
Abstract
Braess’s paradox states that removing a part of a network may improve the players’ latency at equilibrium. In this work, we study the approximability of the best subnetwork problem for the class of random \({\mathcal {G}}_{n,p}\) instances proven prone to Braess’s paradox by Valiant and Roughgarden RSA ’10 (Random Struct Algorithms 37(4):495–515, 2010), Chung and Young WINE ’10 (LNCS 6484:194–208, 2010) and Chung et al. RSA ’12 (Random Struct Algorithms 41(4):451–468, 2012). Our main contribution is a polynomial-time approximation-preserving reduction of the best subnetwork problem for such instances to the corresponding problem in a simplified network where all neighbors of source s and destination t are directly connected by 0 latency edges. Building on this, we consider two cases, either when the total rate r is sufficiently low, or, when r is sufficiently high. In the first case of low \(r= O(n_{+})\), here \(n_{+}\) is the maximum degree of \(\{s, t\}\), we obtain an approximation scheme that for any constant \(\varepsilon > 0\) and with high probability, computes a subnetwork and an \(\varepsilon \)-Nash flow with maximum latency at most \((1+\varepsilon )L^*+ \varepsilon \), where \(L^*\) is the equilibrium latency of the best subnetwork. Our approximation scheme runs in polynomial time if the random network has average degree \(O(\mathrm {poly}(\ln n))\) and the traffic rate is \(O(\mathrm {poly}(\ln \ln n))\), and in quasipolynomial time for average degrees up to o(n) and traffic rates of \(O(\mathrm {poly}(\ln n))\). Finally, in the second case of high \(r= {\varOmega }(n_{+})\), we compute in strongly polynomial time a subnetwork and an \(\varepsilon \)-Nash flow with maximum latency at most \((1+2\varepsilon + o(1))L^*\).
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
An instance of a (non-atomic) selfish routing game consists of a network with a source s and a sink t, and a traffic rate r divided among an infinite number of infinitesimally small players. A picturesque way to see a large network of links shared by many infinitesimally small selfish users is as a large pipeline infrastructure with users as liquid molecules flowing into it. Every edge has a non-decreasing function that determines the edge’s latency caused by its traffic. Each player routes a negligible amount of traffic through an \(s-t\) path. Observing the traffic caused by others, every player selects an \(s-t\) path that minimizes the sum of edge latencies. Thus, the players reach a Nash equilibrium (a.k.a., a Wardrop equilibrium), where all players use paths of equal minimum latency, while the remaining unused paths have higher (unappealing) latency. Under some general assumptions on the latency functions, a Nash equilibrium flow (or simply a Nash flow) exists, it is efficiently computable and the common players’ latency in a Nash flow is essentially unique (see e.g., [32]).
When the owner of such a selfishly congested network tries to improve its flow speed, the common sense suggests to focus and fix links that seem older and slower. Contrary to this belief, Braess’s paradox illustrates that destroying a part of a network, even of the most expensive infrastructure, can improve its performance. So a wise owner should take steps cautiously and benefit by exploiting the nature of this paradox. There are a few natural approaches for improving network performance. A simple approach, not requiring any network modifications, is Stackelberg routing. The network owner dictatorially controls a small fraction of flow, aiming to improve the induced routing performance of the remaining selfish flow. Unfortunately, there are examples of unboundedly bad performance under any possible control attempt made by the owner. Another side effect is that the dictatorially controlled flow is usually sacrificed through slower paths, compared to the latency faced by the remaining free flow. An alternative approach is to introduce economic incentives, usually modeled as flow-dependent per-unit-of-flow tolls, that influence the users selfish choices towards improving performance. However, the idea of tolls is not appealing to the users, since large tolls increase the users disutility: routing time plus tolls paid, see details in [7]. A simple and easy to implement way out from the above side effects is to exploit the essence of Braess’s paradox towards improving network performance.
Previous Work It is well known that a Nash flow may not optimize the network performance, usually measured by the total latency incurred by all players. Thus, in the last decade, there has been a significant interest in quantifying and understanding the performance degradation due to the players’ selfish behavior, and in mitigating (or even eliminating) it using several approaches, such as introducing economic disincentives (tolls) [7] for the use of congested edges, or exploiting the presence of centrally coordinated players (Stackelberg routing) [31], see also [32] for more references. A simple way to improve the network performance at equilibrium is to exploit Braess’s paradox [3, 26], namely the fact that removing some edges may improve the latency of the Nash flow (see e.g., Fig. 1 for an example and [27, 33] for more bibliography). Thus, given an instance of selfish routing, one naturally seeks for the best subnetwork, i.e. the subnetwork minimizing the common players’ latency at equilibrium. Compared against Stackelberg routing and tolls, edge removal is simpler and more appealing to both the network administrator and the players (see e.g., [10] for a discussion).

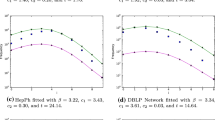
a The optimal total latency is 3 / 2, achieved by routing half of the flow on each of the paths (s, v, t) and (s, w, t). In the (unique) Nash flow, all traffic goes through the path (s, v, w, t) and has a latency of 2. b If we remove the edge (v, w), the Nash flow coincides with the optimal flow. Hence the network b is the best subnetwork of network a
Despite the intense research [30, Sect. 5.1.2] for algorithmically detecting the paradox, little positive results have been shown rigorously. Unfortunately, Roughgarden [33] proved that it is \(\mathrm {NP}\)-hard not only to find the best subnetwork, but also to compute any meaningful approximation to its equilibrium latency. Specifically, he proved that even for linear latencies, it is \(\mathrm {NP}\)-hard to approximate the equilibrium latency of the best subnetwork within a factor of \(4/3 - \varepsilon \), for any \(\varepsilon > 0\), i.e., within any factor less than the worst-case Price of Anarchy for linear latencies. On the positive side, applying Althöfer’s Sparsification Lemma [1, 21], Fotakis et al. [10] presented an algorithm that approximates the equilibrium latency of the best subnetwork within an additive term of \(\varepsilon \), for any constant \(\varepsilon > 0\), in time that is subexponential if the total number of \(s-t\) paths is polynomial, all paths are of polylogarithmic length, and the traffic rate is constant.
Interestingly, Braess’s paradox can be dramatically more severe in networks with multiple sources and sinks. More specifically, Lin et al. [19] proved that for networks with a single source-sink pair and general latency functions, the removal of at most k edges cannot improve the equilibrium latency by a factor greater than \(k+1\). On the other hand, Lin et al. [19] presented a network with two source-sink pairs where the removal of a single edge improves the equilibrium latency by a factor of \(2^{{\varOmega }(n)}\). As for the impact of the network topology, Milchtaich [24] proved that Braess’s paradox does not occur in series-parallel networks, which is precisely the class of networks that do not contain the network in Fig. 1a as a topological minor.
Recent work actually indicates that the appearance of Braess’s paradox is not an artifact of optimization theory, and that edge removal can offer a tangible improvement on the performance of real-world networks (see e.g., [17, 28, 32, 35]). In this direction, Valiant and Roughgarden [36] initiated the study of Braess’s paradox in natural classes of random networks, and proved that the paradox occurs with high probability in dense random \({\mathcal {G}}_{n,p}\) networks, with \(p = \omega (n^{-1/2})\), if each edge e has a linear latency \(\ell _e(x) = a_e x + b_e\), with \(a_e\), \(b_e\) drawn independently from some reasonable distribution. The subsequent work of Chung and Young [5] extended the result of [36] to sparse random networks, where \(p = {\varOmega }(\ln n /n)\), i.e., just greater than the connectivity threshold of \({\mathcal {G}}_{n,p}\), assuming that the network has a large number of edges e with small additive latency terms \(b_e\). In fact, Chung and Young demonstrated that the crucial property for Braess’s paradox to emerge is that the subnetwork consisting of the edges with small additive terms is a good expander (see also [6]). Nevertheless, the proof of [5, 6, 36] is merely existential; it provides no clue on how one can actually find (or even approximate) the best subnetwork and its equilibrium latency.
In all the work above, the graph G and the latencies \(\ell \) are random. But, the traffic r is adversarial and selected for the paradox to occur whp. Roughgarden raised the question of random traffic \(r > 0\), or, investigating the range of r that causes the paradox, citing the works [12, 28] with evidence of r ranges that the paradox is unlikely. A related question is to identify the vulnerable network topologies [30, pp. 125–126] that, given a graph G, there is a choice of traffic value \(r_G\) and latency functions \(\ell _G\) that cause the Braess paradox to occur. As a sharp contrast, vulnerable graphs are easy [8, 24, 26].
Motivation and Contribution The motivating question for this work is whether in some interesting settings, where the paradox occurs, we can efficiently compute a set of edges whose removal significantly improves the equilibrium latency. From a more technical viewpoint, our work is motivated by the results of [5, 6, 36] about the prevalence of the paradox in random networks, and by the knowledge that in random instances some hard (in general) problems can actually be tractable.
It is well known that a NP-completeness reduction may use complex structures that may rarely occur in generic/realistic instances. NP-completeness focus to the worst-case analysis of a given class of instances, while it provides limited or no information about the algorithmic hardness of the typical (overwhelming majority of) instances. There is a need to get a bigger picture of the complexity landscape. Therefore, a way to widen this limited view of an NP-hard proof, is to suggest the probabilistic analysis of algorithms [14, 16]. Where, a meaningful target is to exhibit that algorithmic hard instances come up often, or show that hard cases are rare, given a distribution that resembles most of the problem’s rich landscape. Towards to achieve more insight in the underlying algorithmic complexity for the majority of the instances, random instances are used for evaluating algorithms for NP-hard problems. Random instances are cheap and usually (but not always) lack structures that expose information and facilitate the running time of algorithms, often unavoidably hidden in deterministic instances. Random instances often provide control parameters for important characteristics, such as expected hardness and/or (in)solubility, that help to validate and improve sophisticated heuristics [15, 25, 34]. Of course, instances obtained from real-world applications are the best source, albeit of limited supply and sometimes suffer being structured/oriented towards specific applications. On the positive side, there is a wide experience, constantly updated from ongoing competitions [15, 38, 39], illustrating the strong correlation (wrt algorithm performance) between real-world and random instances. Hence, in the last 20 years an area of intense research in Artificial Intelligence (AI) [4, 18, 23], Computer Science (CS) [11] and Statistical Mechanics (SM) [22] has been the typical algorithmic complexity of hard problems wrt the Erdös-Rényi \(G_{n, p}\) (or G(n, m)) model [2] of random instances.
Departing from [5, 36], we adopt a purely algorithmic approach. We focus on the class of so-called good selfish routing instances, namely instances with the properties used by [5, 36] to demonstrate the occurrence of Braess’s paradox in random networks with high probability. In fact, one can easily verify that the random instances of [5, 36] are good with high probability. Rather surprisingly, we prove that, in many interesting cases, we can efficiently approximate the best subnetwork and its equilibrium latency. What may be even more surprising is that our approximation algorithm is based on the expansion property of good instances, namely the very same property used by [5, 36] to establish the prevalence of the paradox in good instances! To the best of our knowledge, our results are the first of theoretical nature which indicate that Braess’s paradox can be efficiently eliminated in a large class of interesting instances. In particular, our work exploits algorithmically the paradox down to the connectivity threshold \(p= \frac{\ln n}{n}\) wrt control parameter p of a random \({\mathcal {G}}_{n,p}\) graph [9]. Our argument relies strongly to the existence of many “short & fast paths” that connect the neighbors of s to the neighbors of t. Since the existence of such paths is critically related to the connectivity threshold, we believe it is also interesting to explore for parameter p ranging below this threshold, whether the paradox can still be efficiently exploited or not. Another source of randomness is the random coefficient model wrt edge latencies. But, our main focus is to assume the same assumptions for the random edge coefficients as in [5, 6, 36]. Of course, if we change the coefficient’s distribution it is possible to ruin the existence of such fast paths, despite p ranging above the connectivity threshold.
Technically, we present essentially an approximation scheme. In the first case of low \(r= O(n_{+})\), with \(n_{+}\) the maximum degree of \(\{s, t\}\), given a good instance and any constant \(\varepsilon > 0\), we compute a flow g that is an \(\varepsilon \)-Nash flow for the subnetwork consisting of the edges used by it, and has a latency of \(L(g) \le (1+\varepsilon )L^*+ \varepsilon \), where \(L^*\) is the equilibrium latency of the best subnetwork (Theorem 1). In fact, g has these properties with high probability. Our approximation scheme runs in polynomial time for the most interesting case that the network is relatively sparse and the traffic rate r is \(O(\mathrm {poly}(\ln \ln n))\), where n is the number of vertices. Specifically, the running time is polynomial if the good network has average degree \(O(\mathrm {poly}(\ln n))\), i.e., if \(p n = O(\mathrm {poly}(\ln n))\), for random \({\mathcal {G}}_{n,p}\) networks, and quasipolynomial for average degrees up to o(n). As for the traffic rate, we emphasize that most work on selfish routing and selfish network design problems assumes that \(r = 1\), or at least that r does not increase with the network’s size (see e.g., [32] and the references therein). So, we can approximate, in polynomial-time, the best subnetwork for a large class of instances that, with high probability, include exponentially many \(s-t\) paths and \(s-t\) paths of length \({\varTheta }(n)\). For such instances, a direct application of [10, Theorem 3] gives an exponential-time algorithm. Finally, in the second case of high \(r= {\varOmega }(n_{+})\), we compute in strongly polynomial time a subnetwork with maximum latency at most \((1+2\varepsilon + o(1))L^*\).
The main idea behind our approximation scheme, and our main technical contribution, is a polynomial-time approximation-preserving reduction of the best subnetwork problem for a good network G to a corresponding best subnetwork problem for a 0-latency simplified network \(G_0\), which is a layered network obtained from G if we keep only s, t and their immediate neighbors, and connect all neighbors of s and t by direct edges of 0 latency. We first show that the equilibrium latency of the best subnetwork does not increase when we consider the 0-latency simplified network \(G_0\) (Lemma 1). Although this may sound reasonable, we highlight that decreasing edge latencies to 0 may trigger Braess’s paradox (e.g., starting from the network in Fig. 1a with \(l'_{3}(x) = 1\), and decreasing it to \(l_{3}(x) = 0\) is just another way of triggering the paradox). Next, we employ Althöfer’s Sparsification Lemma [1] (see also [20, 21] and [10, Theorem 3]) and approximate the best subnetwork problem for the 0-latency simplified network.
The final (and crucial) step of our approximation preserving reduction is to start with the flow-solution to the best subnetwork problem for the 0-latency simplified network, and extend it to a flow-solution to the best subnetwork problem for the original (good) instance. To this end, we show how to “simulate” 0-latency edges by low latency paths in the original good network. Intuitively, this works because due to the expansion properties and the random latencies of the good network G, the intermediate subnetwork of G, connecting the neighbors of s to the neighbors of t, essentially behaves as a complete bipartite network with 0-latency edges. This is also the key step in the approach of [5, 36], showing that Braess’s paradox occurs in good networks with high probability (see [5, Section 2] for a detailed discussion). Hence, one could say that to some extent, the reason that Braess’s paradox exists in good networks is the very same reason that the paradox can be efficiently resolved. Though conceptually simple, the full construction is technically involved and requires dealing with the amount of flow through the edges incident to s and t and their latencies. Our construction employs a careful grouping-and-matching argument, which works for good networks with high probability, see Lemmas 5 and 6 .
We highlight that the reduction itself runs in polynomial time. The time consuming step is the application of [10, Theorem 3] to the 0-latency simplified network. Since such networks have only polynomially many (and very short) \(s-t\) paths, they escape the hardness result of [33]. The approximability of the best subnetwork for 0-latency simplified networks is an intriguing open problem arising from our work.
Our result shows that a problem, that is \(\mathrm {NP}\)-hard to approximate, can be very closely approximated in random (and random-like) networks. This resembles e.g., the problem of finding a Hamiltonian path in Erdös-Rényi graphs, where again, existence and construction both work just above the connectivity threshold, see e.g., [2]. However, not all hard problems are easy when one assumes random inputs (e.g., consider factoring or the hidden clique problem, for both of which no such results are known in full depth).
2 Model and Preliminaries
Notation For an event E in a sample space, \(\mathrm {I\!P}[E]\) denotes the probability of E happening. We say that an event E occurs with high probability, if \(\mathrm {I\!P}[E] \ge 1 - n^{-\alpha }\), for some constant \(\alpha \ge 1\), where n usually denotes the number of vertices of the network G to which E refers. We implicitly use the union bound to account for the occurrence of more than one low probability events.
Instances A selfish routing instance is a tuple \({\mathcal {G}}= (G(V, E), (\ell _e)_{e \in E}, r)\), where G(V, E) is an undirected network with a source s and a sink t, \(\ell _e : \mathrm {I\!R}_{\ge 0} \rightarrow \mathrm {I\!R}_{\ge 0}\) is a non-decreasing latency function associated with each edge e, and \(r > 0\) is the traffic rate. A picturesque way to see the total traffic rate r in a large network of links is that there are many infinitesimally small selfish users of total volume r that flow into a large pipeline infrastructure. That is, users are considered as liquid molecules that start to flow from node s through the available pipelines of the smallest latency, trying to reach destination node t. We let \({\mathcal {P}}\) (or \({\mathcal {P}}_G\), whenever the network G is not clear from the context) denote the (non-empty) set of simple \(s-t\) paths in G. For brevity, we usually omit the latency functions, and refer to a selfish routing instance as (G, r).
We only consider linear latencies \(\ell _e(x) = a_e x + b_e\), with \(a_e, b_e \ge 0\). These encapsulate that the time delay (latency), on any edge a particular commuter decides to walk, increases when x other commuters also decide to walk along it, with a rate that depends on the road specific characteristics \(a_e, b_e\). We restrict our attention to instances where the coefficients \(a_e\) and \(b_e\) are randomly selected from a pair of distributions \({\mathcal {A}}\) and \({\mathcal {B}}\). Following [5, 6, 36], we define:
Definition 1
We say that \({\mathcal {A}}\) and \({\mathcal {B}}\) are reasonable if:
-
1.
\({\mathcal {A}}\) has bounded range \([A_{\min }, A_{\max }]\) and \({\mathcal {B}}\) has bounded range \([0, B_{\max }]\), where \(A_{\min }> 0\) and \(A_{\max }\), \(B_{\max }\) are constants, i.e., they do not depend on r and |V|.
-
2.
There is a closed interval \(I_{{\mathcal {A}}}\) of positive length, such that for every non-trivial subinterval \(I' \subseteq I_{{\mathcal {A}}}\), \(\mathrm {I\!P}_{a \sim {\mathcal {A}}}[a \in I'] > 0\).
-
3.
There is a closed interval \(I_{{\mathcal {B}}}\), \(0 \in I_{{\mathcal {B}}}\), of positive length, such that for every non-trivial subinterval \(I' \subseteq I_{{\mathcal {B}}}\), \(\mathrm {I\!P}_{b \sim {\mathcal {B}}}[b \in I'] > 0\). Moreover, for any constant \(\eta > 0\), there exists a constant \(\delta _\eta > 0\), such that \(\mathrm {I\!P}_{b \sim {\mathcal {B}}}[b \le \eta ] \ge \delta _\eta \).
Subnetworks Given a selfish routing instance (G(V, E), r), any subgraph \(H(V', E')\), \(V' \subseteq V\), \(E' \subseteq E\), \(s, t \in V'\), obtained from G by edge and vertex removal, is a subnetwork of G. H has the same source s and sink t as G, and the edges of H have the same latencies as in G. Every instance \((H(V', E'), r)\), where \(H(V', E')\) is a subnetwork of G(V, E), is a subinstance of (G(V, E), r).
Given a network G and a traffic rate r, there are exponentially many subnetworks, each incurring its own common path latency. Therefore the problem of detecting the particular subnetwork that achieves the minimum common path latency is a combinatorial one with exponential worst case complexity.
Flows Given an instance (G, r), a (feasible) flow f is a non-negative vector \(\langle f_q: q \in {\mathcal {P}}\rangle \) indexed by \({\mathcal {P}}\) such that \(\sum _{q \in {\mathcal {P}}} f_q = r\). That is, \(f_q\) is the amount of flow routed from s to t through the links of path \(q \in {\mathcal {P}}\). For a flow f, let \(f_e = \sum _{q: e \in q} f_q\) be the amount of flow that f routes on edge e through all the paths that traverse e. That is, path flow f induces the non-negative vector \(\langle f_e: e \in E\rangle \) indexed by E. Two flows f and g are different if there is an edge e with \(f_e \ne g_e\). An edge e is used by flow f if \(f_e > 0\), and a path q is used by f if \(\min _{e \in q} \{ f_e \} > 0\). We often write \(f_q > 0\) to denote that a path q is used by f. Given a flow f, the latency of each edge e is \(\ell _e(f_e)\), the latency of each path q is \(\ell _q(f) = \sum _{e \in q} \ell _e(f_e)\), and the latency of f is \(L(f) = \max _{q: f_q > 0} \ell _q(f)\). We sometimes write \(L_G(f)\) when the network G is not clear from the context. For an instance (G(V, E), r) and a flow f, we let \(E_f = \{ e \in E : f_e > 0 \}\) be the set of edges used by f, and \(G_f(V, E_f)\) be the corresponding subnetwork of G.
Our notation is based on the fact that each path flow \(\langle f_q: q \in {\mathcal {P}}\rangle \) induces a unique edge flow \(\langle f_e: e \in E\rangle \), see [29, Th. 2.2]. In general, the converse is not true since in an edge flow it is possible to induce cycles with positive flow, see [29, Sect. 2.2.2]. But, in our case, all edges have strictly increasing latencies, therefore, in (or in a social optimum flow) a Nash equilibrium it is not possible for a positive amount of flow to be trapped in cycles. This nice observation allows us to conveniently interchange between path and edge flows. This nice fact that Nash flows are acyclic and independent of the particular flow decomposition is extensively and implicitly being used in recent works, see for example in [38] Proposition 2.4 and the paragraph above it.
Nash Flow A flow f is a Nash (equilibrium) flow, if it routes all traffic on minimum latency paths. Formally, f is a Nash flow if for every path q with \(f_q > 0\), and every path \(q'\), \(\ell _q(f) \le \ell _{q'}(f)\). Therefore, in a Nash flow f, all players incur a common latency \(L(f) = \min _{q} \ell _q(f) = \max _{q: f_q > 0} \ell _q(f)\) on their paths. A Nash flow f on a network G(V, E) is a Nash flow on any subnetwork \(G'(V', E')\) of G with \(E_f \subseteq E'\).
Every instance (G, r) admits at least one Nash flow, and the players’ latency is the same for all Nash flows (see e.g., [32]). Hence, we let L(G, r) be the players’ latency in some Nash flow of (G, r), and refer to it as the equilibrium latency of (G, r). For linear latency functions, a Nash flow can be computed efficiently, in strongly polynomial time, while for strictly increasing latencies, the Nash flow is essentially unique (see e.g., [32]).
\(\varepsilon \)-Nash flow The definition of a Nash flow can be naturally generalized to that of an “almost Nash” flow. Formally, for some \(\varepsilon > 0\), a flow f is an \(\varepsilon \)-Nash flow if for every path q with \(f_q > 0\), and every path \(q'\), \(\ell _q(f) \le \ell _{q'}(f) + \varepsilon \).
Best Subnetwork Braess’s paradox shows that there may be a subinstance (H, r) of an instance (G, r) with \(L(H, r) < L(G, r)\) (see e.g., Fig. 1). The best subnetwork \(H^*\) of (G, r) is a subnetwork of G with the minimum equilibrium latency, i.e., \(H^*\) has \(L(H^*, r) \le L(H, r)\) for any subnetwork H of G. In this work, we study the approximability of the Best Subnetwork Equilibrium Latency problem, or \(\mathrm {BestSubEL}\) in short. In \(\mathrm {BestSubEL}\), we are given an instance (G, r), and seek for the best subnetwork \(H^*\) of (G, r) and its equilibrium latency \(L(H^*, r)\).
Good Networks We restrict our attention to undirected \(s-t\) networks G(V, E). We let \(n \equiv |V|\) and \(m \equiv |E|\). For any vertex v, we let \({\varGamma }(v) = \{ u \in V: \{ u, v \} \in E \}\) denote the set of v’s neighbors in G. Similarly, for any non-empty \(S \subseteq V\), we let \({\varGamma }(S) = \bigcup _{v \in S} {\varGamma }(v)\) denote the set of neighbors of the vertices in S, and let G[S] denote the subnetwork of G induced by S. For convenience, we let \(V_s \equiv {\varGamma }(s)\), \(E_s \equiv \{ \{ s, u \}: u \in V_s \}\), \(V_t \equiv {\varGamma }(t)\), \(E_t \equiv \{ \{ v, t \}: v \in V_t \}\), and \(V_m \equiv V \setminus ( \{s, t\} \cup V_s \cup V_t)\). We also let \(n_s = |V_s|\), \(n_t = |V_t|\), \(n_{+}= \max \{n_s, n_t\}\), \(n_{-}= \min \{ n_s, n_t \}\), and \(n_m = |V_m|\). We sometimes write V(G), n(G), \(V_s(G)\), \(n_s(G)\), \(\ldots \), if G is not clear from the context.
It is convenient to think that the network G has a layered structure consisting of s, the set of s’s neighbors \(V_s\), an “intermediate” subnetwork connecting the neighbors of s to the neighbors of t, the set of t’s neighbors \(V_t\), and t. Then, any \(s-t\) path starts at s, visits some \(u \in V_s\), proceeds either directly or through some vertices of \(V_m\) to some \(v \in V_t\), and finally reaches t.
Our layered graph construction above allows us to think that each path latency is only contributed by the latency of the edge exiting s plus the edge latency entering to t, while the remaining edges (those not touching s, t) of the path contribute 0 latency. The main concern here is that a path, while exiting \(V_s\) and visiting vertices in \(V_m\), is possible to come back and visit again some vertex in \(u \in V_s\). This bad scenario can hurt our argument only if this path also sends positive flow back from u to s. In this scenario however, a cycle appears, but, as mentioned above, it is known that an arbitrary Nash equilibrium can be made acyclic with no increase of the common latency. The idea is that a Nash equilibrium is the solution of a convex program and hence, we can remove the flow trapped around a cycle (it important that it traverses edges with strictly increasing latency functions, otherwise the removing of circulated flow would not turn beneficial) without increasing any path latency. See for example the recent work [33] below Proposition 2.3, or, for a detailed exhibition of this argument the nice book of Patriksson [29, Sect. 2.2.2].
Thus, we refer to \(G_m \equiv G[V_s \cup V_m \cup V_t]\) as the intermediate subnetwork of G. Depending on the structure of \(G_m\), we say that:
-
G is a random \({\mathcal {G}}_{n, p}\) network if (i) \(n_s\) and \(n_t\) follow the binomial distribution with parameters n and p, and (ii) if any edge \(\{ u, v \}\), with \(u \in V_m \cup V_s\) and \(v \in V_m \cup V_t\), exists independently with probability p. Namely, the intermediate network \(G_m\) is an Erdös-Rényi random graph with \(n - 2\) vertices and edge probability p, except for the fact that there are no edges in \(G[V_s]\) and in \(G[V_t]\).
-
G is internally bipartite if the intermediate network \(G_m\) is a bipartite graph with independent sets \(V_s\) and \(V_t\). G is internally complete bipartite if every neighbor of s is directly connected by an edge to every neighbor of t.
-
G is 0-latency simplified if it is internally complete bipartite and every edge e connecting a neighbor of s to a neighbor of t has latency function \(\ell _e(x) = 0\).
Definition 2
The 0-latency simplification \(G_0\) of a given network G is a 0-latency simplified network obtained from G by replacing \(G[V_m]\) with a set of 0-latency edges directly connecting every neighbor of s to every neighbor of t. Moreover, we say that a 0-latency simplified network G is balanced, if \(|n_s - n_t| \le 2n_{-}\) .
Definition 3
We say that a network G(V, E) is (n, p, k)-good, for some integer \(n \le |V|\), some probability \(p \in (0, 1)\), with \(p n = o(n)\), and some constant \(k \ge 1\), if G satisfies that:
-
1.
The maximum degree of G is at most 3n p / 2, i.e., for any \(v \in V\), \(|{\varGamma }(v)| \le 3 n p/2\).
-
2.
G is an expander graph, namely, for any set \(S \subseteq V\), \(|{\varGamma }(S)| \ge \min \{ n p |S|, n \}/2\).
-
3.
The edges of G have random reasonable latency functions distributed according to \({\mathcal {A}} \times {\mathcal {B}}\), and for any constant \(\eta > 0\), \(\mathrm {I\!P}_{b \sim {\mathcal {B}}}[b \le \eta /\ln n] = \omega (1/np)\).
-
4.
If \(k > 1\), we can compute in polynomial time a partitioning of \(V_m\) into k sets \(V_m^1, \ldots , V_m^k\), each of cardinality \(|V_m|/k\), such that all the induced subnetworks \(G[\{ s, t\} \cup V_s \cup V_m^i \cup V_t]\) are (n / k, p, 1)-good, with a possible violation of the maximum degree bound by s and t.
In our text whenever we wish to give emphasis to these particular 4 properties above that good networks posses, we explicitly use the term (n, p, k)-good networks. Our assumption 3 above: \(\mathrm {I\!P}[{\mathcal {B}}\le \frac{\eta }{\log n}]= \omega (\frac{1}{np})\), for constant \(\eta >0\), is equivalent to the assumption in [5, Corollary 6 and Lemmata 7, 8] requiring that for any small constant \(\delta >0\), there are constants \(c> 1\) and \(n_0 > 0\) such that for \(n > n_0\) to hold \(\mathrm {I\!P}[{\mathcal {B}}\le \frac{\delta }{\log n}]\ge \frac{c \log n}{np}\). Our assumption 3 also is in comparison to [5, Lemma 5], that requires that for any small constant \(\delta >0\), there are constants \(c> 1\) and \(n_0 > 0\) such that for \(n > n_0\) to hold \(\mathrm {I\!P}[{\mathcal {B}}\le \frac{\delta }{\log n}]\ge \frac{4}{np}\). It is also helpful for the reader to see our assumption 3 in comparison to [6, Sect. 1.2-1st paragraph] stating that if \(pn \ge c \log n\) then the \(G_{np}\) graph is an \(\left( \alpha = \frac{3}{5}np, \beta =\frac{1}{4} \right) \)-expander. Therefore in the subsequent paragraph in [6, Sect. 2.2-pp. 457] the 2nd bullet becomes \(\mathrm {I\!P}[{\mathcal {B}}\le \frac{\delta }{\log n}] > \frac{20}{3 np}\). Our assumption 2 above: \(\forall S \subseteq V\) it holds \(|{\varGamma } (S)| \ge \frac{1}{2} \min \{np|S|, n\}\) is more relaxed than [5, Lemma 4] stating that for \(G_{np}\) graphs with \(p \ge \frac{c}{\log n}\) whp \(\forall U \subseteq V\) it holds that \(|{\varGamma } (U)| \ge \frac{\mathrm {e}-1 }{\mathrm {e}}\min \{np|U|, n\}\), since \(\frac{\mathrm {e}-1 }{\mathrm {e}} > \frac{1}{2}\). Our assumption 1 above: \(\forall u \in V\) whp it holds \({\varGamma } (u) \le \frac{3}{2}np\) follows from a standard Chernoff bound. Our assumption 4 above: it is easy to see that it holds for \(G_{np}\) graphs due to the fact that each edge appears independently and hence each subset \(V' \subseteq V\) with \(|V'|= n'\) of a \(G_{np}\) graph behaves as \(G_{n'p}\).
If G is a random \({\mathcal {G}}_{n, p}\) network, with n sufficiently large and \(p \ge c k \ln n/n\), for some large enough constant \(c > 1\), then G is an (n, p, k)-good network with high probability (see e.g., [2]), provided that the latency functions satisfy condition (3) above. As for condition (4), a random partitioning of \(V_m\) into k sets of cardinality \(|V_m|/k\) satisfies (4) with high probability. Similarly, the random instances considered in [5] are good with high probability. Also note that the 0-latency simplification of a good network is balanced, due to (1) and (2).
3 The Approximation Scheme and Outline of the Analysis
In this section, we describe the main steps of the approximation scheme (see also Algorithm 1), and give an outline of its analysis. We let \(\varepsilon > 0\) be the approximation guarantee, and assume that \(L(G, r) \ge \varepsilon \). Otherwise, any Nash flow of (G, r) suffices, see step 1 of Algorithm 1.

Algorithm 1 is based on an approximation-preserving reduction of \(\mathrm {BestSubEL}\) for a good network G to \(\mathrm {BestSubEL}\) for the 0-latency simplification \(G_0\) of G. The first step of our approximation-preserving reduction is to show in Lemma 1 in Sect. 4 that the equilibrium latency of the best subnetwork does not increase when we consider the 0-latency simplification \(G_0\) of a network G instead of G itself. Since decreasing the edge latencies (e.g., decreasing \(l'_3(x) = 1\) to \(l_3(x) = 0\) in Fig. 1a) may trigger Braess’s paradox, we need Lemma 1, in Sect. 4, and its careful proof to make sure that zeroing out the latency of the intermediate subnetwork does not cause an abrupt increase in the equilibrium latency.
Next, we focus on the 0-latency simplification \(G_0\) of G (Definition 2), see step 1 in Algorithm 1. We show that if the traffic rate is large enough, i.e., if \(r >(B_{\max }n_{+})/(\varepsilon A_{\min })\), the paradox has a marginal influence on the equilibrium latency and can be approximated in step 1 and 1 of Algorithm 1. In particular, in Sect. 6.3, we first consider the Nash flow f on \((G_0, r)\) computed in strongly polynomial time. Then, using Lemma 5 we “extend” f in poly (|V|) time to a corresponding flow g on the g-used subgraph \(G_g\) of the random instance G. Flow g satisfies the s, t-link capacity constraints imposed by f, while being the minimizer of a potential over all G and, hence, g is a Nash flow on the remaining g-used subgraph \(G_g \subseteq G\) (after discarding all the empty paths of G). Furthermore, if \(L(H^*)= \omega (1)\) then g approximates within \((1+\varepsilon + o(1))\) the \(\mathrm {BestSubEL}\), and if \(L(H^*)= O(1)\) then g approximates within \((1+2\varepsilon + o(1))\) the \(\mathrm {BestSubEL}\) (Remark 2). On the other hand, if \(r \le (B_{\max }n_{+})/(\varepsilon A_{\min })\) we work as step 5 and 6 of Algorithm 1. In Sect. 6.2 we use [10, Theorem 3] restated as Theorem 2 here, and we obtain (within the time bounds of this theorem) a subnetwork \(H_0\) and an \(\varepsilon /6\)-Nash flow f that comprise a good approximate solution to \(\mathrm {BestSubEL}\) for the simplified instance \((G_0, r)\). The next step of our approximation-preserving reduction is to extend f to an approximate solution to \(\mathrm {BestSubEL}\) for the original instance (G, r). The intuition is that due to the expansion and the reasonable latencies of G, any collection of 0-latency edges of \(H_0\) used by f to route flow from \(V_s\) to \(V_t\) can be “simulated” by an appropriate collection of low-latency paths of the intermediate subnetwork \(G_m\) of G. In fact, this observation was the key step in the approach of [5, 36] showing that Braess’s paradox occurs in good networks with high probability. We first prove this claim for a small part of \(H_0\) consisting only of neighbors of s and neighbors of t with approximately the same latency under f (see Lemma 5, the proof draws on ideas from [5, Lemma 5]). Then, using a careful latency-based grouping of the neighbors of s and of the neighbors of t in \(H_0\), we extend this claim to the entire \(H_0\) (see Lemma 6). Thus, we obtain a subnetwork H of G and an \(\varepsilon \)-Nash flow g in H such that \(L(g) \le (1+\varepsilon )L(H^*, r) + \varepsilon \) (step 6).
Theorem 1
Let G(V, E) be an (n, p, k)-good network (Definition 3), with \(k \ge 1\) is a large enough constant.
\(\bullet \) Let \(r \le \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\) be any traffic rate. Let \(H^*\) be the best subnetwork of (G, r). Then, for any \(\varepsilon > 0\), Algorithm 1 computes in time \(n_{+}^{O(r^2 A_{\max }^2 \ln (n_{+})/\varepsilon ^2)} \mathrm {poly}(|V|)\), a flow g and a subnetwork H of G such that with high probability, wrt the random choice of the latency functions, g is an \(\varepsilon \)-Nash flow of (H, r) and has common path latency \(L(g) \le (1+\varepsilon )L(H^*) + \varepsilon \).
\(\bullet \) Let \(r > \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\) be any traffic rate. Then, for any \(\varepsilon > 0\), Algorithm 1 computes in strongly polynomial time a subnetwork H of G such that with high probability, wrt the random choice of the latency functions, g is an \(\varepsilon \)-Nash flow of (H, r) and has common path latency \(L(g) \le (1+2\varepsilon + o(1))L(H^*)\).
By the definition of reasonable latencies, \(A_{\max }\) is a constant. Also, by Lemma 2, r affects the running time only if \(r = O(n_{+}/\varepsilon )\). In fact, previous work on selfish network design assumes that \(r = O(1)\), see e.g., [32]. Thus, if \(r = O(1)\) (or more generally, if \(r = O(\mathrm {poly}(\ln \ln n))\)) and \(pn = O(\mathrm {poly}(\ln n))\), in which case \(n_{+}= O(\mathrm {poly}(\ln n))\), Theorem 1 gives a randomized polynomial-time approximation scheme for \(\mathrm {BestSubEL}\) in good networks. Moreover, the running time is quasipolynomial for traffic rates up to \(O(\mathrm {poly}(\ln n))\) and average degrees up to o(n), i.e., for the entire range of p in [5, 36]. The next sections are devoted to several lemmas and theorems that are useful and combined together in Sects. 6.2 and 6.3 for achieving the corresponding approximation for low and high values of r
4 Network Simplification
We first show that the equilibrium latency of the best subnetwork does not increase when we consider the 0-latency simplification \(G_0\) of a network G instead of G itself. We highlight that the following lemma holds not only for good networks, but also for any network with linear latencies and with the layered structure described in Sect. 2. Lemma 1 will be important in the proof of Lemmata 2-4, since we can work directly in the 0-latency simplification \(G_0\) of G.
Lemma 1
Let G be any network, let \(r > 0\) be any traffic rate, and let H be the best subnetwork of (G, r). Then, there is a subnetwork \(H'\) of the 0-latency simplification of H (and thus, a subnetwork of \(G_0\)) with \(L(H', r) \le L(H, r)\).
Proof
We assume that all the edges of H are used by the equilibrium flow f of (H, r) (otherwise, we can remove all unused edges from H). The proof is constructive, and at the conceptual level, proceeds in two parts.
1st Part Given the equilibrium flow f of the best subnetwork H of G, we construct a simplification \(H_1\) of H that is internally bipartite and has constant latency edges connecting \({\varGamma }(s)\) to \({\varGamma }(t)\). \(H_1\) also admits f as an equilibrium flow, and thus \(L(H_1, r) = L(H, r)\). We also show how to further simplify \(H_1\) so that its intermediate bipartite subnetwork becomes acyclic.
To construct the simplification \(H_1\) of H, we let f be the equilibrium flow of H, and let \(L \equiv L(H, r)\). For each \(u_i \in {\varGamma }(s)\) and \(v_j \in {\varGamma }(t)\), we let \(f_{ij} = \sum _{p = (s, u_i, \ldots , v_j, t)} f_p\) be the flow routed by f from \(u_i\) to \(v_j\). The network \(H_1\) is obtained from H by replacing the intermediate subnetwork of H with a bipartite subnetwork connecting \({\varGamma }(s)\) and \({\varGamma }(t)\) with constant latency edges. More specifically, instead of the intermediate subnetwork of H, for each \(u_i \in {\varGamma }(s)\) and \(v_j \in {\varGamma }(t)\) with \(f_{ij} > 0\), we have an edge \(\{ u_i, v_j \}\) of constant latency \(b_{ij} = L - (a_{\{s, u_i\}} f_{\{s, u_i\}} + b_{\{s, u_i\}}) - (a_{\{v_j, t\}} f_{\{v_j, t\}} + b_{\{v_j, t\}})\) (the corresponding \(a_{ij}\) is set to 0). If \(f_{ij} = 0\), \(u_i\) and \(v_j\) are not connected in \(H_1\). We note that by construction, \(H_1\) admits f as an equilibrium flow, and thus \(L(H_1, r) = L\).
Furthermore, we modify \(H_1\) by deleting some edges from its intermediate subnetwork so that the induced bipartite subgraph \(H_1[{\varGamma }(s) \cup {\varGamma }(t)]\) becomes acyclic. Therefore, in the resulting network, for each \(u_i \in {\varGamma }(s)\) and each \(v_j \in {\varGamma }(t)\), there is at most one \((s, u_i, v_j, t)\) path in \(H_1\). Hence, the resulting network admits a unique equilibrium flow with a unique path decomposition.
To this end, let us assume that there is a cycle \(C = (u_1, v_2, u_2, \ldots , v_k, u_k, v_1, u_1)\) in the intermediate subnetwork \(H_1[{\varGamma }(s) \cup {\varGamma }(t)]\). We let \(e_{k1} = \{u_k, v_1\}\) be the edge of C with the minimum amount of flow in f, and let \(f_{k1}\) be the flow through \(e_{k1}\) (see also Fig. 2). Then, removing \(e_{k1}\), and updating the flows along the remaining edges of C so that \(f'_{ii} = f_{ii} + f_{k1}\), \(1 \le i \le k\), and \(f'_{i(i+1)} = f_{i(i+1)} - f_{k1}\), \(1 \le i \le k - 1\), we “break” the cycle C, by eliminating the flow in \(e_{k1}\), and obtain a new equilibrium flow \(f'\) of the same rate r and with the same latency L as that of f. Applying this procedure repeatedly to all cycles, we end up with an internally bipartite network \(H_1\) with an acyclic intermediate subnetwork that includes constant latency edges only. Moreover, \(H_1\) admits an equilibrium flow f of latency L. This concludes the first part of the proof.

In a we have a cycle \(C = (u_1, v_2, u_2, \ldots , v_k, u_k, v_1, u_1)\) in the intermediate subnetwork \(H_1[{\varGamma }(s) \cup {\varGamma }(t)]\). We assume that \(f_{k1}\) is the minimum amount flow through an edge of C in the equilibrium flow f. In b we have removed the edge \(e_{k1}\), and show the corresponding change in the amount of flow on the remaining edges of C. Since the latency functions of the edges in C are constant, the change in the flow does not affect equilibrium
2nd Part The second part of the proof is to show that we can either remove some of the intermediate edges of \(H_1\) or zero their latencies, and obtain a subnetwork \(H'\) of the 0-latency simplification of H with \(L(H', r) \le L(H, r)\). To this end, we describe a procedure where in each step, we either remove some intermediate edge of \(H_1\) or zero its latency, without increasing the latency of the equilibrium flow.
Let us focus on an edge \(e_{kl} = \{ u_k, v_l \}\) connecting a neighbor \(u_k\) of s to a neighbor \(v_l\) of t. By the first part of the proof, the latency function of \(e_{kl}\) is a constant \(b_{kl} > 0\). Next, we attempt to set the latency of \(e_{kl}\) to \(b'_{kl} = 0\). We have also to change the equilibrium flow f to a new flow \(f'\) that is an equilibrium flow of latency at most L in the modified network with \(b'_{kl} = 0\). We should be careful when changing f to \(f'\), since increasing the flow through \(\{ s, u_k \}\) and \(\{ v_l, t \}\) affects the latency of all \(s-t\) paths going through \(u_k\) and \(v_l\) and may destroy the equilibrium property (or even increase the equilibrium latency). In what follows, we let \(r_{q}\) be the amount of flow moving from an \(s-t\) path \(q = (s, u_i, v_j, t)\) to the path \(q_{kl} = (s, u_k, v_l, t)\) when we change f to \(f'\). We note that \(r_{q}\) may be negative, in which case, \(|r_{q}|\) units of flow actually move from \(q_{kl}\) to q. Thus, \(r_{q}\)’s define a rerouting of f to a new flow \(f'\), with \(f'_{q} = f_{q} - r_{q}\), for any \(s-t\) path q other than \(q_{kl}\), and \(f'_{kl} = f_{kl} + \sum _{q} r_{q}\).
We next show how to compute \(r_q\)’s so that \(f'\) is an equilibrium flow of cost at most L in the modified network (where we attempt to set \(b'_{kl} = 0\)). We let \({\mathcal {P}}= {\mathcal {P}}_{H_1} \setminus \{ q_{kl}\}\) denote the set of all \(s-t\) paths in \(H_1\) other than \(q_{kl}\). We let \({{\varvec{F}}}\) be the \(|{\mathcal {P}}| \times |{\mathcal {P}}|\) matrix, indexed by the paths \(q \in {\mathcal {P}}\), where \({{\varvec{F}}}[q_1, q_2] = \sum _{e \in q_1 \cap q_2} a_e - \sum _{e \in q_1 \cap q_{kl}} a_e\), and let \({{\varvec{r}}}\) be the vector of \(r_q\)’s. Then, the q-th component of \({{\varvec{F}}}{{\varvec{r}}}\) is equal to \(\ell _q(f) - \ell _q(f')\). In the following, we consider two cases depending on whether \({{\varvec{F}}}\) is singular or not.
If matrix \({{\varvec{F}}}\) is non-singular, the linear system \({{\varvec{F}}} {{\varvec{r}}} = \varepsilon \,{{\varvec{1}}}\) has a unique solution \({{\varvec{r}}}_\varepsilon \), for any \(\varepsilon > 0\). Moreover, due to linearity, for any \(\alpha \ge 0\), the unique solution of the system \({{\varvec{F}}} {{\varvec{r}}} = \alpha \,\varepsilon \,{{\varvec{1}}}\) is \(\alpha \,{{\varvec{r}}}_\varepsilon \). Therefore, for an appropriately small \(\varepsilon > 0\), the linear system \( Q_\varepsilon = \{ {{\varvec{F}}} {{\varvec{r}}} = \varepsilon \,{{\varvec{1}}}, f_q - r_q \ge 0\,\ \forall q \in {\mathcal {P}}, f_{kl} + \sum _{q} r_q \ge 0, \ell _{q_{kl}}(f') \le L + b_{kl} - \varepsilon \}\) admits a unique solution \({{\varvec{r}}}\). We keep increasing \(\varepsilon \) until one of the inequalities of \(Q_\varepsilon \) becomes tight. If it first becomes \(r_q = f_q\) for some path \(q = (s, u_i, v_j, t) \in {\mathcal {P}}\), we remove the edge \(\{ u_i, v_j \}\) from \(H_1\) and adjust the constant latency of \(e_{kl}\) so that \(\ell _{q_{kl}}(f') = L - \varepsilon \). Then, the flow \(f'\) is an equilibrium flow of cost \(L - \varepsilon \) for the resulting network, which has one edge less than the original network \(H_1\). If \(\sum _{q} r_q < 0\) and it first becomes \(\sum _{q} r_q = - f_{kl}\), we remove the edge \(e_{kl}\) from \(H_1\). Then, \(f'\) is an equilibrium flow of cost \(L - \varepsilon \) for the resulting network, which again has one edge less than \(H_1\). If \(\sum _{q} r_q > 0\) and it first becomes \(\ell _{q_{kl}}(f') = L + b_{kl} - \varepsilon \), we set the constant latency of the edge \(e_{kl}\) to \(b'_{kl} = 0\). In this case, \(f'\) is an equilibrium flow of cost \(L - \varepsilon \) for the resulting network that has one edge of 0 latency more than the initial network \(H_1\).
If \({{\varvec{F}}}\) is singular, proceeding similarly, we compute \(r_p\)’s so that \(f'\) is an equilibrium flow of cost L in a modified network that includes one edge less than the original network \(H_1\). When \({{\varvec{F}}}\) if singular, the homogeneous linear system \({{\varvec{F}}} {{\varvec{r}}} = \mathbf{0}\) admits a nontrivial solution \({{\varvec{r}}} \ne \mathbf{0}\). Moreover, due to linearity, for any \(\alpha \in \mathrm {I\!R}\), \(\alpha \,{{\varvec{r}}}\) is also a solution to \({{\varvec{F}}} {{\varvec{r}}} = \mathbf{0}\). Therefore, the linear system \(Q_0 = \{ {{\varvec{F}}} {{\varvec{r}}} = \mathbf{0}, f_p - r_p \ge 0\,\ \forall p \in {\mathcal {P}}, f_{kl} + \sum _{p} r_p \ge 0 \}\) admits a solution \({{\varvec{r}}} \ne \mathbf{0}\) that makes at least one of the inequalities tight and has \(\ell _{q_{kl}}(f')\le L+b_{kl}.\) Footnote 1 We recall that the p-th component of \({{\varvec{F}}}{{\varvec{r}}}\) is equal to \(\ell _p(f) - \ell _p(f')\). Therefore, for the flow \(f'\) obtained from the particular solution \({{\varvec{r}}}\) of \(Q_0\), the latency of any path \(p \in {\mathcal {P}}\) is equal to L. If \({{\varvec{r}}}\) is such that \(r_p = f_p\) for some path \(p = (s, u_i, v_j, t) \in {\mathcal {P}}\), we remove the edge \(\{ u_i, v_j \}\) from \(H_1\) and adjust the constant latency of \(e_{kl}\) so that \(\ell _{q_{kl}}(f') = L\). Then, the flow \(f'\) is an equilibrium flow of cost L for the resulting network, which has one edge less than the original network \(H_1\). If \({{\varvec{r}}}\) is such that \(\sum _{p} r_p = - f_{kl}\), we remove the edge \(e_{kl}\) from \(H_1\). Then, \(f'\) is an equilibrium flow of cost L for the resulting network, which again has one edge less than \(H_1\). Moreover, we can show (see Property 1 below) that if \(q_{kl}\) is disjoint from the paths \(q \in {\mathcal {P}}\), the fact that the intermediate network \(H_1\) is acyclic implies that the matrix \({{\varvec{F}}}\) is positive definite, and thus non-singular. Therefore, if \(q_{kl}\) is disjoint from the paths in \({\mathcal {P}}\), the procedure above leads to a decrease in the equilibrium latency, and eventually to setting \(b'_{kl} = 0\). So, by repeatedly applying these steps, we end up with a subnetwork \(H'\) of the 0-latency simplification of H with \(L(H', r) \le L(H, r)\). \(\square \)
Property 1
If the path \(p_{kl}\) is disjoint to the paths \(p \in {\mathcal {P}}\), the matrix \({{\varvec{F}}}\) is positive definite, and thus non-singular.
Proof
We first note that if \(p_{kl}\) is disjoint to all \(p \in {\mathcal {P}}\), then for all \(p_1, p_2 \in {\mathcal {P}}\), \({{\varvec{F}}}[p_1, p_2] = \sum _{e \in p_1 \cap p_2} a_e\). Hence, for all \({{\varvec{x}}} \in \mathrm {I\!R}^{|{\mathcal {P}}|}\), \({{\varvec{x}}}^T {{\varvec{F}}} {{\varvec{x}}} = \sum _{e \in E({\mathcal {P}})} a_e x^2_e \ge 0\), where \(E({\mathcal {P}})\) denotes the set of edges included in the paths of \({\mathcal {P}}\) and \(x_e = \sum _{p: e \in p} x_p\). Since the intermediate network of \(H_1\) is acyclic and any flow in \(H_1\) has a unique path decomposition, if \({{\varvec{x}}}\) has one or more non-zero components, there is at least one edge e adjacent to either s or t such that \(x_e > 0\), and thus \({{\varvec{x}}}^T {{\varvec{F}}} {{\varvec{x}}} > 0\). Otherwise, the difference of the flow defined by \({{\varvec{x}}}\) with the trivial flow defined by \(\mathbf{0}\) would indicate the existence of a cycle in the intermediate subnetwork of \(H_1\). This is a contradiction, since by the first part of the proof, the intermediate part of \(H_1\) is acyclic. \(\square \)
5 Approximating the Best Subnetwork of Simplified Networks
We proceed to show in Theorem 2 how to approximate the \(\mathrm {BestSubEL}\) problem in a balanced 0-latency simplified network \(G_0\) with reasonable latencies. We may always regard \(G_0\) as the 0-latency simplification of a good network G. Before proving this theorem, we first prove two useful lemmas, that is, Lemma 2 about the maximum traffic rate r up to which \(\mathrm {BestSubEL}\) remains interesting, and Lemma 3 about the maximum amount of flow routed on any edge/path in the best subnetwork. The combination of these two lemmas readily yields the proof of Lemma 4, concluding that the best subnetwork of any simplified instance \((G_0, r)\) routes O(1) units of flow on any used edge and on any used path. This is the “missing tile” for finally proving Theorem 2.
Lemma 2
Let \(G_0\) be any 0-latency simplified network, let \(r > 0\), and let \(H^*_0\) be the best subnetwork of \((G_0, r)\). For any \(\varepsilon > 0\), if \(r > \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\), then \(L(G_0, r) \le (1+\varepsilon ) L(H_0^*, r)\).
Proof
We assume that \(r > \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\), let f be a Nash flow of \((G_0, r)\), and consider how f allocates r units of flow to the edges of \(E_s \equiv E_s(G_0)\) and to the edges \(E_t \equiv E_t(G_0)\). For simplicity, we let \(L \equiv L(G_0, r)\) denote the equilibrium latency of \(G_0\), and let \(A_s = \sum _{e \in E_s} 1/a_e\) and \(A_t = \sum _{e \in E_t} 1/a_e\).
Since \(G_0\) is a 0-latency simplified network and f is a Nash flow of \((G_0, r)\), there are \(L_1, L_2 > 0\), with \(L_1 + L_2 = L\), such that all used edges incident to s (resp. to t) have latency \(L_1\) (resp. \(L_2\)) in the Nash flow f. Since we assume arbitrarily small constant \(0<\varepsilon < 1\), then \(r > \frac{B_{\max }n_{+}}{A_{\min }}\), \(L_1, L_2 > B_{\max }\) and all edges in \(E_s \cup E_t\) are used by f.
A useful property is that \(\exists e \in E_s\) with \(a_e f_e \le r/A_s\) and similarly, \(\exists e \in E_t\) with \(a_e f_e \le r/A_t\). To reach a contradiction, assume this is not true: \(\forall e \in E_s\) it holds \(f_e > \frac{r}{a_e A_s}\) and: \(\forall e \in E_t\) it holds \(f_e > \frac{r}{a_e A_t}\). But, this contradicts the total r of the s-links flow, since \(r= \sum _{e \in E_s} f_e > \sum _{e \in E_s} \frac{r}{a_e A_s}= \frac{r}{A_s} \sum _{e \in E_s} \frac{1}{a_e}= \frac{r}{A_s} A_s= r\) (similar is the omitted contradiction for r on the t-links). Since all s-links with positive flow must have equal edge latency \(L_1\), due to this particular s-link e, it follows that \(L_1= a_e f_e + b_e \le r/A_s + b_e \le r/A_s + B_{\max }\). Similarly, since all t-links with positive flow must have equal edge latency \(L_2\), due to this particular t-link e, it follows that \(L_2= a_e f_e + b_e \le r/A_t + b_e \le r/A_t + B_{\max }\). Thus,
On the other hand, consider the best subnetwork \(H_0^*\) with Nash common path latency \(L(H_0^*, r)\) and hence, with cost \(r \times L(H_0^*, r)\). Let OPT the cost of the optimum Footnote 2 flow on \(H_0^*\), which by definition it holds
Note that OPT is at least the cost \(OPT'\) of separately assigning optimally the flow r on s-links (considered as parallel links), plus, the cost of separately assigning the flow r on t-links (considered as parallel links). Because we optimize the same objective \(\sum _{e \in E_s \cup E_t} x_e (a_e \cdot x_e + b_e)\) consisting only of the s, t-links (since the intermediary links have 0-latency) without imposing the flow constraints for the intermediary paths of \(H_0^*\) that connect \({\varGamma }(s)\) to \({\varGamma }(t)\). In symbols:
In turn, \(OPT'\) is at least the cost \(OPT''\) of the optimum flow assignment as above, but, assuming now that each s, t-link e has \(b_e= 0\). This holds because we change the objective \(C'(x)= \sum _{e \in E_s \cup E_t} x_e (a_e \cdot x_e + b_e)\) of \(OPT'\) into the objective \(C''(x)= \sum _{e \in E_s \cup E_t} x_e (a_e \cdot x_e )\) of \(OPT''\), which trivially gives better solution, since \(\forall x\) it holds \(C'(x)\ge C''(x)\). In symbols:
But, this \(OPT''\) is an instance of affine parallel s-links (similarly, t-links) and the optimal load \(\forall e \in E_s\) is \(o_e= \frac{r}{a_eA_s}\) (similarly, for the t-links, \(o_e= \frac{r}{a_eA_t}\)), inducing optimum cost per s-link \(o_e \ell _e (o_e)= \frac{r}{a_eA_s} a_e \frac{r}{a_eA_s} = \frac{r}{a_eA_s} \frac{r}{A_s}\) and cost over all s-links \(\sum _{e \in E_s} \frac{r}{a_eA_s} \frac{r}{A_s}= r \frac{r}{A_s}\). Similarly, we get for the t-links the optimum cost is \(r \frac{r}{A_t}\). Therefore \(OPT'' = r \left( \frac{r}{A_s} + \frac{r}{A_t}\right) \). The above series of inequalities establish that:
which readily implies that
otherwise the Nash flow on \(H_0^*\) would improve the cost of the optimum flow on \(H_0^*\), a contradiction. Now, recall our assumption that \(r > \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\) and note also that \(A_s= \sum _{e \in E_s}\frac{1}{a_e} \le \sum _{e \in E_s}\frac{1}{A_{\min }}= n_s \frac{1}{A_{\min }}\) and similarly that \(A_t \le n_t \frac{1}{A_{\min }}\). Plugging these into the above inequality, we get:
therefore \(2B_{\max }\le \varepsilon L(H_0^*, r)\). Plugging this and (17) into (1) we conclude:
\(\square \)
We proceed to show that in a 0-latency simplified instance \((G_0, r)\), the best subnetwork Nash flow routes \(O(r/n_{+})\) units of flow on any edge and on any \(s-t\) path with high probability (where the probability is with respect to the random choice of the latency function coefficients). Intuitively, we show that in the best subnetwork Nash flow, with high probability, all used edges and all used \(s-t\) paths route a volume of flow not significantly larger than their fair share. We first prove the following technical lemma. Recall that we assume below that \(L(G_0, r) \ge \varepsilon \), because otherwise it becomes trivial to \(\varepsilon \)-approximate the \(\mathrm {BestSubEL}\) problem.
Lemma 3
Given a random instance G and total flow r, let the balanced 0-latency simplified network \(G_0\) and the Nash flow on \((G_0, r)\) with common path latency \(L(G_0, r) \ge \varepsilon > 0\). Then the Nash flow of the best subnetwork \(H^*_0\) of \(G_0\) whpFootnote 3 induces edge load \(\le \frac{24 A_{\max }r}{\delta _{\varepsilon } A_{\min }n_{+}}\) on each edge, with \(\delta _{\varepsilon } > 0\) a constant that depends on \(\varepsilon > 0\) and the reasonable input distribution of Definition 1(3).
Proof
Given a random instance G and flow \(r>0\) construct the the 0-latency simplified network \(G_0\) of G. That is, \(G_0\) consists of the random snapshot of s-links and t-links that are realized in random instance G. Also \(G_0\) contains the construction of the complete bipartite subnetwork that connects with 0-latency links each neighbor of s to all the neighbors of t. We let \(L \equiv L(G_0, r) \ge \varepsilon > 0\) denote the unknown equilibrium latency and g denote a Nash flow of the original instance \((G_0, r)\). We wish to bound L whp as a function of the given total flow r. Since \(G_0\) is a 0-latency simplified network and g is a Nash flow of \((G_0, r)\), there are \(L_1, L_2 > 0\), with \(L_1 + L_2 = L\), such that:
(i) for any edge e incident to s, if \(b_e < L_1\), \(g_e > 0\) and \(a_e g_e + b_e = L_1\), while \(g_e = 0\), otherwise,
(ii) for any edge e incident to t, if \(b_e < L_2\), \(g_e > 0\) and \(a_e g_e + b_e = L_2\), while \(g_e = 0\), otherwise.
Namely, all used edges incident to s (resp. to t) have latency \(L_1\) (resp. \(L_2\)) in the Nash flow g. Wlog., we assume that \(L_1 \ge L_2\), and thus, \(L_1 \ge L/2 \ge \varepsilon /2\).
Inequality (6) below gives the lower bound \(\frac{L}{4A_{\max }}\) on the load of each random s-link e that has the nice random property \(b_e \le \varepsilon /4\). Let e be any edge incident to s with \(b_e \le \varepsilon /4\). By the discussion above, in the Nash flow g of \((G_0, r)\), \(g_e > 0\) and \(a_e g_e + b_e = L_1\). Using that \(L_1 \ge L/2 \ge \varepsilon /2\), we obtain that:
In the sequel, a Chernoff bound (e.g., [13, (7)]) establishes that whp there are at least \(\delta _{\varepsilon } n_{s}/2\) such s-links with the property of \(\ge \frac{L}{4A_{\max }}\) load per link, for an appropriate constant \(\delta _{\varepsilon } > 0\) that depends on \(\varepsilon > 0\) and Definition 1(3). In particular, from Definition 1(3), there exists a constant \(\delta _{\varepsilon } > 0\) such that \(\mathrm {I\!P}[ {\mathcal {B}}\le \varepsilon /4] \ge \delta _{\varepsilon }\) and Chernoff bounds yield:
Therefore the total of accumulated load on these s-links whp is at least \(\delta _{\varepsilon } n_{s}/2 \times \frac{L}{4A_{\max }}\), which, of course is upper bounded by our fixed total flow r, that is, \(\frac{\delta _{\varepsilon } n_{s} L}{8A_{\max }} \le r\). Solving this wrt L, gives:
The last inequality holds because \(G_0\) is balanced, and \(|n_s - n_t| \le 2n_{-}\).
To conclude the proof, observe that in the equilibrium flow f of the best subnetwork \(H^*_0\) of \(G_0\), no used s, t-link e has edge latency greater than the common path latency L of g on \(G_0\), which is bounded as in (8). Therefore, for any used edge e incident to either s or t, it holds:
where the last inequality follows from (8). Moreover, any edge e in the intermediate subnetwork of G has \(f_e \le L/A_{\min }\) due to the flow conservation constraints. \(\square \)
Remark 1
Lemma 2 shows that the interesting case for the paradox is for \(r \le \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\), in this case we combine Lemma 4 and Theorem 2 below and finally proceed to approximate the best subnetwork in Sect. 6.2. On the other hand, if \(r > \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\) we combine the ideas of Lemma 2 and Lemma 3 and proceed to approximate the best subnetwork in Sect. 6.3.
Lemma 4
Given a random instance G and total flow \(0 < r \le \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\), let the balanced 0-latency simplified network \(G_0\) and the Nash flow on \((G_0, r)\) with common path latency \(L(G_0, r) \ge \varepsilon > 0\). Then the Nash flow of the best subnetwork \(H^*_0\) of \(G_0\,\, \mathrm{whp}^{7}\) induces edge load \(\varrho \le \frac{24 A_{\max }B_{\max }}{\delta _{\varepsilon } A_{\min }^2 \varepsilon }\) on each edge, with \(\delta _{\varepsilon } > 0\) a constant that depends on \(\varepsilon > 0\) and the reasonable distribution of Definition 1(3).
Proof
Recall that we assume above that \(L(G_0, r) \ge \varepsilon \), because otherwise it becomes trivial to \(\varepsilon \)-approximate the \(\mathrm {BestSubEL}\) problem. Moreover, by Definition 1(3) of reasonable latency functions, we have that for any constant \(\varepsilon > 0\), there is a constant \(\delta _{\varepsilon } > 0\), such that \(\mathrm {I\!P}[ {\mathcal {B}}\le \varepsilon /4] \ge \delta _{\varepsilon }\). Combining these with Lemmas 2 and 3, we obtain Lemma 4. \(\square \)
So from now on, we can assume, with high probability and wlog., that the Nash flow in the best subnetwork of any simplified instance \((G_0, r)\) routes O(1) units of flow on any used edge and on any used path.
Approximating the Best Subnetwork of Simplified Networks We proceed to derive an approximation scheme for the best subnetwork of any simplified instance \((G_0, r)\).
Theorem 2
Let \(G_0\) be a balanced 0-latency simplified network of a random instance G with reasonable latencies and let the total rate \(0< r \le \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\). Let \(H^*_0\) be the best subnetwork of \((G_0, r)\). Then, for any \(\varepsilon > 0\), we can compute, in time \(n_{+}^{O(A_{\max }^2 r^2 \ln (n_{+})/\varepsilon ^2)}\), a flow f and a subnetwork \(H_0 \subseteq G_0\) consisting of the edges used by f, such that (i) f is an \(\varepsilon \)-Nash flow of \((H_0, r)\), (ii) \(L(f) \le L(H_0^*, r) + \varepsilon /2\), and (iii) there exists a constant \(0 < \varrho \le \frac{24 A_{\max }B_{\max }}{\delta _{\varepsilon } A_{\min }^2 \varepsilon }\), such that \(f_e \le \varrho + \varepsilon \), for all e.
Theorem 2 is a corollary of [10, Theorem 3] (depicted as Theorem 3 below), since in our case the number of different \(s-t\) paths is at most \(n_{+}^2\) and each path consists of 3 edges. So, in [10, Theorem 3], we have \(d_1 = 2\), \(d_2 = 0\), \(\alpha = A_{\max }\), and the error is \(\varepsilon /r\). Moreover, we know from Lemma 4 above that any Nash flow g of \((H_0^*, r)\) routes \(g_e \le \varrho \) units of flow on any edge e, and that in the exhaustive search step, in the proof of [10, Theorem 3], one of the acceptable flows f has \(|g_e - f_e| \le \varepsilon \), for all edges e (see also [10, Lemma 3]). Thus, there is an acceptable flow f with \(f_e \le \varrho + \varepsilon \), for all edges e. In fact, if among all acceptable flows enumerated in the proof of [10, Theorem 3], we keep the acceptable flow f that minimizes the maximum amount flow routed on any edge, we have that \(f_e \le \varrho + \varepsilon \), for all edges e.
Theorem 3
Let \({\mathcal {G}}= (G(V, E), (a_e x + b_e)_{e \in E}, 1)\) be an instance with linear latency functions, let \(\alpha = \max _{e \in E} \{ a_e \}\), and let \(H^B\) be the best subnetwork of G. For some constants \(d_1, d_2\), let \(|{\mathcal {P}}| \le m^{d_1}\) and \(|p| \le \log ^{d_2} m\), for all \(p \in {\mathcal {P}}\). Then, for any \(\varepsilon > 0\), we can compute in time
a flow \({\tilde{f}}\) that is an \(\varepsilon \)-Nash flow on \(G_{{\tilde{f}}}\) and satisfies \(\ell _p({\tilde{f}}) \le L(H^B) + \varepsilon /2\), for all paths p in \(G_{{\tilde{f}}}\) .
6 Extending the Solution to the Good Network
First, in Sect. 6.2, we consider sufficiently low values of r and given a good instance (G, r), we create the 0-latency simplification \(G_0\) of G, and using Theorem 2, we compute a subnetwork \(H_0\) and an \(\varepsilon /6\)-Nash flow f that comprise an approximate solution to \(\mathrm {BestSubEL}\) for \((G_0, r)\). Next, we show how to extend f to an approximate solution to \(\mathrm {BestSubEL}\) for the original instance (G, r). The intuition of this extension is that the 0-latency edges of \(H_0\) used by f to route flow from \(V_s\) to \(V_t\) can be “simulated” by low-latency u-v paths of \(G_m\), for any \(u \in V_s\) and \(v \in V_t\). In Sect. 6.1 and particularly in Lemma 5, we formalize this intuition for the subnetwork of G induced by the neighbors of s with (almost) the same latency \(B_s\) and the neighbors of t with (almost) the same latency \(B_t\), for some \(B_s\), \(B_t\) with \(B_s + B_t \approx L(f)\). We may think of the networks G and \(H_0\) in the Lemma 5 below as some small parts of the original network G and of the actual subnetwork \(H_0\) of \(G_0\). Thus, we obtain Lemma 5, the building block for proving the more general Lemma 6 in Sect. 6.2, that helps to match the neighbors of s of almost equal s-link latency to the corresponding neighbors of t of almost equal t-link latency.
Finally, in Sect. 6.3, we show how to compute in strongly polynomial time a subnetwork \(G' \subseteq G\) that approximates the best subnework.
6.1 Bounding the Latency of the Intermediary Paths for Any \(r>0\)
Lemma 5
Let instance (G, r) with G an (n, p, 1)-good network (Definition 3) with the relaxed degree bound \(n_{+} \le 3 k n p/2\), for some constant \(k > 0\) and let \(r > 0\) be any traffic rate. Assume that \(\exists B_s, B_t \ge 0: \forall e \in E_s \Rightarrow \ell _e(x) = B_s\) and \(\forall e \in E_t \Rightarrow \ell _e(x) = B_t\). Consider the 0-latency simplification \(G_0\) of G. Let any \(H_0 \subseteq G_0\) endowed with a flow f on \((H_0, r)\) that satisfies an edge load bound \(0< \rho ' \le r\), that is, \(\forall e \in E(H_0): f_e> 0 \Rightarrow f_e \le \rho '\).
Then, for any constant \(\epsilon _1> 0\), whp we can compute in time \(\mathrm {poly}(|V|)\) a subnetwork \(G' \subseteq G\) and a flow g on \((G', r)\) with the properties:
-
1.
\(E_s(G') = \{e \in E_s(H_0): f_e> 0 \}\) and \(E_t(G') = \{ e \in E_t(H_0): f_e> 0\}\).
-
2.
\(\forall e \in E_s(G') \cup E_t(G') \Rightarrow g_e = f_e> 0\).
-
3.
\(E_m(G')= \{e \in E_m(G): g_e> 0 \}\).
-
4.
Flow g can be regarded as a Nash flow on \(G'\) for any pair \(u \in V_s(G')\) and \(v \in V_t(G')\) connected by g-used paths.
-
5.
Each g-used path \(q = (s, u, \ldots , v, t)\) in \(G'\) has s-t path latency:
$$\begin{aligned} \ell _q(g)\le & {} B_s+B_t+ 6\epsilon _1 + \rho ' \frac{ 8A_{\max }}{P_b(\epsilon _1)}\left[ \frac{2}{np} \left( 1 + \frac{6 k}{P_b\left( \frac{\epsilon _1}{\ln n}\right) }\right) \right. \\&\left. + \frac{9kp}{2P_b(\epsilon _1)} \right] = B_s+B_t+ 6\epsilon _1 + \rho ' \times o(1) \end{aligned}$$
Proof
We will construct \(G'\) as the subnetwork \(G_g\) containing only the edges that receive positive load by the flow g computed below. Therefore property (3) above will be satisfied by our construction. For each \(e \in E_s\cup E_t\), we set the capacity constraint \(g_e = f_e\). Therefore the flow g satisfies property (1) above by construction, that is, \(E_s(G'), E_t(G')\) contain only the s, t-links that have positive load wrt f.
We compute the extension of g through \(G_m\) as an “almost” Nash flow in the modified version \(G'\) of G, where each edge \(e \in E_s \cup E_t\) has the capacity constraint \(g_e = f_e\), therefore property (2) above is satisfied as well. Also, we set the constant latency \(\ell _e(x) = B_s\), if \(e \in E_s\), and \(\ell _e(x) = B_t\), if \(e \in E_t\). All other edges e of G have no capacity constraint and have (randomly chosen) reasonable latency function \(\ell _e(x)\).
We let g be the flow of rate r that respects the capacities of the edges in \(E_s \cup E_t\), and minimizes \(\mathrm {Pot}(g) = \sum _{e \in E} \int _0^{g_e} \ell _e(x) dx\). Such a flow g can be computed in strongly polynomial time (see e.g., [37]). The subnetwork \(G'\) of G is simply \(G_g\), namely, the subnetwork that includes only the edges that receive positive flow by g. It could have been that g is not a Nash flow of (G, r), due to the capacity constraints on the edges of \(E_s \cup E_t\). However, since g is a minimizer of \(\mathrm {Pot}(g)\), for any \(u \in V_s(G')\) and \(v \in V_t(G')\), and any pair of \(s - t\) paths q, \(q'\) going through u and v, if \(g_q > 0\), thenFootnote 4 \(\ell _q(g) \le \ell _{q'}(g)\). Thus, g can be regarded as a Nash flow for any pair \(u \in V_s(G')\) and \(v \in V_t(G')\) connected by g-used paths, which proves property (4) above.
It remains to prove property (5) above that upper bounds the path latency of any g-used path. Towards this, we adjust the proof of [5, Lemma 5] in Proposition 1 below. To prove this, we let \(p = (s, u, \ldots , v, t)\) be the \(s-t\) path used by g that maximizes \(\ell _p(g)\). We show the existence of a path \(p' = (s, u, \ldots , v, t)\) in G of latency \(\ell _{p'}(g) \le B_s+B_t+ 6\epsilon _1 + \rho ' \times o(1)\). Therefore, since g is a minimizer of \(\mathrm {Pot}(g)\), the latency of the maximum latency g-used path p, and thus the latency of any other g-used \(s-t\) path, is at most \(B_s+B_t+ 6\epsilon _1 + \rho ' \times o(1)\).
Proposition 1
For any s-t path q used by g it holds \(\ell _q(g) \le B_s+B_t+ 6\epsilon _1 + \rho ' \times o(1)\).
Proof
Let \(p = (s, u, \ldots , v, t)\) be the \(s-t\) path used by g that maximizes \(\ell _p(g)\). To show the existence of a path \(p' = (s, u, \ldots , v, t)\) in G of latency \(\ell _{p'}(g) \le B_s+B_t+ 6\epsilon _1 + \rho ' \times o(1)\), we start from \(S_0 = \{ u \}\) and grow a sequence of vertex sets \(S_0 \subseteq S_1 \subseteq \cdots \subseteq S_{i^*}\), stopping when \(|{\varGamma }(S_{i^*})| \ge 3n/5\) for the first time. We use the expansion properties of G, and condition (3), on the distribution of \({\mathcal {B}}\), in the definition of good networks, and show that these sets grow exponentially fast, and thus, \(i^*\le \ln n\), with high probability. Moreover, we show that there are edges of latency \(\epsilon _1 + o(1)\) from \(S_0 = \{ u \}\) to each vertex of \(S_1\), and edges of latency \(\epsilon _1/\ln n + o(1/\ln n)\) from \(S_i\) to each vertex of \(S_{i+1}\), for all \(i = 1, \ldots , i^*-1\). To see this, the intuition is that if among the edges e incident to \(V_s \cup V_t\), we keep only those with \(b_e \le \epsilon _1\), and among all the remaining edges e, we keep only those with \(b_e \le \epsilon _1/\ln n\), then due to condition (3) on the distribution of \({\mathcal {B}}\), a good network G remains an expander. Thus, there is a path of latency at most \(2\epsilon _1 + o(1)\) from u to each vertex of \(S_{i^*}\). Similarly, we start from \(T_0 = \{ v \}\) and grow a sequence of vertex sets \(T_0 \subseteq T_1 \subseteq \cdots \subseteq T_{j^*}\), stopping when \(|{\varGamma }(T_{j^*})| \ge 3n/5\) for the first time. By exactly the same reasoning, we establish the existence of a path of latency at most \(2\epsilon _1 + o(1)\) from each vertex of \(T_{j^*}\) to v. Finally, since \(|{\varGamma }(S_{i^*})| \ge 3n/5\) and \(|{\varGamma }(T_{j^*})| \ge 3n/5\), the neighborhoods of \(S_{i^*}\) and \(T_{j^*}\) contain at least n / 10 vertices in common. With high probability, most of these vertices can be reached from \(S_{i^*}\) and from \(T_{j^*}\) using edges of latency \(\epsilon _1 + o(1)\). Putting everything together, we find a \(u-v\) path (in fact, many of them) of length \(O(\ln n)\) and latency at most \(6\epsilon _1 + o(1) \le 7\epsilon _1\).
For completeness, we next give a detailed proof, by adjusting the arguments in the proof of [5, Lemma 5]. For convenience, for each vertex x, we let \(d_s(x)\) (resp. \(d_t(x)\)) be the latency wrt g of the shortest latency path from s to x (resp. from x to t). Also, for any \(\delta > 0\), we let \(P_b(\delta ) \equiv \mathrm {I\!P}[{\mathcal {B}}\le \delta ]\) denote the probability that the additive term of a reasonable latency is at most \(\delta \). Recall also that by hypothesis, there exists a constant \(\rho ' > 0\), such that for all \(e \in E(H_0)\), \(f_e \le \rho '\). Hence, the total flow through G (and through \(H_0\)) is \(r \le \rho ' n_{+}\).
At the conceptual level, the proof proceeds as explained above. We start with \(S_0 = \{ u \}\). By hypothesis, the flow entering u is at most \(\rho '\). By the expansion property of good networks and by Chernoff bounds,Footnote 5 with high probability, there are at least \(P_b(\epsilon _1) n p/4\) edges e adjacent to u with \(b_e \le \epsilon _1\). At most half of these edges have flow greater than \(\frac{8 \rho '}{P_b(\epsilon _1) n p}\), thus there are at least \(P_b(\epsilon _1) n p/8\) edges adjacent to u with latency, wrt g, less than \(\frac{8 A_{\max }\rho '}{P_b(\epsilon _1) n p} + \epsilon _1\). We now let \(d_1 = B_s + \frac{8 A_{\max }\rho '}{P_b(\epsilon _1) n p} + \epsilon _1\) and \(S_1 = \{x \in V : d_s(x) \le d_1\}\). By the discussion above, \(|S_1| \ge P_b(\epsilon _1) n p/8\).
We now inductively define a sequence of vertex sets \(S_i\) and upper bounds \(d_i\) on the latency of the vertices in \(S_i\) from s, such that \(S_i \subseteq S_{i+1}\) and \(d_i < d_{i+1}\). This sequence stops the first time that \(|{\varGamma }(S_i)| \ge 3n/5\). We inductively assume that the vertex set \(S_i\) and the upper bound \(d_i\) on the latency of the vertices in \(S_i\) are defined, and that \(|{\varGamma }(S_i)| < 3n/5\). By the expansion property of good networks \(|{\varGamma }(S_i)\setminus S_i| \ge n p |S_i|/3\), for sufficiently large n. Thus, with probability at least \(1-\mathrm {e}^{P_b(\epsilon _1/\ln n) n p |S_i|/24}\), there are at least \(P_b(\frac{\epsilon _1}{\ln n})np|S_i|/6\) vertices outside \(S_i\) that are connected to a vertex in \(S_i\) by an edge e with \(b_e \le \epsilon _1/\ln n\). Let \(S_i'\) be the set of such vertices, and let \(E_i\) be the set of edges that for each vertex \(v \in S'_i\), includes a unique edge \(e \in E_i\) with \(b_e \le \epsilon _1/\ln n\) connecting v to a vertex in \(S_i\). Since the flow g may be assumed to be acyclic, a volume \(r \le \rho 'n_{+}\) of flow is routed through the cut \((S_i, V \setminus S_i)\). Then, at most half of the edges in \(E_i\) have flow greater than \(2\rho ' n_{+}/|S_i'|\). Consequently, at least half of the vertices \(v \in S_i'\) have latency from s:
Thus, we define the next latency upper bound \(d_{i+1}\) in the sequence as:
and we let \(S_{i+1} = \{x \in V(G)|d_s(x) \le d_{i+1}\}\). By the discussion above, and using the inductive definition of \(S_i\)’s, we obtain that:
We recall that \(i^*\) is the first index i such that \(|{\varGamma }(S_i)|\ge 3n/5\). Then, the inequality above implies that:
Using that \(pn \ge \ln n\) and that \(P_b(\epsilon _1/\ln n)np = \omega (1)\), the inequality above implies that \(i^*\le \ln n\), for sufficiently large n.
Therefore, we obtain an upper bound on the latency from s of any vertex in \(S_{i^*}\):
For the penultimate inequality, we use that \(P_b(\epsilon _1/\ln n)np = \omega (1)\), which implies that \(1+P_b(\epsilon _1/\ln n)np/12 \ge 2\), for n sufficiently large. For the last inequality, we use that \(n_{+}\le 3 k n p/2\), for some constant \(k > 0\), by hypothesis.
Moreover, we observe that probability that the above construction fails is at most:
Therefore, the construction above succeeds with high probability.
Similarly, we start from \(T_0 = \{ v \}\), and inductively define a sequence of vertex sets \(T_0 \subseteq T_1 \subseteq \cdots \subseteq T_{j^*}\), and a sequence of upper bounds \(d'_0< d'_1< \cdots < d'_{j^*}\) on the latency from t of the vertices in each \(T_j\). We let \(T_j = \{ x \in V(G)|d_t(x) \le d'_{j}\}\). The sequence stops as soon as \(|{\varGamma }(T_j)| \ge 3n/5\) for the first time. Namely, \(j^*\) is the first index with \(|{\varGamma }(T_{j^*})|\ge 3n/5\). Using exactly the same arguments, we can show that with high probability, we have that \(j^*\le \ln n\), and that:
Wlog., we assume that \(S_{i^*}\cap T_{j^*}=\emptyset \). Since \(|{\varGamma } (S_{i^*})|+|{\varGamma } (T_{j^*})|\ge 6n/5\), there are at least n / 10 edge disjoint paths of length at most 2 between \(S_{i^*}\) and \(T_{j^*}\). Furthermore, by Chernoff bounds, with high probability, there are at least \(P_b(\epsilon _1)^2 n/12\) such paths with both edges e on the path having \(b_e \le \epsilon _1\). At most half of these paths have flow more than \(2\frac{12\rho 'n_{+}}{P_b(\epsilon _1)^2n}\) and thus there is a path from a vertex of \(S_{i^*}\) to a vertex of \(T_{j^*}\) that costs at most \( 2\epsilon _1+2A_{\max }\frac{24\rho 'n_{+}}{P_b(\epsilon _1)^2n} \).
Putting everything together, we have that there is a path \(p'\) that starts from s, moves to u, goes through vertices of the sequence \(S_1, \ldots , S_{i^*}\), proceeds to a vertex of \({\varGamma }(S_{i^*}) \cap {\varGamma }(T_{j^*})\), and from there, continues through vertices of the sequence \(T_{j^*}, \ldots , T_1\), until finally reaches v, and then t. The latency of this path is:
We recall that since the flow g is a minimizer of \(\mathrm {Pot}(g)\), for any g-used path \(q = (s, u, \ldots , v, t)\), \(\ell _q(g) \le \ell _{p'}(g)\). Thus we obtain that any g-used path \(q = (s, u, \ldots , v, t)\) has latency
In the above asymptotic expressions we used the assumption of Lemma 5 that \(n_{+}/n = \max \{n_s, n_t\}/n \le 3k p/2\), for constant \(k > 0\). We also used in the Definition 3 of good networks the condition (3) that \(P_b(\epsilon _1/\ln n) n p = \omega (1)\). We also used in the Definition 1 of reasonable latency coefficients the condition (3) that for any constant \(\epsilon _1> 0\) there exists a constant \(\delta _{\epsilon _1}> 0\) such that \(P_b(\epsilon _1)\ge \delta _{\epsilon _1}\). Finally, we used in the Definition 3 of good networks that \(p n = o(n) \Rightarrow p = o(1)\) and \(pn = {\varOmega } (\log n)\). \(\square \)
We conclude that the flow g satisfies property (5) of Lemma 5 by Proposition 1 proved above in (10). \(\square \)
Corollary 1
If \(\rho ' = O(1)\) in (10) then \(\forall \epsilon _1> 0 \Rightarrow \ell _q(g) \le B_s + B_t+ 7\epsilon _1\), for each g-used path in (10). Thus, g is an \(7\epsilon _1\)-NE, \(\forall \epsilon _1> 0\).
6.2 Approximating the Best Subnetwork When \(r \le \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\)
Grouping the Neighbors of s and t Let us now consider the entire random instance G and the best subnetwork \(H_0^*\) of \(G_0\) (recall, \(G_0\) is the 0-latency simplification of G, see Definition 2) and \(f^*\) the corresponding NE flow on \(H_0^*\). A subtle issue of Lemma 5 is that it applies only to subsets of s-links in \(E_s(H_0^*)\) and t-links in \(E_t(H_0^*)\) that have (almost) the same s, t-link latency (recall the role of \(B_s, B_t\) in Lemma 5) under the given NE flow \(f^*\) in \(H_0^*\). But, unlike \(G_0\), now \(H_0^*\) need not be internally complete bipartite, therefore may exist neighbors of s (resp. t) connected to disjoint subsets of \(V_t\) (resp. of \(V_s\)) in \(H_0^*\), and thus have quite different s, t-link latency. Hence, to apply Lemma 5, we partition the neighbors of s and the neighbors of t into an at most a constant number of classes \(V_s^i\) and \(V_t^j\) according to their latency. For convenience, we let \(\epsilon _2 = \varepsilon /6\) and apply Theorem 2. By Theorem 2 there is an acceptable flow f, determined by exhaustive search within the time bound of this theorem, and a network \(H_0\) containing only the f-used paths, which is an \(\epsilon _2\)-Nash flow on \(H_0\) and induces a path latency \(L \equiv L_{H_0}(f)\). By Theorem 2, applied with error \(\epsilon _2 = \varepsilon /6\), there exists a constant \(\varrho \) such that \(0 < \varrho \le \frac{24 A_{\max }B_{\max }}{\delta _{\varepsilon } A_{\min }^2 \varepsilon }\) (where this bound on \(\varrho \) holds by Lemma 4), where for all \(e \in E(H_0)\), \(0 < f_e \le \varrho +\epsilon _2\). The highest latency wrt f of an s-link, plus the highest latency of an t-link upper bounds the latency of any s-t path used by f in \(H_0\). Thus, using the error \(\epsilon _2 = \varepsilon /6\) above, we can define in (11) the following constants \(\kappa , \mathcal{L}, k\) that will be useful in the sequel:
Note that constant \({{{\mathcal {L}}}}\) in (11) above is independent of the particular value that r takes and independent of \(f^*, f\). Recall (11) and partition the interval \([0, {{{\mathcal {L}}}}]\) of the possible s, t-link latency values into the constant number \(\kappa = {\left\lceil \mathcal{L}/\epsilon _2\right\rceil }= {\left\lceil 6{{{\mathcal {L}}}}/\varepsilon \right\rceil }\) of subintervals, where the i-th subinterval is \(I^i = (i\epsilon _2, (i+1) \epsilon _2]\), \(i = 0, \ldots , \kappa -1\). Once more \(\kappa \) is independent of the particular value that r takes and independent of \(f^*, f\). We partition the vertices of \(V_s\) (resp. of \(V_t\)) that receive positive flow by f into the same constant number \(\kappa \) of classes \(V_s^i\) (resp. \(V_t^i\)), \(i = 0, \ldots , \kappa -1\). Precisely, a vertex \(x \in V_s\) (resp. \(x \in V_t\)), connected to s (resp. to t) by the edge \(e_x = \{ s, x \}\) (resp. \(e_x = \{ x, t \}\)), is in the class \(V_s^i\) (resp. in the class \(V_t^i\)), if \(\ell _{e_x}(f_{e_x}) \in I_i\). If a vertex \(x \in V_s\) (resp. \(x \in V_t\)) does not receive any flow from f, x is removed from G and does not belong to any class. Hence, from now on, we assume that all neighbors of s and t receive positive flow from f, and that \(V_s^0, \ldots V_s^{\kappa -1}\) (resp. \(V_t^0, \ldots , V_t^{\kappa -1}\)) is a partitioning of \(V_s\) (resp. \(V_t\)). In exactly the same way, we partition the edges of \(E_s\) (resp. of \(E_t\)) used by f into the same constant number \(\kappa \) of classes \(E_s^i\) (resp. \(E_t^i\)), \(i = 0, \ldots , \kappa -1\).
To find out which parts of \(H_0\) will be connected through the intermediate subnetwork of G, using the construction of Lemma 5, we further classify the vertices of \(V_s^i\) and \(V_t^j\) based on the neighbors of t and on the neighbors of s, respectively, to which they are connected by f-used edges in the subnetwork \(H_0\). In particular, a vertex \(u \in V_s^i\) belongs to the classes \(V_s^{(i, j)}\), for all j, \(0 \le j \le \kappa -1\), such that there is a vertex \(v \in V_t^j\) with \(f_{\{u, v\}} > 0\). Similarly, a vertex \(v \in V_t^j\) belongs to the classes \(V_t^{(i, j)}\), for all i, \(0 \le i \le \kappa -1\), such that there is a vertex \(u \in V_s^i\) with \(f_{\{u, v\}} > 0\). A vertex \(u \in V_s^i\) (resp. \(v \in V_t^j\)) may belong to many different classes \(V_s^{(i, j)}\) (resp. to \(V_t^{(i, j)}\)), and that the class \(V_s^{(i, j)}\) is non-empty iff the class \(V_t^{(i, j)}\) is non-empty. We let \(k \le \kappa ^2\) in (11) to be the number of pairs (i, j) for which \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\) are non-empty. We note that k is bounded above by constant \(\kappa ^2\) that does not depend on \(|V|, r, f, f^*\). In particular, the flow f at hand determines k which, by virtue of Theorem 2, the f at hand is the best outcome flow via deterministic exhaustive search over all acceptable flows. We let \(E_s^{(i, j)}\) be the set of edges connecting s to the vertices in \(V_s^{(i, j)}\) and \(E_t^{(i, j)}\) be the set of edges connecting t to the vertices in \(V_t^{(i, j)}\). We conclude that, when f is handed, the above construction of all the corresponding subsets takes time bounded by \(\kappa ^2\) in (11).
Building the Intermediate Subnetworks of G The last step is to replace the 0-latency simplified parts connecting the vertices of each pair of classes \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\) in \(H_0\) with a subnetwork of \(G_m\). We partition, as in condition (4) of Definition 3 of good networks, the set \(V_m\) of intermediate vertices of G into k subsets, each of cardinality \(|V_m|/k\), and associate a different such subset \(V_m^{(i, j)}\) with any pair of non-empty classes \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\). For each pair (i, j) for which the classes \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\) are non-empty, we consider the induced subnetwork \(G^{(i, j)} \equiv G[\{s, t\} \cup V_s^{(i, j)} \cup V_m^{(i, j)} \cup V_t^{(i, j)}]\), which is an (n / k, p, 1)-good network, since G is an (n, p, k)-good network. Therefore, we can apply Lemma 5 to \(G^{(i, j)}\), with \(H_0^{(i, j)} \equiv H_0[\{s, t\} \cup V_s^{(i, j)} \cup V_t^{(i, j)}]\) in the role of \(H_0\), the restriction \(f^{(i, j)}\) of f to \(H_0^{(i, j)}\) in the role of the flow f, and since \(\rho ' = \varrho +\epsilon _2= O(1)\) we can apply, in particular, Corollary 1. Moreover, we let \(B_s^{(i,j)} = \max _{e\in E_s^{(i, j)}} \ell _e(f_e)\) and \(B_t^{(i,j)}= \max _{e\in E_t^{(i, j)}}\ell _e(f_e)\) correspond to \(B_s\) and \(B_t\), and introduce constant latencies \(\ell '_e(x) = B_s^{(i,j)}\) for all \(e \in E_s^{(i, j)}\) and \(\ell '_e(x) = B_t^{(i,j)}\) for all \(e \in E_t^{(i, j)}\), as required by Lemma 5. Thus, we obtain, with high probability, a subnetwork \(H^{(i, j)}\) of \(G^{(i, j)}\) and a flow \(g^{(i, j)}\) that routes as much flow as \(f^{(i, j)}\) on all edges of \(E_s^{(i, j)} \cup E_t^{(i, j)}\), and satisfies the conclusion of Lemma 5, if we keep in \(H^{(i, j)}\) the constant latencies \(\ell '_e(x)\) for all \(e \in E_s^{(i, j)} \cup E_t^{(i, j)}\).
The final outcome is the union of the subnetworks \(H^{(i, j)}\), denoted H (H has the latency functions of the original instance G), and the union of the flows \(g^{(i, j)}\), denoted g, where the union is taken over all k pairs (i, j) for which the classes \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\) are non-empty. By construction, all edges of H are used by g. Using the properties of the construction above, we can show that if \(\epsilon _1 = \varepsilon /42\) and \(\epsilon _2 = \varepsilon /6\), the flow g is an \(\varepsilon \)-Nash flow of (H, r), and satisfies \(L_{H}(g) \le L_{H_0}(f) + \varepsilon /2\). Thus, we obtain:
Lemma 6
Fix any \(\varepsilon > 0\) and set constant \(k = \kappa ^2\) as in (11). Let (G, r) with G a (n, p, k)-good network (Definition 3) and arbitrary \(r: 0< r \le \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\). Consider by Theorem 2 an acceptable \((\varepsilon /6)\)-Nash flow f and the subnetwork \(H_0 \subseteq G_0\) used by f which satisfies: \(\forall e \in E(H_0)\Rightarrow 0 < f_e \le \varrho + \varepsilon /6\), with constant \(0< \varrho \le \frac{24 A_{\max }B_{\max }}{\delta _{\varepsilon } A_{\min }^2 \varepsilon }\). Then whpFootnote 6 we can compute in \(\mathrm {poly}(|V|)\) time a subnetwork \(H \subseteq G\) and an \(\varepsilon \)-Nash flow g of (H, r) with \(L_{H}(g) \le L_{H_0}(f) + \varepsilon /2\).
Proof
We consider the subnetwork H (with the original latency functions of G), computed as the union of subnetworks \(H^{(i, j)}\), and the flow g, computed as the union of the flows \(g^{(i, j)}\), where the union is taken over all k pairs (i, j) for which the classes \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\) are non-empty. We recall that by construction, all edges of H are used by g. We show that if \(\epsilon _1 = \varepsilon /42\) and \(\epsilon _2 = \varepsilon /6\), the flow g is an \(\varepsilon \)-Nash flow of (H, r), and satisfies \(L_{H}(g) \le L_{H_0}(f) + \varepsilon /2\). We stress that the edge and path latencies here are calculated with respect to the original latency functions of G and under the edge congestion induced by the flow g (or the flow f).
For convenience, we let \(B^{(i, j)} = B_s^{(i, j)} + B_t^{(i, j)}\) for any pair of non-empty classes \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\). Since the difference in the latency of any edges in the same group is at most \(\epsilon _2\), we obtain that for any edge \(e \in E_s^{(i, j)}\), \(B_s^{(i, j)} - \epsilon _2 \le \ell _e(f_e) \le B_s^{(i, j)}\), and similarly, that for any edge \(e \in E_t^{(i, j)}\), \(B_t^{(i, j)} - \epsilon _2 \le \ell _e(f_e) \le B_t^{(i, j)}\). Therefore, since \(H_0\) is a 0-latency simplified network, and since by hypothesis, all the edges of \(H_0\) are used by f, for any pair of non-empty classes \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\), and for any \(s-t\) path p going through a vertex of \(V_s^{(i, j)}\) and a vertex of \(V_t^{(i, j)}\),
Moreover, since f is an \(\epsilon _2\)-Nash flow of \((H_0, r)\), for any \(s-t\) path \(p \in {\mathcal {P}}_{H_0}\),
Combining the two inequalities above, we obtain that for any pair of non-empty classes \(V_s^{(i, j)}\) and \(V_t^{(i, j)}\),
As for the flow g, by construction, we have that \(g_e = f_e\) for all edges \(e \in E_s \cup E_t\). Therefore, for any edge \(e \in E_s^{(i, j)}\), \(B_s^{(i, j)} - \epsilon _2 \le \ell _e(g_e) \le B_s^{(i, j)}\), and similarly, for any edge \(e \in E_t^{(i, j)}\), \(B_t^{(i, j)} - \epsilon _2 \le \ell _e(g_e) \le B_t^{(i, j)}\). Thus, by Lemma 5 and its Corollary 1, and since all the edges of any subnetwork \(H^{(i, j)}\) are used by g, for any \(s-t\) path p in the subnetwork \(H^{(i, j)}\), \(B^{(i, j)} - 2\epsilon _2 \le \ell _p(g) \le B^{(i, j)} + 7\epsilon _1\). Using (12), we obtain that for any subnetwork \(H^{(i, j)}\) and any \(s-t\) path p of \(H^{(i, j)}\),
Furthermore, we recall that the subnetworks \(H^{(i, j)}\) only have in common the vertices s and t, and possibly some vertices of \(V_s \cup V_t\) and some edges of \(E_s \cup E_t\). They have neither any other vertices in common, nor any edges connecting vertices in the intermediate parts of different subnetworks \(H^{(i, j)}\) and \(H^{(i', j')}\). Hence, any \(s-t\) path p of H passes through a single subnetwork \(H^{(i, j)}\). Therefore, and since by construction, all the edges and the paths of H are used by g, (13) holds for any \(s-t\) path p of H.
Thus, we have shown that g is a \((5\epsilon _2 + 7\epsilon _1)\)-Nash flow of (H, r), and that \(L_H(g) \le L_{H_0}(f) + 2\epsilon _2 + 7\epsilon _1\). Using \(\epsilon _2 = \varepsilon /6\) and \(\epsilon _1 = \varepsilon /42\), we obtain the performance guarantees of g as stated in Lemma 6. \(\square \)
6.3 Approximating the Best Subnetwork When \(r > \frac{B_{\max }n_{+}}{A_{\min }\varepsilon }\)
In Lemma 2 we have proved that: for an arbitrary net G at hand, if \(G_0\) denotes the 0-latency simplified network (Definition 2) of G the Nash flow f can be computed in strongly polynomial time (see e.g., [37]) on \((G_0, r)\) and there are \(L_1, L_2 > 0\), with \(L_1 + L_2 = L\), such that all used edges incident to s (resp. to t) have latency \(L_1\) (resp. \(L_2\)) in the Nash flow f. Since \(r > \frac{B_{\max }n_{+}}{A_{\min }}\) then \(L_1, L_2 > B_{\max }\) and all edges in \(E_s \cup E_t\) are used by f. In particular, recall here (1) that the common path latency of the NE of \(G_0\) is
Also, in Lemma 2 we have proved that the common edge latency \(L_1\) of loaded s-links is \(L_1 \le \frac{r}{A_s} + B_{\max }\). From this, we derive that the upper bound \(\rho '\) used in the property (5) of Lemma 5 on the load of any s-link e, satisfies:
which bounds the flow traversed by any loaded path departing from a \(u \in {\varGamma }(G_0)\) and arriving at a \(u \in {\varGamma }(G_0)\). By the NE flow f on \((G_0, r)\) all the loaded s-links have equal latency \(L_1\) and all the loaded t-links have equal latency \(L_2\), therefore we can plug f into Lemma 5 and compute in poly |V| time a flow g and a subnetwork \(G' \subseteq G\) that satisfies properties (1-5) of Lemma 5. In particular, g is a NE on the subnetwork \(G'= G_g\) that contains all g-used paths, where each g-used path has latency as in property (5) of Lemma 5, that is, for any constant \(\epsilon _1> 0\):
where above we have plugged the \(\rho '\) in (15). The expression in (16) will be useful bellow, when divided by the common path latency \(L(H^*, r)\) of the best subnetwork \(H^*\subseteq G\) and derive the approximation ratio of our algorithm 1. Towards this, in Lemma 2 we have proved that the best subnetwork \(H^*_0 \subseteq G\) of the 0-latency simplification of our initial graph G has a common path latency \(L(H_0^*, r)\) at least:
In particular, by virtue of our Lemma 1, the expression in (17) is a lower bound of the common path latency \(L(H^*, r)\) of the best subnetwork of the original G. We should stress here that we assume that this expression is \(>> 1\), since we refer to very high values of total rate r that loads all s, t-links thus inducing high common path latency. Otherwise, if the common path latency is O(1), our previous analysis in Sect. 6.2 applies as is. We conclude that, if we consider the ratio of (16) and (17), then for any positive constant \(\epsilon _1 >0\), our approximation ratio for computing an \(\varepsilon \)-NE is at most:
To derive (18), we have used the following bounds. From the 1st line to 2nd line we used that: \(\frac{2 B_{\max }}{\left( \frac{r}{A_s} + \frac{r}{A_t}\right) } \le \varepsilon \), proved in (5). From the 2nd line to 3rd line we used that: \(\frac{r}{A_s} <\left( \frac{r}{A_s} + \frac{r}{A_t}\right) \) and that \(\left( \frac{r}{A_s} + \frac{r}{A_t}\right)>> 1\) that we assumed in (17) because we study the case of high values of r. From the 3rd line to 4th line, we recall the bound used in 1st to 2nd line, to obtain: \(\frac{ B_{\max }}{\left( \frac{r}{A_s} + \frac{r}{A_t}\right) } \le \varepsilon /2\). From the 4th line to 5th line we used that: \(\frac{1}{A_{\min }}= {\varOmega }(1)\), see assumption (1) of the reasonable coefficients in Definition 1.
Remark 2
We can also relax the assumption that \(\left( \frac{r}{A_s} + \frac{r}{A_t}\right)>> 1\) and obtain a slightly weaker approximation ratio than in (18). In particular, recall \(\frac{2 B_{\max }}{\left( \frac{r}{A_s} + \frac{r}{A_t}\right) } \le \varepsilon \), proved in (5) that yields in the 2nd line of (18) that term \(\frac{6 \epsilon _1}{\left( \frac{r}{A_s} + \frac{r}{A_t}\right) } \le \frac{3 \epsilon _1 \varepsilon }{B_{\max }}< \varepsilon , \forall \epsilon _1 < \frac{B_{\max }}{3}\). Thus, in a scenario that \(\left( \frac{r}{A_s} + \frac{r}{A_t}\right) = {\varOmega } (1)\) then \(\forall \epsilon _1: 0< \epsilon _1 < \frac{B_{\max }}{3}\) we get \(L(G', r) \le (1+ 2 \varepsilon + o(1) )L(H^*, r)\).
7 Open Problem
Once more we highlight that the reduction itself runs in polynomial time. The time consuming step is the application of [10, Theorem 3] to the 0-latency simplified network. Since such networks have only polynomially many (and very short) \(s-t\) paths, they escape the hardness result of [33]. The (improved) approximability of the best subnetwork for 0-latency simplified networks is an intriguing open problem arising from our work.
Notes
If the direction of a solution \(r_0\) gives increase to \(\ell _{q_{kl}}(f')\) then, because of linearity, the direction of \(-r_0\) decreases it. So we can assume that we can hit one of the constraints and have \(\ell _{q_{kl}}(f')\le L+b_{kl}\) (e.g. by choosing the direction that decreases \(\ell _{q_{kl}}(f')\)). Note that in both directions of \(r_0\) and \(-r_0\) we are bounded by one of the constraints because, in any direction, either some \(r_{q}\) would be increasing and \(f_q-r_q\ge 0\) will be bounding us, or all \(r_q\)’s would be decreasing and \(f_{kl}+\sum _qr_q\ge 0\) will be bounding us.
Recall Sect. 1, paragraph Previous Work, that for the optimum cost, we compute the flow X that minimizes the total latency cost \(C(X)= \sum _{e \in E(H_0^*)} x_e (a_e \cdot x_e + b_e)\) incurred by all users on network \(H_0^*\) wrt flow X.
With probability at least \(1 - \mathrm {e}^{-\delta _{\varepsilon } n_{-}/8}\).
This holds because the flow travelling from u to v inside G faces no capacities. For this flow and the edges used by it in G, a new minimization problem similar to the one above could be defined. The objective would be the same and the flows other the one going from u to v would be handled as constants. A solution to this problem could be used to minimize the initial objective and that’s why the initial problem returns a solution that solves also the new problem, which in turn has an equilibrium flow as a solution.
We repeatedly use the following form of the Chernoff bound (see e.g., [13]): Let \(X_1, \ldots , X_k\) be random variables independently distributed in \(\{0, 1\}\), and let \(X = \sum _{i=1}^k X_i\). Then, for all \(\epsilon \in (0, 1)\), \(\mathrm {I\!P}[X < (1-\epsilon )\mathrm {I\!E}[X]] \le \mathrm {e}^{-\epsilon ^2\,\mathrm {I\!E}[X] / 2}\), where \(\mathrm {e}\) is the basis of natural logarithms.
wrt. the random choice of the latency functions of G.
References
Althöfer, I.: On sparse approximations to randomized strategies and convex combinations. Linear Algebra Appl. 99, 339–355 (1994)
Bollobás, B.: Random Graphs, 2nd Edition Cambridge Studies in Advanced Mathematics, vol. 3. Cambridge University Press, Cambridge (2001)
Braess, D.: Über ein paradox aus der Verkehrsplanung. Unternehmensforschung 12, 258–268 (1968)
Cheeseman, P., Kanefsky, B., Taylor, W.: Where the really hard problems are. IJCAI 1, 331–337 (1991)
Chung, F., Young, S.J.: Braess’s paradox in large sparse graphs. In: Proceedings of the 6th Workshop on Internet and Network Economics (WINE ’10), LNCS, vol. 6484, pp. 194–208 (2010)
Chung, F., Young, S.J., Zhao, W.: Braess’s paradox in expanders. Random Struct. Algorithms 41(4), 451–468 (2012)
Cole, R., Dodis, Y., Roughgarden, T.: How much can taxes help selfish routing? J. Comput. Syst. Sci. 72(3), 444–467 (2006)
Duffin, R.J.: Topology of serries-parallel networks. J. Math. Anal. Appl. 10, 303–318 (1965)
Erdos, P., Renyi, A.: On the evolution of random graphs. Publ. Math. Inst. Hung. Acad. Sci. 5, 17–61 (1960)
Fotakis, D., Kaporis, A.C., Spirakis, P.G.: Efficient methods for selfish network design. Theor. Comput. Sci. 448, 9–20 (2012)
Franco, J.: Results related to threshold phenomena research in satisfiability: lower bounds. Theor. Comput. Sci. 265, 147–157 (2001)
Friedman, E.: Genericity and congestion control in selfish routing. In: 43rd IEEE Conference on Decision and Control, pp. 4667–4672 (2004)
Hagerup, T., Rüb, C.: A guided tour of Chernoff bounds. Inf. Process. Lett. 33(6), 305–308 (1990)
Johnson, D.: The NP-completeness column: an ongoing guide. J. Algorithms 5(2), 284–299 (1984)
Johnson, D., Aragon, C., McGeoch, L., Shevon, C.: Optimization by simulated annealing: an experimental evaluation. Oper. Res. 37(6), 865–892 (1989)
Karp, R.: Combinatorics, complexity, and randomness (turing award lecture). Commun. ACM 29(2), 98–109 (1989)
Kelly, F.: The Princeton companion to mathematics. In: Gowers, T., Green, J., Leader, I. (eds.) The Mathematics of Traffic in Networks. Princeton University Press, Princeton (2008)
Kirkpatrick, S., Selman, B.: Critical behavior in the satisfiability of random Boolean expressions. Science 264, 1297–1301 (1994)
Lin, H.C., Roughgarden, T., Tardos, É., Walkover, A.: Stronger bounds on Braess’s paradox and the maximum latency of selfish routing. SIAM J. Discrete Math. 25(4), 1667–1686 (2011)
Lipton, R.J., Markakis, E., Mehta, A.: Playing large games using simple strategies. In: Proceedings of the 4th ACM Conference on Electronic Commerce (EC ’03), pp. 36–41 (2003)
Lipton, R.J., Young, N.E.: Simple strategies for large zero-sum games with applications to complexity theory. In: Proceedings of the 26th ACM symposium on theory of computing (STOC ’94), pp. 734–740 (1994)
Mézard, M., Parisi, G., Zecchina, R.: Analytic and algorithmic solution of random satisfiability problems. Science 297, 812–815 (2002)
Mitchell, D., Selman, B., Levesque, H.: Hard and easy distribution of SAT problems. In: Proceeings of 10th National Conference on Artificial Intelligence (AAAI ’92), pp. 459–465
Milchtaich, I.: Network topology and the efficiency of equilibrium. Games Econ. Behav. 57, 321–346 (2006)
Morris, P.: The breakthrough method for escaping local minima. AAAI 6, 40-45 (1993)
Murchland, J.D.: Braess’s paradox of traffic flow. Transp. Res. 4, 391–394 (1970)
Nagurney, A., Boyce, D.: Preface to “on a paradox of traffic planning”. Transp. Sci. 39(4), 443–445 (2005)
Pas, E.I., Principio, S.L.: Braess’s paradox: some new insights. Transp. Res. Part B 31(3), 265–276 (1997)
Patriksson, M.: The Traffic Assignment Problem—Models and Methods. Linköping Institute of Technology, Linköping (1991)
Roughgarden, T.: Selfish Routing. Ph.D dissertation, Cornell Univ., USA, May (2002). http://theory.stanford.edu/~tim/
Roughgarden, T.: Stackelberg scheduling strategies. SIAM J. Comput. 33(2), 332–350 (2004)
Roughgarden, T.: Selfish Routing and the Price of Anarchy. MIT press, Cambridge, MA (2005)
Roughgarden, T.: On the severity of braess’s paradox: designing networks for selfish users is hard. J. Comput. Syst. Sci. 72(5), 922–953 (2006)
Selman, B., Kautz, H., Cohen, B.: Local search strategies for satisfiability testing. DIMACS 26, 521–532 (1993)
Steinberg, R., Zangwill, W.I.: The prevalence of Braess’ paradox. Transp. Sci. 17(3), 301–318 (1983)
Valiant, G., Roughgarden, T.: Braess’s paradox in large random graphs. Random Struct. Algorithms 37(4), 495–515 (2010)
Végh, L.A.: Strongly polynomial algorithm for a class of minimum-cost flow problems with separable convex objectives. In: Proceedings of the 44th ACM Symposium on Theory of Computing (STOC ’12), pp. 27–40 (2012)
International Competition and Symposium on Satisfiability Testing, Beijing ’96, Beijing, China, March 15–17 (1996)
2nd Dimacs Implementation Challenge. In: Johnson, D., Trick, M. (eds.) Dimacs Series in Discrete Mathematics and TCS, 26(4), AMS (1996). http://dimacs.rutgers.edu/Volumes/Vol26.html
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the project Algorithmic Game Theory, co-financed by the European Union (European Social Fund-ESF) and Greek national funds, through the Operational Program “Education and Lifelong Learning”, under the research funding program Thales, by the EU ERC project RIMACO, by EU ERC project ALGAME Grant Agreement no. 321171, and by the EU FP7/2007-13 (DG INFSO G4-ICT for Transport) project eCompass Grant Agreement no. 288094.
Rights and permissions
About this article

Cite this article
Fotakis, D., Kaporis, A.C., Lianeas, T. et al. Resolving Braess’s Paradox in Random Networks. Algorithmica 78, 788–818 (2017). https://doi.org/10.1007/s00453-016-0175-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00453-016-0175-2