
Abstract
Based upon a combination of a temporally-piecewise adaptive algorithm with an Element-Free Galerkin Scaled Boundary Method (EFG-SBM), a partitioning algorithm is presented for the two-dimensional viscoelastic analysis of cyclically symmetric structures. By expanding variables at a discretized time interval, the variations of variables can be described more precisely, and a space–time domain-coupled problem can be converted into a series of recurrent boundary value problems which are solved by an EFG-SBM-based partitioning algorithm via an adaptive computing process. Numerical examples are given to verify the proposed algorithm in terms of computing accuracy and efficiency.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 1. Introduction
Efficient numerical algorithms are increasingly demanding to solve viscoelastic problems because analytical solutions are very limited, regarding the time-dependent constitutive relationship, complex geometry and boundary conditions [1,2,3,4,5,6,7].
The scaled boundary method (SBM) [8,9,10,11] is a spatial discretized algorithm that is semi-analytical, and takes advantages in dealing with problems of stress singularities and unbounded domains [12,13,14,15,16,17,18,19,20]. SBM has been employed in the viscoelastic analysis as a spacial solver at each of time intervals [5].
SBM is more computationally expensive than FEM mainly because an eigenvalue problem needs to be solved in generating system equations, thus as a spatial solver used for every recursive euqation, frequently, it is definitely more necessary and significant for SBM to reduce its computational cost.
In this paper, using an expansion technique in the time domain, an initial boundary value problem of viscoelasticity is decoupled into a series of recurrent boundary value problems which are solved by an EFG-SBM. If the structure of interest is cyclically symmetric [24,22,23,24], both the eigenvalue and system equations of EFG-SBM can be solved utilizing a partitioning algorithm, and the computational cost will be reduced by solving a series of independent subproblems instead of the whole EFG-SB equations at each of time intervals. On the other hand, at a discretized time interval, the variations of variables can be described more precisely, computing accuracy can be controlled via an adaptive process. Although there was a previous work concerned with exploitation of the cyclic symmetry in viscoelastic analysis by scaled boundary finite element method (SBFEM) [25], but it seems no report relevant to EFG-SBM.
This paper is organized as follows. Recursive viscoelastic governing equations and EFG-SBM equations are given in Sects. 2 and 3, respectively. Rotationally periodic symmetrical structures are briefly described in Sect. 4, and a piecewise partitioning algorithm is presented in the Sect. 5. Section 6 provides numerical verification via two examples and Sect. 7 summarizes conclusions.
2 2. Recurrent governing equations
The governing equations of 2-D viscoelastic problems are described by [26].
Equilibrium equation
Relationship of strain and displacement
where σ and ε denote the vectors of stress and strain, respectively, b is the vector of body force, u is the vector of displacement,
The viscoelastic constitutive relationships are specified by a three-parameter solid model (see Fig. 1) in a differential form [1, 27, 28].

Three-parameter solid
where
where \(v\), \({E_1}\), \({E_2}\), and \({\eta _1}\) are constitutive parameters.
For the plane strain problems, \({E_1}\), \({E_2}\), \({\eta _1}\) and \(v\) need to be replaced by \(\frac{{{E_1}}}{{1 - {v^2}}}\), \(\frac{{{E_2}}}{{1 - {v^2}}}\), \(\frac{{{\eta _1}}}{{1 - {v^2}}}\), and \(\frac{v}{{1 - v}}\), respectively.
The boundary conditions are given by [26]
where p denotes the vector of traction, \(\tilde {\mathbf{u}}\) and \(\tilde {\mathbf{p}}\) are the prescribed functions on the boundary.
Divide time domain into a number of time intervals, the initial points and sizes of the time intervals are defined by t0, t1, t2,…, tk… and T1, T2, …, Tk…, respectively. At the kth discretized time interval, to describe the variation of variables more precisely, all variables are expanded in terms of \({s_t}\)
where tk−1 and Tk represent the initial point and size of the kth time interval, respectively, σkm and εkm represent the expanding coefficients of σ and ε at kth time interval, respectively, m stands for the power order of expansion, bkm denotes the expanding coefficient of b, \(\mathbf{u}_{{}}^{{km}}\), \(\mathbf{p}_{{}}^{{km}}\), \(\tilde {\mathbf{u}}_{{}}^{{km}}\) and \(\tilde {\mathbf{p}}_{{}}^{{km}}\)are the expanding coefficients of u, p, \(\tilde {\mathbf{u}}\) and \(\tilde {\mathbf{p}}\), at kth time interval, respectively.
The conversion relationship between the differentiations with respect to t and st is
Substituting Eqs. (10–16) into Eqs. (1, 2, 5, 8, 9) then yields
At the first time interval (k = 1), when m = 0, i.e. t = 0,
\(\varvec{\upsigma}_{{}}^{{10}}\), \(\varvec{\upvarepsilon}_{{}}^{{10}}\), and \(\mathbf{u}_{{}}^{{10}}\) can be obtained by solving Eqs. (19–23).
At other time intervals (k = 2, 3,…)
For m ≠ 0, substituting Eqs. (10–11) in Eq. (4) then yields
Furthermore,
where
3 Recursive equations of EFG-SBM
The scaled boundary method introduces such a ξ–s coordinate system by scaling a defining curve relative to a scaling center (x0, y0) selected within the domain, as shown in Fig. 2. The coordinate ξ runs from the scaling center towards the curve, and has values of zero at the scaling center and unity at the curve. The coordinate s specifies a distance around the boundary from an origin on the boundary [12, 13].

Definition of the scaled coordinate system
The scaled boundary and Cartesian coordinate systems are related by the scaling equations [12]
where \(\mathbf{u}_{{}}^{{km}}(\xi ,s)\) represents the expanding coefficient of \(\mathbf{u}=\sum\nolimits_{{m=0}} {\mathbf{u}_{{}}^{{km}}s_{t}^{m}}\), \(\mathbf{N}(s)\) is a matrix of shape function and \(\mathbf{u}_{h}^{{km}}(\xi )\) is a set of \(n\) functions analytical in \(\xi\).
The expanding coefficient of the strain \(\varvec{\upvarepsilon}=\sum\limits_{{m=0}} {\varvec{\upvarepsilon}_{{}}^{{km}}s_{t}^{m}}\)in the scaled coordinate system is described by [12, 13]
where \({\mathbf{N}}{(s)_{,s}}\) refers to the derivative of \({\mathbf{N}}(s)\) with respect to s.
Utilizing the virtual displacement principle then gives (in the absence of body force) [12, 13]
m = 0, 1, 2, 3,… k = 1, 2, 3,… where
denotes the vector of virtual displacement, and
The second term in Eq. (38) becomes
Substituting Eqs. (23) and (29) into Eq. (38), respectively, then gives
Using Eqs. (34), (39–41) and Green’s Theorem then gives [5, 12]
where
In Eqs. (44) and (45) and the following section, \(\mathbf{u}_{{h,\xi }}^{{km}}\) and \(\mathbf{u}_{h}^{{km}}\) are used to represent \(\mathbf{u}_{{h,\xi }}^{{km}}(\xi =1)\) and \(\mathbf{u}_{h}^{{km}}(\xi =1)\).
In Eq. (44),
In Eq. (45),
Furthermore [5],
where
\(\mathbf{u}_{{}}^{{km}}(\xi )\) is approximated by
When \(\xi =1\)
where
Therefore,
where
Equations (58) and (61) can be further expressed by [5, 12, 13]
where
Left multiplying both sides of Eq. (55) with \({\varvec{\Phi}^{ - 1}}\) then yields
Thus,
The boundary is divided into several segments at each of which N(s) is defined by EFGM [5, 13, 29, 30].
where
nL is the total number of nodes at the lth segment. nx is the total number of nodes in the domain of definition of point s at the segment.
A spline weight function [5, 13] is employed in the form of
where \({s_I}\) is s coordinate of Ith node, and \({r_I}\) is the size of support domain.
Therefore,
where
In the recursive solution of Eq. (65), a self-adaptive computation is carried out at each of the time intervals with a convergence criterion
where β is an error bound, \(u_{{hj}}^{{km}}\) denotes the jth component of \(\mathbf{u}_{h}^{{km}}\) (m = 1, 2,…, R). Every \(\mathbf{u}_{h}^{{kR}}\)(R = 1, 2,…) is required to be checked with the above criterion, if the criterion is satisfied consecutively three times, computing will stop at current time interval, and step into the next one. If the criterion is not met, the next order (R + 1) computation will continue untill Eq. (77) meets.
In the computation, mm and mim, the upper and lower bound of R, will be prescribed in advance. If condition (77) is not satisfied when R = mm, a size decrement of time step is necessary to restart the recursive procedure at the current time interval; if condition (77) is satisfied when R < mim, a size increment of the time step can be considered at the next time interval.
In this paper, mm = 20, mim = 5, size increment and decrement are both half size of current time step.
4 Rotationally periodic symmetry
A structure or a computational region \(\Omega\) is said to possess rotationally periodic symmetry of order \(N\) when its geometry and physical properties are invariant under the following N symmetry transformations [23, 24]
where \({\Psi _i}\) represents a rotation of \(\Omega\) about its axis of rotation, \(\theta ={{2\pi } \mathord{\left/ {\vphantom {{2\pi } N}} \right. \kern-0pt} N}\), and N is defined as the order of symmetry. In Fig. 3, \(N=6\).

A rotationally periodic plane plate with \(N=6.\) The symmetric node orbits OA, OB and their corresponding symmetric coordinate system for reference
Designate the boundary of \(\Omega\) as \(\varGamma\) that is naturally divided into \(N\) identical parts\({\varGamma _i}\) (\(i=1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} ...{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} ,N\)). \({\varGamma _i}\) is arranged in an anti-clock wise sequence, i.e.
Equation (79) means that \({\varGamma _i}\) can be obtained from \({\varGamma _1}\), which is called ‘basic region’ and can be arbitrarily chosen from those identical parts. For any node or integration point in the basic region, there are certainly other \(N - 1\) different nodes or integration points, which are located symmetrically on the other \(N - 1\) symmetry regions. All these \(N\) nodes constitute a set of symmetric nodes, which is called symmetric node orbit, and is designated as \({\kern 1pt} {O_A}\)
In Fig. 3, it is readily seen that the six interface nodes \({\kern 1pt} {B_i}\) (\(i=1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} ...{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} ,N\)) constitute orbit \({\kern 1pt} {O_B}\). Only those nodes that are located on the internal part and the ‘right’ interface of \({\varGamma _1}\) are regarded as belonging to the basic region. Only \({\kern 1pt} {B_1}\) is regarded as belonging to \({\varGamma _1}\) and \({\kern 1pt} {B_2}\) will then be regarded as belonging to \({\varGamma _2}\).
5 An EFG-SBM-based partitioning algorithm
Consider a cyclically symmetric structure with order \(N\) and divide \(\varGamma\) into\(N\) cyclically symmetric segments. There are M nodes at each segment.
\(\mathbf{u}_{h}^{{km}}\) in the x–y coordinate system is described by
where sub-vector \({\left[ {\mathbf{u}_{h}^{{km}}} \right]^i}\) belongs to the ith symmetry region.
In such an ordering way, the coefficient matrices \({{\mathbf{Z}}_{11}}\), \({{\mathbf{Z}}_{12}}\), \({{\mathbf{Z}}_{21}}\) and \({{\mathbf{Z}}_{22}}\) in Eq. (62) can be written as
In a symmetry-adapted reference coordinate system, \(\mathbf{u}_{h}^{{km}}\) and \(\mathbf{P}_{{}}^{{*km}}\) are replaced by
where
where \({\mathbf{\bar {u}}}_{h}^{{km}}\) and \({\mathbf{\bar {P}}}_{{}}^{{*km}}\) are defined via Eq. (80).
Substituting Eqs. (83a, 83b) into Eq. (65) and left-multiplying both sides of Eq. (65) with \({{\mathbf{T}}^M}^{{\text{T}}}\) then yield
where
Substituting Eqs. (89a, b) into Eq. (62) and left-multiplying both sides of Eq. (62) with \({{\mathbf{T}}^M}^{{\text{T}}}\) then yield
i.e.
where
It can be proved that \({{\mathbf{\bar {Z}}}_{11}}\), \({{\mathbf{\bar {Z}}}_{12}}\), \({{\mathbf{\bar {Z}}}_{21}}\) and \({{\mathbf{\bar {Z}}}_{22}}\) are block-circulant [23], i.e.
In addition to this, \(\bar {\mathbf{E}}_{0}^{{}}={\mathbf{T}}_{{}}^{{M{\text{T}}}}\mathbf{E}_{0}^{{}}{\mathbf{T}}_{{}}^{M}\), \(\bar {\mathbf{E}}_{1}^{{}}={\mathbf{T}}_{{}}^{{M{\text{T}}}}\mathbf{E}_{1}^{{}}{\mathbf{T}}_{{}}^{M}\), and \(\bar {\mathbf{E}}_{2}^{{}}={\mathbf{T}}_{{}}^{{M{\text{T}}}}\mathbf{E}_{2}^{{}}{\mathbf{T}}_{{}}^{M}\) are also block circulant [23].
To partition the computing processes of Eqs. (86) and (91), \({\mathbf{\bar {u}}}_{h}^{{km}}\) and \({\mathbf{\bar {P}}}_{{}}^{{*km}}\) are transformed via \(\left[ {e_{1}^{{}},e_{2}^{{}}, \ldots ,e_{N}^{{}}} \right]\) that is a group of complete orthogonal basis vectors [23, 24]
where
\({{\mathbf{I}}^M}\) is a 2M-dimensional unit matrix. \({e_{rs}}\) is the sth element of \({{\mathbf{e}}_r}\) defined by
where \(\left[ {{{\left( {N - 1} \right)} \mathord{\left/ {\vphantom {{\left( {N - 1} \right)} 2}} \right. \kern-0pt} 2}} \right]\) refers to the largest integer that does not exceed \({{\left( {N - 1} \right)} \mathord{\left/ {\vphantom {{\left( {N - 1} \right)} 2}} \right. \kern-0pt} 2}\).
Substituting Eqs. (94a, b) into Eq. (86) and left-multiplying both sides of Eq. (86) with \({{\mathbf{E}}^M}^{T}\) then yield
where
Left multiplying two sides of Eq. (91) with \({{\mathbf{E}}^M}^{T}\)and substituting Eqs. (100a, b) into Eq. (91), one has
where
\({{\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{Z} }}_{11}}\), \({{\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{Z} }}_{12}}\), \({{\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{Z} }}_{21}}\) and \({{\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{Z} }}_{22}}\) are block-diagonal, i.e.
where \(\oplus\) represents the direct sum of matrices.
Equation (103) indicates that Eq. (101) can be partitioned into \([{{\left( {N+2} \right)} \mathord{\left/ {\vphantom {{\left( {N+2} \right)} 2}} \right. \kern-0pt} 2}]\) independent sub-eigenvalue-problems, i.e.
Based on Laplace theorem [31], it can be proved that the eigenvalues of Eq. (101) are the eigenvalues of Eq. (104). \(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\varvec{\Phi}}\) consists of
\(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\varvec{\Phi}} _{{}}^{1}\) is related to \(r=0\) via
When \(N\) is even, \(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\varvec{\Phi}} _{{}}^{N}\) is related to \(r={N \mathord{\left/ {\vphantom {N 2}} \right. \kern-0pt} 2}\) via
\(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\varvec{\Phi}} _{{}}^{j}\) (j = 2r, or 2r + 1) is related to \(r=1,2, \ldots ,\left[ {{{\left( {N - 1} \right)} \mathord{\left/ {\vphantom {{\left( {N - 1} \right)} 2}} \right. \kern-0pt} 2}} \right]\) via
Definitely, \(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\phi } _{i}^{{j{\text{T}}}}\)(i = 1, 2, … 2M; j = 1, 2, … N) is linearly independent of each other.
\({\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{Q} }}\) is constituted by
where \({\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{Q} }}_{{}}^{j}{\mathbf{=[\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{q} }}_{1}^{j},...{\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{q} }}_{i}^{j},...{\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{q} }}_{{2M}}^{j}{\mathbf{]}}\), and \({\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{q} }}_{i}^{j}\) can be constituted in a similar way.
Therefore,
The dimension of \({\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\Phi } }}_{0}^{*}\) is 2M, the dimension of \({\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\Phi } }}_{i}^{*}\), \(\left( {i=1, \ldots ,nsp - 1} \right)\) is 2 × 2M, and the dimension of \({\mathbf{\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\Phi } }}_{{nsp}}^{*}\) is 2M or 2 × 2M if N is even or odd.
Substituting Eqs. (108a, b) into Eq. (98) then gives
and
where
\(\left[ {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\mathbf{u}} _{h}^{{km}}} \right]_{{}}^{1}=\left[ {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\mathbf{u}} _{h}^{{km}}} \right]_{0}^{{}}\); \(\left[ {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\mathbf{u}} _{h}^{{km}}} \right]_{{}}^{N}=\left[ {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\mathbf{u}} _{h}^{{km}}} \right]_{{{N \mathord{\left/ {\vphantom {N 2}} \right. \kern-0pt} 2}}}^{{}}\) (when \(N\) is even)
When load distribution and displacement constraint are both rotationally symmetric,
One only needs to solve the first sub-problem in Eq. (113) because other [N/2] subproblems have zero solutions.
No matter the load distribution and displacement constraint are rotationally symmetric or not, the solution of Eq. (62) can be computationally partitioned via Eq. (101), and \(\mathbf{K}\)can be generated via
and
When displacement constraints are rotationally symmetric, Eq. (65) can be solved by solving a series of smaller independent problems described by Eq. (110). When displacement constraints are not rotationally symmetric, Eq. (65) can be solved using \(\mathbf{K}\) generated via Eqs. (114–115).
Consequently, the computing expense of EFG-SBM via a combination with a temporally piecewise adaptive algorithm can be significantly reduced by the exploration of cyclic symmetry.
6 Numerical examples
Two numerical examples are given to verify the proposed algorithm, and all the computations are carried out on a PC with 3.10 GHz CPU and 4G RAM.
Both are the creep analyses, assuming that b = 0, \(\tilde {\mathbf{u}}\) = 0, \(\tilde {\mathbf{p}}\) is time independent and β = 1 × 10−5.
6.1 Numerical example 1
Consider a regular octagonal gear subjected to a uniform pressure on one edge as shown in Fig. 4 where q = 1 N/m, R1 = 1 m and R2 = 2 m. There are eight hinged supports at concave corner points. Plane stress conditions are assumed with E1 = 1000 Pa, E2 = 2000 Pa, η1 = 2 × 104 N s/m2 and ν = 0.3. 30 nodes are uniformly arranged at every edge. All geometric, physical properties and constraints are cyclic symmetry with N = 8.

A regular octagonal gear in the numerical example 1
The result obtained by the proposed approach is compared with a reference solution [28] whose elastic solution is given by ANSYS with 12,779 nodes and 4078 8-node-quadrangle finite elements. The solution of ux at point 2 is presented in Table 1 and Fig. 5. The maximum relative error between the proposed algorithm and reference solution is about 3.76%. The solution of uy at node A is presented in Table 2 and Fig. 6. The maximum relative error is about 2.86%. Initial time step is assumed with T0 = 100 s and then the algorithm would adaptively decrease half size of initial time step to restart computing at the first time interval. Size of time step is adaptively incremented to 75 s at the sixth time interval. A comparison of computing expense is given in Table 3.

Numerical comparison of ux at point 2

Numerical comparison of uy at node A
6.2 Numerical example 2
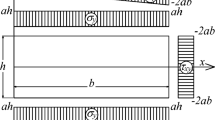
Consider a regular octagonal plane plate subjected to a uniform tangential force p = 1 N/m along the boundaries, as shown in Fig. 7, where R = 1 m. Plane stress conditions are assumed with E1 = 1000 Pa, E2 = 2000 Pa, η1 = 2 × 104 N s/m2 and ν = 0.3. Sizes of time steps are adaptive and initial time step is assumed with T0 = 100 s. There are eight hinged supports along the boundaries. 100 nodes are uniformly arranged at each sub-cyclic symmetry region. All geometric, physical properties, constraints and load conditions are cyclic symmetry with N = 8.

A regular 8-edge plate subjected to a tangential distributed force along the boundaries
The result obtained by the proposed approach is compared with a reference solution [28] whose elastic solution is given by ANSYS with 73,033 nodes and 24,448 8-node-quadrangle finite elements. The solution of uy at node A is presented in Table 4 and Fig. 8. The maximum relative error between the proposed algorithm and reference solution is about 2.07%. The solution of ux at point B is presented in Table 5 and Fig. 9. The maximum relative error is about 1.87%. A comparison of computing expense is given in Table 6. Figures 10 and 11 exhibit the adaptive procedures of size of time interval and power order, respectively.

Numerical comparison of uy at node A

Numerical comparison of ux at point B

Size of time interval

The max power order of expansion at each time interval
7 Computing remarks
-
1.
In comparison with ANSYS, a sufficient computing accuracy can be provided by the proposed algorithm, as shown in Tables 1, 2, 4 and 5, and Figs. 5, 6, 8 and 9. Both examples need a FEM-based convergent elastic solution that requires more DOF of unknowns in comparison with EFG-SBM. In example 2, the proposed algorithm needs only 1600 DOF, the convergent elastic solution given by ANSYS needs 146,066 DOF. An ANSYS-based viscoelastic analysis for this problem may lead to more DOF.
-
2.
Figure 10 exhibits the adaptive procedure of size of time interval. When creep tends to a stable state, the variation of displacement becomes less and less, and the size of time step gradually becomes relative bigger in the adaptive process. When the size of time step is enlarged, more recursive computing may be required to satisfy Eq. (77) as shown in Fig. 11. In Table 6 of example 2, we see that the computational expense at the first time interval is the most more than other time intervals. It is because that the convergence criterion (77) could not be satisfied even when R = mm and then the algorithm would adaptively decrease half size of initial time step to restart computing as shown in Fig. 10.
-
3.
Exploiting cyclical symmetry, a substantial speed-up can be achieved in solving viscoelastic problems by EFG-SBM, as shown in Tables 3 and 6.
8 Conclusions
The objective of this paper is to utilize the cyclic symmetry to improve the computational efficiency in a EFG-SBM based recursive solution process for the numerical viscoelastic analysis. The major contributions include:
-
1.
An EFG-SBM-based partitioning algorithm via a combination with a temporally piecewise adaptive algorithm is presented. Then both eigenvalue and system equations can be partitioned into a number of smaller problems which can be solved independently, and thereby the computational efficiency is significantly improved;
-
2.
In the whole recursive process of the partitioning algorithm, the eigenvalue equations and the stiffness matrix need to be solved only one time.
-
3.
Since the proposed partitioning algorithm facilitates to be parallelized, a higher computing efficiency can be expected.
References
Christensen RM (1982) Theory of viscoelasticity: an introduction. Academic Press, Cambridge
Ahmadi E, Barikloo H, Kashfi M (2016) Viscoelastic finite element analysis of the dynamic behavior of apple under impact loading with regard to its different layers. Comput Electron Agr 121:1–11
Ashrafia H, Shariyata M, Khalilia SMR, Asemib K (2013) A boundary element formulation for the heterogeneous functionally graded viscoelastic structures. Appl Math Comput 225:246 – 62
Han Z, Yang HT, Liu L (2006) Solving viscoelastic problems with cyclic symmetry via a precise algorithm and EFGM. Acta Mech Sinica 22:170–176
Guo XF, Yang HT (2016) A combination of EFG-SBM and a temporally-piecewise adaptive algorithm to solve viscoelastic problems. Eng Anal Bound Elem 67:43–52
Xu QW, Prozzi JA (2015) A time-domain finite element method for dynamic viscoelastic solution of layered-half-space responses under loading pulses. Comput Struct 160:20–39
Kalyania VK, Pallavikab SK, Chakrabortyb (2014) Finite-difference time-domain method for modelling of seismic wave propagation in viscoelastic media. Appl Math Comput 237:133 – 45
Wolf JP, Song Ch (1996) Consistent infinitesimal finite element cell method: three dimensional vector wave equation. Int J Numer Methods Eng 39:2189–2208
Wolf JP, Song Ch (1996) Finite-element modelling of unbounded media. Wiley, Chichester
Wolf JP, Song Ch (2000) The scaled boundary finite-element method—a primer: derivation. Comput Struct 78:191–210
Wolf JP, Song Ch (2001) The scaled boundary finite-element method—a fundamental solution-less boundary-element method. Comput Methods Appl Mech Eng 190:5551–5568
Deeks AJ, Wolf JP (2002) A virtual work derivation of the scaled boundary finite-element method for elastostatics. Comput Mech 28:489–504
Deeks AJ, Augarde CE (2005) A meshless local Petrov-Galerkin scaled boundary method. Comput Mech 36:159–170
Lin G, Lu S, Liu J (2015) Duality system-based derivation of the modified scaled boundary finite element method in the time domain and its application to anisotropic soil. Appl Math Model 40:5230–5255
Ooi ET, Yang ZJ (2010) Modelling crack propagation reinforced concrete using a hybrid finite element-scaled boundary finite element method. Eng Fract Mech 78:252 – 73
Ooi ET, Yang ZJ (2010) A hybrid finite element-scaled boundary finite element method for crack propagation modelling. Comput Method Appl Mech Eng 199:1178–1192
Ooi ET, Yang ZJ (2011) Modelling dynamic crack propagation using the scaled boundary finite element method. Int J Numer Method Eng 88:329–349
Yang ZJ, Deeks AJ, Hao H (2007) Transient dynamic fracture analysis using scaled boundary finite element method: a frequency domain approach. Eng Fract Mech 74:669 – 87
Bazyar MH, Talebi A (2015) Scaled boundary finite-element method for solving nonhomogeneous anisotropic heat conduction problems. Appl Math Model 39:7583–7599
Hell S, Becker W (2015) The scaled boundary finite element method for the analysis of 3D crack interaction. J Comput Sci 9:76–81
Zhong WX, Qiu CH (1983) Analysis of symmetric or partially symmetric structures. Comput Methods Appl Mech Eng 38:1–18
Wu GF, Yang HT (1994) The use of cyclic symmetry in two-dimensional elastic stress analysis by BEM. Int J Solids Struct 31:279–290
Guo XF, He YQ, Yang HT (2015) An EFG-SBM based partitioning algorithm for two-dimensional elastic analysis of cyclically symmetrical structures. Eng Computation 32(2):452–472
Yang HT, Guo XF, He YQ (2015) An EFG-SBM based partitioning algorithm for heat transfer analysis of cyclically symmetrical structures. Finite Elem Anal Des 93:42–49
Chongshuai Wang Y, He H Yang (2016) A piecewise partitioning scaled boundary finite element algorithm to solve viscoelastic problems with cyclic symmetry. Eng Anal Bound Elem 73:120–125
Zienkiewicz OC, Morgan K (1983) Finite element and approximation. Wiley, New York
Shames IH, Cozzarelli FA (1992) Elasitc and inelastic stress analysis. Prentice Hall, Englewood Cliffs
Cai E (1989) The foundation of viscoelastic mechanics. Beihang University Press, Beijing
Belytschko T, Lu YY, Gu L (1994) Element-free Galerkin methods. Int J Numer Methods Eng 37:229–256
Belytschko T, Krongauz Y, Organ D (1996) Meshless methods: an overview and recent developments. Comput Methods Appl Mech Eng 139:3–47
Lin HT, Li CY, Zhang NY (1994) Linear algebra. Tian Jin University Press, Tian Jin
Acknowledgements
The research leading to this paper is funded by NSF [11572068], NKBRSF [2015CB057804], Natural Science Funding of Liaoning Province [201602115].
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Guo, X., Yang, H. Solving viscoelastic problems with cyclic symmetry via a temporally adaptive EFG-SB partitioning algorithm. Engineering with Computers 35, 101–113 (2019). https://doi.org/10.1007/s00366-018-0586-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-018-0586-6