
Abstract
The development of high-speed volumetric laser-induced fluorescence measurements of formaldehyde (\(\hbox {CH}_2\hbox {O}\)-LIF) using a pulse-burst laser operated at a repetition rate of \({100} \hbox { kHz}\) is presented. A novel laser scanning system employing an acousto-optic deflector (AOD) enables quasi-4D \(\hbox {CH}_2\hbox {O}\)-LIF imaging at a scan frequency of \({10}\hbox { kHz}\). The diagnostic capability of time-resolved volumetric imaging is demonstrated in a partially premixed DME/air lifted turbulent jet flame near the flame base. Simultaneous imaging of laser beam profiles is performed to account for the laser pulse energy fluctuation and laser sheet inhomogeneity. With the accurate registration of laser sheet positions, the volumetric reconstruction of \(\hbox {CH}_2\hbox {O}\)-LIF signals is performed within a detection volume of \(17.3 \times 11.9 \times {2.3}\, \hbox { mm}^3\) with an average out-of-plane spatial resolution of \({250}\,\upmu \hbox {m}\). A surface detection algorithm with adaptive thresholding is used to determine the global maximum intensity gradient by calculating gradient percentiles. The flame topology characteristics are investigated by evaluating the 3D curvatures of \(\hbox {CH}_2\hbox {O}\) surfaces. Curvatures calculated using 2D data systematically underestimate the full 3D curvature due to the lack of out-of-plane information. The inner surfaces near the turbulent fuel jet exhibit higher probabilities of large mean curvature than the outer surfaces. The saddle and cylindrical structures are dominant on both the inner and outer surfaces and the elliptic structures occur with lower probability. The results suggest that the damping of turbulent fluctuations by the temperature increase through the \(\hbox {CH}_2\hbox {O}\) region reduces the curvature, but the local structure topology remains self-similar.
Graphic abstract

Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Laser-based techniques play a vital role in non-intrusive scalar and velocity measurements for investigating flame–turbulence interactions. Diagnostic techniques such as particle image velocimetry (PIV) and laser-induced fluorescence (LIF) have been employed extensively for two-dimensional measurements. However, turbulent flows are inherently three-dimensional and evolve in time. Conventional two-dimensional imaging measurements lack information on the out-of-plane motion and the temporal evolution of turbulent flows, leading to ambiguities in data interpretation (Boxx et al. 2009). To understand the inherent multi-dimensional transient phenomena in turbulent reacting flows, extension of planar single-shot measurements to high-speed volumetric measurements is required.
Approaches to accommodate laser-based volumetric measurements have been continuously developed in the recent years and can be classified into two categories, namely volumetric laser illumination and the multiple laser sheets approach. For the volumetric laser illumination, the laser beam is shaped into a collimated laser slab of a few millimeters in thickness and multiple cameras from various viewing angles are employed for simultaneous signal detection. Tomographic reconstructions from the collected line-of-sight signals are performed using various algorithms, such as algebraic reconstruction techniques (ART) (Ma et al. 2017a, b; Wu et al. 2015) and simultaneous multiplicative algebraic reconstruction techniques (SMART) (Halls et al. 2017a; Li et al. 2018; Pareja et al. 2019). For example, high-speed volumetric velocity measurements using tomographic PIV have been successfully demonstrated in various turbulent flames (Coriton et al. 2014; Zhou and Frank 2019) and in-cylinder flows of IC engines (Baum et al. 2013; Peterson et al. 2017). Single-shot and high-speed volumetric scalar measurements of a number of key species such as CH (Wu et al. 2015), OH (Halls et al. 2017b; Li et al. 2018; Pareja et al. 2019) and fuel tracers (Halls et al. 2016, 2017a; Ma et al. 2017b) have been realized in both laminar and turbulent flames. To obtain a sufficient signal-to-noise ratio (SNR) as well as reasonable spatial and temporal resolutions, volumetric measurements are constrained by the availability of high laser repetition rates, high pulse energy, beam profile homogeneity and the number of camera views. Obtaining high laser repetition rates and high pulse energy simultaneously can be a challenge not only from the aspect of laser manufacturing but also for optical components to sustain tremendous amounts of laser power. In addition, the obtainable spatial resolution is typically limited by the number and the orientation of camera views (Li et al. 2018). Despite the fact that the tomographic reconstruction process involves solving an inherently underdetermined problem, 6–8 camera views are typically required to obtain a spatial resolution smaller than \({1} \hbox { mm}\) in laminar flames with a probe volume of 30 \(\times \) 30 \(\times \)\({30}\hbox { mm}^3\) (Li et al. 2018). Practically obtainable spatial resolutions in turbulent flames are expected to degrade further as the highly convoluted turbulent flame structures add another level of complexity for tomographic reconstruction. The above-mentioned limitations substantially constrain the implementation of such volumetric laser illumination approaches in reacting flows.
For the multiple laser sheet approach, the probe volume is sliced by multiple parallel laser sheets and a time interval that is smaller than the characteristic flow time scale is used to separate the laser sheets in time. A single camera that is synchronized with the multiple laser sheets is typically employed to record the images from various planes that are used for volumetric reconstruction. Multiple laser sheets can be achieved using multiple static laser sources (Bode et al. 2017; Peterson et al. 2015; Shimura et al. 2011; Trunk et al. 2013), multiple wavelengths generated from a single source (Frank et al. 1991) or a single laser sheet rapidly sweeping through the volume of interest. The latter approach, which is referred to as the laser scanning technique, has been realized in the past using mechanical mirrors, i.e. oscillating mirrors (Kychakoff et al. 1987; Yip et al. 1988) and rotating polygonal mirrors (Patrie 1994). Among recent investigations, kHz-rate imaging has been used for flow field measurements (Wellander et al. 2011), mixture fraction visualization (Miller et al. 2014), and flame front and reaction zone detection (Olofsson et al. 2006; Weinkauff et al. 2015; Wellander et al. 2014). Compared to the volumetric laser illumination approach, the multiple laser sheet approach offers a better in-plane spatial resolution, less constraints on the laser pulse energy and the number of camera views. However, in addition to the laser safety issue (Weinkauff et al. 2015), the intrinsic limitations associated with the mirror-based scanners are the high mass inertia and instability of the moving mechanical parts, which restricts the accuracy and precision of the laser beam position, especially at high scanning speeds.
A recently demonstrated alternative to mirror-based scanners is multiple laser sheet generation using an acousto-optic deflector (AOD), which does not contain any moving parts and is therefore advantageous over the mirror-based scanners in terms of scan frequency, accuracy, precision and spatial resolution (Römer and Bechtold 2014). Employing \({532}\hbox { nm}\) laser radiation, kHz-rate volumetric visualizations using an AOD have been demonstrated in a turbulent lifted jet flame by means of Mie scattering (Li et al. 2017) and in-cylinder flow measurements in an IC engine via multi-plane PIV (Bode et al. 2019). However, 4D mapping of chemical species such as OH radicals and \(\hbox {CH}_2\hbox {O}\) in turbulent flames using an AOD scanning system has not been reported in the literature. The LIF excitation of such intermediate species often requires an excitation wavelength in the UV range which imposes additional requirements on the AOD crystal material and restrictions on the maximal obtainable scan angle. In addition, to capture motions of higher Reynolds number flow, laser repetition rates that are significantly higher than \({10}\hbox { kHz}\) are typically desired.
The present work demonstrates the recent advancement in quasi-4D laser-induced fluorescence measurements of formaldehyde (\(\hbox {CH}_2\hbox {O}\)-LIF) in a partially premixed DME/air lifted turbulent jet flame by employing an AOD scanning system combined with a pulse-burst laser operated at a repetition rate of \({100}\hbox { kHz}\). In the following sections, the experimental methods are first introduced. The \(\hbox {CH}_2\hbox {O}\) reconstruction is performed and the three-dimensional \(\hbox {CH}_2\hbox {O}\) surface detection with an adaptive thresholding method is then described. An evaluation of flame topology and curvatures from the 3D \(\hbox {CH}_2\hbox {O}\)-LIF measurements is performed to characterize the flame structures close to the base of the lifted turbulent flame.
2 Experimental methodology
2.1 Acousto-optic deflection
As schematically illustrated in Fig. 1, a typical AOD scanning system consists of a function generator, a radio frequency (RF) driver and an acousto-optic crystal. The piezo-transducer attached on the crystal surface is driven by RF signals to generate a high-frequency acoustic wave propagating through the crystal. The acoustic frequency f is directly controlled by the DC voltage assigned by the function generator. The acoustic wave induces local rarefaction and compression in the crystal, leading to periodical changes in the material density. As a consequence, the local refractive index varies periodically and the crystal serves as an optical diffraction grating. When the AOD is operated in the Bragg regime, the interaction length L that the laser travels through the crystal must satisfy
where \(\varLambda \) denotes the acoustic wavelength and \(\lambda \) is the wavelength of the incident laser. The maximum intensity of the first diffraction order is then located at a particular incident angle \(\theta _i = \theta _B\), where \(\theta _B\) is the Bragg angle that is a function of the acoustic frequency (f) and acoustic velocity (\(\nu \)) in the crystal as expressed in Eq. (2),
The separation angle \(\theta _d\) is twice the Bragg angle, namely
In the present measurements, \(\lambda \) and \(\nu \) are constant and \(\theta _d \) is solely determined by the acoustic frequency f, which shows nearly linear response to the DC voltage level applied. The AOD used in the current work comprised a water-cooled quartz crystal (D1340, ISOMET) and a tunable RF driver (RFA333, ISOMET). The DC voltage in a range of 0–\({10}\hbox { V}\) was generated from an arbitrary waveform generator (33500B Series, Keysight), resulting in a frequency bandwidth, \(\varDelta f\), of 40 MHz and a maximum scan angle \(\theta _s \approx {\lambda \varDelta f }/{\nu }\) of \({2.3}\hbox { mrad}\). A maximum diffraction efficiency of 70% in first diffraction order was obtained and optimized for \({355}\hbox { nm}\) at the center acoustic frequency \(f_c= {120}\,{\hbox {MHz}}\). For other acoustic frequencies, the diffraction efficiency remained above 60% over the complete range of scan angles.

Schematic of the acousto-optic deflector system with the laser deflection in the Bragg regime (Bragg angle \(\theta _{B}\)). First-order beam shows a separation angle range between \(\theta _{d,min}\) and \(\theta _{d,max}\) as the acoustic frequency varies between \(f_{min}\) and \(f_{max}\). Scan angle \(\theta _{s} = \theta _{d,max}\) - \(\theta _{d,min}\)
2.2 Laser-induced fluorescence of \(\hbox {CH}_2\hbox {O}\)
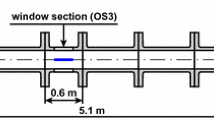
To demonstrate the feasibility and capability of a \({100}\hbox { kHz}\) pulse-burst laser combined with an AOD scanning system for quasi-4D \(\hbox {CH}_2\hbox {O}\)-LIF imaging, a partially premixed lifted turbulent DME/air jet flame was investigated. \(\hbox {CH}_2\hbox {O}\) is a key intermediate species that marks the fuel decomposition/consumption process (Gabet et al. 2013). The entire experimental setup is schematically shown in Fig. 2. The burner consisted of an air co-flow of \({76}\hbox { mm}\) inner diameter and a central nozzle of \({2.5}\hbox { mm}\) inner diameter supplied with a fuel-rich DME/air mixture. The co-flow bulk velocity was 0.2 m/s and the bulk velocity at the exit of the nozzle was approximately \({17}\hbox { m/s}\), resulting in a Reynolds number of approximately 4500. The jet DME/air mixture had an equivalence ratio of 9.5, forming a lifted flame with an average lift-off height of approximately \({25}\hbox { mm}\) above the jet exit. The flow field was measured by particle image velocimetry (not shown here) and the mean gas velocity at the flame stabilization position was \({0.5}\hbox { m/s}\). The flame propagation during a scan sequence (\({100}\,\upmu \hbox {m}\)) was estimated to be \({0.05}\hbox { mm}\).

Experimental setup for quasi-4D \(\hbox {CH}_2\hbox {O}\)-LIF measurements in a turbulent lifted DME/air jet flame using an AOD scanning system
The \(\hbox {CH}_2\hbox {O}\)-LIF was excited using the third harmonic (\(\lambda = {355}\hbox { nm}\)) of the pulse-burst laser, which provided a \({5}\hbox { ms}\) duration burst of pulses at \({100}\hbox { kHz}\). The laser pulses were synchronized with the AOD scanning system by a function generator that supplied a voltage step function (Li et al. 2018) with a \({10}\, \upmu \hbox {s}\) step width and a \({100}\, \upmu \hbox {s}\) cycle period to the AOD. This provided a \({10}\hbox { kHz}\) scanning frequency with 10 planes in each scan cycle. The average pulse energy was \({2.0}\hbox { mJ}\) and the pulse duration was \({7}\hbox { ns}\). A UV-coated cylindrical telescope composed of a plano-concave lens (\(L_{1}\), \(f_{1}\) = - \({350}\hbox { mm}\)) and a plano-convex lens (\(L_{2}\), \(f_{2} = + {750}\hbox { mm}\)) expanded the laser beam vertically. With a plano-convex cylindrical lens (\(L_{3}\), \(f_{3} = + {1000} \hbox { mm}\)), the laser sheets were parallelized and focused to a thickness of \({100}\,\upmu \hbox {m}\). The \(\hbox {CH}_2\hbox {O}\) fluorescence signal was collected perpendicularly to the laser sheets by a high-speed CMOS camera (Fastcam SA-X2, Photron) coupled with a high-speed lens-coupled image intensifier (HICATT, Lambert Instruments). The intensified camera was equipped with a \({58}\hbox { mm}\) lens (Nikkor, f/2.8, depth of field > \({3}\hbox { mm}\)). A \({500}\hbox { nm}\) (Schott) short-pass filter and a \({355}\hbox { nm}\) notch filter (Semrock) suppressed flame luminosity and laser scattered light. The CMOS camera was operated at \({100}\hbox { kHz}\) with \(384 \times 264\) active pixels and was synchronized with the image intensifier, the pulse-burst laser and the AOD scanning system. Individual \(\hbox {CH}_2\hbox {O}\)-LIF images were recorded with 75% of the maximum intensifier gain and a 250 ns gate to suppress background luminosity. Using these settings, signal cross-talk from flame luminosity was negligible as compared to the \(\hbox {CH}_2\hbox {O}\) fluorescence signal. The recorded images exhibited an in-plane projected pixel size of \({45}\,\upmu \hbox {m}\) and a field of view (FOV) of \(17.3 \times {11.9}\,\hbox { mm}^2\). The variation in FOV size was negligible and was examined by traversing an imaging target along the z-axis. The imaging resolution was evaluated to be approximately \({175}\,\upmu \hbox {m}\) using USAF resolution test chart.
2.3 Beam profile imaging and laser position registration
To account for energy fluctuations as well as laser sheet inhomogeneities for individual pulses from a burst, the beam profile was simultaneously imaged using an additional beam profiling CMOS camera (Phantom 7.3) with an integrated fiber-coupled intensifier (P24, Hamamatsu). The beam profiling camera was equipped with a \({58}\hbox { mm}\) lens (Nikkor, f/2.8, depth of field > \({3}\hbox { mm}\)) and a \({355}\hbox { nm}\) notch filer. Beam profiles were recorded by LIF imaging in a laminar flow of air and biacetyl (\(\hbox {C}_4\hbox {H}_6\hbox {O}_2\)) vapor that was excited by the same \({355}\hbox { nm}\) laser sheets as shown in Fig. 2. The biacetyl flow was placed in front of the jet burner and the loss in laser pulse energy via biacetyl vapor absorption was measured to be negligible (< 2%). Operating at \({100}\hbox { kHz}\) with \({500}\hbox { ns}\) gate, the beam profiling camera provided a frame size of 64 \(\times \) 256 pixels and a pixel resolution of \({56}\,\upmu \hbox {m}\)/pixel. A snapshot of biacetyl fluorescence is shown in Fig. 3a, from which the laser sheet profile plotted in Fig. 3b was obtained by horizontally averaging the recorded image.
The accurate position registration of the individual laser sheets was essential for accurate three-dimensional reconstruction. The parallelization of the multiple laser sheets and their thickness in the focus plane were measured on a beam monitor camera (WinCamD-LCM, Dataray). Figure 3c shows relative positions of the ten parallel tightly focused laser sheets at the focus plane and the corresponding vertically averaged intensity profile is shown in Fig. 3d. The total scan depth was measured to be \({2.3}\hbox { mm}\). To examine the parallelization of the laser sheets, the beam monitor camera was traversed approximately \(\pm {15}\hbox { mm}\) along the laser propagation direction (x-axis) across the measurement volume. The maximum deviation of the total scan depth was less than \({100}\,\upmu \hbox {m}\) (\(\sim \) 4% of scan depth), indicating a reliable parallelization between laser sheets. The impact on reconstruction accuracy was considered to be negligible.
The discretization of illumination planes along the z-axis was not equidistant since the separation of the planes depended on the incident angle of the laser sheets to the converging lens (\(L_3\)). The z-discretization between the laser sheets varied from 198 to \({286}\,\upmu \hbox {m}\) (\({250}\,\upmu \hbox {m}\) on average) depending on the laser sheet position. The size of the largest vortical structures in the flow field were estimated by the integral length scale at the flame base using \(L_{base} \approx 0.07\times l_{lift-off}\) = \({1.75}\hbox { mm}\) (Gautam 1984). The average out-of-plane spatial resolution was approximately 1/7 of the integral length scale and thus was sufficient to resolve these structures.

a Single-shot biacetyl fluorescence image and b averaged vertical intensity profile. c Recorded positions of the parallel laser sheets at the focus plane and d average horizontal intensity profile
3 Data processing procedures
3.1 \(\hbox {CH}_2\hbox {O}\)-LIF signal reconstruction
For the signal reconstruction, the raw \(\hbox {CH}_2\hbox {O}\)-LIF images were first corrected for shot-to-shot laser energy fluctuation and sheet intensity inhomogeneity. The images were then filtered with 3 \(\times \) 3 median and 3 \(\times \) 3 Gaussian filters to reduce noise. To estimate the SNR, a laminar premixed DME/air flame that yielded comparable \(\hbox {CH}_2\hbox {O}\)-LIF signals to the turbulent jet flame was imaged with the same detection system. A SNR of approximately 15 was evaluated in a homogeneous \(\hbox {CH}_2\hbox {O}\) region without applying image filters. With the accurate position of each individual laser sheet as registered by the beam position camera, the raw images from each of the ten planes were assigned to the corresponding z-positions to form a 3D signal matrix representing an entire detection volume of 17.3 \(\times 11.9 \times {2.3}\,\upmu \hbox {m}^3\). The volumetric matrix was linearly interpolated in the z-direction such that the spacing between the adjacent z-planes was approximately \({45}\,\upmu \hbox {m}\) which was identical to the spatial pixel resolution in the x–y-plane. The entire probe volume was then represented by 384 \(\times \) 264 \(\times \) 50 voxels of \({45}\, \upmu \hbox {m}^3\) and the \(\hbox {CH}_2\hbox {O}\)-LIF intensity was saved in a volumetric matrix \(V_\mathrm{raw}\).
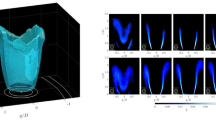
Figure 4 shows a single-shot 3D structure represented by the iso-contours of \(\hbox {CH}_2\hbox {O}\)-LIF signal intensity. The coordinate system (x, y, z) is centered in the reconstruction volume, which is approximately \({25}\hbox { mm}\) downstream of the jet nozzle exit. Two branches of the highly convoluted \(\hbox {CH}_2\hbox {O}\) structures can be readily observed. As the fuel-rich jet mixes with the ambient air upstream, mixtures approach stoichiometric conditions near the stabilization point which can be approximated as the lowest point in each branch of the 3D \(\hbox {CH}_2\hbox {O}\) structures (Gordon et al. 2012). Near the stabilization point, in the regions towards the fuel jet stream the mixtures remain fuel-rich, while mixtures towards the ambient flow are diluted by mixing with ambient air resulting in a fuel-lean mixture (Lyons 2007; Lawn 2009). However, the typical structure of a triple flame (Peters 2000) was not observed in this measurement. The two premixed branches are probably collapsed on the non-premixed tail (Kioni et al. 1993; Karami et al. 2016) and the \(\hbox {CH}_2\hbox {O}\) structure resembles an edge flame (Buckmaster 2002).
It can be seen from Fig. 4 that the inner layer (surfaces nearest to the jet axis) of the \(\hbox {CH}_2\hbox {O}\) structures is more wrinkled than the outer layer (surfaces nearest to the co-flow). The flame surface wrinkling and curvature are indicators that show the extent to which turbulence–flame interactions impact the flame topology, and the following data analysis focuses on the flame surface shape characteristics. The first step in this analysis is to detect the locations of the 3D flame surfaces.

Single-shot \(\hbox {CH}_2\hbox {O}\)-LIF signal reconstruction
3.2 \(\hbox {CH}_2\hbox {O}\) surface detection using adaptive thresholding
For 2D scalar measurements, edge detection is typically accomplished either by employing gradient-based algorithms such as the Canny method (Canny 1986) or by identifying an iso-intensity contour with fixed intensity thresholding. However, the local maximum of the three-dimensional scalar gradients can be highly dispersed in space and a simple correlation between an intensity threshold and local scalar gradient maximum cannot be easily determined (Pareja et al. 2019). To properly determine the boundary of a 3D \(\hbox {CH}_2\hbox {O}\) structure, we developed a surface detection algorithm using a similar approach to that proposed in the previous work (Pareja et al. 2019). The location of the \(\hbox {CH}_2\hbox {O}\) surface was defined here as a 3D iso-intensity contour at the intensity level (\(I_\mathrm{cont}\)) that coincides with the global gradient percentile as described below.
First, the 3D \(\hbox {CH}_2\hbox {O}\)-LIF signal matrices \(V_\mathrm{raw}\) were smoothed with a 3 \(\times \) 3 \(\times \) 3 Gaussian filter to reduce noise and the 3D \(\hbox {CH}_2\hbox {O}\)-LIF intensity gradients were calculated using a second-order central difference. For each instance, the 3D \(\hbox {CH}_2\hbox {O}\)-LIF intensity gradients were stored in an array and sorted by magnitude in ascending order in which zero gradient was not considered. A percentile gradient was determined from the value that is ranked as the ith percentile of the array. To select the percentile used to determine the intensity threshold, a sensitivity analysis was conducted as follows. Figure 5a shows an example of a plane of the 3D \(\hbox {CH}_2\hbox {O}\) structures with iso-gradient contours that correspond to the 10th (\(P_{10}\)), 20th (\(P_{20}\)), 30th (\(P_{30}\)), 40th (\(P_{40}\)) and 90th (\(P_{90}\)) percentile gradient values. The mean intensities \(I_\mathrm{cont}\) were then calculated as the average LIF signal within the region enclosed by the corresponding iso-gradient contours.
In Fig. 5b, the joint probability density function (JPDF) of normalized \(\hbox {CH}_2\hbox {O}\)-LIF intensity and its gradient from a 3D \(\hbox {CH}_2\hbox {O}\) matrix is plotted. A polynomial is fit to the non-zero JPDF data points as shown by the solid line. In addition, the intensities \(I_\mathrm{cont}\) (vertical dotted lines) and their projected points on the fitted curve are marked (solid circles). The peak location of the fitted curve is marked with a yellow cross, which is the representative global gradient maximum of this matrix. The intensity obtained from \(P_{20}\) correlates well with the global gradient maximum. Using various \(I_\mathrm{cont}\) for thresholding, edge detection is performed with selected intensity iso-lines to test sensitivities. The intensity thresholds of \(I_\mathrm{cont}\)(\(P_{90}\)) lead to the largest uncertainties in terms of detection of the \(\hbox {CH}_2\hbox {O}\) boundary location. This observation is consistent with the JPDF distribution, in which high intensities are correlated with low gradients. Near \(I_\mathrm{cont}\)(\(P_{20}\)) and \(I_\mathrm{cont}\)(\(P_{30}\)), the boundary shows little sensitivity to the percentile value chosen. This is because these intensities correlate well with the global gradient maximum, which is in accordance with the JPDF analysis. Fig. 5(c) shows additionally that the boundary determined by \(P_{20}\) within the probe volume appear as connected, and flame structures of various scales are well represented. As a result of this sensitivity study, the \(P_{20}\) percentile is chosen as the threshold value for surface detection in this work. Since no fitting is required, the percentile calculation is much faster than direct computing of global gradient maximum from JPDFs but still provides a reasonable approximation.

Cross-section of a single-shot \(\hbox {CH}_2\hbox {O}\)-LIF signal reconstruction shown as a gradient map with gradient iso-lines of percentiles P. b JPDF of intensity and gradient. c The corresponding intensity map with intensity iso-lines \(I_\mathrm{cont}\) corresponding to gradient percentiles
Figure 6a shows a single-shot 3D surface which corresponds to the \(\hbox {CH}_2\hbox {O}\) structure in Fig. 4. Because the gradient value of \(P_{20}\) percentile is estimated for each single-shot \(\hbox {CH}_2\hbox {O}\)-LIF matrix, the intensity threshold for edge detection is automatically adapted to the signal level of each \(\hbox {CH}_2\hbox {O}\) structure. Due to the gradient-based character, this algorithm provides a reliable detection of the \(\hbox {CH}_2\hbox {O}\) surface that is not sensitive to intensity fluctuations and background noise.
The detected flame surface is shown along with the raw \(\hbox {CH}_2\hbox {O}\)-LIF signal in Fig. 6b for a 2D slice that is extracted from the 3D reconstruction. Due to the fact that the surface wrinkling on both sides of the \(\hbox {CH}_2\hbox {O}\) region are different, the \(\hbox {CH}_2\hbox {O}\) boundary was separated into an inner and outer surface. Figure 6b shows inserted break points that correspond to the lowest axial position on each side of the flame base. In the following, a separate structural analysis is performed on the inner and outer surfaces.
3.3 Local surface topology
The local surface topology is investigated by evaluating the \(\hbox {CH}_2\hbox {O}\)-LIF iso-surfaces that are detected using the adaptive thresholding method discussed in Sect. 3.2. The vector n normal to an iso-surface is defined as
where the normal vector points towards regions of higher intensity. By computing the three invariants (\(I_{1}\), \(I_{2}\) and \(I_{3}\)) of the curvature tensor, the principal curvatures, \(\kappa _1\) and \(\kappa _2\), can be obtained as the two eigenvalues of the characteristic equation (Han et al. 2019)
The principal curvatures, \(\kappa _1\) and \(\kappa _2\), are the numerically maximum and minimum curvatures, such that \(\kappa _1 > \kappa _2\). The Gaussian curvature \(\kappa _g\) and the mean curvature, \(\kappa _m\), can be computed as
As schematically shown in Fig. 7, the local surface geometries of \(\hbox {CH}_2\hbox {O}\) surfaces can be described by evaluating the \(\kappa _m - \kappa _g\) JPDF. The structure topology can be classified as elliptic (\(\kappa _g > 0\)), cylindrical (\(\kappa _g = 0\)) or saddle (\(\kappa _g < 0\)) shape. According to the positive and negative value of \(\kappa _m\), the shape is further classified as convex (\(\kappa _m > 0\)) or concave (\(\kappa _m < 0\)) toward regions of higher \(\hbox {CH}_2\hbox {O}\)-LIF signal. The region \(\kappa _g > \kappa _m^2\) implies non-physical complex curvatures. To minimize the artifacts caused by the pixel discretization, the raw volumetric \(\hbox {CH}_2\hbox {O}\) scalar fields \(V_\mathrm{raw}\) were further processed with local Gaussian smoothing with filter size of 5 voxels. To eliminate the boundary effect on the curvature statistics, points near the edge of the detection volume were excluded from this analysis.

a Single-shot surface detection of \(\hbox {CH}_2\hbox {O}\) structure in Fig. 4, which is evaluated with adaptive boundary detection based on a gradient percentile \(P_{20}\). b 2D slice of single-shot \(\hbox {CH}_2\hbox {O}\)-LIF signal with the determined boundaries. The boundary is separated into the inner and outer layer surface by inserting break points (red dots)

Classification of local \(\hbox {CH}_2\hbox {O}\) surface shapes within the \(\kappa _m - \kappa _g\) diagram. Reprinted from (Han et al. 2019) with permission
4 Turbulent flame topology
In this section, 3D spatially resolved data are used to investigate the topography of the lower part of the lifted jet flame including the flame base. Curvatures calculated using 2D and 3D data are compared and flame structures are characterized by surface curvature statistics. Finally, a time-resolved \(\hbox {CH}_2\hbox {O}\) 3D reconstruction is shown to demonstrate the temporal evolution of the lifted flame.
4.1 \(\hbox {CH}_2\hbox {O}\) surface curvatures
The three-dimensional \(\hbox {CH}_2\hbox {O}\) structures are investigated by evaluating curvatures of \(\hbox {CH}_2\hbox {O}\) iso-surfaces, as described in Sect. 3.3. Although this method is employable for 2D and 3D surfaces, in 2D case \(\kappa _1\) and \(\kappa _2\) are equal to \(\kappa _m\). Since the 2D curvature has been widely used to examine flame wrinkling in previous studies, it is of interest to compare the mean curvature as obtained from 2D and 3D data. In Fig. 8, the probability density function (PDF) of the two-dimensionally computed \(\kappa _m\) is compared with that of the three-dimensional mean curvature \(\kappa _m\). The curvatures are computed on the center plane (z = \({0}\hbox { mm}\)) of the detection volume. These PDFs are evaluated based on 2430 individual reconstructed \(\hbox {CH}_2\hbox {O}\) structures and the same data are used for all the following analysis. In general, the PDFs reveal similar trends for 2D and 3D curvatures with peak values near 0 \(\hbox {mm}^{-1}\). However, narrower PDFs for the 2D curvatures indicate that the lack of out-of-plane information leads to significant underestimation of the full 3D curvature. The 3D curvatures provide a more complete measure of the flame topology and are used in the following analysis.

The PDF distributions of mean curvature \(\kappa _m\) (in \(\hbox {mm}^{-1}\)) calculated from two-dimensional and three-dimensional data for a inner and b outer \(\hbox {CH}_2\hbox {O}\) surfaces. PDF bins = \({0.25}\,{\hbox {mm}^{-1}}\)
As discussed in Sect. 3, the inner \(\hbox {CH}_2\hbox {O}\) surface is curved differently than the outer surface. In Fig. 9, the PDFs of 3D mean curvature \(\kappa _m\) for the inner and outer surfaces are compared. The highest probabilities occur at small curvatures around \({0}\,{\hbox {mm}^{-1}}\) and are slightly shifted to negative values of \(\kappa _m\). The PDFs decrease monotonically towards larger magnitudes of \(\kappa _m\). Figure 9 shows that the outer layer has a narrower distribution and higher probabilities at smaller mean curvatures. The spatial resolution of 3D reconstructions is determined by the z-discretization of laser sheets, which is the main factor in determining the uncertainty of the curvature calculations. Based on the average z-discretization of \({250}\,\upmu \hbox {m}\), the maximum fully resolved curvature is approximately \({4}{\hbox { mm}^{-1}}\). Most of the curvatures in the \(\kappa _m\)-PDFs for the inner and outer surfaces are within this resolution limit and are thus considered to be reliable. Additionally, the curvature of the largest vortical structures \(\kappa _{vor}\) (gray dashed lines) was calculated (gray dashed lines) based on the estimation of the integral length scale of \(\sim {1.75}\hbox { mm}\), resulting in \(\kappa _{vor} \approx 1/(0.5 \times 1.75) \approx {1.14}{\hbox { mm}^{-1}}\). Both larger and smaller surface curvatures are observed with respect to this length scale. The reduction in curvature from the inner to outer surfaces is attributed to the heat release in the \(\hbox {CH}_2\hbox {O}\) region where a diffusion flame resides. Turbulent eddies that traverse through the \(\hbox {CH}_2\hbox {O}\) region are weakened by dilatation and increasing viscosity, resulting in a less wrinkled \(\hbox {CH}_2\hbox {O}\) outer surface and a narrower curvature PDF distribution. Moreover, the shear layer between the jet and co-flow is probably located closer to the inner surface, which would lead to stronger flame stretch effects.

The PDF distributions of 3D mean curvature \(\kappa _m\) (in \(\hbox {mm}^{-1}\)) for inner and outer \(\hbox {CH}_2\hbox {O}\) surfaces. The gray dashed lines indicate the estimated curvature of largest vortical structures in the flow field. PDF bins = \({0.25}{\hbox { mm}^{-1}}\)
4.2 \(\hbox {CH}_2\hbox {O}\) surface shape analysis
The structure of turbulent flames is of interest for understanding turbulence–flame interactions. For example, the local flame curvature can impact the effects of transport on turbulent non-premixed flames (Han et al. 2019). With the 3D reconstructed CH2O surface, the surface curvature can be analyzed using the \(\kappa _m - \kappa _g\) diagram to determine the distribution of different flame topologies. Figure 10a, b shows the JPDF of \(\kappa _m - \kappa _g\) for the inner and outer surfaces, respectively. The JPDFs for inner and outer surfaces have similar distributions and the convex (\(\kappa _m >0\)) structures have a slightly lower probability compared to the concave (\(\kappa _m <0\)) structures. The distributions are also slightly skewed towards the saddle concave zone in the lower left quadrant, and which is more pronounced for outer surfaces. The saddle structures (\(\kappa _g <0\)) have a higher probability than elliptic structures (\(\kappa _g >0\)). For both surfaces, the highest probabilities were observed in the region of \(\kappa _g \approx 0\), which indicates that the sheet-like (\(\kappa _g \approx 0\) and \(\kappa _m \approx 0\)) and cylinder-like (\(\kappa _g \not \approx 0\) and \(\kappa _m \approx 0\)) structures are preferential in the reaction zone of \(\hbox {CH}_2\hbox {O}\).

The JPDF distribution of \(\kappa _m\) (in \(\hbox {mm}^{-1}\)) and \(\kappa _g\) (in \(\hbox {mm}^{-2}\)) for a inner and b outer \(\hbox {CH}_2\hbox {O}\) surfaces
In addition to the \(\kappa _m - \kappa _g\) method, the shape can be investigated using principal curvatures. The two principal curvatures, \(\kappa _1\) and \(\kappa _2\), were computed according to Eq. 5, and their JPDFs are plotted in Fig. 11. Because \(\kappa _1 > \kappa _2\), all of the sample points are below the diagonal \(\kappa _1 = \kappa _2\). In the \(\kappa _1 - \kappa _2\) JPDF, similar to the \(\kappa _m - \kappa _g\) space, the following characteristic zones are identified by the circled numbers in Fig. 11: (1) elliptic convex , (2) saddle convex, (3) saddle concave and (4) elliptic concave. The cylindrical structures can be identified along the axis of \(\kappa _1 = 0\) and the axis of \(\kappa _2 = 0\). The \(\kappa _1 - \kappa _2\) diagram reveals similar trends to the \(\kappa _m - \kappa _g\) regime. The saddle and cylindrical structures are dominant. Furthermore, the points on the outer surface are more confined within the range of small curvatures compared to those on the inner surface. The decrease of surface wrinkling is probably attributable to the turbulence degradation through the \(\hbox {CH}_2\hbox {O}\) region due to the temperature increase.

The JPDF distribution of principal curvatures \(\kappa _1\) (in \(\hbox {mm}^{-1}\)) and \(\kappa _2\) (in \(\hbox {mm}^{-1}\)) for a inner and b outer \(\hbox {CH}_2\hbox {O}\) surfaces
The characteristic shapes of three-dimensional \(\hbox {CH}_2\hbox {O}\) surfaces were further determined by the dimensionless shape factor sf, which is defined as the ratio between the principal curvatures \(\kappa _1\) and \(\kappa _2\):
and
Here, shape factor values sf are restricted to the range of \([-1, 1]\). The positive (or negative) sign of the shape factor indicates an elliptic (or saddle) surface and \(sf = 0\) signifies a cylindrical surface. In particular, sf = 1 indicates a spherical surface shape. As shown in Fig. 12, the shape factor PDFs peak at \(sf \approx 0\) and no obvious preferential value other than \(sf = 0\) is observed. The distributions from the inner and outer surfaces show essentially the same trends in which the probabilities of the saddle and cylindrical shapes on the surface are markedly higher than that of elliptic surfaces. This conclusion is consistent with the observation in the \(\kappa _m - \kappa _g\) distributions. The sf PDFs for the inner and outer surfaces nearly overlap, indicating that the shape factor remains self-similar in these regions, despite the differences in distributions of the principal curvatures shown in Fig. 11.
Comparing the results of the \(\kappa _m - \kappa _g\) and sf PDFs, similar conclusions can be made on the \(\hbox {CH}_2\hbox {O}\) surface shape characteristics. While the sf PDFs reveal the probabilities of saddle, cylindrical and elliptic shapes, \(\kappa _m - \kappa _g\) indicates additionally the curvature direction with respect to the direction of scalar gradients. This makes the \(\kappa _m - \kappa _g\) analysis preferred for future studies.

The PDF of shape factors sf evaluated for inner and outer \(\hbox {CH}_2\hbox {O}\) surfaces
4.3 Time-resolved volumetric flame topology
The 3D reconstruction of \(\hbox {CH}_2\hbox {O}\)-LIF images acquired from a reconstructed 5 ms burst of laser pulses provided approximately 50 consecutive instances of 3D \(\hbox {CH}_2\hbox {O}\) structures. Figure 13 shows a sequence of nine consecutive \(\hbox {CH}_2\hbox {O}\)-LIF measurements acquired at \({10}\hbox { kHz}\), illustrating the temporal and spatial evolution of the turbulent lifted flame near its base. The occurrence of an isolated \(\hbox {CH}_2\hbox {O}\) pocket is recorded starting from \(\hbox {t}_0 + {200}\, \upmu \hbox {s}\). This pocket grows and propagates until it merges with the main branch at \(\hbox {t}_0 + {600}\, \upmu \hbox {s}\). This observation could suggest the occurrence of a local autoignition event or simply the interaction with other regions of \(\hbox {CH}_2\hbox {O}\) due to out-of-plane motion. Auto-ignition in the current flame could be expected if the turbulent perturbation of the temperature field and transport of radicals to upstream locations favorably facilitates the low-temperature chemistry (Minamoto and Chen 2016) of the DME mixture. An auto-ignition event was observed in similar turbulent lifted DME flames in a hot co-flow (Macfarlane et al. 2018). Generally, high-speed 3D imaging has the advantage of resolving ambiguities of out-of-plane motion that arise in high-speed 2D imaging. However, the isolated \(\hbox {CH}_2\hbox {O}\) pocket observed at \(\hbox {t}_0 + {200}\, \upmu \hbox {s}\) is on the edge of the probe volume and therefore the effect of out-of-plane movement cannot be excluded due to the finite depth of the current 3D \(\hbox {CH}_2\hbox {O}\) measurements.

Time sequence of 3D \(\hbox {CH}_2\hbox {O}\)-LIF signal reconstructions. The observation of an isolated pocket originated from \(\hbox {t}_0+{200}\, \upmu \hbox {s}\) is pointed out
5 Conclusions
We have demonstrated a new capability for high-speed 3D \(\hbox {CH}_2\hbox {O}\) LIF measurements in a partially premixed lifted turbulent DME/air jet flame using an AOD scanning system combined with a \({100}\hbox { kHz}\) pulse-burst laser. The stable and precise laser deflection in combination with a relatively simple optical setup enables reliable 3D reconstruction from the parallel laser sheet illumination with high accuracy and precision. Consequently, a \({10}\hbox { kHz}\) volumetric imaging system of \(\hbox {CH}_2\hbox {O}\)-LIF was successfully demonstrated with a detection volume of \(17.3 \times 11.9 \times {2.3}\hbox { mm}^3\) and a signal-to-noise ratio of up to 15. The average in-plane and out-of-plane spatial resolution was \({175}\,\upmu \hbox {m}\) and \({250}\,\upmu \hbox {m}\), respectively, which exceeded the spatial resolution for state-of-the-art volumetric illumination-based 3D imaging techniques.
The 3D measurements were used to investigate the structural topology of \(\hbox {CH}_2\hbox {O}\) iso-surfaces. For this purpose, reliable 3D flame surface detection was achieved using adaptive intensity thresholding based on a gradient percentile method. Furthermore, systematic analysis of the Gaussian curvature \(\kappa _g\) and mean curvature \(\kappa _m\) was performed for both the inner and outer \(\hbox {CH}_2\hbox {O}\) surfaces. The statistical analysis revealed that the saddle and cylindrical structures are dominant and curvatures on the outer surfaces have a narrower distribution than those on the inner surface, which is attributed to weakening turbulence eddies as a result of the heat release. The analysis of the principal curvatures \(\kappa _1 - \kappa _2\) JPDF and shape factor further confirmed that the surface morphology has a greater probability of having a saddle shape than an elliptic shape. The topology statistics on the inner and outer flame surfaces showed self-similarity despite differences in the widths of the curvature distributions. To demonstrate the capability of high-speed 3D \(\hbox {CH}_2\hbox {O}\)-LIF measurements, the large-scale movement and deformation of the flame structures was tracked in space and time. In summary, the present results demonstrated a technique for reliable 4D scalar visualization in a turbulent reacting flow. The coupling of this technique with recent advances in 4D velocimetry techniques will provide unique possibilities for a deepened understanding of complex turbulence–chemistry interactions in turbulent reacting flows.
References
Baum E, Peterson B, Surmann C, Michaelis D, Böhm B, Dreizler A (2013) Investigation of the 3D flow field in an IC engine using tomographic PIV. Proc Combust Inst 34(2):2903–2910. https://doi.org/10.1016/j.proci.2012.06.123
Bode J, Schorr J, Krüger C, Dreizler A, Böhm B (2017) Influence of three-dimensional in-cylinder flows on cycle-to-cycle variations in a fired stratified DISI engine measured by time-resolved dual-plane PIV. Proc Combust Inst 36(3):3477–3485. https://doi.org/10.1016/j.proci.2016.07.106
Bode J, Schorr J, Krüger C, Dreizler A, Böhm B (2019) Influence of the in-cylinder flow on cycle-to-cycle variations in lean combustion DISI engines measured by high-speed scanning-PIV. Proc Combust Inst 37(4):4929–4936. https://doi.org/10.1016/j.proci.2018.07.021
Boxx I, Heeger C, Gordon R, Böhm B, Aigner M, Dreizler A, Meier W (2009) Simultaneous three-component PIV/OH-PLIF measurements of a turbulent lifted, C3H8-Argon jet diffusion flame at 1.5 kHz repetition rate. Proc Combust Inst 32(1):905–912. https://doi.org/10.1016/j.proci.2008.06.023
Buckmaster J (2002) Edge-flames. Prog Energy Combust Sci 28(5):435–475. https://doi.org/10.1016/S0360-1285(02)00008-4
Canny J (1986) A computational approach to edge detection. IEEE Trans Pattern Anal Mach Intell PAMI 8(6):679–698. https://doi.org/10.1109/TPAMI.1986.4767851
Coriton B, Steinberg AM, Frank JH (2014) High-speed tomographic PIV and OH PLIF measurements in turbulent reactive flows. Exp Fluids 55(6):261. https://doi.org/10.1007/s00348-014-1743-3
Frank JH, Lyons KM, Long MB (1991) Technique for three-dimensional measurements of the time development of turbulent flames. Opt Lett 16(12):958–960. https://doi.org/10.1364/OL.16.000958
Gabet KN, Shen H, Patton RA, Fuest F, Sutton JA (2013) A comparison of turbulent dimethyl ether and methane non-premixed flame structure. Proc Combust Inst 34(1):1447–1454. https://doi.org/10.1016/j.proci.2012.06.183
Gautam T (1984) Lift-off heights and visible lengths of vertical turbulent jet diffusion flames in still air. Combust Sci Technol 41(1–2):17–29. https://doi.org/10.1080/00102208408923819
Gordon RL, Boxx I, Carter C, Dreizler A, Meier W (2012) Lifted diffusion flame stabilisation: conditional analysis of multi-parameter high-repetition rate diagnostics at the flame base. Flow Turbul Combust 88(4):503–527. https://doi.org/10.1007/s10494-011-9365-9
Halls BR, Thul DJ, Michaelis D, Roy S, Meyer TR, Gord JR (2016) Single-shot, volumetrically illuminated, three-dimensional, tomographic laser-induced-fluorescence imaging in a gaseous free jet. Opt Express 24(9):10040–10049. https://doi.org/10.1364/OE.24.010040
Halls BR, Gord JR, Meyer TR, Thul DJ, Slipchenko M, Roy S (2017a) 20-kHz-rate three-dimensional tomographic imaging of the concentration field in a turbulent jet. Proc Combust Inst 36(3):4611–4618. https://doi.org/10.1016/j.proci.2016.07.007
Halls BR, Hsu PS, Jiang N, Legge ES, Felver JJ, Slipchenko MN, Roy S, Meyer TR, Gord JR (2017b) kHz-rate four-dimensional fluorescence tomography using an ultraviolet-tunable narrowband burst-mode optical parametric oscillator. Optica 4(8):897. https://doi.org/10.1364/OPTICA.4.000897
Han W, Scholtissek A, Dietzsch F, Jahanbakhshi R, Hasse C (2019) Influence of flow topology and scalar structure on flame-tangential diffusion in turbulent non-premixed combustion. Combust Flame 206:21–36. https://doi.org/10.1016/j.combustflame.2019.04.038
Karami S, Hawkes ER, Talei M, Chen JH (2016) Edge flame structure in a turbulent lifted flame: a direct numerical simulation study. Combust Flame 169:110–128. https://doi.org/10.1016/j.combustflame.2016.03.006
Kioni PN, Rogg B, Bray K, Liñán A (1993) Flame spread in laminar mixing layers: the triple flame. Combust Flame 95(3):276–290. https://doi.org/10.1016/0010-2180(93)90132-M
Kychakoff G, Paul PH, van Cruyningen I, Hanson RK (1987) Movies and 3-D images of flowfields using planar laser-induced fluorescence. Appl Opt 26(13):2498–2500. https://doi.org/10.1364/AO.26.002498
Lawn CJ (2009) Lifted flames on fuel jets in co-flowing air. Prog Energy Combust Sci 35(1):1–30. https://doi.org/10.1016/j.pecs.2008.06.003
Li T, Pareja J, Becker L, Heddrich W, Dreizler A, Böhm B (2017) Quasi-4D laser diagnostics using an acousto-optic deflector scanning system. Appl Phys B 123(3):1243. https://doi.org/10.1007/s00340-017-6663-5
Li T, Pareja J, Fuest F, Schütte M, Zhou Y, Dreizler A, Böhm B (2018) Tomographic imaging of OH laser-induced fluorescence in laminar and turbulent jet flames. Meas Sci Technol 29(1):15206. https://doi.org/10.1088/1361-6501/aa938a
Lyons KM (2007) Toward an understanding of the stabilization mechanisms of lifted turbulent jet flames: experiments. Progr Energy Combust Sci 33(2):211–231. https://doi.org/10.1016/j.pecs.2006.11.001
Ma L, Lei Q, Capil T, Hammack SD, Carter CD (2017a) Direct comparison of two-dimensional and three-dimensional laser-induced fluorescence measurements on highly turbulent flames. Opt Lett 42(2):267–270. https://doi.org/10.1364/OL.42.000267
Ma L, Lei Q, Ikeda J, Xu W, Wu Y, Carter CD (2017b) Single-shot 3D flame diagnostic based on volumetric laser induced fluorescence (VLIF). Proc Combust Inst 36(3):4575–4583. https://doi.org/10.1016/j.proci.2016.07.050
Macfarlane AR, Dunn M, Juddoo M, Masri A (2018) The evolution of autoignition kernels in turbulent flames of dimethyl ether. Combust Flame 197:182–196. https://doi.org/10.1016/j.combustflame.2018.07.022
Miller VA, Troutman VA, Hanson RK (2014) Near-kHz 3D tracer-based LIF imaging of a co-flow jet using toluene. Meas Sci Technol 25(7):75403. https://doi.org/10.1088/0957-0233/25/7/075403
Minamoto Y, Chen JH (2016) DNS of a turbulent lifted DME jet flame. Combust Flame 169:38–50. https://doi.org/10.1016/j.combustflame.2016.04.007
Olofsson J, Richter M, Aldén M, Augé M (2006) Development of high temporally and spatially (three-dimensional) resolved formaldehyde measurements in combustion environments. Rev Sci Instrum 77(1):13104. https://doi.org/10.1063/1.2165569
Pareja J, Johchi A, Li T, Dreizler A, Böhm B (2019) A study of the spatial and temporal evolution of auto-ignition kernels using time-resolved tomographic OH-LIF. Proc Combust Inst 37(2):1321–1328. https://doi.org/10.1016/j.proci.2018.06.028
Patrie BJ (1994) Instantaneous three-dimensional flow visualization by rapid acquisition of multiple planar flow images. Opt Eng 33(3):975. https://doi.org/10.1117/12.160888
Peters N (2000) Turbulent combustion. Cambridge monographs on mechanics. Cambridge University Press, Cambridge. https://doi.org/10.1017/CBO9780511612701
Peterson B, Baum E, Böhm B, Dreizler A (2015) Early flame propagation in a spark-ignition engine measured with quasi 4D-diagnostics. Proc Combust Inst 35(3):3829–3837. https://doi.org/10.1016/j.proci.2014.05.131
Peterson B, Baum E, Ding CP, Michaelis D, Dreizler A, Böhm B (2017) Assessment and application of tomographic PIV for the spray-induced flow in an IC engine. Proc Combust Inst 36(3):3467–3475. https://doi.org/10.1016/j.proci.2016.06.114
Römer G, Bechtold P (2014) Electro-optic and acousto-optic laser beam scanners. Phys Procedia 56:29–39. https://doi.org/10.1016/j.phpro.2014.08.092
Shimura M, Ueda T, Choi GM, Tanahashi M, Miyauchi T (2011) Simultaneous dual-plane CH PLIF, single-plane OH PLIF and dual-plane stereoscopic PIV measurements in methane-air turbulent premixed flames. Proc Combust Inst 33(1):775–782. https://doi.org/10.1016/j.proci.2010.05.026
Trunk PJ, Boxx I, Heeger C, Meier W, Böhm B, Dreizler A (2013) Premixed flame propagation in turbulent flow by means of stereoscopic PIV and dual-plane OH-PLIF at sustained kHz repetition rates. Proc Combust Inst 34(2):3565–3572. https://doi.org/10.1016/j.proci.2012.06.025
Weinkauff J, Greifenstein M, Dreizler A, Böhm B (2015) Time resolved three-dimensional flamebase imaging of a lifted jet flame by laser scanning. Meas Sci Technol 26(10):105201. https://doi.org/10.1088/0957-0233/26/10/105201
Wellander R, Richter M, Aldén M (2011) Time resolved, 3D imaging (4D) of two phase flow at a repetition rate of 1 kHz. Opt Express 19(22):21508–21514. https://doi.org/10.1364/OE.19.021508
Wellander R, Richter M, Aldén M (2014) Time-resolved (kHz) 3D imaging of OH PLIF in a flame. Exp Fluids 55(6):579. https://doi.org/10.1007/s00348-014-1764-y
Wu Y, Xu W, Lei Q, Ma L (2015) Single-shot volumetric laser induced fluorescence (VLIF) measurements in turbulent flows seeded with iodine. Opt Express 23(26):33408–33418. https://doi.org/10.1364/OE.23.033408
Yip B, Schmitt RL, Long MB (1988) Instantaneous three-dimensional concentration measurements in turbulent jets and flames. Opt Lett 13(2):96. https://doi.org/10.1364/OL.13.000096
Zhou B, Frank JH (2019) Effects of heat release and imposed bulk strain on alignment of strain rate eigenvectors in turbulent premixed flames. Combust Flame 201:290–300. https://doi.org/10.1016/j.combustflame.2018.12.016
Acknowledgements
The authors thank the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation)—Projektnummer 215035359— TRR 129 for its support through CRC/Transregio 129 “Oxy-flame: development of methods and models to describe solid fuel reactions within an oxy-fuel atmosphere.” A. Dreizler is grateful for support by the Gottfried Wilhelm Leibniz Program of the Deutsche Forschungsgemeinschaft. The support of the U.S. Department of Energy, Office of Basic Energy Sciences, Division of Chemical Sciences, Geosciences, and Biosciences is gratefully acknowledged. Sandia National Laboratories is a multimission laboratory managed and operated by National Technology and Engineering Solutions of Sandia, LLC., a wholly owned subsidiary of Honeywell International, Inc., for the U.S. Department of Energy’s National Nuclear Security Administration under contract DE-NA-0003525. The views expressed in this article do not necessarily represent the views of the U.S. Department of Energy or the United States Government.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Li, T., Zhou, B., Frank, J.H. et al. High-speed volumetric imaging of formaldehyde in a lifted turbulent jet flame using an acousto-optic deflector. Exp Fluids 61, 112 (2020). https://doi.org/10.1007/s00348-020-2915-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-020-2915-y