
Abstract
In mechanical industry, most mechanical systems contain lubrication clearance joints. Consequently, to analyze the dynamic response errors and accuracy reliability for mechanisms with lubrication clearance joints is very necessary. So far majority studies have focused on kinematic accuracy reliability for mechanism, but few on dynamic response errors and accuracy reliability. Moreover, the only studies on dynamic accuracy reliability mainly focus on mechanisms with dry contact clearance joint, while the studies on dynamic accuracy reliability for mechanisms with lubrication clearance joint are very few. This paper presents an analysis method of dynamic response errors and accuracy reliability for mechanism with lubrication clearance joints. Firstly, the lubrication clearance joint model and dry contact clearance joint model are established, respectively. The dynamic model of nine-bar mechanism with multiple lubrication clearance joints is developed according to Lagrangian multiplier method. And then, the dynamic accuracy reliability model for mechanism is derived by first-order second-moment method. Finally, the influences of lubrication clearance and dry contact clearance on dynamic response errors and accuracy reliability for mechanism are compared and analyzed at different driving speeds. And the influences of dynamic viscosity and clearance values on dynamic response errors and accuracy reliability for mechanism with lubrication clearance joints are researched. This research offers the theory foundation for design of reliability for mechanism.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The reliability of mechanism refers to its ability to keep the allowable output accuracy during operation, that is, the probability that the output dynamic response errors are within the allowable error range [1,2,3]. However, the appearance of kinematic pair clearances has significant impacts on dynamic response and accuracy reliability for mechanism. So as to eliminate the impacts of the kinematic pair clearances on kinematic accuracy of mechanism, the kinematic pair clearances are usually filled with lubricating oil. Lubricating oil not only makes mechanism have better performance, but also improves the carrying capacity and dynamic accuracy reliability for mechanism [4,5,6]. Along with the increasing requirements for performance and accuracy of mechanism, it is of great significance to establish a reasonable reliability model to analyze and predict the dynamic accuracy reliability for mechanism with lubrication clearance joints.
In the last few years, some scholars have conducted many studies on reliability of mechanism. However, most of them focus on kinematic accuracy reliability, while studies on dynamic response errors and accuracy reliability are few. Zhang et al. [7] established structural deviation model and kinematic accuracy model to research the effect of clearance on reliability of mechanisms. Geng et al. [8] conceived a novel analysis method of kinematic accuracy reliability of non-uniform wear clearance according to non-probabilistic interval interference model. Xiao et al. [9] used MC method to discuss the time-varying reliability of BDC press. Zhang et al. [10] analyzed kinematic accuracy reliability and sensitivity of mechanism by truncated and correlated normal variables, which was applied to four-bar mechanism. Zhang et al. [11] established a kinematic accuracy reliability model of robot mechanism considering the random size and the angle of joint. Wang et al. [12] proposed an approximate model with high accuracy to analyze kinematic accuracy reliability of steering mechanism. Wu et al. [13] presented a model of kinematic accuracy reliability of four-bar bistable compliant mechanisms considering degradation and uncertainty. Qui et al. [14] put forward a design model of kinematic accuracy reliability and applied to four-bar mechanism based on axiomatic theory. Zhan et al. [15] presented a model of kinematic accuracy reliability of parallel robots with clearance joint. Xu. [16] analyzed kinematic accuracy reliability of delta mechanism by MC method. Zhang et al. [17] considered the uncertainty of random clearance to estimate kinematic accuracy of the four-bar function generation mechanism. Wang et al. [18] raised kinematic accuracy reliability of four-bar mechanism by first-passage method.
At present, the only research mainly focuses on dynamic accuracy reliability of mechanisms with dry contact clearance joint, while rarely on dynamic accuracy reliability of mechanisms with lubrication clearance joints. Gao et al. [19] conducted dynamic accuracy reliability of mechanism considering dry contact clearance joint according to the Monte Carlo and Kriging method. Wu et al. [20] presented a probabilistic model to evaluate dynamic accuracy reliability of mechanism considering dry contact clearance. Zhuang et al. [21] studied dynamic accuracy reliability of wear mechanism with dry contact clearance joint considering time-varying parameters based on Monte Carlo method. Li et al. [22] set up dynamic accuracy reliability model of space deployment mechanism and analyzed the impacts of dry contact clearances and geometric parameters of mechanical reliability. Pandey et al. [23] presented a new way to count the reliability of manipulator with dry contact clearances according to maximum entropy principle. Lai et al. [24] researched a new Monte Carlo simulation method and considered comprehensively the influence of geometric size and clearances on reliability of mechanism with dry contact clearances. Lara-Molina et al. [25] proposed reliability design for series and parallel robots and discussed the impact of dry contact clearances on accuracy of manipulator. Chen et al. [26] discussed the impacts of clearance values and driving speeds on dynamic accuracy of mechanism with dry contact clearances. Li et al. [27] researched the impact of errors of revolving joint clearance and the spherical joint clearance on reliability of delta parallel robot. Sun et al. [28] conducted a method to increase dynamic accuracy reliability of mechanisms with dry contact clearances and applied to crank-slider mechanism. Zhang et al. [29] presented a new model for mechanism’s reliability analysis with dry contact clearances.
To sum up, most of the studies on reliability focus on kinematic accuracy reliability of mechanism, while studies on dynamic response errors and accuracy reliability are few. Moreover, the only studies on dynamic accuracy reliability usually focus on dry contact clearance joint, but the studies on dynamic accuracy reliability of multiple lubrication clearance joints are very few. Thus, in order to analyze the influences of lubrication clearance joints on dynamic response errors and accuracy reliability for mechanisms, this paper presents an analysis method of dynamic response errors and accuracy reliability for mechanism with lubrication clearance joints. Taking the 2-DOF nine-bar mechanism as a research object, the dynamic model and dynamic accuracy reliability model are derived, and the dynamic response errors and accuracy reliability of multi-link mechanism with multiple lubrication clearance joints are researched. The impacts of lubrication clearances and dry contact clearances on dynamic response errors and accuracy reliability for mechanism at different driving speeds are compared and analyzed. And the impacts of dynamic viscosity and clearance values on dynamic response errors and accuracy reliability for mechanism are researched.
2 Dynamic modeling of multibody system
2.1 Establishment of lubrication clearance model
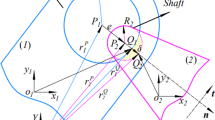
In multi-link mechanism, due to various reasons, there will inevitably be clearance between kinematic pairs, which will cause instability and uncertainty on operation of mechanism. In order to intuitively represent the geometric position relationship of each element in kinematic pairs, the lubrication clearance model of rotating pair is shown in Fig. 1.

Lubrication clearance model
According to Fig. 1, components B and S are bearing and shaft, which are sealed and full of lubricating oil. RB and RS are radii of both. OB and OS are center positions of bearing and shaft, respectively. Therefore, eccentricity vector of both is
Eccentricity ratio ε describes the degree of deviation between bearing and shaft, and its expression is
where \(c_{{\text{r}}} = R_{{\text{B}}} - R_{{\text{S}}}\).
Deflection angle γ is direction of eccentricity vector in global coordinate system, and its expression is
where ex and ey are component of eccentric vector in X and Y direction.
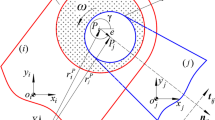
2.2 Establishment of dry contact clearance model
The existence of clearance will cause relative movement in kinematic pair, resulting in contact, collision, and separation. When collision occurs, contact force will be generated between bearing and shaft. The dry contact clearance model of rotating pair is shown in Fig. 2.

Dry contact clearance model
The normal contact force adopts the Lancarani-Nikravesh model [30], which is modified on basis of Herz model, taking into account the elastic deformation and energy dissipation of the collision in kinematic pair.
In Fig. 2, embedded depth is
Normal contact force is
where ce represents coefficient of restitution, \(\dot{\delta }_{0}\) represents initial contact velocity, \(\dot{\delta }_{{\text{r}}}\) represents relative collision velocity, K represents stiffness coefficient, which is shown as
where \(\delta_{{\text{B}}} = \left( {1 - v_{{\text{B}}}^{2} } \right)/E_{{\text{B}}} ,\delta_{{\text{S}}} = \left( {1 - v_{{\text{S}}}^{2} } \right)/E_{{\text{S}}}\), vB and vS are Poisson’s ratio, EB and ES are elastic modulus.
The existence of clearance will cause relative tangential movement between bearing and shaft, resulting in tangential friction. Modified Coulomb friction model [31] is used to describe the role of friction in kinematic pairs. Dynamic correction coefficient is adopted, which will more accurately describe the friction phenomenon in clearance elements and the viscosity phenomenon at low speed. Its expression is
where cN is dynamic correction coefficient, cf is friction coefficient, v0 and vp are limit velocities of static and dynamic friction.
In conclusion, the dry contact force is
2.3 Establishment of oil-film bearing force model
Oil-film bearing force is generated through the lubricating oil accumulation in lubrication clearance joint, which balances the external load, can effectively reduce friction and collision between kinematic pair elements, and improve the operation accuracy of mechanism. Pinkus-Sternlicht model [32] considering the oil-film effects of wedge-shaped and squeeze, an isothermal Reynolds equation suitable for dynamic load bearings is given, which is shown as
where P represents oil-film pressure, μ represents lubricating viscosity, h represents oil-film thickness, U represents relative tangential velocity, X and Z represent radial and axial directions.
Pinkus and Sternlicht based on Gümbel boundary condition, deduced the oil-film bearing force suitable for planar multibody system with dynamic load. Gümbel boundary condition describes the dynamic oil-film more accurately and can better analyze bearing capacity of system. When \(\dot{\varepsilon } \ge 0\), which is shown as
When \(\dot{\varepsilon } < 0\), which is shown as
k is shown as
where Flr and Flt are normal and tangential oil-film bearing forces, L means bearing width, \(\dot{\varepsilon }\) means radial velocity, \(\dot{\gamma }\) means the first derivative of deflection angle γ to time, ω is relative angular velocity.
However, Pinkus-Sternlicht oil-film bearing force model has defects. When eccentricity ratio tends to 0, the calculation of oil-film bearing forces becomes inaccurate. Therefore, correction factor λ is used to improve this defect. Modified Pinkus-Sternlicht model is
In global coordinate system, the oil-film bearing force is
In order to more truly reflect the transformation between lubrication state and dry contact state, this paper adopts the transition force model [33] to ensure the accuracy of numerical calculation in the transition process. Transition force model is shown in Fig. 3.
where e1 is the tolerance of eccentricity.

Transition force model
2.4 Dynamic model of mechanism
Structure of 2-DOF nine-bar mechanism is shown in Fig. 4. The mechanism is composed of the framework 9 and 8 movable members, including cranks 1and 2, connecting robs 3, 4 and 5, triangular plate 6, connecting rob 7 and slider 8. The DOF of mechanism is 2, and mechanism is driven cranks 1 and 2 by two motors, respectively. Thus, the mechanism has definite motion. Cranks 1 and 2 are connected with connecting rods 3 and 4 through revolute pair C1 and revolute pair C2, respectively. Cranks 1 and 2 are directly driven by motor. So, the lubrication clearance at rotating pair C1 and rotating pair C2 is considered, which can better reflect the impacts of lubrication clearance on operating accuracy of mechanism. Dynamic model is established by Lagrangian multiplier method.

Structure of 2-DOF nine-bar mechanism
The component coordinates are shown by centroid coordinate method, which are shown as
Displacement constraint equation of lubrication clearances C1 and C2 can be expressed as
Velocity constraint equation can be expressed as
where Φq represents Jacobian equation, \(\dot{q}\) represents generalized velocity vector, Φt represents time derivative of Eq. (21).
Acceleration constraint equation can be expressed as
where \(\ddot{q}\) represents generalized acceleration vector, \(\Phi_{tt} = 0_{20 \times 1} ,\Phi_{qt} = 0_{20 \times 24}\).
Dynamic equation with Lagrangian multiplier λ is
where α and β are correction factors, which improve the stability of the algorithm, M is mass matrix, g is external force, \(\dot{\Phi } = \frac{{{\text{d}}\Phi }}{{{\text{d}}t}}\).
3 Modeling and solving of dynamic accuracy reliability
3.1 Establishment of model
A reasonable reliability model can analyze and predict performance and accuracy of mechanism operation. The paper establishes dynamic accuracy reliability model by first-order second-moment method. Assuming that actual and allowable errors obey normal distribution, according to strength-stress interference theory, the reliability is obtained by the errors.
where I is allowable errors and represents strength, and i is actual errors and represents stress. Based on nature of normal distribution, α also obeys normal distribution.
where \(\mu_{\alpha } = \mu_{I} - \mu_{i} ,\sigma_{\alpha } = \sqrt {\sigma_{I}^{2} + \sigma_{i}^{2} }\). Among them, μI and μi are mean of allowable and actual errors, and σI and σi are standard deviation of allowable and actual errors.
Then the reliability R is
let \(\zeta = \frac{{\alpha - \mu_{\alpha } }}{{\sigma_{\alpha } }},\beta = \frac{{\mu_{\alpha } }}{{\sigma_{\alpha } }} = \frac{{\mu_{I} - \mu_{i} }}{{\sqrt {\sigma_{I}^{2} + \sigma_{i}^{2} } }}\), the standard normal distribution of reliability R is expressed as
Therefore, the reliability R can be obtained by errors of the end effector slider.
3.2 Solving process of model
Firstly, according to initial conditions, the dynamic equation of system is solved by fourth-order Runge–Kutta method. And the output dynamic response errors of mechanism are obtained. Secondly, the allowable output errors are determined according to engineering practice and output response of mechanism. Finally, the reliability indexes and reliability of mechanism are obtained by dynamic accuracy reliability model. Flow chart of solution is shown in Fig. 5.

Flow chart of solution
4 Dynamic response errors analysis for mechanism considering multiple lubrication clearance joints
This chapter compares the impacts of lubrication clearance and dry contact clearance on dynamic response errors for mechanism at different driving speeds. The impacts of dynamic viscosity and clearance values on dynamic response errors for mechanism are analyzed. Geometric parameters of each component are represented in Table 1. Simulation parameters of mechanism are represented in Table 2.
4.1 Impacts of dry contact clearance and lubrication clearance on dynamic response errors for mechanism
This section analyzes the impacts of dry contact clearance and lubrication clearance on dynamic response errors for mechanism at different driving speeds. Through dynamic response of mechanisms with different clearance models and dynamic response of ideal mechanisms, the dynamic response errors of two models are obtained. The models consider that the mechanism has revolute clearances C1 and C2, and clearance value is 0.5 mm. Viscosity of lubricating oil (40°) is 100 cp. Crank driving speeds of mechanism are \(\omega_{1} = - 3\pi \,{{{\text{rad}}} \mathord{\left/ {\vphantom {{{\text{rad}}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}}\) and \(\omega_{2} = 3\pi \,{{{\text{rad}}} \mathord{\left/ {\vphantom {{{\text{rad}}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}}\). The displacement, velocity, acceleration error curves of slider for mechanism are shown in Figs. 6, 7 and 8.

Displacement error of slider

Velocity error of slider

Acceleration error of slider
It can be seen from Fig. 6 that the displacement error curves of two models basically coincide. In dry contact model, the displacement error of slider is the range of [\(- 4.047 \times 10^{ - 3} \,{\text{m}},7.72 \times 10^{ - 4} \,{\text{m}}\)]. In lubrication model, the displacement error of slider is the range of [\(- 4.097 \times 10^{ - 3} \,{\text{m}},6.802 \times 10^{ - 4} \,{\text{m}}\)]. As can be seen from Fig. 7, the velocity error of slider is the range of [\(- 0.2039\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}},0.2427\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}}\)] in dry contact model, and error peak appears at 0.3183 s. In lubrication model, the velocity error of slider is the range of [\(- 0.1229\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}},0.1385\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}}\)], and error peak appears at 0.3255 s. As can be seen from Fig. 8, the acceleration error of slider is the range of [\(- 365\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {{\text{s}}^{2} }}} \right. \kern-\nulldelimiterspace} {{\text{s}}^{2} }},576\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {{\text{s}}^{2} }}} \right. \kern-\nulldelimiterspace} {{\text{s}}^{2} }}\)] in dry contact model, and error peak appears at 0.4647 s. In lubrication model, the acceleration error of slider is the range of [\(- 14.01\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {{\text{s}}^{2} }}} \right. \kern-\nulldelimiterspace} {{\text{s}}^{2} }},24.01{{\,{\text{m}}} \mathord{\left/ {\vphantom {{\,{\text{m}}} {{\text{s}}^{2} }}} \right. \kern-\nulldelimiterspace} {{\text{s}}^{2} }}\)], and error peak appears at 0.4678 s.
Crank driving speeds of mechanism are \(\omega_{1} = - 5\pi \,{{{\text{rad}}} \mathord{\left/ {\vphantom {{{\text{rad}}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}}\) and \(\omega_{2} = 5\pi \,{{{\text{rad}}} \mathord{\left/ {\vphantom {{{\text{rad}}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}}\). Viscosity of lubricating oil (40°) is 100 cp.The models consider that the mechanism has revolute clearances C1 and C2, and clearance value is 0.5 mm. The displacement, velocity, acceleration error curves of slider for mechanism are shown in Figs. 9, 10 and 11.

Displacement error of slider

Velocity error of slider

Acceleration error of slider
It can be seen from Fig. 9 that the displacement error curves of two models basically coincide. In dry contact model, the displacement error of slider is the range of [\(- 3.444 \times 10^{ - 3} \,{\text{m}},7.966 \times 10^{ - 4} \,{\text{m}}\)]. In lubrication model, the displacement error of slider is the range of [\(- 3.449 \times 10^{ - 3} \,{\text{m}},7.691 \times 10^{ - 4} \,{\text{m}}\)]. The displacement error peaks of two models appear at 0.1595 s. As can be seen from Fig. 10, the velocity error of slider is the range of [\(- 0.3324\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}},0.3054\,{{\text{m}} \mathord{\left/ {\vphantom {{\text{m}} {\text{s}}}} \right. \kern-\nulldelimiterspace} {\text{s}}}\)] in dry contact model, and error peak appears at 0.283 s. In lubrication model, the velocity error of slider is the range of [\(- 0.2114\,{\text{m/s}},0.1911\;{\text{m/s}}\)], and error peak appears at 0.2834 s. As can be seen from Fig. 11, the acceleration error of slider is the range of [\(- 581.8\;{\text{m/s}}^{2} ,1386\;{\text{m/s}}^{2}\)] in dry contact model, and error peak appears at 0.2838 s. In lubrication model, the acceleration error of slider is the range of [\(- 42.8\,{\text{m/s}}^{2} ,107.6\,{\text{m/s}}^{2}\)], and error peak appears at 0.287 s.
In conclusion, compared with dry contact model, lubrication model has a smaller displacement error, velocity error, acceleration error peak and fluctuation degree, and acceleration error is more obvious. Lubrication model can effectively reduce the operating errors and improve the stability and precision of mechanism. In addition, lower driving speed can reduce dynamic response errors for mechanism.
4.2 Impacts of viscosity of lubricating oil on dynamic response errors for mechanism
Viscosity of lubricating oil is an important index to evaluate lubrication ability and an important parameter of lubrication clearance model. This section analyzes the impacts of viscosity of lubricating oil of 100 cp, 200 cp and 400 cp on dynamic response errors for mechanism with lubrication clearance joints. The lubrication clearance model considers that the mechanism has revolute clearances C1 and C2, and clearance value is 0.5 mm. Crank driving speeds of mechanism are \(\omega_{1} = - 3\pi \,{\text{rad/s}}\) and \(\omega_{2} = 3\pi \;{\text{rad/s}}\). The displacement, velocity, acceleration error curves of slider for mechanism are shown in Figs. 12, 13 and 14.

Displacement error of slider

Velocity error of slider

Acceleration error of slider
It can be seen from Fig. 12 that displacement error curves of slider basically coincide when viscosity of lubricating oil is 100 cp, 200 cp, 400 cp, and their displacement errors of slider are the range of [\(- 4.097 \times 10^{ - 3} \,{\text{m}},6.802 \times 10^{ - 4} \,{\text{m}}\)], [\(- 4.018 \times 10^{ - 3} \,{\text{m}},6.222 \times 10^{ - 4} \,{\text{m}}\)], [\(- 3.892 \times 10^{ - 3} \,{\text{m}},5.274 \times 10^{ - 4} \,{\text{m}}\)], respectively. As can be seen from Fig. 13, when viscosity of lubricating oil is 100 cp, 200 cp, 400 cp, their velocity errors of slider are the range of [\(- 0.1229\;{\text{m/s}},0.1386\;{\text{m/s}}\)], [\(- 0.09714\;{\text{m/s}},0.1037\;{\text{m/s}}\)], [\(- 0.06477\;{\text{m/s}},0.06576\;{\text{m/s}}\)], and error peaks appear at 0.3254 s, 0.3263 s, 0.3279 s, respectively. As can be seen from Fig. 14, when viscosity of lubricating oil is 100 cp, 200 cp, 400 cp, their acceleration errors of slider are the range of [\(- 14.01\;{\text{m/s}}^{2} ,24.01\;{\text{m/s}}^{2}\)], [\(- 4.82\,\;{\text{m/s}}^{2} ,11.25\;{\text{m/s}}^{2}\)], [\(- 1.504\;{\text{m/s}}^{2} ,6.338\;{\text{m/s}}^{2}\)], and error peaks appear at 0.4678 s, 0.4663 s, 0.4657, respectively. The results show that output errors of slider decrease with increase of dynamic viscosity of lubricating oil. The increase of dynamic viscosity of lubricating oil can reduce the output errors of mechanism and increase the operation accuracy.
4.3 Impacts of clearance values on dynamic response errors for mechanism
Clearance value is a significant factor affecting operation of mechanism. This section analyzes the impacts of clearance values of 0.3 mm, 0.5 mm and 0.7 mm on dynamic response errors for mechanism. The lubrication clearance model considers that the mechanism has revolute clearances C1 and C2. Crank driving speeds of mechanism are \(\omega_{1} = - 3\pi \,{\text{rad/s}}\) and \(\omega_{2} = 3\pi \,{\text{rad/s}}\). Viscosity of lubricating oil (40°) is 100 cp. The displacement, velocity, acceleration error curves of slider for mechanism are shown in Figs. 15, 16 and 17.

Displacement error of slider

Velocity error of slider

Acceleration error of slider
It can be seen from Fig. 15 that when clearance value is 0.3 mm, 0.5 mm, 0.7 mm, their displacement errors of slider are the range of [\(- 3.496 \times 10^{ - 3} \,{\text{m}}, - 1.617 \times 10^{ - 4} \,{\text{m}}\)], [\(- 4.097 \times 10^{ - 3} \,{\text{m}},6.802 \times 10^{ - 4} \,{\text{m}}\)], [\(- 4.832 \times 10^{ - 3} \,{\text{m}},1.58 \times 10^{ - 3} \,{\text{m}}\)], and error peaks appear at 0.3042 s, 0.2927 s, 0.2915 s, respectively. As can be seen from Fig. 16, when clearance value is 0.3 mm, 0.5 mm, 0.7 mm, their velocity errors of slider are the range of [\(- 0.04091\,{\text{m/s}},0.04001\,{\text{m/s}}\)], [\(- 0.1229\,{\text{m/s}},0.1385\,{\text{m/s}}\)], [\(- 0.1834\,{\text{m/s}},0.2430\,{\text{m/s}}\)], and error peaks appear at 0.4557 s, 0.3255 s, 0.3289 s, respectively. As can be seen from Fig. 17, when clearance value is 0.3 mm, 0.5 mm, 0.7 mm, their acceleration errors of slider are the range of [\(- 1.532\,{\text{m/s}}^{2} ,5.624\,{\text{m/s}}^{2}\)], [\(- 14.01\,{\text{m/s}}^{2} ,24.01\,{\text{m/s}}^{2}\)], [\(- 64.92\,{\text{m/s}}^{2} ,100.5\,{\text{m/s}}^{2}\)], and error peaks appear at 0.4616 s, 0.4678 s, 0.4703 s, respectively. The results show that output errors of slider increase with the increase of clearance value, especially the increase of acceleration. With the increase of clearance value, operation accuracy and stability of mechanism decrease.
5 Dynamic accuracy reliability analysis for mechanism considering multiple lubrication clearance joints
This chapter compares the impacts of lubrication clearance and dry contact clearance on dynamic accuracy reliability for mechanism at different driving speeds, analyzing the impacts of dynamic viscosity and clearance values on dynamic accuracy reliability for mechanism.
According to engineering practice and dynamic response for the mechanism, the mean and standard deviation of allowable errors of displacement, velocity and acceleration of slider are determined as 0.012 m, 0.004 m, 0.3 m/s, 0.1 m/s, 18 m/s2 and 6 m/s2.
5.1 Impacts of dry contact clearance and lubrication clearance on dynamic accuracy reliability for mechanism
This section analyzes the impacts of dry contact clearance and lubrication clearance on dynamic accuracy reliability for mechanism at different driving speeds. Through allowable errors for mechanism and output response errors of different clearance models, the dynamic accuracy reliability of two models is obtained. The models consider that the mechanism has revolute clearances C1 and C2, and clearance value is 0.5 mm. Viscosity of lubricating oil (40°) is 100 cp. Crank driving speeds of mechanism are \(\omega_{1} = - 3\pi \,{\text{rad/s}}\) and \(\omega_{2} = 3\pi \,{\text{rad/s}}\). The displacement, velocity, acceleration reliability indexes and their reliability are shown in Figs. 18, 19, 20, 21, 22 and 23.

Displacement reliability index

Displacement reliability

Velocity reliability index

Velocity reliability

Acceleration reliability index

Acceleration reliability
As shown in Figs. 18 and 19, when the crank angle is 162°, the displacement reliability indexes of dry contact model and lubrication model are the lowest, which are 2.021 and 2.014, respectively, and corresponding reliability is 0.9784 and 0.9780. As can be seen from Figs. 20 and 21, when the crank angle is 180°, the velocity reliability indexes of dry contact model and lubrication model are the lowest, which are 1.614 and 2.013, respectively, and corresponding reliability is 0.9464 and 0.9780. According to Figs. 22 and 23, when the crank angle is 270°, the acceleration reliability indexes of dry contact model and lubrication model are the lowest, which are -0.1706 and 1.675, respectively, and corresponding reliability is 0.4325 and 0.9530.
Crank driving speeds of mechanism are \(\omega_{1} = - 5\pi \,{\text{rad/s}}\) and \(\omega_{2} = 5\pi \,{\text{rad/s}}\). Viscosity of lubricating oil (40°) is 100 cp.The models consider that the mechanism has revolute clearances C1 and C2, and clearance value is 0.5 mm. The displacement, velocity, acceleration reliability indexes and their reliability are shown in Figs. 24, 25, 26, 27, 28 and 29.

Displacement reliability index

Displacement reliability

Velocity reliability index

Velocity reliability

Acceleration reliability index

Acceleration reliability
As shown in Figs. 24 and 25, when the crank angle is 162°, the displacement reliability index of lubrication model is the lowest, which is 2.213, and corresponding reliability is 0.9865. When the crank angle is 144°, the displacement reliability index of dry contact model is the lowest, which is 2.214, and corresponding reliability is 0.9866. As can be seen from Figs. 26 and 27, when the crank angle is 270°, the velocity reliability index of lubrication model is the lowest, which is 1.710, and corresponding reliability is 0.9564. When the crank angle is 162°, the velocity reliability index of dry contact model is the lowest, which is 1.172, and corresponding reliability is 0.8581. According to Figs. 28 and 29, when the crank angle is 270°, the acceleration reliability index of lubrication model is the lowest, which is 0.08237, and corresponding reliability is 0.5329. When the crank angle is 180°, the acceleration reliability index of dry contact model is the lowest, which is − 0.7213, and corresponding reliability is 0.2358. The analysis shows that lubrication model has higher reliability indexes and reliability than dry contact model, especially acceleration reliability of mechanism. Lubrication model can improve the adverse impacts of clearance on mechanism and improve the reliability of mechanism. In addition, lower driving speed can enhance the reliability of mechanism.
5.2 Impacts of viscosity of lubricating oil on dynamic accuracy reliability for mechanism
This section analyzes the impacts of viscosity of lubricating oil of 100 cp, 200 cp and 400 cp on dynamic accuracy reliability for mechanism with lubrication clearance joints. Through the output response errors of different viscosity of lubricating oil for mechanism and the allowable errors for mechanism, dynamic accuracy reliability is obtained. The lubrication clearance model considers that the mechanism has revolute clearances C1 and C2, and clearance value is 0.5 mm. Crank driving speeds of mechanism are \(\omega_{1} = - 3\pi \,{\text{rad/s}}\) and \(\omega_{2} = 3\pi \,{\text{rad/s}}\). The displacement, velocity, acceleration reliability indexes and their reliability are shown in Figs. 30, 31, 32, 33, 34 and 35.

Displacement reliability index

Displacement reliability

Velocity reliability index

Velocity reliability

Acceleration reliability index

Acceleration reliability
As shown in Figs. 30 and 31, when the crank angle is 162°, the displacement reliability indexes of three viscosity of lubricating oil are the lowest, which are 2.014, 2.043 and 2.091, respectively, and corresponding reliability is 0.9780, 0.9795 and 0.9817. As can be seen from Figs. 32 and 33, when the crank angle is 180°, the velocity reliability indexes with viscosity of lubricating oil of 100 cp and 200 cp are the lowest, which are 2.013 and 2.263, respectively, and corresponding reliability is 0.9780 and 0.9882. When the crank angle is 198°, the velocity reliability index with viscosity of lubricating oil of 400 cp is the lowest, which is 2.539, and corresponding reliability is 0.9945. According to Figs. 34 and 35, when the crank angle is 270°, the acceleration reliability index with viscosity of lubricating oil of 100 cp is the lowest, which is 1.675, and corresponding reliability is 0.9530. When the crank angle is 252°, the acceleration reliability indexes with viscosity of lubricating oil of 200 cp and 400 cp are the lowest, which are 2.051 and 2.389, respectively, and corresponding reliability is 0.9798 and 0.9916. The analysis shows that the higher the viscosity, the higher the reliability index and reliability of mechanism. The increase of viscosity can improve the stability and reliability of mechanism response.
5.3 Impacts of clearance values on dynamic accuracy reliability for mechanism
Clearance value is a significant factor affecting operation of mechanism. This section analyzes the impacts of clearance values of 0.3 mm, 0.5 mm and 0.7 mm on dynamic accuracy reliability for mechanism. Through the output response errors of different clearance values for mechanism and the allowable errors for mechanism, dynamic accuracy reliability is obtained. The lubrication clearance model considers that the mechanism has revolute clearances C1 and C2. Crank driving speeds of mechanism are \(\omega_{1} = - 3\pi \,{\text{rad/s}}\) and \(\omega_{2} = 3\pi \,{\text{rad/s}}\). Viscosity of lubricating oil (40°) is 100 cp. The displacement, velocity, acceleration reliability indexes and their reliability are shown in Figs. 36, 37, 38, 39, 40 and 41.

Displacement reliability index

Displacement reliability

Velocity reliability index

Velocity reliability

Acceleration reliability index

Acceleration reliability
As shown in Figs. 36 and 37, when the crank angle is 180°, the displacement reliability index with clearance value of 0.3 mm is the lowest, which is 2.187, and corresponding reliability is 0.9859. When the crank angle is 162°, the displacement reliability indexes with clearance values of 0.5 mm and 0.7 mm are the lowest, which are 2.014 and 1.832, respectively, and corresponding reliability is 0.9780 and 0.9666. As can be seen from Figs. 38 and 39, when the crank angle is 180°, the velocity reliability indexes with clearance values of 0.3 mm, 0.5 mm and 0.7 mm are the lowest, which are 2.736, 2.013 and 1.304, respectively, and corresponding reliability is 0.9969, 0.9780 and 0.9039. According to Figs. 40 and 41, when the crank angle is 252°, the acceleration reliability index with clearance value of 0.3 mm is the lowest, which is 2.437, and corresponding reliability is 0.9927. When the crank angle is 270°, the acceleration reliability indexes with clearance values of 0.5 mm and 0.7 mm are the lowest, which are 1.675 and 0.5269, respectively, and corresponding reliability is 0.9530 and 0.7009. The analysis shows that the larger clearance value will reduce reliability index and reliability of mechanism, which reduces the kinematic performance of mechanism.
6 Conclusions
This paper presents an analysis method of dynamic response errors and accuracy reliability for mechanism with lubrication clearance joints. The dynamic model and dynamic accuracy reliability model for nine-bar mechanism with multiple lubrication clearance joints are derived. And the major results are as below.
-
1.
Lubrication clearance joint model and dry contact clearance joint model are established. The dynamic model of nine-bar mechanism with multiple lubrication clearance joints is derived according to Lagrangian multiplier method. The dynamic accuracy reliability model is developed by first-order second-moment method.
-
2.
The influences of lubrication clearance and dry contact clearance on dynamic response errors and accuracy reliability for mechanism are compared and analyzed at different driving speeds. Dynamic accuracy reliability of slider with change of crank angle in a cycle is analyzed. Results show that lubrication can effectively reduce dynamic response errors and improve dynamic accuracy reliability for mechanism. In addition, the increase of driving speed will increase the dynamic response errors and reduce the reliability of mechanism.
-
3.
The influences of dynamic viscosity and clearance values on dynamic response errors and accuracy reliability for mechanism with lubrication clearance joints are researched. Results show that the increase of dynamic viscosity and the decrease of clearance value can reduce the dynamic response errors and improve the dynamic accuracy reliability of mechanism.
Data availability
The data used to support the findings of this study are included within the article.
References
Huang, P., Huang, H.Z., Li, Y.F., et al.: Positioning accuracy reliability analysis of industrial robots based on differential kinematics and saddlepoint approximation. Mech. Mach. Theory 162(4), 104367 (2021)
Pei, J.X., Han, X., Tao, Y.R., et al.: Lubrication reliability analysis of spur gear systems based on random dynamics. Tribol. Int. 153, 106606 (2020)
Wang, Z.H., Wang, Z.L., Yu, S., et al.: Time-dependent mechanism reliability analysis based on envelope function and vine-copula function. Mech. Mach. Theory 134, 667–684 (2019)
Xiang, W.W.K., Yan, S.Z., Wu, J.N., et al.: Dynamic response and sensitivity analysis for mechanical systems with clearance joints and parameter uncertainties using Chebyshev polynomials method. Mech. Syst. Signal Process. 138, 106596 (2020)
Fang, C.C., Meng, X.H., Lu, Z.J., et al.: Modeling a lubricated full-floating pin bearing in planar multibody systems. Tribol. Int. 131, 222–237 (2019)
Xie, Z.L., Shen, N.W., Zhu, W.D., et al.: Theoretical and experimental investigation on the influences of misalignment on the lubrication performances and lubrication regimes transition of water lubricated bearing. Mech. Syst. Signal Process. 149, 107211 (2020)
Zhang, Q., Pan, N., Meloni, M., et al.: Reliability analysis of radially retractable roofs with revolute joint clearances. Reliab. Eng. Syst. Saf. 208, 107401 (2020)
Geng, X.Y., Li, M., Liu, Y.F., et al.: Non-probabilistic kinematic reliability analysis of planar mechanisms with non-uniform revolute clearance joints. Mech. Mach. Theory 140, 413–433 (2019)
Xiao, M.H., Geng, G.S., Li, G.H., et al.: Analysis on dynamic precision reliability of high-speed precision press based on Monte Carlo method. Nonlinear Dyn. 90(4), 2979–2988 (2017)
Zhang, F., Xu, X.Y., Cheng, L., et al.: Mechanism reliability and sensitivity analysis method using truncated and correlated normal variables. Saf. Sci. 125, 104615 (2020)
Zhang, D.Q., Han, X.: Kinematic reliability analysis of robotic manipulator. J. Mech. Des. 142(4), 044502 (2019)
Wang, L., Zhang, X.F., Zhou, Y.J.J.: An effective approach for kinematic reliability analysis of steering mechanisms. Reliab. Eng. Syst. Saf. 180, 62–76 (2018)
Wu, J.N., Yan, S.Z., Li, J.L., et al.: Mechanism reliability of bistable compliant mechanisms considering degradation and uncertainties: modeling and evaluation method. Appl. Math. Model. 40(23–24), 10377–10388 (2016)
Qui, J.W., Zhang, J.G., Ma, Y.P., et al.: Reliability-based robust design for kinematic accuracy of a mechanism with axiomatic theory. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 232(13), 2412–2423 (2017)
Zhan, Z.H., Zhang, X.M., Zhang, H.D., et al.: Unified motion reliability analysis and comparison study of planar parallel manipulators with interval joint clearance variables. Mech. Mach. Theory 138, 58–75 (2019)
Xu, D.T.: Kinematic reliability and sensitivity analysis of the modified Delta parallel mechanism. Int. J. Adv. Rob. Syst. 15(1), 1729881418759106 (2018)
Zhang, J.F., Du, X.P.: Time-dependent reliability analysis for function generation mechanisms with random joint clearances. Mech. Mach. Theory 92, 184–199 (2015)
Wang, W.X., Gao, H.S., Wei, P.F., et al.: Extending first-passage method to reliability sensitivity analysis of motion mechanisms. Proc. Inst. Mech. Eng. O J. Risk Reliab. 231(5), 573–586 (2017)
Gao, Y., Zhang, F., Li, Y.Y.: Reliability optimization design of a planar multi-body system with two clearance joints based on reliability sensitivity analysis. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 233(4), 1369–1382 (2018)
Wu, J.N., Yan, S.Z., Zuo, M.J.: Evaluating the reliability of multi-body mechanisms: a method considering the uncertainties of dynamic performance. Reliab. Eng. Syst. Saf. 149, 96–106 (2016)
Zhuang, X.C., Yu, T.X., Shen, L.J., et al.: Time-varying dependence research on wear of revolute joints and reliability evaluation of a lock mechanism. Eng. Fail. Anal. 96, 543–561 (2019)
Li, J.L., Huang, H.Z., Yan, S.Z., et al.: Kinematic accuracy and dynamic performance of a simple planar space deployable mechanism with joint clearance considering parameter uncertainty. Acta Astronaut. 136, 34–45 (2017)
Pandey, M.D., Zhang, X.F.: System reliability analysis of the robotic manipulator with random joint clearances. Mech. Mach. Theory 58, 137–152 (2012)
Lai, X., Duan, J.: Probabilistic approach to mechanism reliability with multi-influencing factors. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 225(12), 2991–2996 (2011)
Lara-Molina, F.A., Dumur, D.: Global performance criterion of robotic manipulator with clearances based on reliability. J. Braz. Soc. Mech. Sci. Eng. 42(12), 624 (2020)
Chen, Y., Wu, K., Wu, X.Z., et al.: Kinematic accuracy and nonlinear dynamics of a flexible slider-crank mechanism with multiple clearance joints. Eur. J. Mech. A Solids 88, 104277 (2021)
Li, Y., Shang, D.Y., Fan, X., et al.: Motion reliability analysis of the delta parallel robot considering mechanism errors. Math. Probl. Eng. 2019, 3501921 (2019)
Sun, D.Y., Chen, G.P.: Kinematic accuracy analysis of planar mechanisms with clearance involving random and epistemic uncertainty. Eur. J. Mech. A Solids 58, 256–261 (2016)
Zhang, X.F., Pandey, M.D.: An efficient method for system reliability analysis of planar mechanisms. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 227(2), 373–386 (2013)
Chen, X.L., Wang, T., Jiang, S.: Study on dynamic behavior of planar multibody system with multiple lubrication clearance joints. Eur. J. Mech. A Solids 91, 104404 (2021)
Zheng, X.D., Zhang, R.S., Wang, Q.: Comparison and analysis of two Coulomb friction models on the dynamic behavior of slider-crank mechanism with a revolute clearance joint. Appl. Math. Mech. 39(9), 1239–1258 (2018)
Pinkus, O., Sternlicht, B.: Theory of Hydrodynamic Lubrication. McGra-Hill, New York (1961)
Flores, P., Ambrósio, J., Claro, J.C.P., et al.: Lubricated revolute joints in rigid multibody systems. Nonlinear Dyn. 56(3), 277–295 (2009)
Acknowledgements
This research is supported by Shandong Key Research and Development Public Welfare Program (2019GGX104011) and Natural Science Foundation of Shandong Province (Grant No. ZR2017MEE066).
Author information
Authors and Affiliations
Contributions
This manuscript has not been published, simultaneously submitted or already accepted for publication elsewhere. All authors have read and approved the manuscript. There is no conflict of interest related to individual authors’ commitments and any project support. All acknowledged persons have read and given permission to be named. XC has nothing to disclose.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chen, X., Wang, T. & Gao, S. Dynamic response errors and accuracy reliability for mechanism with multiple lubrication clearance joints. Arch Appl Mech 93, 525–550 (2023). https://doi.org/10.1007/s00419-022-02283-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-022-02283-2