
Abstract
This paper implements a recently developed technique to conditionally analyze the liquid vs gaseous phase velocity vectors in a high-pressure, liquid-fueled, swirl-stabilized combustor. The technique consists of joint analysis of high repetition rate stereoscopic particle image velocimetry (s-PIV) and fuel planar laser-induced fluorescence (fuel PLIF). The s-PIV measurement is conducted simultaneously on the gas and liquid phases by seeding the gas with titanium dioxide flow tracers. The liquid fuel spray serves as its own flow tracer. A fuel PLIF measurement is used to distinguish the vectors that represent liquid fuel velocities from the vectors that represent gas-phase velocities. This technique provides two useful capabilities to the combustion diagnostics community. First, it enables the removal of bias error that the larger, high Stokes number fuel droplets can introduce to the gas-phase velocity measurements due to gas–liquid slip. Second, it enables the simultaneous study of gas- and liquid-phase velocity fields where there may be liquid–gas slip. In the present study, the results show that the liquid fuel spray is a reasonable flow tracer for the time-averaged flow. However, this study does identify regions in the time-averaged flow that contain sufficiently high accelerations and sufficiently large droplets to introduce liquid–gas slip.
Graphic abstract

Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Gas turbine engines are a dominant power source for aircraft and electric power generation. The design of cutting edge gas turbine engines for flexible operability, high efficiency, and clean emissions is largely governed by the fluid dynamics of the combustion system. Such cutting edge designs require substantial experimental testing to verify the design and validate simulation tools. However, experimental testing of practical combustion systems is challenging due to their complicated inhomogeneous flow fields, which include high temperatures, high pressures, a harsh chemically reacting environment, and in many cases multi-phase flows (Lieuwen 2012; Lefebvre 2010). The advent of high repetition rate lasers and imaging equipment has enabled advanced diagnostic techniques that respond to many of these challenges (Halls et al. 2017; Meyer et al. 2016; Miller et al. 2014; Roy et al. 2015). However, these inhomogeneous combustor flow fields still present some challenges for these advanced techniques.
One of the most popular recent diagnostic techniques is particle image velocimetry (PIV). PIV enables researchers to non-intrusively measure velocity fields with reasonable spatiotemporal resolution (Upatnieks et al. 2002; Steinberg et al. 2008; Westerweel et al. 2013; Sick 2013). A significant body of the literature has been published for high-pressure, liquid-fueled, reacting PIV (Chong and Hochgreb 2013, 2014; Schroll et al. 2013; Meier et al. 2015; Slabaugh et al. 2015, 2016). The working principle of PIV is to seed the flow with tracer particles, to capture images of these particles at known time intervals, and then to measure the displacement of these particles between pairs of images. However, in liquid-fueled systems, liquid fuel droplets can efficiently scatter the laser light. Therefore, the liquid droplets are detected by the imaging system, and they participate in the velocity vector field calculation. Smaller fuel droplets may serve as high-fidelity tracer particles. However, larger liquid droplets (with high Stokes numbers) will be poor flow tracers, since there will be gas-droplet slip in regions of high acceleration (Slabaugh et al. 2015). Therefore, there may be regions in space and time where the gas and liquid have different velocities. This introduces a source of uncertainty into the PIV measurement.
This paper introduces a newly developed method to condition PIV-based velocity vectors on material phase (gas vs liquid) from a synchronized high repetition rate planar laser-induced fluorescence measurement of the liquid fuel (Ritchie and Seitzman 2001; Shani et al. 2003; Chterev et al. 2017). This technique is demonstrated on a high-pressure, liquid-fueled combustor data set to contribute two types of insight. First, this paper assesses the degree of uncertainty that liquid sprays can introduce to velocity field measurements in practical combustors. Second, it demonstrates the additional physical insight into fuel delivery that can be extracted from separate analysis of gas-phase and liquid-phase velocity fields.
2 Experimental setup
This paper demonstrates a new method on a preexisting data set. The data set was measured in the authors’ combustion test facility at Georgia Tech in a partnership with researchers from Spectral Energies. The test facility consists of a high-pressure liquid-fueled swirl-stabilized combustor rig. Details of the measurement campaign and the test facility are provided in Chterev et al. (2017), so only a brief summary is provided here. The rig consists of both air and fuel supplies, a swirler, a quartz cylindrical test section, and an exhaust. The combustor is fueled non-axisymmetrically so that one half of the flow is preferentially fueled. This asymmetric fueling occurs because the fuel injector is installed by design in a floating grommet in the air swirler; its position varies as a function of operating point and thermal state of the test article. At this operating point, the fuel injector is located off-center. This will be important in the analysis section of the paper, where we will analyze the liquid spray from the two halves of the flow independently. The rig is instrumented with acoustic pressure sensors, static pressure sensors, and thermocouples. The operating conditions are summarized in Table 1. The fuel, referred to as “C1,” consists of 99.6% iso-paraffins. Compared to Jet-A, it has a lower boiling range, lower density, a higher viscosity, and a lower Cetane number (Colket et al. 2017; Edwards 2017a). Table 1 also includes the air and fuel mass flow rates. The flow was ignited with a sparked hydrogen torch, and the combustor was reacting for these measurements.
Gas chromatograph (GC × GC) data were available for this fuel (Edwards 2017b). The GC × GC data show that the iso-paraffin content is roughly 80% composed of C-12 (hydrocarbons with 12 Carbon atoms), 15% composed of C-16, and the remaining 5% is smeared across other hydrocarbon types and sizes. Therefore, isododecane is the dominant constituent. The LIF characteristics of this mixture are unknown, but it is likely that the lower concentration constituents such as aromatics provide the dominant LIF signal.
The optical system for the PIV measurement is composed of a high-speed Nd:YLF 527 nm laser, two 12 bit Photron SA5 cameras to acquire the stereo PIV data at 5 kHz, and interference filters centered at 528 nm to reject light from combustion and other diagnostics. The cameras were operated with a resolution of 896 × 848 pixels at 70 μm/pixel. The PIV cameras were outfitted with f = 100 mm AT-X M100 Tokina lenses at f/D = 11.
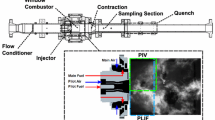
The optical system for the fuel PLIF measurement consisted of a pulsed Nd:YAG-pumped, frequency-doubled dye laser to excite the fuel and the OH species, and two 12-bit intensified cameras to collect the PLIF data. The OH PLIF is not treated in this paper. Figure 1 gives an overview of the optical system setup.

Reproduced from Chterev et al. (2017)
Optical system setup.
The fuel PLIF excitation laser was tuned to 282.93 nm to excite the Q1(6) line of the OH and to simultaneously excite the fuel. The hydrocarbon fuel mixture provided broad LIF absorption and emission spectra. The authors are not aware of a literature on the LIF characteristics of this mixture, so trial-and-error measurements with different excitation and collection wavelengths were performed to confirm the broad spectrum and its overlap with the OH Q1(6) line. The imaging system was operated at 5 kHz with 512 × 720 pixel resolution at 117 μm/pixel. A fuel LIF collection wavelength range of 305–700 nm was selected. The filtering was accomplished with a long-pass Schott WG-305 filter to achieve the lower wavelength cutoff, and a multialkali (S20) photocathode intensifier to provide the upper wavelength cutoff. The LIF signal collected over this broad wavelength range was sufficient to overwhelm the OH LIF and other noise sources. This is discussed more in Sect. 3.3. A short duration 40 ns intensifier gate was used to minimize the collection of chemiluminescence from combustion. Contamination from chemiluminescence was not an issue as confirmed by the absence of signal without laser excitation.
Titanium dioxide (TiO2) particles were the chosen PIV seeding material due to their resistance to burning in the combustor. The choice of the seed particle size is based on the comparison of the flow time scale with the particle response time scale, respectively \( \tau_{\text{f}} \) and \( \tau_{\text{p}} \) (Raffel et al. 2007; Picano et al. 2011; Melling 1997). The Stokes number defined by Eq. (1) can be used to quantify the degree to which particles follow the gaseous flow.
A common formula for the particle response is the one derived from Stokes’ drag coefficient:
with \( \rho_{\text{p}} \) and \( d_{\text{p}} \), respectively, the density and the diameter of the seed particles, and \( \mu_{\text{g}} \) the air dynamic viscosity. The formula for \( \tau_{\text{f}} \) is defined as the ratio of a characteristic length scale \( D \) (swirler diameter) over the maximum of the velocity fluctuation \( \hbox{max} \left( {\tilde{u}_{\text{RMS}} } \right) \) as \( \tau_{\text{f}} \, = \,D/\hbox{max} \left( {\tilde{u}_{\text{RMS}} } \right) \). We used 0.5–1 μm TiO2 particles and obtained \( {\text{Stk}} \approx 0.01 \) in the worst case which means that the seed particles are good tracers.
3 Methodology
To filter and separate the liquid fuel droplet velocities from the seed particle (i.e., gaseous) velocity vectors, the authors used the following steps:
Perform the PIV calculation on the preprocessed unfiltered PIV frames
Compute fuel PLIF histogram to identify fuel signal threshold
Identify and store spatiotemporal fuel droplet locations
Use these locations to tag velocity vectors as gas or liquid phase
Post-process each phase independently
The rest of this section details each of these steps.
3.1 PIV calculation
The PIV images are processed with LaVision DaVis 8.3. The PIV-processing steps are detailed in Chterev et al. (2017) and outlined here. Dual frames are imaged with 8 µs delay, and a velocity field is calculated every 200 µs. Among the processing steps, several image preprocessing methods have been applied to obtain better results, such as a sliding minimum subtraction to erase any static reflections. Self-calibration is performed with DaVis 8.3. Finally, the velocity field calculation is performed with multiple passes of differently sized interrogation windows. The interrogation windows have a decreasing size from 96 × 96 pixels to 32 × 32 pixels, with a final overlap of 50%. The final vector spacing was 0.86 mm.
3.2 Fuel PLIF preprocessing
Several image corrections are applied to the raw fuel PLIF data before processing: (1) a dark field subtraction to take into account the no-light offset of the camera, (2) a fixed pattern noise correction for the spatial variation of the intensity response, (3) a laser intensity correction to adjust the spatial variation of the laser intensity across the PLIF laser sheet, (4) image synchronization and calibration on DaVis 8.3.
3.3 Fuel threshold determination
This analysis depends critically on the capability to isolate the liquid fuel droplet contribution to the PLIF signal from the contributions of fuel vapor, sub-pixel fuel mist, OH, and background noise. The rejection of OH LIF was unnecessary despite the fact that the broad fuel LIF spectrum overlaps the OH LIF spectrum. This is because the fuel LIF was collected in a wavelength range from 305 to 700 nm. The broadband liquid fuel LIF signal is orders of magnitude greater than the narrowband OH LIF signal when integrated over this wide range of wavelengths. The appropriate collection wavelength range that would allow fuel LIF to overwhelm OH LIF was determined by trial-and-error due to lack of availability of LIF data for this fuel. To confirm the absence of OH signal, the measurement was repeated with the addition of a 315/15 nm band-pass filter to narrow the range of collected wavelengths to the OH emission spectrum. This was done with the same lens aperture and intensifier settings as the real measurement and produced no detectable signal. It is noteworthy that the OH LIF rejection could easily be accomplished when the OH signal is not of interest by tuning the laser off of the OH lines.
A thresholding approach was used to selectively identify the regions of liquid fuel PLIF versus background noise, sub-pixel sized droplets, and fuel vapor PLIF. A methodology to make this distinction has already been developed and demonstrated on this data set (Chterev et al. 2017), and it is summarized here. A fuel PLIF cutoff threshold was defined from a histogram of the LIF intensity. The histogram was computed for the full data set by interrogating exclusively the zone close to the fuel entrance to the combustion chamber. Similar histograms were also constructed from instantaneous images. Examination of many of these instantaneous histograms revealed similar qualitative features as the aggregate histogram from the full data record. This is important, because it indicates that temporal dynamics (either from the physics or from the measurement process) are not responsible for the “macroscopic” features in the intensity histogram. Therefore, the aggregate histogram was used for threshold selection.
Figure 2a presents fuel PLIF intensity histogram, and Fig. 2b presents the derivative of the histogram with respect to intensity (to help identify points of inflection in the histogram). Two populations are evident in this histogram. The physical interpretations of these populations are summarized here and are demonstrated in Chterev et al. (2017). The first population with the highest intensities corresponds to fuel signal from droplets large enough to be resolved. These are the liquid droplets of interest to the present study, because they are larger than or on the order of the size of the seeding particles. Therefore, these droplets can potentially slip through the gas-phased material more readily than the seeding particles and can introduce bias error to the PIV measurement.

Fuel PLIF intensity histogram and derivative (fuel signal in green)

Comparison of the time-averaged velocity fields of the a gas phase and b liquid phase. Vectors indicate in-plane velocities and color indicates out-of-plane velocities

Comparison of the time-averaged velocity fields for the a gas phase and b liquid phase. The gas-phase data are discarded from regions where gas-phase data are present less than 10% of the time, and liquid-phase data are discarded from locations where liquid data are present less than 5% of the time. Vectors indicate in-plane velocities and color indicates out-of-plane velocities
The second population corresponds to a weaker signal from noise and very small droplets and vapor. These weaker, sub-pixel-sized droplets are referred to here as a fuel mist. This fuel mist is present everywhere upstream of combustion. These sub-pixel-sized droplets are much smaller than the solid seeding particles and would be excellent flow tracers (although the larger seeding particles have better scattering efficiency and likely dominate the PIV calculations). There would be no liquid–gas slip to report for these fine droplets.
The derivative of the histogram has been computed to get accurate thresholds to define these two populations; the local minima and maxima represent the points of inflection which mark their boundaries. The large fuel droplets region is defined as the region containing fuel PLIF intensities greater than the highest inflection point. It is represented graphically as the green zone in Fig. 2. The threshold that defines this zone was analyzed with an uncertainty analysis. The uncertainty analysis varied this threshold selection by ± 5%. The sensitivity of the liquid velocity measurements to these thresholds is presented with error bars in Fig. 5. The results show that this overall 10% variation in threshold selection does not change the qualitative takeaways of the study.

Radial dependence of the time-averaged velocity fields of the gas and liquid phases, showing a the axial component, b the radial component, and c the azimuthal velocity component. Data are shown from the bottom half (negative y) plane only. Uncertainty bars indicate liquid velocity uncertainty resulting from a ± 5% variation in the fuel threshold
3.4 Phase-separated PIV
The contribution of this work is the phase separation methodology. The phase separation algorithm considers each location in space and time in the fuel PLIF data, and defines liquid-phase regions as those regions with fuel PLIF intensity above threshold, and gas-phase regions as those regions with fuel PLIF intensity below threshold. This information is then used to tag each of the velocity vectors as either gas phase or liquid phase.
4 Results
This section presents results from the phase separation approach presented in Sect. 3, applied to the experimental data that are introduced in Sect. 2. The application of this methodology results in two velocity fields: one for the gas phase, and one for the liquid phase (liquid fuel). The presentation of these results is organized into three subsections. The first subsection presents a comparison of the time-averaged gas- and liquid-phase velocity fields. The second subsection compares instantaneous gas- and liquid-phase velocity fields to capture unsteady considerations. The third subsection presents acceleration fields and their impact on droplet size and flow following.
4.1 Time-averaged comparisons
This section presents the results of the phase separation technique in a liquid-fueled, pressurized combustor flow field. Figure 3 shows a comparison of the gas-phase time-averaged velocity field to the liquid-phase time-averaged velocity field. The velocity fields are arranged so that the in-plane velocities are represented by vectors, and the out-of-plane velocities are represented by the color map. The figure highlights the qualitatively similar trajectories of the gas-phase tracer particles and the larger liquid droplets. Additionally, it is important to note the “sparseness” of the liquid data. This is due to the fact that there are regions of the combustor flow field that liquid droplets never visit (due primarily to evaporation and burning). The axial velocity is denoted as Uz, the transverse velocity is denoted as Uy, and the azimuthal velocity is denoted as Uϴ, and their time averages are denoted as Uz,0, Uy,0, and Uϴ,0, respectively.
Figure 4 shows the gas-phase and liquid-phase velocity fields again. However, in this figure, the vector fields have been conditionally masked. The masks are established so that the gas-phase vectors are shown only for locations where there are gas-phase data at least 10% of the time, and liquid-phase vectors are shown only for locations where there are liquid-phase data at least 5% of the time. The purpose of these masks was to prevent poorly converged phase-conditioned velocity statistics in regions with low numbers of data counts. Therefore, all data presented in the rest of this paper will be preprocessed with this mask. With 1000 total velocity field samples, the gas-phase mask requires at least 100 gas-phase samples, while the liquid-phase mask requires only 50 samples. The lower tolerance for the liquid data was necessary due to the spatiotemporal sparsity of liquid, and thus the lesser availability of liquid data. These mask definitions do not affect the quantitative velocity slip analysis, and they only influence the regions where data are shown. The qualitative takeaways of this study are insensitive to these selections. A comparison of Figs. 3 and 4 suggests that the liquid droplets are rarely delivered to the central and outer recirculation zones, since vectors in these regions with reversed axial velocities are only observed in Fig. 3. The results in Fig. 4 also highlight the eccentricity and asymmetry of the fuel injection strategy, which preferentially delivers fuel to a filming surface at the bottom (negative y half plane) of the injector. Therefore, subsequent data will be presented only for the negative y half of the measurement plane which has more liquid samples. This is also the more interesting region for comparison, since the fuel in the lower half plane exhibits a greater degree of liquid–gas slip than that in the upper half plane.
The vector fields shown in Figs. 3 and 4 show good qualitative agreement between the time-averaged velocity fields. To make quantitative comparisons, Fig. 5 overlays the radial dependencies of the three velocity components for the gas and liquid phases. The figure shows some evidence of liquid–gas slip in the axial and radial velocity components, with the greatest velocity differences in the radial velocity. This suggests a greater degree of acceleration in the radial direction than the other directions (this is not surprising in the time-averaged flow due to the high degree of swirl). The figure includes uncertainty bars on the liquid fuel velocities. The uncertainty bars were calculated by varying the fuel PLIF threshold by ± 5%. The results are mostly insensitive to fuel PLIF threshold except near the edge of the liquid-containing region. This is a region of interest, but the general observations and directions of velocity bias hold despite these uncertainties. The qualitative takeaways from this study are unaltered by this overall 10% threshold variation.
The analysis next considers the time-averaged slip velocity between the gas and liquid phases. In this paper, slip velocities are quantified as the gas-phase velocity subtracted from the liquid-phase velocity (e.g., axial slip would be Uz,liq–Uz,gas). This is arranged so that positive values of slip indicate that the liquid is moving faster in the positive direction than the gas (or that it is moving slower in the negative direction than the gas). Since most velocity vectors in the negative y plane have negative transverse components, a radial velocity is defined to avoid the confusion of differences of negative velocities. Therefore, in place of the transverse velocity, the rest of this paper considers the radial velocity in the negative y plane, where Ur = − Uy. Positive radial velocities represent motion away from the flow centerline.
Figure 6 shows fields of slip velocity for each of the three velocity components. The in-plane velocity vectors from the time-averaged gas-phase velocity field are overlaid for reference to help identify the locations of these slip data relative to the time-averaged flow topology. The figure clearly shows that the greatest time-averaged slip is experienced in the radial velocity component in the outer shear layer. The sign of the slip shows that the radial velocity of the liquid droplets is greater than that of the gas. This supports the hypothesis that the larger droplets are “centrifuged” from the swirling flow. In addition, the axial velocity results show that the liquid droplets typically have faster downstream-oriented axial velocities than the gas phase in the outer shear layer. The authors further hypothesize that this is attributable to the centrifuging of droplets, which would transport high axial velocity droplets from the jet core to the outer shear layer, which is a region of lower gas velocities and which is the region where liquid–gas slip is observed.

Fields of slip velocity for the a axial, b radial, and c azimuthal velocity components. Slip velocity is represented by color. The overlaid velocity vectors represent the in-plane time-averaged gas-phase velocities for reference
4.2 Instantaneous comparisons
The previous section compared time-averaged gas and liquid velocity fields. These comparisons help elucidate the bias error that can be introduced into velocity fields by liquid–gas slip. However, the instantaneous velocity fields are potentially subject to greater levels of random uncertainty due to the dynamical accelerations of the unsteady flow. Therefore, this section presents a comparison of the instantaneous liquid and gas velocities.
The method that this study uses fundamentally assumes that gas and liquid do not occupy the same spatiotemporal locations. Therefore, it is not possible to compare the liquid and gas velocities from the exact same positions in space and time. However, it is possible to analyze neighboring gas and liquid velocities. Therefore, this analysis explores temporal neighbors. Temporal neighbors are identified at each spatial location when that location switches from gas phase to liquid phase, and vice versa. The gas and liquid velocities that straddle these “switch points” are compared to assess instantaneous liquid–gas slip. Unlike the time-averaged analysis, these data are not conditioned on spatial locations that had a minimum number of liquid- and/or gas-phased measurements.
Before presenting the liquid vs gas data, Fig. 7 presents the gas-phased velocity data for neighboring temporal samples. These data are sourced from all locations and times when two temporally neighboring samples are both gas-phased. To aid the comparison, each figure includes a one-to-one line. The left column presents the data as scatter plots, which are useful for visualizing the less common events and the overall spread of the data. Each data point in the scatter plot is colored based on its transverse position. The right column presents the data as joint probability distribution functions (pdfs). The pdfs of axial velocity are denoted PUz, and the pdfs of the radial velocity are denoted PUr. The pdfs are useful because they identify where the data are concentrated better than the scatter plots. Together, these plots demonstrate the amount of variation that flow unsteadiness can introduce to the velocity data from one time step to the next. This provides a baseline for the liquid- vs gas-phased comparisons, which are presented next.

Scatter plots (left) and joint probability distributions (right) of instantaneous gas-phased velocity compared to the gas-phased velocity from the same location at the next time step. The figure shows the axial (top) and radial (bottom) velocity components. Colors in the left column indicate transverse position where velocity sample was collected (see Fig. 9)
Figure 8 plots the instantaneous axial and radial liquid-phased velocities against their temporally neighboring gas-phased velocities. Unlike the gas-phased comparisons in Fig. 7, the distributions are clearly biased relative to the one-to-one lines. The figure reinforces the observations from the time-averaged flow fields. First, the instantaneous data show a much greater degree of liquid–gas slip for the radial velocity component than for the axial velocity component. This is evidenced by the high degree of “spread” of the radial velocity data away from the one-to-one line compared to the gas-phased data. Next, the figure shows that the radial liquid-phased velocities tend to be higher than the radial gas-phased velocities. This was attributed to the centrifuging of droplets by the swirling flow field. The figure also shows that although the gas- and liquid-phase velocities are usually closely matched, the axial velocities are preferentially “faster” for the liquid than the gas phase. This bias was also attributed to centrifuging of droplets, which delivers the high-velocity liquid droplets from the jet cores to the outer shear layers where gas velocities are lower.

Scatter plots (left) and joint probability distributions (right) of instantaneous gas and liquid velocities, showing the axial (top) and radial (bottom) velocity components. Colors in the left column indicate transverse position where velocity sample was collected (see Fig. 9)

The instantaneous view provided by Fig. 8 also provides additional physical insight. First, these distributions have less deviation from the one-to-one line than the gas-phased distributions in Fig. 7. This is a surprising result, and is likely because the coherent structures that produce the highest amplitude velocity fluctuations tend to be void of liquid droplets. In other words, the features with the strongest velocity fluctuations are not represented in Fig. 8. Second, in addition to the velocity bias from centrifuged droplets discussed above, the radial velocities still exhibit significant random scatter (significant instantaneous liquid–gas slip). This suggests a greater degree of high-g unsteadiness in the radial direction than the axial direction. The figure also shows a nearly complete absence of liquid droplets with negative axial velocities. This shows that the liquid is destroyed by evaporation and burning before it enters the vortex breakdown bubble and the outer recirculation zones. It further confirms that these recirculation regions consist entirely of gas-phased material, which could not be confidently concluded from the time-averaged velocity fields due to the highly intermittent, flapping nature of these topological features. This is useful knowledge, because the dynamics of these features can be quantified without the risk of bias error from large liquid droplets participating in the PIV algorithm. In other words, any flow field measurements that are conditioned on instantaneous reverse axial velocities would not be subject to uncertainties from liquid–gas slip in this flow.
4.3 Acceleration and droplet size considerations
We calculate a time-averaged (mean) acceleration field from the velocity field using the equations presented below. These equations calculate a mean acceleration field in an Eulerian framework and a cylindrical coordinate system assuming axisymmetry of the mean and a stationary mean.
All these acceleration terms can be calculated from the PIV data. Except for the Coriolis term and the centrifugal term, the calculation of each of these acceleration terms requires finite differencing of the velocity field. This finite differencing produces error due to (a) amplification of noise due to differencing, and (b) bias error due to the substantial length scale over which the differencing is calculated. However, the analysis in the sections above was focused on the impact of centrifugal acceleration. Therefore, Fig. 10a presents the time-averaged field of centrifugal acceleration magnitude.

Fields of a magnitude of centrifugal acceleration, and b maximum droplet size for flow tracing under the centrifugal acceleration field
A Stokes number can be used to estimate the maximum droplet size that can follow the flow under the centrifugal acceleration shown in Fig. 10a. This is accomplished by calculating the relationship between droplet size and Stokes number from the azimuthal velocity, the centrifugal acceleration fields, the density of jet fuel, and the viscosity of hot air. Here, we assume that the droplets primarily exist in regions of un-burned gasses, with a uniform dynamic viscosity of \( \mu_{\text{g}} \, = \,6 \times 10^{ - 5} \) kg/m/s. The droplet density was assumed to be \( \rho_{\text{p}} = 804 \) kg/m3. The Stokes number was defined in terms of a particle response time, \( \tau_{\text{p}} \), and a centrifugal flow time, \( \tau_{\text{f}} \). The Stokes number, \( \tau_{\text{p}} \), and \( \tau_{\text{f}} \) are defined as follows:
The field of cutoff droplet sizes was then calculated for a threshold Stokes number of 1 by equating the particle response time to the centrifugal flow time.
Figure 10b shows the resulting cutoff droplet size field for flow tracing fidelity under the time-averaged centrifugal acceleration. The results show cutoff droplet sizes in the range of 10–30 μm in the swirling jet. Bokhart et al. (2018) published droplet size measurements from a similar injector. They reported mass mean diameters up to 50 μm, which suggests that many droplets larger than 50 μm would be present. The observation that the mean particle size is on the order of the droplet cutoff size supports the hypothesis that the swirling jet centrifuges the larger droplets from the flow.
It is important to note that these cutoff droplet sizes are calculated for the time-averaged velocity field. Swirling jet flow fields like this one are highly unsteady, with both turbulence and coherent structures from low-order flow instabilities. Accurate measurements of these unsteady features would likely require a smaller droplet cutoff size than the one reported here. The potential contribution of these unsteady features to the time-averaged flow field also should not be ignored. Therefore, future work should be conducted to extend this work to the unsteady flow features that are present in swirling, reacting jets.
5 Conclusions
This study applies a previously developed methodology for phase discrimination in PIV measurements of liquid-fueled combustors. The methodology is applied to investigate the impact of liquid–gas slip. The study explores the effects of liquid–gas slip on the time-averaged velocity field, and also explores the instantaneous characteristics of liquid–gas slip. The results show that liquid gas slip is most significant in the outer annular shear layer, where the liquid droplets tend to have greater radial velocities than the gas. In this region, the liquid droplets also have slightly greater axial velocities than the gas. The authors hypothesize that these observations are caused by the radial centrifuging of the large, high-velocity liquid droplets from the jet cores to the outer shear layers. The evidence of this is observed in both the time-averaged and instantaneous velocity fields. An estimation and analysis of the time-averaged centrifugal acceleration field supports this hypothesis. The authors further note from the instantaneous velocity fields that fuel tends to be absent from the spatiotemporal regions with the greatest unsteady velocity amplitudes, and that liquid fuel is almost entirely absent from all recirculation zones (i.e., liquid fuel is rarely located when and where the gas reverses direction). This has implications on the PIV uncertainty from liquid–gas slip in these regions, and provides insight into the liquid fuel delivery for this system.
References
Bokhart A, Shin D, Rodrigues NS, Sojka P, Gore JP, Lucht RP (2018) Spray characteristics of a hybrid airblast pressure-swirl atomizer at near lean blowout conditions using phase Doppler anemometry. In: AIAA SciTech
Chong CT, Hochgreb S (2013) Spray flame study using a model gas turbine swirl burner. Appl Mech Mater 316:17–22
Chong CT, Hochgreb S (2014) Spray flame structure of rapeseed biodiesel and Jet-A1 fuel. Fuel 115:551–558
Chterev I, Rock N, Ek H, Emerson B, Seitzman J, Jiang N, Roy S, Lee T, Gord J, Lieuwen T (2017) Simultaneous imaging of fuel, OH, and three component velocity fields in high pressure, liquid fueled, swirl stabilized flames at 5 kHz. Combust Flame 186:150–165
Colket M, Heyne J, Rumizen M, Gupta M, Edwards T, Roquemore WM, Andac G, Boehm R, Lovett J, Williams R, Condevaux J, Turner D, Rizk N, Tishkoff J, Li C, Moder J, Friend D, Sankaran V (2017) Overview of the national jet fuels combustion program. AIAA J 55(4):1–18
Edwards JT (2017a) Reference jet fuels for combustion testing. In: 55th AIAA aerospace sciences meeting
Edwards JT (2017b) Reference jet fuels for combustion testing. In: AIAA scitech
Halls BR, Jiang N, Meyer TR, Roy S, Slipchenko MN, Gord JR (2017) 4D spatiotemporal evolution of combustion intermediates in turbulent flames using burst-mode volumetric laser-induced fluorescence. Opt Lett 42:2830–2833
Lefebvre AH (2010) Gas turbine combustion: alternative fuels and emissions. CRC Press, Boca Raton
Lieuwen TC (2012) Unsteady combustor physics. Cambridge University Press, New York
Meier U, Heinze J, Magens E, Schroll M, Hassa C, Bake S, Doerr T (2015) Optically accessible multisector combustor: application and challenges of laser techniques at realistic operating conditions. In: ASME Turbo Expo 2015: turbine technical conference and exposition
Melling A (1997) Tracer particles and seeding for particle image velocimetry. Meas Sci Technol 8(12):1406
Meyer TR, Halls BR, Jiang N, Slipchenko MN, Roy S, Gord JR (2016) High-speed, three-dimensional tomographic laser-induced incandescence imaging of soot volume fraction in turbulent flames. Opt Exp 24:29547–29555
Miller JD, Meyer TR, Slipchenko MN, Mance JG, Roy S (2014) Development of a diode-pumped, 100-ms quasi-continuous burst-mode laser for high-speed combustion diagnostics. In: 30th AIAA aerodynamic measurement technology and ground testing conference
Picano F, Battista F, Troiani G, Casciola CM (2011) Dynamics of PIV seeding particles in turbulent premixed flames. Exp Fluids 50(1):75–88
Raffel M, Willert CE, Wereley S, Kompenhans J (2007) Particle image velocimetry: a practical guide. Springer, Berlin
Ritchie BD, Seitzman JM (2001) Quantitative acetone PLIF in two-phase flows. In: 39th aerospace sciences meeting and exhibit
Roy S, Hua J-C, Barnhill W, Gunaratne GH, Gord JR (2015) Deconvolution of reacting-flow dynamics using proper orthogonal and dynamic mode decompositions. Phys Rev E 91(1):013001
Schroll M, Klinner J, Lange L, Willert C (2013) Particle image velocimetry of highly luminescent, pressurized combustion flows of aero engine combustors. In: 10th international symposium on particle image velocimetry
Shani S, Tran T, Genin F, Matlach J, Menon S, Seitzman JM (2003) Characterization of liquid fuel mixing in a scramjet flowfield. In: 12th AIAA international space planes and hypersonic systems and technologies
Sick V (2013) High speed imaging in fundamental and applied combustion research. Proc Combust Inst 34:3509–3530
Slabaugh CD, Pratt AC, Lucht RP (2015) Simultaneous 5 kHz OH-PLIF/PIV for the study of turbulent combustion at engine conditions. Appl Phys B 118:109–130
Slabaugh CD, Boxx I, Werner S, Lucht RP, Meier W (2016) Structure and dynamics of premixed swirl flames at elevated power density. AIAA J 54(3):946–961
Steinberg AM, Driscoll JF, Ceccio SL (2008) Measurements of turbulent premixed flame dynamics using cinema stereoscopic PIV. Exp Fluids 44:985–999
Upatnieks A, Driscoll JF, Ceccio SL (2002) Cinema particle imaging velocimetry time history of the propagation velocity of the base of a lifted turbulent jet flame. Proc Combust Inst 29:1897–1903
Westerweel J, Elsinga GE, Adrian RJ (2013) Particle image velocimetry for complex and turbulent flows. Annu Rev Fluid Mech 45:409–436
Acknowledgements
This research was partially supported by the US Federal Aviation Administration (FAA) Office of Environment and Energy as a part of ASCENT Project 13-C-AJFE-GIT-008 under FAA Award Number: 27a. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the FAA or other ASCENT Sponsors.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Emerson, B., Ozogul, H. Experimental characterization of liquid–gas slip in high-pressure, swirl-stabilized, liquid-fueled combustors. Exp Fluids 61, 72 (2020). https://doi.org/10.1007/s00348-020-2898-8
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-020-2898-8