
Abstract
The water content in the oil recovery fluid is elevated by water injection mining, and the exploration of the microscopic adhesion behavior of oil droplets has become a hot research topic for multiphase flow systems in the petrochemical field. By revealing the oil droplet–wall interaction mechanism, the purpose of enhancing the oil droplet coalescence efficiency and regulating the direction of oil droplet movement is realized. In this paper, the evolution of oil droplet spreading on patterned substrates with different hemispherical structure sizes is investigated through numerical simulations using a volume of the fluid model. The factors that influence the motion behavior of oil droplets, such as initial velocity, structure size, and intrinsic contact angle, are analyzed in detail to propose a functional surface that enhances the adhesion and wetting spreading of oil droplets in water. The simulation results demonstrate that appropriately increasing the roughness dimension of the surface can prolong the drainage time, inhibit adhesion, alter the adhesion shape, and facilitate control of the oil droplet direction. It was found that the maximum infiltration depth of oil droplets increased with the increase of the initial velocity and increased with the increase of the spacing factor, and the wetting angle exhibited the opposite trend and decreased with the increase of the microstructure diameter. The spreading degree of oil droplets under different intrinsic contact angles in the studied surface roughness range is investigated and demonstrates that the apparent contact angle decreases at higher roughness scales on lipophilic surfaces and increases slowly with increasing structure size when the wall surface is more oleophobic. The results of this study provide a basis for further research on droplet infiltration spread and the improvement of oil–water separation efficiency.
Graphical Abstract

Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Oil–water two-phase flow is prevalent in the oil industry. Currently, many onshore oil fields are in the late stages of water injection and extraction, resulting in increased water content in the extracted fluid and small particle size of oil droplets. Therefore, improving the effectiveness of oil–water separation is essential [1,2,3]. Surface modification and structure optimization can regulate the wetting characteristics of the corrugated plate, thereby changing the spreading and wetting behavior of oil droplets on the plate surface and effectively improving the oil–water separation efficiency of the corrugated plate [4, 5]. Corrugated plate packages for oil–water separation are derived from API separation tanks developed by the American Petroleum Institute. Made of polypropylene (PP), the corrugated plates in the Natco were arranged in a crisscross pattern, which improved the effect of coalescence and simplified the installation. The Wemco plate coalesce [6] was composed of a rectangular PP corrugated plate with an inclination angle of 60° to the horizontal, which improved the efficiency of the oil–water separation. Therefore, optimizing the corrugated plate is the key technology to achieve efficient oil–water separation.
The key to corrugated plate technology is to analyze the kinetic characteristics and spreading mechanisms of oil droplets on rough structures. The spreading behavior of liquid droplets on solid surfaces is investigated, and its wetting state is explained, focusing on static wetting state and spreading state to dynamic wetting state. A series of new concepts, such as contact angle hysteresis, are proposed [7,8,9,10,11,12,13,14,15,16]. The development of high-speed photography technology has supported the experimental study of the dynamic characteristics of droplet spreading. Some researchers have observed and analyzed the morphological change rule of droplet impact on the solid surface through high-speed microphotography experiments and obtained the effects of parameters such as surface wetting characteristics, surface tension, Weber number (We), and surface array structure on the evolution of droplet deformation, and the kinetic mechanism of droplet spreading was analyzed. After observing the process of microdrops hitting the solid surface at different velocities, it was found that the inertial force plays a decisive role in the initial stage of the impact [17]. Zhang and Basaran [18] observed the dynamic process of droplet impact and found that Marangoni stress at the phase interface will prevent the droplet from spreading when the surfactant is unevenly distributed.
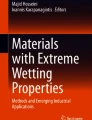
Most materials used in practical applications are not absolutely smooth; manufacturing process-generated pores, grooves, or uneven bumps provide their surfaces with unpredictable roughness, which affects how liquid droplets diffuse. The “non-wet contact” wetting mode of the Cassie state [19] causes the droplets to move quickly in rolling form, whereas when the “wet contact” wetting mode represented by the Wenzel state [20] is diffused, the contact line produces a strong “pinning effect” during spreading, which lowers the droplets’ mobility. The corresponding patterns are shown in Fig. 1b, c. Droplets in the Cassie state can be transformed into Wenzel droplets by external perturbations.

a The model of Young’s equation. b The Cassie state’ model. c The Wenzel state model. d Aqueous droplets on a glass substrate. e Aqueous droplets on a PTFE substrate
For example, the same aqueous droplets can be partially diffused on the glass substrate (Fig. 1d) but hardly diffused on the PTFE substrate, as shown in Fig. 1e, which shows that the state of wetting or non-wetting is not only dependent on the liquid but also related to the whole liquid–solid property [21]. Research on droplets on rough substrates with different configurations has been gradually developing, and changing the surface pattern creates a lot of interesting impact phenomena [22,23,24,25,26]. In addition, parameters such as droplet diameter, impact velocity, surface tension, and dynamic viscosity, as well as solid–liquid contact angle, were used to study the morphological changes of droplet spreading on the drying surface [27]. The increase in impact velocity and We led to a subsequent increase in the maximum spreading factor, while the increase in surface roughness decreases the maximum spreading factor \(\beta_{\max } = D_{\max } /D_{0}\), i.e., the ratio of the maximum spreading diameter to initial diameter [28].
Among the microstructures that exhibit superhydrophobic properties, the honeycomb hollow structure has higher drainage and greater heat resistance [29]. Droplet impingement occurs in a wide variety of ways on surfaces that are porous, patterned with rough elements, penetrating holes, closed pits, and where wettability varies with space [30]. On textured surfaces, droplet rebound is influenced by the uniformity of surface roughness, and changing the surface roughness could manipulate the axial and lateral rebound of droplet impact [31]. The maximum spreading diameter of droplets decreases as the fraction of texture area on the surface decreases [32]. Lou et al. [33] observed the formation of water and liquid metal polygonal droplets on non-wetting pillar-patterned surfaces. The surface of the cross pillar can provide better rebound ability, the surface with greater contact, and the angle can increase the droplet impact velocity range, decrease the contact time, and lessen the liquid’s penetration depth [34]. On patterned substrates, Fan and Bandaru noticed a variation in the wetting angles of water and oil. This difference was accounted for by the differing levels of liquid penetration, which caused a shift in surface energy at the liquid-interstitial interface [35].
The basic issue with precisely defining the droplet shape and its energy state is whether the essential geometrical characteristics of the droplet can be captured. However, accurately quantifying the impact of mechanical heterogeneity on droplet behavior remains a significant challenge. The continuous-phase medium under study is air in the current related research, which mainly focuses on droplets impacting hydrophobic and superhydrophobic surfaces. However, because oleophilic substrates have better-gathering effects than hydrophilic substrates, oil-wetting coalescence behavior frequently occurs on oleophilic surfaces, making the force of the oil droplets and their motion characteristics more complicated. In addition, due to the limits of the experimental equipment, micron-sized oil droplets are less frequently researched and are more millimeter-sized employed. On the other hand, the microscopic experiment and mechanism research relating to corrugated plate packs applied for oil–water separation is insufficient.
This paper intends to use a numerical simulation method, set up different array structures to change the surface roughness, modify its initial velocity and intrinsic contact angle, and investigate the motion process and kinetic mechanism of individual oil droplets floating in the water and spreading on different wettability surfaces so as to promote oil droplet agglomeration and desorption. This will have important implications for the design of materials and surfaces that can promote efficient oil droplet agglomeration and separation, with potential applications in a range of fields such as environmental engineering and materials science.
Models and methods
Physical model
Numerical simulation is mainly used to study microscopic features that cannot be observed by experimental means, and its accuracy is related to the selected model. Before the numerical calculation of the droplet spreading process, a reasonable physical model must be established to ensure that the observed results are within the practical range.
To simulate the wetting and spreading of oil droplets in static water on a rough, solid surface, a three-dimensional model was constructed. The size of the simulation domain is given by 100 μm × 200 μm × 200 μm; the initial position of oil droplets was at the contact point between the upper surface and the rough wall; and the equivalent diameter D0 = 50 μm. The rough wall array structure was drawn by Solidworks, and the geometric model is shown in Fig. 2. h is the distance from the bottom of the oil droplet to the hemispherical structure. With the advance of time, the oil droplet will gradually spread, and h will change accordingly. v0 refers to the initial velocity of the oil droplet moving upward along the y-axis direction.

Physical model
The fluid is regarded as an incompressible Newtonian fluid and as flowing in line with the laminar flow law based on the numerical simulation platform. In this study, which is a finite volume method, the volume of fluid (VOF) method was used. Compared with other multi-phase models (such as the phase-field model and LBM model, which generate a spreading interface), the VOF model proposed by Hirt and Nichols [36] can provide a sharp and clear interface. The basic idea is to simulate multiphase flow by solving the same set of momentum equations for immiscible fluids over the entire computational domain and tracking the volume fraction of each fluid. The oil droplet region is specified and set as a quarter of the simulation domain, as shown in Fig. 3 to limit the number of meshes and simplify the calculation. The top is the solid wall surface, the bottom is the pressure-outlet boundary, and symmetric boundary conditions are applied to the x-o-y and y–o-z planes. The pressure and velocity coupling is in PISO format, and the pressure is solved by body force weighting since the volume fraction equation and momentum equation are solved using Geo-Reconstruct and Second-Order Upwind, respectively.

Computation domain and boundary condition
Theoretical model of droplet spreading
Based on the Young’s equation, the classical immersion model in air is,
where \(\gamma_{{{\text{SG}}}}\) is the solid–gas surface tension, \(\gamma_{{{\text{SL}}}}\) is the solid–liquid surface tension, \(\gamma_{{{\text{LG}}}}\) is the liquid–solid surface tension, and \(\theta\) is the contact angle, as shown in Fig. 1a.
The model is also applicable to water, i.e., the Young state in water. Oil droplets in water in contact with water and solid surfaces form a solid–water–oil three-phase interface, and the contact angle of oil droplets in water can be expressed by Young’s equation for underwater,
where \(\gamma_{{{\text{SW}}}}\) is the solid–water surface tension, \(\gamma_{{{\text{SO}}}}\) is the solid–oil surface tension, and \(\gamma_{{{\text{WO}}}}\) and is the water–oil surface tension.
There are two main cases of oil droplet wetting on rough surfaces, in order to fit the wetting state of the surface, the Wenzel theory model is introduced:
where r is the roughness factor, which is the ratio of actual area to projected area as viewed from above (plan view) \(\left( {r \ge 1} \right)\). When the surface roughness of hydrophilic surfaces is increased, the overall hydrophilicity rises and the apparent contact angle decreases, whereas when the roughness of hydrophobic surfaces is raised, the apparent contact angle also rises. However, the Wenzel model did not take into account non-wetting processes, and subsequently, Cassie and Baxter extended the study of Wenzel’s equation by proposing a theoretical model for the non-wetting method,
where \(f_{1}\) and \(f_{2}\) are the fractions of the interface area occupied by the solid–oil and oil–water phases, respectively \(\left( {f < 1} \right)\), the smaller the area fraction, the larger the apparent contact angle, and \(f_{1} + f_{2} = 1\). In the underwater Cassie state, the voids in the microstructure of the solid surface are completely infiltrated by water, forming a water film, at this point, the oil droplet is on a composite matrix of solid and water film and is in contact only with the top of the rough microstructure, so the equation is obtained,
The wettability of a solid surface can be characterized by the following equation in the case of a rough solid surface with a graded structure,
VOF method
The spreading and deformation of droplets on the solid wall are treated as an incompressible, isothermal, and immiscible two-phase flow with no mass transfer. In this calculation, the VOF method is used to track the oil–water two-phase interface. As a type of the Euler–Euler multiphase flow model, the VOF model focuses on the flow of two or more unmixed fluids, and the resulting velocity field is common to each phase. The resulting model can provide a clear interface for simulation by solving the individual momentum equations and dealing with the volume fraction of each fluid through the region. The volume fraction of phases is introduced in the model, and the volume fraction of the \(i\) th phase in each mesh is defined as
denotes the ratio of the fluid volume \(V_{i}\) of the ith phase to the total volume \(V_{q}\) in the calculation unit \(q\).
In the present work, there are two phases in each mesh; the volume fraction of the main water phase is given by
For fluids with constant density, the equation of continuity for incompressible fluids is used,
The flow field is obtained by solving the Navier–Stokes equation, i.e., the momentum equation as
where \(\rho\) is the density of fluids, \(t\) is time, \(v\) is the fluid velocity, and \(F\) is the dynamic viscosity of fluids and surface tension source term.
Surface wettability is a major factor influencing the flow behavior of droplets impacting the wall, and the surface tension model incorporates the effect of surface tension in the form of volumetric forces into the momentum equation’s source term. In the VOF model, for free surface flow, a wall adhesion model is used in conjunction with a surface tension model by specifying the wall contact angle to adjust the interfacial curvature of the calculation cell near the wall. The continuum surface force (CSF) model is used to calculate surface tension.
The wall adhesion model is used in conjunction with the surface tension model in the VOF model for free surface flow by specifying the contact angle in order to adjust the interfacial curvature of the computational unit near the surface. The CSF model proposed by Brackbill et al. [37] is adopted to calculate the surface tension force:
where \(\sigma\) is the surface tension coefficient, \(\alpha\) is the volume fraction, and \(\kappa\) is the curvature of the interface, which can be used to adjust the body force term in the surface tension calculation, given by the scatter of the unit normal vector.
\(\overrightarrow {n}\) is the unit vector normal at the phase interface, which can be found from the gradient of the volume fraction perpendicular to the direction of the interface, where \(\overrightarrow {{n_{w} }}\) and \(\overrightarrow {{t_{w} }}\) are the unit vectors normal and tangential to the wall, respectively, and \(\theta_{0}\) is the actual contact angle between the droplet and the wall, i.e., the intrinsic contact angle.
Mesh independence
To ensure the stability of the model, the global Courant number is restricted to 0.2. To verify the effectiveness of the mesh sizes, meshes with dimensions of 1.6 μm, 1.2 μm, 0.8 μm, and 0.4 μm, respectively, were employed in the aforementioned model for simulating the behavior of liquid water as the continuous phase at an ambient temperature of 298 K and a pressure of 101 kPa, along with dimethyl silicone oil as the dispersed phase, as specified in Table 1, in comparison with experiments [38].
The evolution of the vertical distance of the bottom of the oil droplet from the wall is presented in Fig. 4, and Fig. 5 shows the sharpness of the edges of the oil drops after spreading at different grid sizes. It is evident that the simulation results using a mesh size of 0.8 μm already provide an accurate representation of the droplet morphology, which is similar to that obtained using the 0.4-μm mesh size but with reduced computational requirements. Therefore, a mesh size of 0.8 μm is utilized in all subsequent simulations to achieve computational efficiency without compromising accuracy.

Simulation of the position evolution of the droplet bottom surface during impact with different meshes

Grid-independent verification: a–d the calculated results of 1.6 μm, 1.4 μm, 0.8 μm, and 0.4 μm meshes
Simulation results and discussion
Behavior of oil droplets on surfaces with different roughness
Surface roughness is one of the factors affecting the wettability of solid surfaces, and its size can be adjusted and controlled by building rough structures. To study the influence of microstructure changes on the wetting state of oil droplets evolving on the surface, different microstructure surfaces are established. The dimensionless parameter spacing factor S is introduced, that is, the ratio of hemispheric structure diameter di to spacing P, as shown in Fig. 6

Schematic diagram of the hemisphere structure array
The spreading process of oil droplets with an intrinsic contact angle of \(\theta_{{0}}\) = 74.2° at a speed of 0.00001 m s−1 on each wettability wall is simulated using the corresponding spacing factor. The diameter of the hemispherical structure and its related data are given in Table 2.
It was found that the spreading state of oil droplets in water is not completely linear with the spacing factor. Figure 7 shows the process of oil droplets diffusing over time on several microstructure rough surfaces of different sizes. It is observed that the spreading process of oil droplets can be divided into three stages: rapid spreading, oscillation, and stable spreading. During the spreading process, the oil droplets first go through the drainage period. In the initial stage, use the capillary length κ−1 as the characteristic length of a droplet to characterize the dominant force acting on the droplet. When the droplet radius is lower than its capillary length, the effect of gravity on the spreading of the droplet motion can be neglected. The capillary length can be defined as the characteristic length at the equilibrium of the Laplace pressure γ/κ−1 and the hydrostatic pressure ρgκ−1,
where ρd denotes the density of the droplet and g is the acceleration of gravity, \(g = 9.8{\text{ m s}}^{{ - {2}}}\).

Spreading of oil droplets on different-sized hemispherical wall surfaces, from top to bottom, is: a Smooth. b S = 1/3. c S = 1/2. d S = 2/3. e S = 3/4. f S = 4/5
When the droplet radius \(R < \kappa^{ - 1}\), the effect of gravity is negligible, and then capillary force plays a dominant role; when the droplet radius \(R > \kappa^{ - 1}\), gravity plays a dominant role. The oil–water interfacial tension of silicone oil in the text is \(\gamma_{wo} = 0.032{\text{ N m}}^{ - 1}\), and the density is \(\rho_{0} = 960{\text{ kg m}}^{{ - {3}}}\), from which the capillary length of silicone oil can be calculated as
The droplet radius in this study is 25 μm, which is much smaller than the capillary length, and thus surface tension plays a dominant role in the theoretical analysis. As the oil droplets interact with the solid surface, the top is first squeezed and rapidly deformed. With time, the oil droplets need to overcome the adhesion force between the liquid water and the wall surface, transforming into a motion phase dominated by the viscous force and entering the oscillation phase with a smaller amplitude. Influenced by the size of the wall structure, the distance between the bottom of the oil drop and the apex of the wall hemisphere structure gradually decreases, then the force at each point gradually stabilizes, the oil droplets no longer spread, and the three-phase contact line on the surface is pinned in place to reach a stable state.
Figure 8 depicts the time-dependent variation of the distance h between the bottom of the oil drop and the center of the surface as it spreads in water. The spreading speed of oil droplets on a smooth surface is much faster than on other rough surfaces, and the spreading is completed in less than 360 μs.

a–e Distance from the bottom of the droplet to the center of the hemispherical structure as the oil droplet spreads over the different walls. a Variation in oil droplet spread distance over time on smooth walls. b–f Variation of the spreading distance of oil droplets on the walls of a structure at 2.5–20 μm with time
On the microstructured surface, the strength of the shear action and frictional resistance to the flow of oil droplets increases, and the resulting viscous dissipative effect is enhanced, affecting the droplet repulsion of the water phase contact surface velocity. The time required is much longer than that of the smooth surface. Meanwhile, with the increase of the spacing factor, the distance from the bottom to the center of the surface decreases after the oil droplet spreads completely, which indicates that the convex hemisphere structure can promote the spread of the oil droplet on the wall within a certain range.
The final spreading modes of oil droplets on different structural surfaces are shown in Fig. 9. In the hemisphere structure, the size is much smaller than the oil droplet diameter of the surface, such as d = 2.5 μm and d = 5 μm. The oil droplet bottom distance h from the surface is similar, about 26 μm, and the final oil droplet morphology presented closer to the smooth plane of the circular. With the increase of spacing factor S, h decreases rapidly, and from d = 10 μm, the liquid–liquid interface scale is comparable to the solid wall structure scale, and the local wetting state of droplets is obviously influenced by the microstructure, showing various shapes. The oil droplets took the longest time to spread on the microstructure wall surface of d = 15 μm, and it took 962 μs to reach the stable spreading state, which inhibited the oil droplet adhesion, but when the h decreased to 18.43 μm, it increased the difficulty of desorption. After the oil droplets were spread completely, the final morphology of the oil droplets showed an obvious cross shape. On surfaces larger than 15 μm, as the oil droplets spread along the solid surface, the liquid molecules at both ends of the convex hemisphere walls are accelerated into the interior of the structure by capillary forces. Over time, the liquid molecules located at the spreading front partially infiltrate the interior of the hemispherical structure, increasing the curvature of the liquid level. The Laplace pressure inside the oil droplet rises, providing additional driving force and energy for the adjacent liquid. The spreading speed of the oil droplet in each direction close to the hemisphere structure is slower, while the spreading speed of the oil droplet farther away from the hemisphere structure is accelerated, showing a quadrilateral state with the side lines collapsing inward along the hemispherical structure.

Final shape of oil droplets on the surface of different structures
Behavior of oil droplet with different initial velocities
Oil droplets penetrate the grooves and infiltrate gradually when roughness is prevalent and the spacing factor is lower. The oil droplets behave significantly differently in the two spreading systems. As the spacing factor increased, the oil droplets penetrated into the hemispherical structure more quickly and transitioned from the non-infiltrated to the infiltrated state.
As the structure diameter converged toward the oil droplet scale, the influence of the surface curvature size accelerated, and it was discovered that some oil phase remained in the grooves, and the maximum infiltration depth presented by the oil droplets in the Cassie state with the variation of the hemispherical structure diameter was expressed by \(H_{\max }\), and the infiltration angle \(\theta_{a}\) was the angle corresponding to the infiltration arc length of a single structure, as in Fig. 10. One of the parameters used to determine the wetting state is the magnitude \(H_{\max }\). When it is equivalent to the equivalent diameter d, the wetting of oil droplets transforms into the Wenzel model. From Fig. 11, it can be found that as the initial velocity of oil droplet spreading was increased, its maximum infiltration depth deepened slowly and increased with the increase of the spacing factor; correspondingly, the infiltration angle increased along with the rise in initial velocity, but the larger the diameter of the microstructure, the smaller the infiltration angle. Since the gap between the rough structure is occupied by the residual water phase, a composite contact surface is formed between the oil and solid phases when the surface rough structure consistently increases the oleophobicity of the solid surface, and the oleophobicity on the inherent lipophilic surface is still strengthened with the reduction of the oil–solid contact surface.

Diagram of oil droplet infiltration degree parameters

Simulation results of maximum oil droplet infiltration depth and infiltration angle at different impact velocities
Behavior of oil droplets with different intrinsic contact angles
In the actual process of oil–water separation, different plates have different wettability and different intrinsic contact angles, and the final spreading state shows various effects. The simulation result of four intrinsic contact angles from lipophilic to oleophobic (\(\theta_{{0}}\) = 29°, 43.9°, 74.2°, and 130.7°) and the measured values of the ultimate apparent contact angle magnitude are illustrated in Fig. 12. The oil droplet contact area fraction on the top surface drops as the intrinsic contact angle \(\theta_{{0}}\) increases, and in contrast, the contact area fraction on the symmetry surface increases gradually. For hydrophilic surfaces with intrinsic contact angles other than 0°, droplet immersion into the microstructure can appear in two forms: one is complete immersion, where the three-phase line acts continuously on the solid substrate and the droplet has a spherical crown on longitudinal cross-section, that is, the droplet exhibits a Wenzel state. Second, as \(\theta_{{0}}\) = 29° and 43.9°, the three-phase line continues to spread outward, the oil droplets partially infiltrate the surface, but a portion of the water phase still exists within the surface microstructure that is not covered by oil droplets, and the edge presents a critical state bounded between the Wenzel state and the Cassie state.

Contact area fraction of oil droplets on the top and symmetry surfaces for different intrinsic contact angles
Extending the simulation to other plate surfaces, as in Fig. 13. When the surface is more oleophobic, that is, when \(\theta_{{0}}\) = 130.7°, \(\theta_{{{\text{AP}}}}\) is bigger than the initial intrinsic contact angle \(\theta_{{0}}\), which slowly increases as the spacing factor S grows. Oil droplet coalescence normally occurs on lipophilic surfaces, and \(\theta_{{{\text{AP}}}}\) is typically smaller than its intrinsic contact angle on surfaces with reduced hydrophobicity, reaching the lipophilic degree of surfaces. The greater the roughness, the greater the \(\theta_{{{\text{AP}}}}\) decreases, meaning that the surface roughness makes the inherently hydrophilic solid surface more hydrophilic and the inherently hydrophobic solid surface more hydrophobic. It is noteworthy that oil droplets on the lipophilic surface of the plate with d = 15 μm have an increased final apparent contact angle relative to the nearby structures.

Apparent contact angle measurements at different θ0
In summary, a numerical model has been developed to study the spreading behavior of oil droplets on a rough wall surface in water. The adsorption and spreading of microscale oil droplets on the solid surface in water are simulated, and the dynamic characteristics of oil droplet spreading with the change of roughness are obtained. The kinetic mechanism of droplet infiltration on curved walls has been elucidated. The spreading process of oil droplets was observed to undergo two distinct stages. The first stage was characterized by rapid spreading, jointly driven by inertial forces and surface tension, while the other stage involved oscillation and stabilization dominated by viscous and capillary forces, among others. The present study investigated the effects of wall spacing factor and intrinsic contact angle on droplet spreading morphology, distance from the bottom, and apparent contact angle. Increasing the roughness of the wall structure resulted in an extended spreading time, with oil droplets reaching maximum spreading on the hemispherical structure plate surface with d = 15 μm. Spreading on the rough wall surface exhibited anisotropic behavior, with the hemispherical structure showing superior spreading characteristics. Specifically, the droplets displayed a continuous, accelerated approach to the protruding structure, leading to more controllable agglomeration and desorption behavior and direction.
Engineering significance of the research content: the study of the kinetic mechanism of infiltration and agglomeration of micro-oil droplets in water on a bionic gradient wetted surface can improve the droplet spreading dynamics, provide a basis for the study and regulation of microscale droplet motion laws, provide an in-depth understanding of the nature of oil–water separation, and have important scientific significance and engineering value for improving the efficiency of oil–water separation engineering.
Availability of data and materials
The data that support the findings of this study are available within the article.
References
Chen ASC, Flynn JT, Cook RG, Casaday AL (1991) Removal of oil, grease, and suspended solids from produced water with ceramic crossflow microfiltration. SPE Prod Eng 6:131–136. https://doi.org/10.2118/20291-PA
Li J, Gu Y (2005) Coalescence of oil-in-water emulsions in fibrous and granular beds. Sep Purif Technol 42:1–13. https://doi.org/10.1016/j.seppur.2004.05.006
Han Y, He L, Luo X et al (2017) A review of the recent advances in design of corrugated plate packs applied for oil–water separation. J Ind Eng Chem 53:37–50. https://doi.org/10.1016/j.jiec.2017.04.029
Sharifi H, Shaw JM (1996) Secondary drop production in packed-bed coalescers. Chem Eng Sci 51:4817–4826. https://doi.org/10.1016/0009-2509(96)00321-1
Kenawy FA, Kandil M, Fouad A-A (1997) Produced water treatment technology, a study of oil/water separation in gravity type cross flow pack separators for qualitative separation. SPE Prod Facil 12:112–115
Wemco, Pacesetter separators (1986) P.O. Box 15619, Sacramento, CA 95852 USA
Li R, Ninokata H, Mori M (2011) A numerical study of impact force caused by liquid droplet impingement onto a rigid wall. Prog Nucl Energy 53:881–885. https://doi.org/10.1016/j.pnucene.2011.03.002
Adamson AW, Gast AP (1997) Physical chemistry of surfaces, 6th edition
Bird JC, Dhiman R, Kwon H-M, Varanasi KK (2013) Reducing the contact time of a bouncing drop. Nature 503:385–388. https://doi.org/10.1038/nature12740
Cox RG (1986) The dynamics of the spreading of liquids on a solid surface. Part 2. Surfactants J Fluid Mech 168:195–220
Gong W, Yan Y, Chen S, Giddings D (2017) Numerical study of wetting transitions on biomimetic surfaces using a lattice Boltzmann approach with large density ratio. J Bionic Eng 14:486–496. https://doi.org/10.1016/S1672-6529(16)60414-6
Gunjal PR, Ranade VV, Chaudhari RV (2005) Dynamics of drop impact on solid surface: experiments and VOF simulations. AIChE J 51:59–78. https://doi.org/10.1002/aic.10300
Kim H, Lee C, Kim MH, Kim J (2012) Drop impact characteristics and structure effects of hydrophobic surfaces with micro- and/or nanoscaled structures. Langmuir 28:11250–11257. https://doi.org/10.1021/la302215n
Lopez J, Miller CA, Ruckenstein E (1976) Spreading kinetics of liquid drops on solids. J Colloid Interface Sci 56:460–468. https://doi.org/10.1016/0021-9797(76)90111-9
Pasaogullari U, Wang C (2004) Liquid water transport in gas diffusion layer of polymer electrolyte fuel cells. J Electrochem Soc 151
Rioboo R, Bauthier C, Conti J et al (2003) Experimental investigation of splash and crown formation during single drop impact on wetted surfaces. Exp Fluids 35:648–652. https://doi.org/10.1007/s00348-003-0719-5
Chaidron G, Soucemarianadin A, Attané P (1999) Study of the impact of drops onto solid surfaces. 1235–1255
Zhang X, Basaran OA (1997) Dynamic surface tension effects in impact of a drop with a solid surface. J Colloid Interface Sci 187:166–178. https://doi.org/10.1006/jcis.1996.4668
Cassie ABD, Baxter S (1944) Wettability of porous surfaces. Trans Faraday Soc 40:546–551
Wenzel RN (1936) Resistance of solid surfaces to wetting by water. Ind Eng Chem 28:988–994. https://doi.org/10.1021/ie50320a024
Brutin D, Starov VM (2018) Recent advances in droplet wetting and evaporation. Chem Soc Rev 47(2):558–585
Guo C, Zhao D, Sun Y et al (2018) Droplet impact on anisotropic superhydrophobic surfaces. Langmuir 34:3533–3540. https://doi.org/10.1021/acs.langmuir.7b03752
Kim E, Baek J (2012) Numerical study of the parameters governing the impact dynamics of yield-stress fluid droplets on a solid surface. J Nonnewton Fluid Mech 173–174:62–71. https://doi.org/10.1016/j.jnnfm.2012.02.005
Abolghasemibizaki M, Mohammadi R (2018) Droplet impact on superhydrophobic surfaces fully decorated with cylindrical macrotextures. J Colloid Interface Sci 509:422–431. https://doi.org/10.1016/j.jcis.2017.09.030
Rioboo R, Voué M, Vaillant A, Coninck JD (2008) Drop impact on porous superhydrophobic polymer surfaces. Langmuir : the ACS Journal of Surfaces and Colloids 24(24):14074–14077
Kannan R, Sivakumar D (2008) Drop impact process on a hydrophobic grooved surface. Colloids Surf, A 317:694–704. https://doi.org/10.1016/j.colsurfa.2007.12.005
Yarin AL (2006) Drop impact dynamics: splashing, spreading, receding, bouncing. Annu Rev Fluid Mech 38:159–192. https://doi.org/10.1146/annurev.fluid.38.050304.092144
Tang C, Qin M, Weng X et al (2017) Dynamics of droplet impact on solid surface with different roughness. Int J Multiph Flow 96:56–69. https://doi.org/10.1016/j.ijmultiphaseflow.2017.07.002
Chen K, Sun T (2017) Effects of microstructure design on aluminum surface hydrophobic and ice-retarding properties. Asia-Pac J Chem Eng 12:307–312
Josserand C, Thoroddsen ST (2016) Drop impact on a solid surface. Annu Rev Fluid Mech 48:365–391
Malouin BA, Koratkar NA, Hirsa AH, Wang Z (2010) Directed rebounding of droplets by microscale surface roughness gradients. Appl Phys Lett 96:234103. https://doi.org/10.1063/1.3442500
Kwon DH, Huh HK, Lee SJ (2013) Wetting state and maximum spreading factor of microdroplets impacting on superhydrophobic textured surfaces with anisotropic arrays of pillars. Exp Fluids 54:1576. https://doi.org/10.1007/s00348-013-1576-5
Lou J, Shi S, Ma C et al (2022) Polygonal non-wetting droplets on microtextured surfaces. Nat Commun 13:2685. https://doi.org/10.1038/s41467-022-30399-0
Quan Y, Zhang L-Z (2014) Numerical and analytical study of the impinging and bouncing phenomena of droplets on superhydrophobic surfaces with microtextured structures. Langmuir 30:11640–11649. https://doi.org/10.1021/la502836p
Fan B, Bandaru PR (2017) Anisotropy in the hydrophobic and oleophilic characteristics of patterned surfaces. Appl Phys Lett 111:261603
Hirt CW, Nichols BD (1981) Volume of fluid (VOF) method for the dynamics of free boundaries. J Comput Phys 39:201–225. https://doi.org/10.1016/0021-9991(81)90145-5
Brackbill JU, Kothe DB, Zemach C (1992) A continuum method for modeling surface tension. J Comput Phys 100:335–354. https://doi.org/10.1016/0021-9991(92)90240-Y
Han Y, He L, Zhao Y et al (2018) The influences of special wetting surfaces on the dynamic behaviors of underwater oil droplet. Colloids Surf A 543:15–27. https://doi.org/10.1016/j.colsurfa.2018.01.049
Funding
This work is supported by the National Natural Science Foundation of China (Grant No. 52204074), the Science and Technology Program of Gansu Province of China (Grant No. 21JR7RA221), and the Hongliu Excellent Young Talents Support Program of Lanzhou University of Technology (Grant recipient, Kai Guo).
Author information
Authors and Affiliations
Contributions
Kai Guo: conceptualization and writing—original draft. Xiaoya Liu: formal analysis, investigation, methodology, software, and validation. Yuling Lü: visualization. Limin He: funding acquisition, supervision. Xiaoming Luo: writing—review. Donghai Yang: editing.
Corresponding author
Ethics declarations
Ethical approval
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Guo, K., Liu, X., Lü, Y. et al. A patterned functional substrate for enhancing the wettability of oil droplets. Colloid Polym Sci 302, 151–162 (2024). https://doi.org/10.1007/s00396-023-05185-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00396-023-05185-z