Abstract
Climate change is rapidly altering the composition and availability of snow, with implications for snow-affected ecological processes, including reproduction, predation, habitat selection, and migration. How snowpack changes influence these ecological processes is mediated by physical snowpack properties, such as depth, density, hardness, and strength, each of which is in turn affected by climate change. Despite this, it remains difficult to obtain meaningful snow information relevant to the ecological processes of interest, precluding a mechanistic understanding of these effects. This problem is acute for species that rely on particular attributes of the subnivean space, for example depth, thermal resistance, and structural stability, for key life-history processes like reproduction, thermoregulation, and predation avoidance. We used a spatially explicit snow evolution model to investigate how habitat selection of a species that uses the subnivean space, the wolverine, is related to snow depth, snow density, and snow melt on Arctic tundra. We modeled these snow properties at a 10 m spatial and a daily temporal resolution for 3 years, and used integrated step selection analyses of GPS collar data from 21 wolverines to determine how these snow properties influenced habitat selection and movement. We found that wolverines selected deeper, denser snow, but only when it was not undergoing melt, bolstering the evidence that these snow properties are important to species that use the Arctic snowpack for subnivean resting sites and dens. We discuss the implications of these findings in the context of climate change impacts on subnivean species.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Climate change is rapidly altering the quality and availability of snow at Earth’s high latitudes (Callaghan et al. 2011). Increasing air temperatures are driving reductions in snow accumulation and contractions in the snow-covered period, and the snow that does accumulate is generally wetter and denser. Since snow directly alters physical landscape features such as the energy landscape (e.g., Crête and Larivière 2003) and availability of resources (e.g., Aars and Ims 2002), these changes are dramatically rearranging the drivers of wildlife movement, habitat selection, and life-history events.
However, the way that snow influences such ecological processes varies with spatiotemporally dynamic snowpack properties, so understanding wildlife response to the changing snowpack relies on a mechanistic understanding of the link between these properties and ecology (Berteaux et al. 2017). For example, snow depth and surface hardness influence the energetic costs associated with locomotion in a variety of terrestrial taxa (Crête and Larivière 2003), with cascading effects on spatial distribution, habitat selection, survival, and overall population processes (Mahoney et al. 2018; Reinking et al. 2018). Similarly, hardness at the base of the snowpack can influence population cycling and survival among small mammals and ungulates, often resulting from freeze-thaw or rain-on-snow events that prevent animals from accessing forage (Aars and Ims 2002).
For species that rely on the subnivean space for reproductive dens, thermoregulation, or to avoid predators, the influence of spatiotemporal snow dynamics on ecological processes can be particularly acute. Rain-on-snow and mid-winter melt events, which reduce the thermoregulatory and structural integrity of snow, can have profound effects on animals using subnivean birth lairs or dens, such as polar bears (Ursus maritimus), ringed seals (Phoca hispada), and wolverines (Gulo gulo), sometimes resulting in den collapse and mortality (Clarkson and Irish 1991; Stirling and Smith 2004). Changes in snow density can influence the availability of suitable burrowing habitat, since density is negatively related to thermal insulation but positively related to structural stability (Colbeck 1982); therefore, animals might be expected to seek intermediate snow densities. Similarly, deeper snow confers more thermal insulation and protection from supranivean predators, but requires more energy to access, so changes to snow depth can alter the capacity of animals to effectively thermoregulate or avoid predators. Neglecting to account for such snow properties in ecological studies risks mischaracterizing a crucial component of ecosystem dynamics.
Despite this, incorporating snow data into studies of wildlife ecology remains a nascent field, in part due to the considerable logistical difficulty in collecting accurate snow-related data at biologically relevant resolutions across temporal and spatial scales of interest (Magoun et al. 2017; Boelman et al. 2019). Further difficulty arises from the inherent complexity of the snowpack, which can change rapidly at fine resolutions in response to weather conditions, terrain, and vegetation (Colbeck 1982; Sturm et al. 1995). Animals may respond to a wide range of such dynamic snowpack characteristics, including depth, density, hardness, structural integrity, and phenology (Berteaux et al. 2017), and identifying and measuring the characteristics that are relevant to the biological process of interest for a particular species can present a considerable challenge.
Spatially explicit snow evolution models promise to reduce some of the logistical hurdles of accurately building snow properties into ecological models (Boelman et al. 2019). Snow evolution models are numerical models that estimate snow characteristics based on meteorological, topographic, and land-cover inputs. These models have typically been developed to address hydrological questions and for avalanche forecasting, though their broad applicability to other disciplines, including wildlife biology, is increasingly recognized (Liston et al. 2016; Mahoney et al. 2018; Reinking et al. 2018). For example, SnowModel (Liston et al. 2020) can be flexibly applied to diverse landscapes and snow regimes such as tundra, coastal regions, forested areas, and sea ice. Furthermore, it produces daily (or sub-daily) outputs of snow characteristics including depth, density, snow water equivalent (SWE), runoff volume, solid and liquid precipitation, and sublimation. The model is capable of assimilating field observations of SWE (Liston and Hiemstra 2008) to correct errors in precipitation datasets; precipitation can be difficult to measure accurately and is frequently inaccurate in meteorological reanalysis products used for model forcing (e.g., Liston and Hiemstra 2008; Liston et al. 2020). The spatial resolution of the SnowModel outputs can range from 1 m to 10 km, depending on the application of interest, and is defined by the resolution of the underlying digital elevation model (DEM) and land-cover raster. SnowModel’s flexibility and diverse outputs make it broadly applicable to studies of wildlife ecology, and it has been applied to diverse systems and ecological processes including polar bear denning in the Arctic (Liston et al. 2016), Dall sheep (Ovis dalli) habitat selection in alpine Alaska (Mahoney et al. 2018), and pronghorn (Antilocapra americana) mortality risk in sagebrush steppe (Reinking et al. 2018).
Here, we demonstrate the value of including spatiotemporally variable snow properties (and not simply presence or absence) in ecological models of species that rely on the subnivean space. Furthermore, we provide a mechanistic context for understanding the impacts of climate change on such species by assessing habitat selection and movement of wolverines in response to physically based snow property representations. Specifically, we investigated whether habitat selection and movement among wolverines not associated with reproductive dens (hereafter non-denning wolverines) are altered by relatively fine-scale (<30 m) spatiotemporally variable tundra snowpack characteristics. We focused on non-denning wolverines to evaluate snow’s importance to the species apart from its well-documented role in reproductive denning (Magoun and Copeland 1998). We evaluated (1) the utility of including high-resolution snow property data in models of wolverine habitat selection, and (2) whether wolverine habitat selection and movement in relation to snow indicate the excavation of subnivean cavities. Observations from published works (Magoun 1985) and our own fieldwork indicate that non-denning wolverines on Arctic tundra dig resting cavities in deep snowdrifts during winter and spring. Building on this, we predicted that high-resolution snow property data would substantially improve the ability of a statistical model to evaluate wolverine habitat selection and movement, and that wolverines would select areas of deeper, intermediate-density snow, when the snow is not melting. We further predicted that these snow attributes would reduce wolverine movement rate, reflecting the importance of these attributes for resting sites. We based these predictions on the assumptions that deep snow provides more structural protection, higher-quality food caching habitat, and more abundant subnivean prey (Duchesne et al. 2011), and that denser snow offers better structural integrity for snow caves and tunnels. Furthermore, we assumed that these snow properties would be reduced during melt, since meltwater reduces the thermal resistance and structural stability of the snowpack (Colbeck 1982).
Materials and methods
Study area
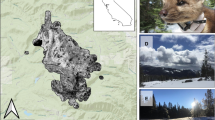
We collected data in the vicinity of Umiat (69.37° N, 152.13° W) and Toolik Field Station 68.63° N, 149.60° W), Alaska (Fig. 1). This region encompasses the transition from the Brooks Range in the south, through the foothills region, north to the Arctic coastal plain. The study area is treeless, although shrubs can grow to >2 m tall along riparian corridors (Figure 2; Huryn and Hobbie 2012). The Brooks Range is characterized by steep, rugged terrain with elevations ranging from 700 to 2700 m. The foothills region is characterized by low rolling hills with elevations ranging from 60 to 1000 m. The coastal plain is mostly flat, but broken by stream cuts, permafrost-related terrain features such as polygons and pingos, and eroded lake edges (Huryn and Hobbie 2012).

Study area in Arctic Alaska (a). The blue polygon in (a) indicates the minimum convex polygon containing all wolverine relocations used in the analysis, the broken black line shows the Dalton Highway, and the black box indicates the extent of panels (b), (c), and (d) within the study area, providing detailed views of lake edges (b), streams/rivers (c), and terrain ruggedness (d; darker colors indicate more rugged terrain)

Rolling tundra near Umiat, characteristic of the North Slope foothills (a), and a collared wolverine traveling along a river corridor (b; photograph courtesy of Peter Mather)
Snowpack in the study area is typically categorized as either “veneer,” a relatively thin layer, or “snowdrift,” a deeper, wind-deposited layer (Benson and Sturm 1993). Snowdrifts are associated with topographic features that decelerate wind, such as incised stream channels, cut-banks along lake edges, ridgelines, vegetation, and degrading permafrost features. As the snow-transporting winds slow, snow grains accumulate on the snow surface. During wind transport, snow grains deteriorate into small particles that become densely packed and highly bonded upon deposition (Colbeck 1982). Additionally, veneer snow undergoes metamorphism driven by the temperature gradient and associated vapor pressure gradient between the ground surface and the air, whereby water vapor is transported from the bottom toward the top of the snowpack, resulting in a large-grained, low-density snow crystals called depth hoar (Colbeck 1982). The combination of these two processes leads to a largely binary snowpack with a dense wind slab overlying poorly consolidated, low-density snow. This process happens to a lesser extent in snowdrifts, where deeper snow results in a less pronounced temperature gradient and the higher density wind-transported snow is less permeable to vapor flow through the snowdrift. As such, wind-drifted snow is typically higher density (roughly 250–550 kg·m−3), while veneer snow is typically lower density (150–250 kg·m−3, Benson and Sturm 1993). Up to 50% of snow deposited on tundra is blown by wind into snowdrifts, up to several meters deep, that cover approximately 5% of the surface area of the landscape (Benson and Sturm 1993; Sturm et al. 2001). The remaining 95% of the landscape is covered by veneer snow, typically less than 50 cm deep. The period of continuous snow cover typically initiates in September or October. Snowmelt begins in late April or early May (although this date is advancing with climate change), and proceeds rapidly as day length and air temperature increases (Hinzman et al. 2005; Callaghan et al. 2011). The tundra is mostly snow-free by late May or early June (Macander et al. 2015).
Study species
Wolverines occur across the study area, although their occupancy is non-uniform and correlates with rugged terrain and the presence of well-drained soils (Poley et al. 2018). Generally, wolverines are considered a snow-associated species, and on the Arctic tundra, which comprises a considerable portion of the wolverine’s global distribution, the relative importance of snow as a structural habitat component may be higher than in other ecosystems. Non-snow structures that are associated with reproductive dens and resting sites elsewhere, such as trees, boulders, and beaver lodges (May et al. 2012; Jokinen et al. 2019), are sparse or absent on tundra, and although studies of wolverine habitat associations on tundra are limited (but see Magoun 1985; Poley et al. 2018), all reproductive dens documented on the tundra have been in deep, drifted snow (Magoun and Copeland 1998), and non-reproductive wolverines have been documented excavating cavities in snow to avoid predators, behaviorally thermoregulate, and cache food (Magoun 1985, Glass et al. In press). With few exceptions (e.g., Magoun and Copeland 1998; Pozzanghera et al. 2016; Magoun et al. 2017), only snow presence/absence data at >500 m pixel resolution have been used to inform the relationship between wolverines and snow, although the ways in which this and other species (e.g., ringed seals, Stirling and Smith 2004) are affected by snow are almost certainly mediated by more complicated dynamically evolving snow properties at much finer spatial resolutions (Magoun et al. 2017).
Wolverine capture and collaring
We captured wolverines near Umiat (06-Apr-2016–26-Apr-2016) and Toolik Field Station (03-Mar-2017–28-Apr-2017 and 25-Feb-2018–18-Apr-2018), Alaska using portable baited wooden box traps (modified from Lofroth et al. 2008). We moved traps opportunistically to maximize trapping yield, resulting in minimum convex polygons surrounding our trapping areas of 715 and 3100 km2 at Umiat and Toolik, respectively. We fitted wolverines with 250–300g Followit Tellus Ultra Light (Fig. 2; Followit Sweden AB, Lindesberg, Sweden) or Lotek LiteTrack 250 Iridium GPS collars (Lotek Wireless, Newmarket, Canada) with a 40-min fix schedule. All animal capture and handling procedures were approved by University of Alaska Fairbanks Institutional Animal Care and Use Committee protocol 847738 and Alaska Department of Fish and Game scientific permits 16-093, 17-085, and 18-085.
We limited analyses to GPS data collected during the snow-covered period (i.e., when the majority of the landscape was snow covered, subjectively defined as ending May 10; collars were deployed mid-winter, so we did not define a fall starting date). Because we were interested in non-denning habitat selection, we excluded 538 (3% of total) steps of denning females and their mates within 1 km of their den site. Steps with intervals longer than 43 min also were excluded from analysis.
Environmental covariates
We estimated snow depth at 10 m spatial resolution using SnowModel, a numerical model that incorporates topography, land-cover, meteorological data, and ground measurements of SWE to recreate snowpack spatial distribution and temporal evolution. For a detailed description of Snow Model, see Liston et al. (2020), Appendices A–H. We simulated snow depth, SWE, and SWE melt at a daily time step, enabling us to link snow characteristics with wolverine relocations both temporally and spatially (Fig. 3). We used an Interferometric Synthetic Aperture Radar (IfSAR) 5 m DEM, resampled to 10 m resolution, for topography data. We used National Aeronautical and Space Administration (NASA) Modern Era Retrospective-Analysis for Research and Applications Version 2 (MERRA-2) for meteorological data, and we used the model MicroMet (Liston and Elder 2006) to downscale these data to the 10 m resolution required for the SnowModel simulations. We corrected MERRA-2 precipitation values using 21 ground measurements of SWE (Arp 2018; Pedersen et al. 2019; Stuefer et al. 2019), by assimilating them into SnowModel using the model SnowAssim (Liston and Hiemstra 2008).

Example SnowModel output for 18-Apr-2017 illustrating the fine spatial scale over which snow depth varies within the study area, overlaid with wolverine movement data (open circles and lines) during spring 2017. Circles are opaque, so overlapping circles (indicating multiple GPS locations) appear brighter. Pixels are 10 × 10 m
SnowModel has a variety of user-defined parameters that enable flexible application to different environments; we qualitatively compared SnowModel outputs to high-resolution structure-from-motion (SfM) maps of snow depth (Matthew Sturm, unpublished data) at focal sites within our study area to fine-tune these parameters. The structure-from-motion technique uses aerial photogrammetry to create three-dimensional maps of the snow surface elevation, from which the terrain elevation is subtracted to obtain snow depth. To accommodate the relatively high spatial resolution of our simulations and our interest in snowdrifts that occur on a scale of 10 s of meters (Fig. 3), we adjusted the MicroMet wind parameters (Liston and Elder 2006) until the SnowModel simulated snowdrifts visually matched those observed in the SfM data. Since vegetation height data at the resolution of our simulations (10 m) were unavailable, and rescaling coarser land-cover data introduced clear artifacts to snow depth predictions, we used a uniform vegetation height of 5 cm for the entire domain. This decision reflects the dominance of tussock-tundra in our study area, though precludes the effect of shrubs on capturing snow. Additionally, to better match SfM snow depth maps, we uniformly increased the MERRA-2 wind speeds by a factor of 1.5 (Mahoney et al. 2018).
We calculated snow density as SWE divided by snow depth for a given pixel. We calculated the daily fraction (0–1) of seasonal snow melt as:
where SSMTk is the season’s total amount of SWE (cm) that has melted for a given pixel on date k, and SSMTend is the season’s total SWE that melts for a given pixel by the end of the season. We then converted this into a binary indicator variable representing whether or not any snow had melted during the preceding 24 h.
In addition to snow covariates, we investigated terrain ruggedness, distance to streams/rivers, and distance to lake edges (Table 1, Fig. 1), because these are commonly related to wolverine habitat selection elsewhere (Poley et al. 2018; Scrafford et al. 2018), or because we expected them to be influential based on our field observations. We decided against including distance to roads as a covariate, since the Dalton Highway is the only road in the study area (Fig. 1), and most collared wolverines never directly encountered it. Although we are unaware of other studies that have investigated the response of wolverines to lake edges, we included this as a covariate, since many lake edges on the North Slope are characterized by steep, eroded cut-banks and tall shrubs, making them attractive for ptarmigan, snowshoe hares, and other potential prey species (Ehrich et al. 2012). We used the National Hydrology Dataset for lake data, and converted the lake polygons into polylines to assess habitat selection in relation to lake edges (i.e., to permit non-zero values for locations occurring within the original polygons on frozen lakes). We derived terrain ruggedness as the square root of the summed squared deviations in elevation between each cell and every neighboring cell (Riley et al. 1999), based on an IfSAR 5 m resolution DEM and included it in our models as a continuous variable. We derived stream and river data from the IfSAR 5 m resolution DEM using ESRI’s Flow Accumulation tool in the Spatial Analyst ToolPak (ESRI ArcMap 10.3.1). This tool allows users to define flowlines according to the number of pixels that have accumulated upstream. In this way, we set accumulation values for streams and rivers as greater than 300 pixels to best capture our perception of what constituted a “stream” on the landscape. We used the ESRI’s Erase tool to exclude flowlines that overlapped lakes, and we clipped the resultant layer to include data only within the coastline. We calculated distances from wolverine GPS locations to streams and rivers using ESRI’s Near tool.
We assessed all predictor covariates for collinearity and found the highest degree of correlation to be 0.58, so we removed no covariates. We also standardized all continuous predictor variables (subtracted the mean and divided by the standard deviation).
Habitat and movement modeling
Step selection analysis
To assess how wolverine space use responds to spatially and temporally variable environmental conditions, we used integrated step selection analyses (iSSA; Avgar et al. 2016). iSSA describes animal movement as a series of discrete “steps” which represent movement between two locations in space. We matched each realized step (time t) with five available steps, each originating at the previous location (time t−1) but having a step length and turn angle drawn from gamma and Von Mises distributions, respectively, which were parameterized empirically from the observed data of that animal. Matched sets of one realized and five available steps form a stratum. For each step, we extracted environmental covariates at the start and end of the step to test hypotheses regarding movement and habitat selection, respectively. We fit step selection functions (SSF) for each wolverine individually using the R package survival (Therneau et al. 2020). We included the natural logarithm of step length (lnSL) as a covariate in all models to explicitly account for the resource-independent movement kernel, thereby reducing bias in the estimation of our habitat-related parameters (Forester et al. 2009; Avgar et al. 2016).
Modeling approach
We employed a two-step model evaluation process. In the first step, we built a “base” model describing wolverine habitat selection in the absence of snow by evaluating all possible combinations of non-snow covariates (distance to stream/river, distance to lake edge, and terrain ruggedness). Because we expected non-linear responses to all covariates, we log-transformed the distance terms and included terrain ruggedness as a quadratic term. As such, there were three separate terms included in our candidate base models, generating seven possible models: ln (distance to stream/river), ln (distance to lake edge), and (terrain ruggedness + terrain ruggedness2). To evaluate population-level model performance, we calculated Akaike weights (Burnham and Anderson 2002) for each set of candidate models for each wolverine, and then calculated the mean Akaike weight across individuals using a non-parametric bootstrap, weighted by sample size (Scrafford et al. 2018). We designated the model with the highest population-level Akaike weight our “base” model.
In the second phase of our modeling process, we evaluated the effect of including snow-related covariates, and investigated our hypothesis that wolverines’ selection for snow properties is consistent with the excavation of subnivean cavities for resting sites, food caches, and/or subnivean hunting sites. To do so, we built a candidate model set including all three possible combinations of the covariates “Snow depth + Snow depth2 + lnSL:Snow depth + lnSL:Snow depth2” and “Snow density + Snow density2 + lnSL:Snow density + lnSL:Snow density2,” where snow covariates interacting with lnSL were extracted at the step’s start to evaluate their influence on wolverine movement (Avgar et al. 2016). We added these covariates to those of the base model, and fit these candidate models separately to strata that contained at least one step during which snow had undergone melt (“melt” models) and strata that did not contain any steps with melting snow (“no melt” models). We then used the same bootstrapped mean Akaike weight procedure described above to evaluate model performance. We calculated average population-level coefficient estimates and 95% confidence intervals using a non-parametric bootstrap of individual estimates, weighted by their inverse variance (Scrafford et al. 2018).
To visualize our results, we calculated the linear predictors based on the population-level coefficient estimates from the best performing “no melt” model and fit generalized additive models (GAMs) of exponentiated linear predictors against predictor covariates of interest, and then plotted the result (termed a “relative probability of use plot,” Avgar et al. 2017). We used the fitted values from these GAM functions to evaluate relative probability of use at specific values of covariates (Avgar et al. 2017). We selected the number of knots in our GAMs using Generalized Cross Validation (Craven and Wahba 1978). In addition, we used the habitat weighting function generated by our SSF to calculate the relative probability of use for habitat pixels in the vicinity of Toolik Field Station, creating a spatial visualization of our results.
We calculated the mean movement rate for each wolverine using the equation (Ladle et al. 2019):
where b1 and b2 are the tentative individual-level shape and scale parameters, respectively, βlnSL is the population-level coefficient for lnSL, and β1…n are the population-level coefficients for the interaction between lnSL and snow covariates. To evaluate the influence of specific covariates, we held all other snow covariates constant at their median values, and varied the covariate of interest across its range. We then calculated a population-level mean using a non-parametric bootstrap, weighted by sample size (Scrafford et al. 2018).
Finally, we evaluated both the base model and the top performing “no melt” model for their ability to predict habitat use patterns among out-of-sample data by adapting the k-fold cross-validation approach described in Boyce et al. (2002), using individual animals as “folds.” Specifically, for each model, we iteratively withheld the data of one individual, fit the model to the data of the remaining individuals, and used the fitted model to generate linear predictors for the withheld data. We exponentiated these linear predictors and partitioned them into ten bins of equal sizes, and then divided the number of realized steps by available steps in each bin. This provided a frequency for each bin (analogous to the “area adjusted frequency”; Boyce et al. 2002), which we expected to increase for higher bins, since the proportion of realized to available steps should be greater for higher values of linear predictors. We then averaged frequencies across iterations and calculated the Spearman’s Rank correlation coefficient for bin versus frequency. Validating the model in this way assesses how well it can be generalized to the population as a whole.
Results
We captured and GPS-collared 21 adult wolverines (11 female, 10 male), obtaining 16,167 steps, of which 15,493 (across all 21 individuals) were included in the “no melt” models and 674 (across 11 individuals; 6M 5F) were included in the “melt” models.
Base model
Akaike weight rankings for candidate base models and coefficient estimates for the top performing base model are found in Tables S1 and S2, respectively. We found support for including streams and rivers, lake edges, and terrain ruggedness in our base model (Table S1). Wolverines generally selected more rugged areas closer to streams, rivers, and lakes (Table S2). Distance to lake edge only improved model performance marginally over the next best model (Akaike weight evidence ratio = 1.04, Table S1), and as such had minimal effect compared with other predictors on the relative probability that a wolverine selected a resource unit (Table S2). Wolverines were twice as likely to use a resource unit 10 m from a stream or river than one 400 m away, and were nearly four times more likely to use a resource unit with a terrain ruggedness index of 150 (characteristic of the mountain slopes in the southern portion of the study area and the higher relief foothills) than one of 20 (typical of valley bottoms and the rolling tundra, Fig. 4).

Regional (a) and detailed (b) relative probability of use map for wolverines, as well as SnowModel-produced snow depth (c) in the vicinity of Toolik Field Station, Alaska. In (a) and (b), red indicates higher relative probability of use, generally associated with streams and deep, dense snow, and blue indicates lower relative probability of use. Model output based on SnowModel predictions for 18-April-2017. In (c), darker shades represent deeper snow. The broken black line in (a) shows the Dalton Highway
Influence of snow on habitat selection and movement
For non-melting snow, adding any snow covariate improved model performance above the base model, and the model including both snow density and snow depth performed best among all candidate models (bootstrapped mean Akaike weight = 0.4, Table 2). In general, wolverines selected deeper and denser snow (Fig. 5, Table 3). Specifically, wolverines were twice as likely to use a resource unit characterized by snow that was 250 cm deep than a unit with snow 20 cm deep, and were similarly twice as likely to use a resource unit with snow of density 450 kg·m−3 than 250 kg·m−3 (Fig. 5). Wolverine movement rate was negatively influenced by snow depth but positively influenced by snow density across the range of densities available to wolverines, although confidence bands generated from bootstrapped means of individual coefficient estimates suggest uncertainty in these trends (Fig. 5). For melting snow, adding any snow covariate to the base model substantially reduced performance (Table 2).

Conditional, relative probability of use (a, b) and mean movement rate (c, d) in response to non-melting snow depth (a, c) and snow density (b, d). Relative probability of use is calculated by exponentiating the linear predictors of the step selection function, and can be interpreted by comparing values against one another. For example, a relative probability of use value of 0.2 for snow of depth 250 cm is 2.2 times higher than a relative probability of use value of 0.09 for snow of depth 20 cm. Therefore, wolverines are 2.2 times more likely to select snow of depth 250 cm than snow of depth 20 cm
Both the base model and the top performing “no melt” model had high cross-validation scores (0.95 and 0.93 Spearman’s Rank correlation coefficients, respectively).
Discussion
This study demonstrates the importance of including spatiotemporally variable snow properties in ecological models of species that rely on the subnivean space, and provides a mechanistic context for understanding nuanced, but important impacts of climate change on these species (Mahoney et al. 2018; Boelman et al. 2019). Our findings are broadly consistent with our predictions; specifically, we found that (1) including snow properties in habitat selection models for snow-associated species would improve model performance, and (2) that wolverines select deeper, denser snow, but only when that snow is not undergoing melt. Our results are ambiguous regarding the importance of denser snow for subnivean cavities, suggesting that selection for denser snow may instead (or also) be driven by reduced energetic costs associated with movement. These results have important implications for wolverines and other subnivean species in the context of a rapidly changing Arctic snowpack.
Snow as a component of habitat
The subnivean zone is important to diverse taxa for its thermoregulatory and structural benefits (Pauli et al. 2013). Species such as polar bears, ringed seals, marten (Martes americana), ermines (Mustela erminea), and cricetid rodents occupy this zone for part or all of the winter. As such, studying the ways in which variable snow properties influence the quality of this habitat is an important component of understanding a species’ broader ecology. Our finding that snow depth is important to wolverines using the subnivean zone is consistent with results from other taxa. Ringed seals, polar bears, and Arctic hares all select deep, structurally stable snow for dens associated with resting and reproduction (Gray 1993; Furgal et al. 1996; Liston et al. 2016).
Snow density may also be important to subnivean species. Since denser snow caused by wind drifting is characterized by higher structural integrity and mechanical resistance to digging, but lower thermal resistance (Colbeck 1982), we expected wolverines to select an intermediate level of snow density for subnivean dens, as has been qualitatively reported for other species (Harington 1968). However, our results do not support the existence of an upper limit to selection for denser snow within the range of densities available to wolverines (Fig. 5), suggesting that any decrease in thermal resistance conferred by denser snow has negligible consequences for wolverines.
Moreover, although our results indicate a clear preference for denser snow among wolverines (Fig. 5), the mechanism underlying this selection is unclear. The slight positive influence of snow density on wolverine movement (Fig. 5) suggests that this selection may be driven by reduced energy expenditure associated with traveling over dense snow (Crête and Larivière 2003) rather than the use of dense snow for subnivean structures. This trend is somewhat unexpected, since dense snow is generally found to be important for over-snow travel among taxa with higher footloads (body mass/foot surface area; Whiteman and Buskirk 2013), but less so for wolverines which have a lower footload (Pozzanghera et al. 2016). However, the wide 95% confidence band for this relationship suggests that both processes (i.e., subnivean structures and movement) may contribute to wolverines’ selection for denser snow.
Wolverines and snow
Although there is considerable evidence supporting the importance of snow as an attribute of wolverine habitat (Magoun and Copeland 1998; Aubry et al. 2007; Pozzanghera et al. 2016; Heinemeyer et al. 2019), the exact nature of this relationship is unresolved and varies geographically. The global distribution of wolverine reproductive dens and telemetry locations overlaps broad-scale (>500 m resolution) spring snow persistence (Copeland et al. 2010), although it has been argued that this relationship may arise from uneven sampling effort (Aronsson and Persson 2017), and may not capture snow properties at a spatial scale relevant to the species (Magoun et al. 2017). Additionally, reproductive dens and individuals are increasingly being found in areas without substantial spring snowpack (Webb et al. 2016; Aronsson and Persson 2017; Jokinen et al. 2019). Regardless, the high proportion of reproductive dens that have been located in deep snow suggests an important, if not obligatory, use of this substrate by the species (Webb et al. 2016). In addition to the use of deep, persistent snow for reproductive dens, snow may play an important role in food preservation for wolverines, enabling the species to thrive in relatively low-productivity, unpredictable environments (Inman et al. 2012).
Additionally, snow may play a role in wolverine food acquisition. Cricetid rodents are an important component of wolverine diet on tundra during the snow-covered spring (Dorendorf et al. 2018). Cricetids are generally associated with deep snow on tundra; winter nest density and activity are higher in areas with deeper snow (Duchesne et al. 2011), and snow fence experiments have found that cricetids select areas with experimentally increased snow depth, subsequently returning to pretreatment levels upon fence removal (Reid et al. 2012). Little data are available regarding wolverine hunting of cricetids, but studies of Arctic fox (Vulpes lagopus) suggest that supranivean predators may not be impeded by deep snow, employing a digging technique instead of pouncing to capture subnivean cricetids in deeper snow (Bilodeau et al. 2013). Our field observations suggest that in some cases, wolverines travel short distances along the subnivean ground surface through the soft depth hoar layer, possibly implying a use of this space besides resting and food caching. Therefore, in addition to its importance for resting sites and food caching, deep snow may afford wolverines greater subnivean hunting opportunity.
Despite the ample evidence that snow is important to wolverines, this study is the first of which we are aware to systematically address the way in which within home-range habitat selection by wolverines is driven by the spatially and temporally variable snowpack. As such, we have identified several relevant issues that could aid our understanding of the relationship between wolverines and snow.
First, we show that snow is important to non-denning wolverines in the Arctic. Much of the existing literature regarding wolverines and snow focusses on its importance for thermoregulation, predation avoidance, and food caching among neonates and mothers (Magoun and Copeland 1998; Copeland et al. 2010; Inman et al. 2012). These mechanisms linking wolverines to snow are undoubtedly important. However, by focusing on non-denning wolverines in our analysis, we have shown that snow characteristics are important to wolverines for reasons other than solely creating reproductive dens, a result that finds support in other snow-denning species, including polar bears and ringed seals (Harington 1968; Kelly and Quakenbush 1990). This has important implications when considering the impact of climate change on such snow-associated species, since the way in which the changing snowpack affects these species depends on the mechanism linking them to snow. Our findings suggest that snowpack changes may impact fitness across demographics, not only among reproductive females and neonates. However, for wolverines, this relationship likely varies across the species’ geographic range, since ecosystems with more ample non-snow resting habitat (e.g., downed trees and large boulders), different wolverine diet compositions, and different snow regimes are likely characterized by a different mechanistic link between wolverines and snow. Wolverines in areas with taiga snow, for example, which is characterized by extremely low densities and depths (Sturm et al. 1995), likely excavate fewer subnivean cavities than wolverines on tundra (Jokinen et al. 2019). Explicitly accounting for the well-described and highly variable snow regimes (Sturm et al. 1995) that occur across wolverines’ global range should be a part of any conversation regarding the relationship between the species and snow.
Second, we found three specific snow characteristics to be important to wolverines: depth, density, and melt. Due to logistical limitations associated with collecting snow data (Boelman et al. 2019), most previous studies investigating wolverines and snow rely on snow metrics derived from satellite imagery, and are restricted to >500 m pixel resolution (Aubry et al. 2007; Heinemeyer et al. 2019). Additionally, such studies typically incorporate snow as a temporally summarized statistic, such as number of years with snow within a given date range (e.g., Copeland et al. 2010). In contrast, by explicitly accounting for the complex nature of the snowpack, and incorporating multiple snowpack properties, our study provides insight regarding the specific mechanism linking the substrate and the species, specifically wolverine’s use of snow for excavating subnivean cavities, and possibly the use of denser snow for reducing energy expenditure associated with over-snow travel. Additionally, studying specific snow properties enables a more informed understanding of how climate-induced changes to the Arctic snowpack may be affecting this species.
Climate change implications
Ongoing climate change is rapidly altering the Arctic snowpack. In northern Alaska, historical climate analyses and projections indicate that more snow is falling now during winter, but that the duration of the snow-covered season is contracting in both spring and fall (Callaghan et al. 2011). Indeed, the duration of the snow-covered season has decreased by 3 days per decade since 1951, with accelerating loss in the most recent decades (Callaghan et al. 2011). With these changes in mind, the results of this study are best interpreted not as a “baseline,” but rather as a snapshot in time, documenting wolverine’s relationship with snow in the midst of accelerating directional change.
Increased snow depth in the Arctic could positively influence species using subnivean cavities for resting sites and hunting during winter. For this to occur, the snow would need to be of sufficient density to maintain cavities and tunnels, and/or increased snow depth would need to positively influence cricetid populations. However, we suspect that the most direct snow-mediated impact of climate change on these species results from earlier spring melt and increased frequency of mid-winter melt events, since these changes require animals to seek alternate structural protection and reduce food caching opportunities. Our finding that wolverines in the Arctic are sensitive to the melt status of the snow suggests that the date of snow disappearance, as is reflected in the remotely sensed presence/absence data commonly used for assessing snow-associated species’ response to snow, may be less biologically important than melt initiation date.
Wolverine habitat selection in relation to non-snow environmental features
Our findings indicate that the environmental features driving wolverine habitat selection on tundra are similar to those elsewhere. Wolverines have previously been found to select streams during winter in alpine habitats (Aubry et al. 2007). We extend this finding to Arctic tundra, likely due to the use of frozen streams and rivers as travel corridors and/or habitat for prey species such as snowshoe hare and ptarmigan. Previous studies have also found that wolverines prefer more rugged terrain in montane regions (Krebs et al. 2007), as well as in tundra regions at the occupancy level of selection (Poley et al. 2018). Our study extends this finding to habitat selection operating at the within home-range level on tundra. Care should be taken in making direct comparisons between studies, however, since the spatial resolution at which a study defines terrain ruggedness alters what is considered “rugged.” In our study, at 5 m resolution, rugged terrain includes, for example, an incised stream 10 m in width; such a feature would not be captured by a terrain ruggedness index defined at a 50 m resolution.
Conclusions
Here, we highlight the importance of explicitly accounting for snowpack spatial and temporal variability, rather than simply the presence or absence of snow, in studies of subnivean species (Boelman et al. 2019). Climate change is rapidly altering the duration and quality of the snow-covered period, and the way in which these changes influence ecological processes is mediated by the specific snow properties that are important to a given process. We demonstrate that for wolverines, which rely on the subnivean space, the depth, density, and melt status of snow are important drivers of habitat selection and movement. Furthermore, we demonstrate that such snow properties, which vary over fine spatial and temporal scales, can be incorporated into ecological models using a physically based snowpack evolution model. Continuing to parse the mechanistic relationship between animals and snow using tools such as these will be a crucial component of understanding the response of high-latitude and high-elevation species to climate change.
References
Aars J, Ims RA (2002) Intrinsic and climatic determinants of population demography: the winter dynamics of tundra voles. Ecology 83:3449–3456
Aronsson M, Persson J (2017) Mismatch between goals and the scale of actions constrains adaptive carnivore management: the case of the wolverine in Sweden. Anim Conserv 20:261–269. https://doi.org/10.1111/acv.12310
Arp CD (2018) Arctic Alaska tundra and lake snow surveys from 2012–2018
Aubry KB, Mckelvey KS, Copeland JP (2007) Distribution and broadscale habitat relations of the wolverine in the contiguous United States. J Wildl Manage 71:2147. https://doi.org/10.2193/2006-548
Avgar T, Potts JR, Lewis MA, Boyce MS (2016) Integrated step selection analysis: bridging the gap between resource selection and animal movement. Methods Ecol Evol 7:619–630. https://doi.org/10.1111/2041-210X.12528
Avgar T, Lele SR, Keim JL, Boyce MS (2017) Relative selection strength: quantifying effect size in habitat- and step-selection inference. Ecol Evol 7:5322–5330. https://doi.org/10.1002/ece3.3122
Benson CS, Sturm M (1993) Structure and wind transport of seasonal snow on the Arctic slope of Alaska. Ann Glaciol 18:261–267. https://doi.org/10.3189/s0260305500011629
Berteaux D, Gauthier G, Domine F et al (2017) Effects of changing permafrost and snow conditions on tundra wildlife: critical places and times. Arct Sci 3:65–90. https://doi.org/10.1139/as-2016-0023
Bilodeau F, Gauthier G, Berteaux D (2013) Effect of snow cover on the vulnerability of lemmings to mammalian predators in the Canadian Arctic. J Mammal 94:813–819. https://doi.org/10.1007/s00442-012-2549-8
Boelman NT, Liston GE, Gurarie E et al (2019) Integrating snow science and wildlife ecology in Arctic-boreal North America. Environ Res Lett. https://doi.org/10.1088/1748-9326/aaeec1
Boyce MS, Vernier PR, Nielsen SE, Schmiegelow FKA (2002) Evaluating resource selection functions. Ecol Modell 157:281–300
Burnham KP, Anderson DR (2002) Model selection and multimodel inference: a practical information-theoretic approach, 2nd edn. Springer, New York
Callaghan TV, Johansson M, Brown RD et al (2011) The changing face of Arctic snow cover: a synthesis of observed and projected changes. Ambio 40:17–31. https://doi.org/10.1007/s13280-011-0212-y
Clarkson PL, Irish D (1991) Den collapse kills female polar bear and two newborn cubs. Arctic 44:83–84
Colbeck SC (1982) An overview of seasonal snow metamorphism. Rev Geophys 20:45–61. https://doi.org/10.1029/RG020i001p00045
Copeland JP, McKelvey KS, Aubry KB et al (2010) The bioclimatic envelope of the wolverine (Gulo gulo): do climatic constraints limit its geographic distribution? Can J Zool 88:233–246. https://doi.org/10.1139/Z09-136
Craven P, Wahba G (1978) Smoothing noisy data with spline functions: estimating the correct degree of smoothing by the method of generalized cross-validation. Numer Math 31:377–403
Crête M, Larivière S (2003) Estimating the costs of locomotion in snow for coyotes. Can J Zool 81:1808–1814. https://doi.org/10.1139/z03-182
Dorendorf RR, Sivy KJ, Robards MD et al (2018) Spring food habits of wolverine (Gulo gulo) in the Colville River watershed, Alaska. Can Field-Naturalist 132:268–278
Duchesne D, Gauthier G, Berteaux D (2011) Habitat selection, reproduction and predation of wintering lemmings in the Arctic. Oecologia 167:967–980. https://doi.org/10.1007/s00442-011-2045-6
Ehrich D, Rolf JH, Ims RA et al (2012) The importance of willow thickets for ptarmigan and hares in shrub tundra: the more the better? Oecologia 168:141–151. https://doi.org/10.1007/s00442-011-2059-0
Forester JD, Im HK, Rathouz PJ (2009) Accounting for animal movement in estimation of resource selection functions: Sampling and data analysis. Ecology 90:3554–3565
Furgal CM, Kovacs KM, Innes S (1996) Characteristics of ringed seal, Phoca hispida, subnivean structures and breeding habitat and their effects on predation. Can J Zool 74:858–874. https://doi.org/10.1139/z96-100
Glass TW, GA Breed, MA Robards, CT Williams, K Kielland (In Press) Trade-off between predation risk and behavioural thermoregulation drives resting behaviour in a cold-adapted mesocarnivore. Animal Behaviour
Gray DR (1993) Behavioural adaptations to Arctic winter: shelter seeking by Arctic hare (Lepus arcticus). Arctic 46:340–353. https://doi.org/10.14430/arctic1362
Harington CR (1968) Denning habits of the polar bear (Ursus maritimus Phipps). Can Wildl Serv Rep Ser 5:4–30
Heinemeyer K, Squires J, Hebblewhite M et al (2019) Wolverines in winter: Indirect habitat loss and functional responses to backcountry recreation. Ecosphere 10:1–23. https://doi.org/10.1002/ecs2.2611
Hinzman LD, Bettez ND, Bolton WR et al (2005) Evidence and implications of recent climate change in Northern Alaska and other Arctic regions. Clim Change 72:251–298. https://doi.org/10.1007/s10584-005-5352-2
Huryn A, Hobbie J (2012) Land of extremes: a natural history of the Arctic North Slope of Alaska. University of Alaska Press, Fairbanks
Inman RM, Magoun AJ, Persson J, Mattisson J (2012) The wolverine’s niche: linking reproductive chronology, caching, competition, and climate. J Mammal 93:634–644. https://doi.org/10.1644/11-MAMM-A-319.1
Jokinen ME, Webb SM, Manzer DL, Anderson RB (2019) Characteristics of Wolverine (Gulo gulo) dens in the lowland boreal forest of north-central Alberta. Can Field-Nat 133:1–15. https://doi.org/10.22621/cfn.v133i1.2083
Kelly BP, Quakenbush LT (1990) Spatiotemporal use of lairs by ringed seals (Phoca hispida). Can J Zool 68:2503–2512
Krebs J, Lofroth EC, Parfitt I (2007) Multiscale habitat use by wolverines in British Columbia, Canada. J Wildl Manage 71:2180–2192. https://doi.org/10.2193/2007-099
Ladle A, Avgar T, Wheatley M et al (2019) Grizzly bear response to spatio-temporal variability in human recreational activity. J Appl Ecol 56:375–386. https://doi.org/10.1111/1365-2664.13277
Liston GE, Elder K (2006) A meteorological distribution system for high-resolution terrestrial modeling (MicroMet). J Hydrometeorol 7:217–234. https://doi.org/10.1175/JHM486.1
Liston GE, Hiemstra CA (2008) A simple data assimilation system for complex snow distributions (SnowAssim). J Hydrometeorol 9:989–1004. https://doi.org/10.1175/2008JHM871.1
Liston GE, Perham CJ, Shideler RT, Cheuvront AN (2016) Modeling snowdrift habitat for polar bear dens. Ecol Modell 320:114–134. https://doi.org/10.1016/j.ecolmodel.2015.09.010
Liston GE, Itkin P, Stroeve J et al (2020) A lagrangian snow-evolution system for sea-ice applications (SnowModel-LG): part I–model description. J Geophys Res Ocean. https://doi.org/10.1029/2019jc015913
Lofroth E, Klafki R, Krebs J, Lewis D (2008) Evaluation of live-capture techniques for free-ranging wolverines. J Wildl Manage 72:1253–1261. https://doi.org/10.2193/2006-393
Macander MJ, Swingley CS, Joly K, Raynolds MK (2015) Landsat-based snow persistence map for northwest Alaska. Remote Sens Environ 163:23–31. https://doi.org/10.1016/j.rse.2015.02.028
Magoun AJ (1985) Population characteristics, ecology, and management of wolverines in Northwestern Alaska. University of Alaska, Fairbanks
Magoun AJ, Copeland JP (1998) Characteristics of wolverine reproductive den sites. J Wildl Manage 62:1313–1320
Magoun AJ, Robards MD, Packila ML, Glass TW (2017) Detecting snow at the den-site scale in wolverine denning habitat. Wildl Soc Bull 41:381–387. https://doi.org/10.1002/wsb.765
Mahoney PJ, Liston GE, LaPoint S et al (2018) Navigating snowscapes: Scale-dependent responses of mountain sheep to snowpack properties. Ecol Appl 28:1715–1729. https://doi.org/10.1002/eap.1773
May R, Gorini L, van Dijk J et al (2012) Habitat characteristics associated with wolverine den sites in Norwegian multiple-use landscapes. J Zool 287:195–204. https://doi.org/10.1111/j.1469-7998.2012.00907.x
Pauli JN, Zuckerberg B, Whiteman JP, Porter W (2013) The subnivium: a deteriorating seasonal refugium. Front Ecol Environ 11:260–267. https://doi.org/10.1890/120222
Pedersen SH, Liston GE, Welker JM (2019) Snow depth and snow density measured in Arctic Alaska for caribou winter applications in 2018 and 2019. https://doi.org/10.18739/A2MS3K24P.
Poley LG, Magoun AJ, Robards MD, Klimstra RL (2018) Distribution and occupancy of wolverines on tundra, northwestern Alaska. J Wildl Manage 85:991–1002. https://doi.org/10.1002/jwmg.21439
Pozzanghera CB, Sivy KJ, Lindberg MS, Prugh LR (2016) Variable effects of snow conditions across boreal mesocarnivore species. Can J Zool 94:697–705. https://doi.org/10.1139/cjz-2016-0050
Reid DG, Bilodeau F, Krebs CJ et al (2012) Lemming winter habitat choice: a snow-fencing experiment. Oecologia 168:935–946. https://doi.org/10.1007/s00442-011-2167-x
Reinking AK, Smith KT, Monteith KL et al (2018) Intrinsic, environmental, and anthropogenic factors related to pronghorn summer mortality. J Wildl Manage 82:608–617. https://doi.org/10.1002/jwmg.21414
Riley SJ, DeGloria SD, Elliot R (1999) A terrain ruggedness index that quantifies topographic heterogeneity. Intermt J Sci 5:23–27
Scrafford MA, Avgar T, Heeres R, Boyce MS (2018) Roads elicit negative movement and habitat-selection responses by wolverines (Gulo gulo luscus). Behav Ecol 29:534–542. https://doi.org/10.1093/beheco/arx182
Stirling I, Smith TG (2004) Implications of warm temperatures and an unusual rain event for the survival of ringed seals on the coast of Southeastern Baffin Island. Arctic 57:59–67
Stuefer S, Kane D, Dean K (2019) Snow water equivalent data from the Upper Kuparuk River watershed, Arctic Alaska, 1997–2017
Sturm M, Holmgren J, Liston GE (1995) A seasonal snow cover classification system for local to global applications. J Clim 8:1261–1283
Sturm M, Liston GE, Benson CS, Holmgren J (2001) Characteristics and growth of a snowdrift in Arctic Alaska, U.S.A. Arctic Antarct Alp Res 33:319–329
Therneau TM, Lumley T, Atkinson E, Crowson C (2020) survival: Survival Analysis
Webb SM, Anderson RB, Manzer DL et al (2016) Distribution of female wolverines relative to snow cover, Alberta, Canada. J Wildl Manage 80:1461–1470. https://doi.org/10.1002/jwmg.21137
Whiteman JP, Buskirk SW (2013) Footload influences wildlife use of compacted trails in the snow. Wildlife Biol 19:156–164. https://doi.org/10.2981/12-112
Acknowledgements
We thank A. Magoun, as well as Iñupiat residents of Nuiqsut and Utqiaġvik, particularly Q. Harcharek, for early conversations that provided valuable context for this study. We thank J. Timm, J. Johnson, and the rest of the staff at Toolik Field Station, as well as M. Kynoch, R. Dorendorf, D. Schertz, C. Haddad, and S. Andersen with the Wildlife Conservation Society for logistical support in the field. M. Keech, P. Valkenburg, T. Laird, H. Chmura, M. Scrafford, and M. Barrueto generously aided fieldwork. We are grateful to L. Parrett and R. Klimstra with the Alaska Department of Fish and Game, and to R. Kemnitz with the Bureau of Land Management for providing crucial fieldwork support at Umiat. We thank C. Parr and M. Sturm for snow data used to ground-truth our analysis. J. Eisaguirre provided valuable input regarding our analysis. This work was supported by the M.J. Murdock Charitable Trust, Wilburforce Foundation, The Wolverine Foundation, a National Science Foundation Graduate Research Fellowship under Grant No. 1650114, and 69 generous individuals via a crowdfunding campaign.
Author information
Authors and Affiliations
Contributions
TWG and MDR conceived and designed the study. TWG conducted fieldwork and wrote the original manuscript draft. MDR and TWG obtained funding. MDR, KK, and GAB supervised the project and provided input on the study design. TWG and GAB analyzed the data and interpreted results. GEL and AKR provided snow modeling expertise. All authors reviewed and edited the manuscript.
Corresponding author
Additional information
Communicated by Nicolas Lecomte.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Glass, T.W., Breed, G.A., Liston, G.E. et al. Spatiotemporally variable snow properties drive habitat use of an Arctic mesopredator. Oecologia 195, 887–899 (2021). https://doi.org/10.1007/s00442-021-04890-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00442-021-04890-2