tuning proportional–integral controller are reported in Astrom and Tagglund (1995), Ribeiro et al. (2017). PSO tuning is chosen due to its fast convergence rate to arrive at solution with easier steps.
POESLL converter is a third-order-type converter, and transfer function is required for controller design. Several methods such as average PWM switch modeling approach, switching flow graphical method and state space average(SSA) method are reported in Kumar and Jeevannantham (2013), Alongea et al. (2017), Mokal and Vadirajacharya (2017) and Yang et al. (2016). Due to its ease of use, SSA is used in this paper. Equivalent series resistance (ESR) of passive energy storage elements is included. After including ESRs of inductor and capacitor, complexity of finding the resolvent matrix is increased. So, Leverrier algorithm (Garg et al. 2015) is used to find the resolvent matrix of the system.
For power factor correction, there are two schemes available, namely active and passive schemes. The effect of harmonics at the input current is lesser in active schemes than passive schemes. In this paper, average current mode control (ACM) scheme is used for making the input current sinusoidal. Implementation of ACM is easy.

PFC AC–DC Luo converter-based LED Driver
In this paper, PFC in AC–DC Luo converter for HBLED applications with PSO-PI controller for fast regulation under transient conditions is proposed. Modes of operation and steady-state analysis are given in Sect. 2. Dynamic model of the converter is given in Sect. 3. PSO tuning is given in Sect. 4. Simulation and results are given in Sect. 5. FPGA implementation is given in Sect. 6. The paper is concluded in Sect. 7.

Power circuit of POESLL converter. a Topology, b equivalent circuit when the switch is ON, c equivalent circuit when the switch is OFF
2 Modes of operation and analysis
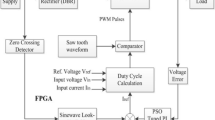
Figure 1 shows power factor correction scheme in which DC–DC POESLLC is used as PFC topology. The input current to the Luo converter is compared at every switching period (\(f_\mathrm{sw}\)) with the reference current. The reference current is given by (1)
The reference current is obtained from the voltage loop. At the output side of the converter, the actual voltage is sensed and is correlated with the voltage to be maintained constant at the load side of the converter. The voltage error obtained is given to the PSO-PI controller to produce enough gain for the fast regulation under transient conditions. The amplitude and duration of the pulsating current are controlled to make the input current to be in phase with the input voltage. This will make the power factor at the input side almost unity, and also it improves total harmonic distortion. To aid the analysis of the PFC AC–DC Luo converter, the following assumptions (Shen and Ko 2014) are made:
-
The switching frequency \((f_\mathrm{sw})\) is much higher than the line frequency (\(f_\mathrm{line}\)).
-
At starting, HBLED is considered as an open circuit. After the LEDs become ON, voltage across the LED will be constant and current is increasing while we increase the voltage. So, HBLED is considered as pure resistor during steady-state operation.
-
All components are ideal.
-
Output-side energy storage capacitor is large enough to deliver a smooth DC link voltage for the HBLED.
The Luo topology (POESLLC) used in PFC implementation and equivalent circuits of POESLLC when the switch is ON or OFF are shown in Fig. 2. When the switch is ON, energy is stored in the inductor and capacitor. During this period (\(0<t<kT\)), large output capacitor supplies HBLED load. When the switch is OFF (\(kT<t<T\)), input voltage \(V_\mathrm{in}\) along with the energy stored in the inductor and capacitor supplies the HBLED load. In this system, POESLLC is assumed as operating in a continuous conduction mode (CCM). The inductor current will never reach zero during switching except in the zero-crossing region. Inductor current over one switching period is shown in Fig. 3. Parameters used for designing a converter are listed in Table 1.

Inductor current over one switching cycle
3 Dynamic model of Luo converter
SSA technique is used to determine the transfer function of the positive-output Luo-type converter. Input inductor current \((i_{L})\) and voltage across capacitors \((v_{1}, v_{2})\) are taken as the state variables. State equations during switch on (\(0<t<kT\)) is of the form (2)
Various state equations depicting the dynamic behavior during the switch ON (\(0<t<kT\)) mode are as follows. Inductor current:
For capacitor voltages,
Output voltage of the converter is written as (6)
Dynamics of the converter during switch OFF (\(kT<t<T\)) mode can be written as (7)
Capacitor dynamics during the period (\(kT<t<T\)) can be written as (8) and (9)
From Eq. (8)
From Eq. (9)
Inductor current dynamics can be written as (12)
After solving Eq. (12) for \(\dot{ i(L) }\), we get
Output voltage during this period is written as (14)
Time averaging is used to derive the averaged state space, which can be written as (15) and (16)
Equations (15) and (16) are nonlinear in nature which can be linearized by adding small AC perturbations around a steady-state point.
Here,
Equation for the transfer function of the converter is given as follows (17):
The resolvent matrix (of higher order system) can be calculated in a simple way with the help of Leverrier’s algorithm, whereas tough calculations are there with the other existing methods.
Resolvent matrix of a third-order system can be written as (18)
where
Finally, transfer function of the converter is arrived as (19)
The voltage control loop employing proportional–integral controller is shown in Fig. 4.

Voltage control loop of POESLL converter
4 Proportional–integral controller tuning using PSO
The objective function is to minimize the integral absolute error (IAE) and integral square error (ISE) which are given by Eq. (20)
In 1995, Eberhart and Kennedy proposed a particle swarm optimization (PSO) algorithm. PSO algorithm (Marini and Walczak 2019; Du and Swamy 2016; Tayebi et al. 2015; Kaveh 2014; Vincent and Nersisson 2017) was derived from the concept of swarm intelligence, and PSO algorithm is an approximate solution.
The swarm consists of a number of particles, and size of the swarm depends on the number of tunable parameters. The swarm is initialized randomly. Position of the particles is adjusted based on its own experience and neighboring particles experience. Whole search space is used for minimizing the cost function. A variety of cost functions can be defined based on our requirement. In this work, PSO algorithm is used for tuning the parameters of the PI controller. If the system model is created more precisely, the controller can be tuned more accurately.
PSO algorithm relies on the information that gets shared between particles. \(P_\mathrm{best}\) or particle best is obtained from each particles individual best performance. \(G_\mathrm{best}\) or global best is obtained from the previous iteration of other particles on the best performance. A function ( fitness function) is used to study the performance of swarm from that we can identify whether it has attained the best solution or not. As swarming progresses, particles position stagnates. The velocity and positions of the particles are updated using Eqs. (21) and (22).

Flowchart of the PSO tuning of PI controller
After the number of iterations or runs are finished, PSO algorithm as shown in Fig. 5 will give the best possible parameter values which gives the lowest value for objective function or cost function.
where \(P_\mathrm{best}\) depicts the best earlier position of the ith particle, \(G_\mathrm{best}\) represents the neighbors best position, \(v_{ij} (n)\) represents the velocity, present(n) represents the current particle (solution), rand() is number between (0,1), “w” represents the inertia weight, and \(c_{1}\) and \(c_{2}\) represent the acceleration constants. Table 2 shows the various parameters used to tune PI controller using PSO algorithm.

Response under steady-state condition: a output voltage, b THD for full load, c output voltage ripple for full load

Input voltage and input current for two different loads a for 25-W load, b for 100-W load

Performance (output voltage, input current and input voltage) under line variations: a positive step change in input voltage (36–42 V), b negative step change in input voltage (36–30 V)

Performance (output voltage, input current and input voltage) under load variations. a Load is reduced from 100 to 75 W, b load is increased from 75 to 100 W
The values of proportional–integral controller constants were found to be \(K_{p}=0.749\) and \(K_{i}=48.7\)
5 Simulation results
The objective of this area is to examine the simulation results of PFC switched-mode AC–DC converter. The Simulink model of the proposed PFC AC–DC converter with POESLL converter and PSO-PI controller is designed to validate the performance of this system under steady and transient state conditions. HBLED load is considered as a pure resistor (at starting, open circuit). The extensive simulation has been done in MATLAB/Simulink environment.
5.1 Steady-state conditions
Figure 6 shows the instantaneous output voltage, total harmonic distortion and output voltage ripple for the full load . It is evident from the results that voltage ripple is 0.79 V and THD of input current at full load condition is below 5%. The input current is sinusoidal.
Figure 7 shows the input-side voltage and current for various loads. Here, the current at the input side is in phase with the voltage and power factor for all the load conditions (from light load to full load) is almost unity.
5.2 Dynamic conditions
PSO-PI controller ensures to keep the output voltage constant under transient conditions like load and line variations. The input voltage used for the simulation is 36 V(rms). When there is a change in voltage at the AC side or change in load at load side, DC output voltage of the converter will get changed. At this condition, PSO tuned PI controller will act fast to make the voltage error zero. Figures 8 and 9 show the performance of the system for line variations and load variations, respectively. Performance of the converter with Ziegler–Nichols (ZN) PI, Chien–Hrones–Reswick (CHR) PI without overshoot and PSO-PI controller has been studied. ZN-PI and CHR-PI tuning has been achieved from the step response of the system. Performances of the system under steady-state conditions are same, but performances under transient conditions differed. Table 3 shows that PSO-PI controller gives better performance under transient conditions than ZN-PI and CHR-PI controller.

Experimental setup
6 Experimental results and discussion
Experimental setup for PFC in switched-mode AC–DC converter for HBLED lighting with particle swarm optimization tuned PI controller for fast regulation is implemented using Spartan-6 FPGA controller. The setup is shown in Fig. 10. One Hall effect current sensor (HE055T01) is used to sense the input current, and resistor divider is used to sense the output voltage. For scaling and offset correction, control circuits were built. One insulated gate bipolar junction transistor (FGA25N) is used as a switch, and TLP 250 gate driver is used. Load consists of four LED strings, and each string has five HBLED. Voltage and power rating of each HBLED are 20 V and 5W, respectively. Since FPGA works in a digital platform, general form (time domain) of PI controller is discretized using backward difference method.
General form of PI controller in time domain can be written as follows (23):
Differentiating the above equation
The above equation is discretized using backward difference method, and discretized equation is solved for y(t). It is given by (24)
\(K_\mathrm{p}\) and \(K_\mathrm{i}\) are proportional and integral gain constants of PI controller. \(T_\mathrm{s}\) is sampling period.
6.1 Steady-state conditions
Input voltages and input current for various load are shown in Fig. 11. From the figures, it is understood that input current is in phase with input voltage and power factor for all loads is maintained at 0.999. At the light load condition, enough noise margin is not available. So, the THD of input current is somewhat higher at light load conditions. Variable-band hysteresis (VBH)-type control can improve THD even at the light loads. While increasing the load, THD is getting improved. At full load, THD is 4%. Rated output voltage and THD for full load are shown in Fig. 12. THD of input current is validated as per the standards of IEC 61000-3-2 of class C equipment’s. Figure 13 shows the power quality indices for Various loads.

Input voltage and input current for different loads, channel 1: input voltage 20 V/div, channel 2: input current 2 A/div (1 A:3 A), a for 25-W load, b for 100-W load

Steady-state performance: a output voltage of the AC–DC converter, b THD for full load

Power quality indices for different loads

Performance under line transients, channel 1: input voltage 2 V/div, 1 V:19.2 V, channel 2: input current 1 A/div, 1 A:3 A, channel 3: output voltage, 1 V/div, 1 V:43.3 V. a Performance for positive step change in input (36–42 V), b performance for negative step change in input (36–30 V)

Performance under load transients, channel 1: input voltage 2 V/div, 1 V:19.2 V, channel 2: input current 1 A/div, 1 A:3 A, channel 3: output voltage 1 V/div, 1 V:43.3 V. a Performance for positive step change in load (75–100 W), b performance for negative step change in load (100–75 W)
6.2 Dynamic conditions
The performance of the proposed system is validated under the transient conditions. When there is positive and negative step changes in input voltage, output voltage is maintained constant. Figure 14 shows the performance of the system under input transients.
Figure 15 shows the performance for the load transients. When load is increased from 75 to 100 W or decreased from 100 to 75 W, the proposed system after 6 cycles comes to stable position.
From the above results, it is observed that output voltage is maintained constant even though there is a change in input. For the load transients, there is a small deviation with simulation results (3 cycles).
7 Conclusion
In this paper, PFC AC–DC converter with positive-output super-lift Luo converter as PFC topology is presented for high-brightness light-emitting diode applications. In order to achieve better dynamic performance, particle swarm optimization tuned proportional–integral (PI) controller is used. State space averaging method and Leverrier algorithm are used for the modeling of converter. A laboratory model was built and tested. Experimental results show that input current is in phase with input voltage for all load conditions and voltage regulation is achieved in a fast manner when subjected to line and load transients. At full load conditions, total harmonic distortion of the input current, voltage ripple and efficiency are 4%, 0.79 V and 82.43%, respectively. THD of the input current helps to meet out the standards given by IEC 61000-3-2 of class c equipments. In the future, variable-band hysteresis-type control along with fractional controller could be implemented to improve the THD and stability of the converter.
Change history
19 August 2024
This article has been retracted. Please see the Retraction Notice for more detail: https://doi.org/10.1007/s00500-024-10066-w
References
Alongea F, Puccib M, Rabbeniab R, Vitale G (2017) Dynamic modeling of a quadratic DC/DC single-switch boost converter. Electr Power Syst Res 152:130–139
Astrom KJ, Tagglund T (1995) PID controllers theory design and tuning. Instrument Soceity of America, NC
Babu KSH, Holde R, Singh BK (2018) Power factor correction using boost converter operating in CCM for front-end AC to DC conversion. In: Technologies for smart-city energy security and power (ICSESP), Bhubaneswar, India, pp 1–8
Bouafassa A, Rahmani L, Mekhilef S (2015) Design and real time implementation of single phase boost power factor correction converter. ISA Trans 55:267–274
Du K-L, Swamy MNS (2016) Particle swarm optimization. In: Search and optimization by metaheuristics, pp 153–173
Durga Devi S, Uma Maheswari MG (2017) Analysis and design of single phase power factor correction using DC–DC SEPIC converter with bangbangand PSO based fixed PWM techniques. In: Proceedings of the international conference on power engineering, computing and CONtrol ( PECCON-2017), Chennai, India, pp 79–86
Dutta A, Ang SS (2016) Electromagnetic interference simulations for wide-bandgap power electronic modules. IEEE J Emerg Sel Top Power Electron 4(3):757–766
El-Moniema MSA, Azazi HZ, Mahmoud SA (2013) A Voltage sensorless power factor correction control for LED lamp driver. Alex Eng J 52(4):643–653
El-Moniema MSA, Azazi HZ, Mahmoud SA (2014) A current sensorless power factor correction control for LED lamp driver. Alex Eng J 53(1):69–79
Garg MM, Hote YV (2015) Leverrier algorithm based reduced order modeling of dc–dc converters. In: Proceedings of 6th India international conference on power electronics (IICPE) Kurukshetra, India, pp 1–6
Han J, Zhang B, Qiu D (2016) Unified model of boost converter in continuous and discontinuous conduction modes. IET Power Electron 9(10):2036–2043
Jasdeep K, Sheela T (2014) Performance comparison of variants of ant colony optimization technique for online tuning of a PI controller for a three phase induction motor drive. Int J Comput Sci Inf Technol 5(4):5814–5820
Jha A, Singh B (2016) Zeta converter for power quality improvement for multi-string LED driver. In: IEEE industry applications society annual meeting, Portland, USA, pp 1–8
Kaveh A (2014) Particle swarm optimization. Advances in metaheuristic algorithms for optimal design of structures. Springer, Switzerland, pp 9–40
Kim J, Choi H, Won C-Y (2018) New modulated carrier controlled PFC boost converter. IEEE Trans Power Electron 33(6):4772–4782
Kumar K, Jeevannantham S (2013) Design and implementation of reduced-order sliding mode controller plus proportional double integral controller for negative output elementary super-lift Luo-converter. IET Power Electron 6(5):974–989
Leon-Masich A, Valderrama-Blavi H, Bosque-Moncusí JM, Martínez-Salamero L (2016) A high-voltage sic-based boost PFC for LED applications. IEEE Trans Power Electron 31(2):1633–1642
Lin X, Wang F (2018) New bridgeless buck PFC converter with improved input current and power factor. IEEE Trans Ind Electron 65(10):7730–7740
Luo FL, Ye H (2004) Advanced DC–DC converters. CRC Press, Boca Raton
Marini F, Walczak B (2019) Particle swarm optimization (PSO). Tutor Chemom Intell Lab Syst 149:153–165
Meena DC, Devanshu A (2017) Genetic algorithm tuned PID controller for process control. In: International conference on inventive systems and control (ICISC), Coimbatore, India
Miao S, Wang F, Ma X (2016) A new transformerless buck-boost converter with positive output voltage. IEEE Trans Ind Electron 63(5):2965–2975
Mokal BP, Vadirajacharya K (2017) Extensive modeling of DC–DC cuk converter operating in continuous conduction mode. In: International conference on circuit, power and computing technologies (ICCPCT), Kollam, India, pp 1–6
Nath SA, Pradeep J (2016) PV based design of improved positive output super-lift Luo converter. In: Proceedings of international conference on science technology engineering and management (ICONSTEM), Chennai, India, pp 293–297
Patral SR, Choudhuri TR, Nayak B (2017) Comparative analysis of boost and buck-boost converter for power factor correction using hysteresis band current control. In: IEEE international conference on power electronics. Intelligent control and energy systems (ICPEICES-2016), Delhi, India, pp 1–6
Piaoa C, Qiaoa H, Teng C (2012) Digital control algorithm for two-stage DC–DC converters. In: International conference on future energy, environment and materials, pp 265-271
Premalathab SA (2017) Design of an efficient positive output self-lift and negative output self-lift Luo converters using drift free technique for photovoltaic applications. In: First international conference on power engineering computing and CONtrol (PECCON-2017 ) Vellore, India, pp 651–657
Ramirez JA, López JM, Lezamaand N, Muñoz G (2018) Particle swarm metaheuristic applied to the optimization of a PID controller. J Contemp Eng Sci 11(67):3333–3342
Ribeiro JMS, Santos MF, Carmo MJ, Silva MF (2017) Comparison of PID controller tuning methods: analytical/classical techniques versus optimization algorithms. In: International carpathian control conference (ICCC), Sinaia, Romania, pp 533–538
Shen C-L, Ko Y-X (2014) Hybrid-input power supply with PFC (power factor corrector) and MPPT (maximum power point tracking) features for battery charging and HB-LED driving. Energy 74:501–509
Shrivastava A, Singh B (2013) A universal input single-stage front end power factor corrector for HB-LED lighting applications. In: Proceedings of annual IEEE India conference (INDICON), Kochi, India, pp 195–1099
Tayebi M, Baba-Ali AR (2015) Particle swarm optimization with improved bio-inspired bees. In: Modelling, computation and optimization in information systems and management sciences, vol 360, pp 197–208
Tekade SA, Juneja R, Kurwale M, Debre P (2016) Design of positive output super-lift Luo boost converter for solar inverter. In: International conference on energy efficient technologies for sustainability (ICEETS), Nagercoil, India, pp 1–4
Vincent A, Nersisson R (2017) Particle swarm optimization based proportional integral derivative controller tuning for level control of two tank system. In: ICSET-2017, Vellore, India, pp 1–7
Wen P, Hu C, Yang H, Zhang L, Deng C, Li Y (2014) A two stage DC/DC converter with wide input range for EV. In: International power electronics conference, Hiroshima, Japan, pp 782–789
Xu X, Collin A, Djokic SZ, Langella R, Testa A, Drapela J (2018) Experimental evaluation and classification of LED lamps for typical residential applications. In: IEEE PES innovative smart grid technologies conference Europe (ISGT-Europe), Torino, Italy, pp 1–6
Yang H-T, Chiang H-W, Chen C-Y (2015) Implementation of bridgeless cuk power factor corrector with positive output voltage. IEEE Trans Ind Appl 51(4):3325–3333
Yang N, Wu C, Jia R, Liu C (2016) Modeling and characteristics analysis for a buck-boost converter in pseudo-continuous conduction mode based on fractional calculus. In: Mathematical problems in engineering, pp 1–6
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared that they have no conflict of interest.
Ethical approval
No animals and humans are involved.
Informed consent
We use our own content.
Additional information
Communicated by V. Loia.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article has been retracted. Please see the retraction notice for more detail: https://doi.org/10.1007/s00500-024-10066-w"
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jambulingam Jawahar Babu, Thirumavalavan, V. RETRACTED ARTICLE: Switched-mode Luo converter with power factor correction and fast regulation under transient conditions. Soft Comput 24, 13319–13329 (2020). https://doi.org/10.1007/s00500-020-04747-5
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-020-04747-5