
Abstract
Purpose
The purpose of this study was to investigate changes in the interference pattern in surface electromyography (EMG), and its relationship with the tendency of motor unit (MU) recruitment during steady-hold and rapid muscle contractions.
Methods
Fifteen healthy adults (eight females and seven males, 22.6 ± 1.5 years old) performed steady-hold and rapid isometric contractions of the bicep brachii, adductor pollicis, and tibialis anterior muscles at various force levels. Surface EMG recordings were analyzed using Turns-Amplitude Analysis (TAA).
Results
During steady-hold contractions, the number of turns per second (T/s) increased exponentially with force during submaximal contractions, and plateaued after force levels of 66, 70 and 57 % MVC for the tibialis anterior, bicep brachii and adductor pollicis muscles, respectively. These force levels were proximate to the maximal recruitment threshold (MaxRT) reported previously. The slopes of the T/s–force relationships before the MaxRT were significantly greater than the slopes after the MaxRT for all three muscles tested. During rapid contraction, the slopes of the T/s–force relationships were significantly lower than the slopes of the steady-hold contraction at 20–40 % MVC in all three muscles, and for 40–60 % MVC in TA muscles.
Conclusions
Our results suggested that the changes in the number of turns in surface EMG with respect to muscle force can be used to estimate the force levels at which the majority of the MUs to be recruited, and completion of MU recruitment was observed at lower force levels during rapid muscle contraction.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The central nervous system controls muscle force output by activating motor units (MUs, defined as a motor neuron and all the muscle fibers it innervates). Greater muscle force is generated by activating more MUs (recruitment) and increasing the discharge rate of active MUs (rate-coding) (Adrian and Bronk 1929). The discharge rate of an MU is determined by the time intervals between consecutive motor unit action potentials (MUAPs). Rate-coding capacity has been linked to better motor performance, and can be affected by training as well as disease (Heckman and Enoka 2012). Generally, MU recruitment is investigated by observing the appearance of MUAPs using intramuscular electromyography (EMG) (Duchateau and Enoka 2011) or by changes in the frequency contents of the EMG signal (Esposito et al. 2005; Gobbo et al. 2006; Orizio et al. 1994). As muscle force is gradually increased, MUs are recruited at specific force levels (recruitment thresholds) based on their neurophysiological properties. Eventually, all the MUs in a muscle will be recruited at a specific submaximal force level (maximal recruitment threshold, MaxRT) (De Luca et al. 1982). For example, the completion of MU recruitment has been observed in tibialis anterior (TA), biceps brachii (BB) and adductor pollicis (AP) muscles, and the MaxRTs for these three muscles have been found to be 70 % (De Luca and Erim 1994), 88 % and 30–50 %, respectively (Kukulka and Clamann 1981). MU recruitment plays a significant role in muscle force generation (Clamann 1993). It has been suggested that the MaxRT is dynamic as there appears to be a compression in MU recruitment during rapid muscle contraction (Desmedt and Godaux 1977, 1978). In addition, alterations in MU contractile properties due to aging or pathology should lead to changes in MaxRT. Such changes could potentially lead to a decline in muscle performance and clinically observable motor disability (Chan et al. 2001; Gordon et al. 2004).
Traditionally, MU recruitment and rate-coding have been directly investigated by analyzing the discharge behavior of sampled individual MUs using intramuscular EMG (Van Cutsem et al. 1998; Hara et al. 2004; Henneman et al. 1965; Jakobi and Cafarelli 1998; Kanosue et al. 1979; Kukulka and Clamann 1981; De Luca and Erim 1994). While intramuscular EMG is able to provide information regarding the recruitment and de-recruitment thresholds of MUs in the sampled recording vicinity, it has limitations when trying to obtain a global view of the majority of MUs in a muscle. In addition, functional movements in daily life usually require moderate to strong as well as rapid muscle contractions; however, the literature available on MU recruitment under these conditions remains limited due to the technical challenges associated with intramuscular EMG recording. In addition, the use of an invasive procedure usually causes discomfort and increases the possibility of infection, which also impose limitations on the clinical applications of this approach.
MUAPs can be recorded non-invasively from the surface of the skin above the active muscle (surface electromyography, sEMG). The waveform, also called the interference pattern, of the sEMG is generated by the summation and overlapping of the MUAPs from the contracting muscle and, therefore, it is influenced by the number of the active MUs, the discharge rates of the active MUs, and the properties of the active MUs (Sanders et al. 1996). Analysis of the interference pattern of sEMG has been used to assist with clinical neuromuscular diagnosis and to help fatigue monitoring (Fuglsang-Frederiksen 2000; Josef 2001). It has also been shown to be quick, reliable, and feasible in clinical practice (Josef 2001). One of the commonly used sEMG analysis methods, Turns-Amplitude Analysis (TAA), examines the number and amplitude of potential reversals (turns) in the sEMG (Rose and Willison 1967; Willison 1964). This was originally developed to assist with diagnosing the cause of muscle weakness (Willison 1964) and, therefore, TAA is usually used to assist the diagnosis of neuromuscular system disorders (Fuglsang-Frederiksen 2000; Fuglsang-Frederiksen et al. 1976, 1977; Stålberg et al. 1983). However, the potential application of TAA to neuromuscular control research has not been explored.
The aim of this study was to investigate changes in the interference pattern in sEMG, and its relationship with the tendency of MU recruitment during steady-hold and rapid voluntary muscle contractions. The EMG of the TA, BB, and AP muscles was recorded and analyzed using TAA. We hypothesized that since both MU rate-coding and recruitment contribute to the complexity of the interference pattern of the sEMG, changes in the values of the TAA parameters, namely in turns per second and in turn amplitude, relative to muscle forces, should be different at force levels below versus force levels above the completion of MU recruitment (MaxRT). Our results demonstrated that during steady-hold contraction, the number of turns per second in sEMG increased exponentially with force and plateaued after certain force levels, creating a unique Turns per second–force relationship for each muscle. In contrast, the number of turns per second in sEMG had a much slower increase with respect to force during rapid contractions. We next utilized the average slope from the plateau region of the turns per second–force relationship curve to approximate the force level at which the majority of the MUs are recruited. Our results suggested that sEMG with TAA appears to have the potential to help estimate MU recruitment completion force levels, and compared with steady-hold contractions, MU recruitment was completed earlier at lower force level during rapid muscle contractions.
Methods
Subjects
Fifteen healthy adults (eight females and seven males, 22.6 ± 1.5 years old) were recruited to take part in this study. The protocol was approved by the University Institutional Review Board at National Yang-Ming University and the subjects gave their informed consent prior to participation in the experiments. All experimental procedures were performed in accordance with the Declaration of Helsinki.
Experimental setup
EMG recording
Three muscles, the TA, BB, and AP, of the subjects’ dominant side were tested. EMG signals were recorded using fixed-disc electrodes (3 cm inter-disc distance). For the TA muscles, the electrodes were placed on the proximal third of the TA muscle and the ground electrode was placed on the patella. For the BB muscles, the electrodes were placed at the middle part of the muscle belly and the ground electrode was placed at the olecranon process. For the AP muscles, the electrodes were placed on the thenar, proximal to the first metacarpophalangeal joint and the ground electrode was placed on the styloid process. The sEMG signals were amplified (500×), filtered (1–1000 Hz band-pass filter, 6 dB/octave with 60 Hz notch filter) (P511 AC amplifier, Grass Technologies, RI, USA) and digitalized (2000 Hz, CED Power1401 MK II, Cambridge Electronic Design Limited, UK) in real time.
Force recording
The subjects were seated comfortably in a chair. For the TA experiments, the subjects were positioned with 90° hip flexion, 110° knee flexion and ankle in the neutral position. The foot was secured using a customized ankle device with two Velcro stripes, one around the ankle joint and the other 1–2 cm proximal to metatarsophalangeal joint. A heel block was used to prevent sliding of the foot. The ankle dorsiflexion torque was recorded using a force transducer (FT10, Grass Technologies, RI, USA; Maximal working range = 10 kg, Minimal reliable force = 500 mg) attached to the customized ankle device.
For the BB experiments, the subjects’ dominant arm was positioned with 60° shoulder flexion, 90° elbow flexion and forearm full supination. The forearm of the subject was secured using a customized elbow device with two Velcro stripes, one around 1–2 cm distal to elbow joint and the other around 1–2 cm proximal to wrist joint. Elbow flexion torque was recorded using a force transducer (LC201-300, Omega Engineering Inc., USA; load capacity = 300 lb, Output = 2 mV/V nominal, Accuracy = ±1.0 % FSO linearity, hysteresis, repeatability combined) attached to the customized elbow device.
For the AP experiments, the subject’s forearm was supported on a table in the full supinated position. The thumb was positioned in a ring, which was attached to the force transducer (FT10, Grass Technologies, RI, USA; Maximal working range = 10 kg, Minimal reliable force = 500 mg). The thumb dorsiflexion torque was then recorded.
The force signals were amplified (5000×, P511 AC amplifier, Grass Technologies, RI, USA) and then digitalized (1000 Hz, CED Power1401 MK II, Cambridge Electronic Design Limited, UK) in real time.
Experimental procedures
The three muscles were tested in a random order. Subjects were first asked to perform three maximal voluntary contractions (MVCs) with visual feedback of muscle force on the screen and verbal encouragement from the experimenter. There was a 3 min break between each MVC attempt to avoid fatigue. The highest value of the three attempts was chosen to be the subject’s MVC. Two types of isometric muscle contractions were tested. The first was steady-hold contractions and the second was rapid contractions. During steady-hold contractions, the subjects were asked to perform isometric contractions at 10 different force levels (10, 20…100 % MVC with 10 % MVC increment) in a random order. Both visual feedback and verbal cues were given to encourage the subjects to reach the targeted force level and hold for 3 s. During rapid contractions, force levels at 20, 40, 60, and 80 % of the MVC were performed randomly. Subjects were encouraged to reach the targeted force levels as fast as possible and this was followed by immediate relaxation; however, accuracy was not demanded specifically during these rapid contraction trials. There was a thirty-second break between each contraction and a 5 min break between the two types of contraction trials to avoid fatigue.
Data analysis
The sEMG datasets were analyzed offline (Spike 2, Cambridge Electronic Design Limited, UK). TAA parameters, turns per second (T/s) and mean turn amplitude, were calculated for each force level and contraction type for all three muscles. A turn is defined as an independent of the baseline potential reversal that exceeds an established threshold of 100 micro-volt (Rose and Willison 1967). Turn amplitude is the voltage reversal between two consecutive turns and the mean turn amplitude is the average amplitude of the turns (Fig. 1). In total, the T/s and mean turn amplitude were calculated for each of ten different force levels in the steady-hold contraction trials and for four different force levels in the rapid contraction trials.

Surface EMG traces of rapid and steady-hold contractions, as well of examples of turns and turn amplitude in sEMG. a The trace of raw EMG during rapid contractions (above) and steady-hold contraction (below). b A turn is defined as an independent of the baseline potential reversal that exceeds an established threshold of 100 micro-volt (circled). The amplitude is the voltage reversal between two consecutive turns and the mean turn amplitude is the average amplitude of the turns (dotted arrow)
Next, the relationships between TAA parameters and force levels were investigated. T/s and force have a sigmoidal relationship with a rising portion at lower force levels and a plateau after a turning point, whereas mean turn amplitude increases linearly throughout the entire force range (please see the “Results” section for details). On further examination of the turning points of the averaged T/s–force relationships, we found that the force levels at these turning points appeared to near the MaxRTs published previously (Kukulka and Clamann 1981; De Luca and Erim 1994). For steady-hold contractions, the slopes between two consecutive points of the T/s–force relationship curve were calculated, and the average slopes before and after the previously published MaxRTs were compared for all three muscles. The slopes for the T/s–force relationship between steady-hold and rapid contractions at comparable force levels (i.e., 20–40 %, 40–60 %, and 60–80 % MVC) were also calculated and compared.
Statistics
Two-way repeated ANOVA was used to determine the differences in T/s and mean turn amplitude between the steady-hold contractions and the rapid contractions. A post hoc test with Bonferroni correction was used if significance in the main effect was observed. The slopes before and after the turning point and between contraction types were compared using t tests. The alpha level was set at 0.05.
Results
Turns per second
During steady-hold contractions, a sigmoidal relationship between T/s and muscle force was found (Fig. 2). The number of T/s increased dramatically with force during submaximal contractions, and the increment in T/s plateaued after certain force levels and created a “turning point” in the T/s–force relationship. The relationships between T/s and force from the turning point to 100 % MVC were linear for all the muscles tested, with R 2 values at 0.88, 1, and 0.94, for AP, BB, and TA, respectively. Interestingly, the force levels at which the turning point occurred appear to be close to the MaxRTs published previously (AP at 50 % MVC; BB at 88 % MVC; TA at 70 % MVC) (Kukulka and Clamann 1981) (De Luca and Erim 1994).

The relationship between T/s and muscle force during steady-hold contractions. The squares, circles and triangles represent tibialis anterior (TA), and biceps brachii (BB), adductor pollicis (AP), respectively. Please note that the data points for BB and AP at each of the force level were purposefully shifted to the right to avoid overlapping with data points for TA
In contrast, during rapid contractions, the numbers of T/s increased linearly with force from minimal to maximal effort (Fig. 3). The number of T/s during steady-hold contraction was significantly higher than during rapid contractions in the TA muscles at 60 % MVC and 80 % MVC, in the BB muscles at 40 % MVC, 60 % MVC and 80 % MVC and in the AP muscles at 20 % MVC, 40 % MVC, 60 % MVC and 80 % MVC (all p values are <0.05).

The relationship between T/s and muscle force during rapid contractions. The squares, circles and triangles represent tibialis anterior (TA), and biceps brachii (BB), adductor pollicis (AP), respectively. Please note that the data points for TA and AP at each of the force level were purposefully shifted to the right to avoid overlapping with data points for BB
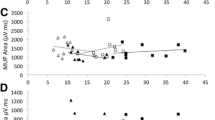
Mean turn amplitude
For all three muscles, the mean turn amplitude increased linearly with the force levels during both steady-hold contractions and rapid contractions. However, the values for the mean turn amplitudes during rapid contractions were higher than those for the mean turn amplitudes during steady-hold contractions. Significant differences were found for the BB muscle at 20 % MVC (p = 0.002) and the AP muscle at 20, 40, and 60 % MVC (p = 0.000, 0.000, and 0.001, respectively).
Slope of T/s–force relationship
We next investigated the slopes of T/s–force relationship and how it changes with MU recruitment. Slopes between two consecutive points of the T/s–force relationship curve were calculated, and the average slopes before and after the MaxRT observed previously were compared for all three muscles. Our results showed that during steady-hold contractions, the slope before the MaxRT was significantly greater than that after the MaxRT for all three muscles (4.0 ± 0.9 and 1.3 ± 0.7 (p = 0.002), 3.1 ± 0.7 and 1.0 ± 0.5 (p = 0.006), and 4.5 ± 2.2 and 0.7 ± 0.7 (p = 0.01) for the TA, BB, and AP muscles, respectively) (Table 1).
We next compared the slopes for the T/s–force relationship between steady-hold and rapid contractions at comparable force levels (i.e., 20–40, 40–60, and 60–80 % MVC) (Table 2). For force level 60–80 % MVC, no difference in slope was observed between steady-hold and rapid contractions for all three muscles tested. However, for 20–40 % MVC in all three muscles (p values from 0.005 to 0.036), and for 40–60 % MVC in TA muscles (p = 0.001), slopes were significantly greater in steady-hold contractions than in rapid contractions.
Because the increment T/s with respect to force appears to plateau at force levels above the completion of MU recruitment and the relationship between T/s and force were quite linear from that force level to 100 % MVC, we next use this linear relationship to see how well the averaged slopes in the plateau region of the T/s–force relationship can help estimate the turning point on the T/s–force relationship curve, and hence the force levels at which the majority of MUs are recruited. The averaged slopes (+SD) were calculated and a threshold value (mean + SD) was determined for each of the three muscles. These threshold values were then used to compare with slopes between two consecutive points on the T/s–force relationship curve for each subject. The comparison started with the slope from the highest force level (90–100 % MVC). If the threshold value was greater than the slope value, the comparison then moved to the next lower force level (80–90 % MVC). The comparison continued until the threshold value was lower than the slope value, and the force level at which the threshold value was reached was considered as the estimated recruitment completion force level. Our results demonstrated that during steady-hold contractions, the average estimated recruitment completion force levels for TA, BB, and AP muscles were 66, 70 and 57 % MVC, respectively (Fig. 4). For rapid muscle contractions, the average estimated recruitment completion force levels for TA, BB, and AP muscles were 29, 24 and 34 % MVC, respectively (Fig. 4). These results indicated a decrease in the recruitment completion level during rapid muscle contractions, which suggests that, compared with steady-hold contractions, motor unit recruitment is completed earlier at lower force levels during rapid contractions.

Average (+SD) force levels at which the majority of MUs are recruited for tibialis anterior (TA), biceps brachii (BB), and adductor pollicis (AP) during steady-hold (left panel) and rapid (right panel) muscle contraction, respectively
Discussion
The current study demonstrated that during steady-hold contraction, the number of turns per second in sEMG increased exponentially with force and plateaued after certain force levels, creating a unique turns per second—force relationship for each muscle. The increment of the number of T/s with respect to muscle force became linear beyond the force level at which the majority of MUs are recruited for all three muscles tested. We utilized this feature to approximate the completion of MU recruitment and demonstrated that compared with steady-hold contractions, MU recruitment is likely completed earlier at lower force levels during rapid contraction for all three muscles.
The relationship between Turns and MU recruitment
A change in the relationship between the number of T/s and muscle force creates a turning point on the T/s–force relationship curve and allows us to determine the force level at which all the MUs in a muscle are recruited. Both MU rate coding and recruitment contribute to the increase in T/s as muscle force increases. When the force output of a muscle reaches its MaxRT, the recruitment of MU, one of the two factors that allows an increase in the number of T/s, ceases to occur. Beyond the MaxRT, rate coding of MUs becomes the only source contributing to any increase in turns in the surface EMG. As a result, the increment in T/s with respect to increment in force plateaus after the MaxRT, which creates a turning point in the T/s–force relationship at the force level where MU recruitment is completed. By comparing the force levels of the turning points in current study with the previously published MaxRTs of the three muscles, we found that the values for both TA and AP muscles were quite close to previous single MU observations: 66 vs. 70 % MVC, and 57 vs. 50 % MVC, respectively (Kukulka and Clamann 1981) (De Luca and Erim 1994). In contrast, for BB muscles, our results showed that the majority of the MUs are recruited at around 71 % MVC, which showed larger difference compared with previously reported at 88 % MVC. Although the completion of recruitment in BB muscles is at ∼88 % MVC, it was also reported that more than 80 % of the motor unit pool is recruited below 60 % MVC. In addition, MUs in BB have been reported to exhibit a decline in recruitment threshold during sustained contractions (Kukulka and Clamann 1981). These factors might play an important role in shifting the estimation of MU recruitment in BB towards lower force levels as observed in the current study.
The T/s of the sEMG was found to be more sensitive when detecting MU recruitment than turn amplitude in our study. Traditionally, the TAA method has been used to differentiate between myogenic and neurogenic lesions in the neuromuscular system without force measurement (Stålberg et al. 1983). It has been reported that myogenic and neurogenic disorders cause a decrease in turn amplitude and T/s, respectively. Since rate coding and recruitment of MUs are the two neural mechanisms for muscle force control, it would be expected that T/s are able to better reflect changes in the neural control strategy during voluntary contraction. Indeed, our observations confirm that from minimal to maximal voluntary contractions, where the neural control mechanism changes from rate-coding and recruitment together before the MaxRT, into rate-coding only beyond MaxRT, the T/s in the sEMG show a dramatic change at the force level when the majority of MUs were recruited. This dramatic change in T/s value creates a turning point in the T/s–force relationship curve and the relationship between T/s and force became quite linear after the turning point. This unique feature enabled us to use averaged slopes from that part of the curve to approximate the completion of MU recruitment in a muscle.
Rapid contractions
Rapid contraction, also called ballistic contraction, is defined as a contraction performed as fast as possible and characterized by a brief contraction time and a high rate of force development, which is then followed by complete muscle relaxation (Van Cutsem et al. 1998; Desmedt and Godaux 1978; Zehr and Sale 1994). Previous rapid contraction studies have focused on the rate coding of MUs and how improvements in rate coding via training affect performance (Van Cutsem et al. 1998; Desmedt and Godaux 1977, 1978; Tsukahara et al. 1995). However, investigations targeting MU recruitment during rapid contractions remain limited. It has been reported that there are about three times as many MUs recruited to produce a given force level during rapid contractions compared to during steady-hold contractions (Desmedt and Godaux 1977, 1978), while others have observed an altered motor unit recruitment order during rapid muscle contractions (Bawa et al. 2014; Holt et al. 2014). In the present study, we have demonstrated that, compared to steady-hold contractions, MU recruitment is likely to be completed much earlier; this was revealed by the decrease in the estimated recruitment completion force level during rapid muscle contraction. The estimated recruitment completion force level of TA muscles during rapid contractions was reduced to about 40 % MVC and the AP and BB muscles showed an even greater reduction in MaxRT to below 20 % MVC.
Earlier completion of MU recruitment could result from a stronger corticospinal drive during rapid muscle contraction. Using Transcranial Magnetic Stimulation, previous studies have found that motor evoked potential amplitudes are greater in the hand and calf muscles during rapid contractions (Carroll et al. 2008; Holl and Zschorlich 2011). Greater excitatory drive from the central nervous system affecting the MU pool would seem to result in greater discharge rates of active MUs (Kernell 1965; De Luca and Erim 1994; Schwindt 1973) and it is likely to promote MU recruitment, as well to achieve strong and fast force output.
Conclusion
Our findings demonstrate that one of the TAA parameters, T/s, can be used to estimate the recruitment completion force levels of different muscles during both steady-hold and rapid muscle contraction. When compared to invasive EMG, surface EMG is more feasible, less expensive and a safer technique. In addition, surface EMG is easier to apply during strong and rapid muscle contractions. Application of this technique could include measuring changes in MU recruitment in respond to exercise, training, rehabilitation intervention, fatigue, and the presence of disease. Future research using EMG simulation with realistic motor unit model could help validate the experimental findings observed in the current study, as well as help better understand the influence of muscle’s physiological characteristics, such as fiber/motor unit type composition, motor unit number, on the changes in sEMG interference pattern and the predictability of MU recruitment completion in a muscle.
Abbreviations
- AP:
-
Adductor pollicis
- BB:
-
Biceps brachii
- EMG:
-
Electromyography
- MaxRT:
-
Maximal recruitment threshold
- MU:
-
Motor unit
- MUAP:
-
Motor unit action potential
- MVC:
-
Maximal voluntary contraction
- sEMG:
-
Surface electromyography
- T/s:
-
Turns per second
- TA:
-
Tibialis anterior
- TAA:
-
Turns-Amplitude Analysis
References
Adrian ED, Bronk DW (1929) The discharge of impulses in motor nerve fibres: part II. The frequency of discharge in reflex and voluntary contractions. J Physiol (Lond) 67:i3–151
Bawa PNS, Jones KE, Stein RB (2014) Assessment of size ordered recruitment. Front Hum Neurosci 8:532
Carroll TJ, Lee M, Hsu M, Sayde J (2008) Unilateral practice of a ballistic movement causes bilateral increases in performance and corticospinal excitability. J Appl Physiol 104:1656–1664
Chan KM, Doherty TJ, Brown WF (2001) Contractile properties of human motor units in health, aging, and disease. Muscle Nerve 24:1113–1133
Clamann HP (1993) Motor unit recruitment and the gradation of muscle force. Phys Ther 73:830–843
De Luca CJ, Erim Z (1994) Common drive of motor units in regulation of muscle force. Trends Neurosci 17:299–305
De Luca CJ, LeFever RS, McCue MP, Xenakis AP (1982) Behaviour of human motor units in different muscles during linearly varying contractions. J Physiol (Lond) 329:113–128
Desmedt JE, Godaux E (1977) Ballistic contractions in man: characteristic recruitment pattern of single motor units of the tibialis anterior muscle. J Physiol (Lond) 264:673–693
Desmedt JE, Godaux E (1978) Ballistic contractions in fast or slow human muscles: discharge patterns of single motor units. J. Physiol. (Lond.) 285:185–196
Duchateau J, Enoka RM (2011) Human motor unit recordings: origins and insight into the integrated motor system. Brain Res 1409:42–61
Esposito F, Cè E, Gobbo M, Veicsteinas A, Orizio C (2005) Surface EMG and mechanomyogram disclose isokinetic training effects on quadriceps muscle in elderly people. Eur J Appl Physiol 94:549–557
Fuglsang-Frederiksen A (2000) The utility of interference pattern analysis. Muscle Nerve 23:18–36
Fuglsang-Frederiksen A, Scheel U, Buchthal F (1976) Diagnostic yield of analysis of the pattern of electrical activity and of individual motor unit potentials in myopathy. J Neurol Neurosurg Psychiatr 39:742–750
Fuglsang-Frederiksen A, Scheel U, Buchthal F (1977) Diagnostic yield of the analysis of the pattern of electrical activity of muscle and of individual motor unit potentials in neurogenic involvement. J. Neurol. Neurosurg. Psychiatr. 40:544–554
Gobbo M, Cè E, Diemont B, Esposito F, Orizio C (2006) Torque and surface mechanomyogram parallel reduction during fatiguing stimulation in human muscles. Eur J Appl Physiol 97:9–15
Gordon T, Thomas CK, Munson JB, Stein RB (2004) The resilience of the size principle in the organization of motor unit properties in normal and reinnervated adult skeletal muscles. Can J Physiol Pharmacol 82:645–661
Hara Y, Masakado Y, Chino N (2004) The physiological functional loss of single thenar motor units in the stroke patients: when does it occur? Does it progress? Clin Neurophysiol 115:97–103
Heckman CJ, Enoka RM (2012) Motor unit. Compr Physiol 2:2629–2682
Henneman E, Somjen G, Carpenter DO (1965) Functional significance of cell size in spinal motoneurons. J Neurophysiol 28:560–580
Holl N, Zschorlich V (2011) Neural control of joint stability during a ballistic force production task. Exp Brain Res 210:229–242
Holt NC, Wakeling JM, Biewener AA (2014) The effect of fast and slow motor unit activation on whole-muscle mechanical performance: the size principle may not pose a mechanical paradox. Proc Biol Sci 281:20140002
Jakobi JM, Cafarelli E (1998) Neuromuscular Drive and Force Production Are Not Altered During Bilateral Contractions. J Appl Physiol 84:200–206
Josef F (2001) EMG-interference pattern analysis. J Electromyogr Kinesiol 11:231–246
Kernell D (1965) The Adaptation and the Relation between Discharge Frequency and Current Strength of Cat Lumbosacral Motoneurones Stimulated by Long-Lasting Injected Currents. Acta Physiol Scand 65:65–73
Kukulka CG, Clamann HP (1981) Comparison of the recruitment and discharge properties of motor units in human brachial biceps and adductor pollicis during isometric contractions. Brain Res 219:45–55
Orizio C, Esposito F, Veicsteinas A (1994) Effect of acclimatization to high altitude (5,050 m) on motor unit activation pattern and muscle performance. J Appl Physiol 77:2840–2844
Rose AL, Willison RG (1967) Quantitative electromyography using automatic analysis: studies in healthy subjects and patients with primary muscle disease. J Neurol Neurosurg Psychiatr 30:403–410
Sanders DB, Stålberg EV, Nandedkar SD (1996) Analysis of the electromyographic interference pattern. J Clin Neurophysiol 13:385–400
Schwindt PC (1973) Membrane-potential trajectories underlying motoneuron rhythmic firing at high rates. J Neurophysiol 36:434–439
Stålberg E, Chu J, Bril V, Nandedkar S, Stålberg S, Ericsson M (1983) Automatic analysis of the EMG interference pattern. Electroencephalogr Clin Neurophysiol 56:672–681
Tsukahara R, Aoki H, Yabe K, Mano T (1995) Effects of premotion silent period on single motor unit firing at initiation of a rapid contraction. Electroencephalogr Clin Neurophysiol 97:223–230
Van Cutsem MV, Duchateau J, Hainaut K (1998) Changes in single motor unit behaviour contribute to the increase in contraction speed after dynamic training in humans. J Physiol 513:295–305
Willison RG (1964) Analysis of electrical activity in healthy and dystrophic muscle in man. J Neurol Neurosurg Psychiatr 27:386–394
Zehr EP, Sale DG (1994) Ballistic movement: muscle activation and neuromuscular adaptation. Can J Appl Physiol 19:363–378
Acknowledgments
This work was supported by the Ministry of Science and Technology of Taiwan (NSC 100-2314-B-010-003).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Nicolas Place.
Part of this work was presented as a conference poster at ISEK2012.
Rights and permissions
About this article

Cite this article
Pan, LL., Yu, CH., Tsai, MW. et al. Estimating the tendency of motor unit recruitment during steady-hold and rapid contractions using surface EMG and Turns-amplitude analysis. Eur J Appl Physiol 115, 2407–2414 (2015). https://doi.org/10.1007/s00421-015-3223-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00421-015-3223-8