
Abstract
This work visualizes the flow surrounding a scaled model vertical axis wind turbine at realistic operating conditions. The model closely matches geometric and dynamic properties—tip speed ratio and Reynolds number—of a full-size turbine. The flow is visualized using particle imaging velocimetry (PIV) in the midplane upstream, around, and after (up to 4 turbine diameters downstream) the turbine, as well as a vertical plane behind the turbine. Time-averaged results show an asymmetric wake behind the turbine, regardless of tip speed ratio, with a larger velocity deficit for a higher tip speed ratio. For the higher tip speed ratio, an area of averaged flow reversal is present with a maximum reverse flow of \(-0.04U_\infty\). Phase-averaged vorticity fields—achieved by syncing the PIV system with the rotation of the turbine—show distinct structures form from each turbine blade. There were distinct differences in results by tip speed ratios of 0.9, 1.3, and 2.2 of when in the cycle structures are shed into the wake—switching from two pairs to a single pair of vortices being shed—and how they convect into the wake—the middle tip speed ratio vortices convect downstream inside the wake, while the high tip speed ratio pair is shed into the shear layer of the wake. Finally, results show that the wake structure is much more sensitive to changes in tip speed ratio than to changes in Reynolds number.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In 2008, the United States Department of Energy set a goal to increase the reliance on wind energy from 1.5 to 20 % by 2030 (U.S. Department of Energy 2008). To reach this goal, we must explore all available sources of wind energy. Horizontal axis wind turbines (HAWTs) are the most common technology used to convert wind to energy (Association et al. 2012). These turbines have been increasing in size, and the very large turbines are on the order of 100 m tall and can produce 8–10 MW per turbine (Grasso and Ceyhan 2014). Extensive research has been done to increase the power output of HAWT farms (Barthelmie and Jensen 2010; Cal et al. 2010; Grady et al. 2005). However, in addition to their size, large HAWTs present several installation restrictions, especially near urban areas. They require strong and steady wind (usually only available at high altitude). Further, concerns regarding their visual, acoustic, and radar signatures have severely limited the deployment of HAWTs near population centers where energy demand is greatest.
Vertical axis wind turbines (VAWTs) are less complex than HAWTs and can be effective in smaller sizes reducing the noise and radar impact. Small-scale HAWTs address some of these concerns and can be a reliable option. However, VAWTs still have some advantages over HAWTs such as their simplicity and nearly silent operation. Additionally, while a single HAWT can produce more power then a VAWT, the potential power density for the swept area is greater in VAWT farms (Dabiri 2011). By looking at multiple full-scale VAWTs, counter rotating turbines showed the potential to give an order-of-magnitude improvement to wind farm power density (Dabiri 2011). The potential to increase power density can be seen by looking at point velocities behind an array of VAWTs. A distance of 6 diameters is required to recover 95 % of the upwind velocity for a VAWT compared to the 14 diameters required by HAWTs (Kinzel et al. 2013).
Currently, the wakes of isolated VAWTs have been studied both experimentally and numerically with various degrees of fidelity. Darrieus straight-bladed VAWTs, for example, are usually modeled with simplified momentum, vortex, or cascade models (see Islam et al. 2008 for a recent review). Momentum models use blade element theory, which estimates the induced velocity across the rotor, relating the aerodynamic forces on the blades (from the values of the drag and lift coefficients of their airfoils) with the momentum variation through the turbine. Several empirical modifications have been introduced to the model to account for the effects of additional parameters, such as the blade pitching during its rotation, the presence of shaft and supports, the rotor solidity, the interference between blades, and the dynamic stall phenomena (Wilson and Lissaman 1974; Strickland 1977; Paraschivoiu 1981). The overall predictive capability of the models, however, remains limited, especially for high tip speed ratios and high solidity.
Scale modeling of the VAWT shows complex vortices from each blade at low Reynolds numbers of 39,000 (Howell et al. 2010). However, VAWTs may exhibit wake patterns closer to that of the traced cylinder in more realistic conditions (Dabiri 2011). Vortex suppression at low Reynolds numbers in rotating cylinders was shown by Chan et al. (2011), with both experimental and numerical techniques. Vertical axis wind turbines may have some similar wake properties as the cylinders and as a result give the potential for vortex suppression (Mittal and Kumar 2003). However, work on spinning cylinders has not yet accounted for accurate VAWT geometry or realistic operating conditions. Recently, there has been work to describe the wake of a VAWT at realistic operating conditions (Tescione et al. 2014; Barsky et al. 2014; Posa et al. 2016).
This research expands upon current knowledge of VAWTs using wind tunnel models at high Reynolds number. Insight behind the results seen in previous large-scale VAWT farm experiments can be further explored in model testing that has higher spatial and temporal resolution. Our work examines how these wake structures develop under dimensionless parameters close to normal operating conditions for a range of parameters.
2 Experimental setup and methods
2.1 Model setup
We have measured the flow field at the midplane of a one-fourth-scale model VAWT. The scale model is mounted in a wind tunnel and driven at constant rotational velocity. The flow field is measured using particle imaging velocimetry (PIV) at the midplane of the model. Additionally, the velocity in a vertical plane directly behind the turbine is measured to determine the magnitude of spanwise velocity behind the turbine, specifically at the midplane. The wind tunnel environment allows Reynolds number and tip speed ratio to be known and controlled throughout the experiment.
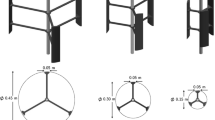
The model turbine design is based on a CAD model of a full-scale 1.2 kW Windspire VAWT. The geometric and dynamic parameters of the full-scale and model VAWT are given in Table 1. Our experimental setup varies from the full-scale model due to experimental constraints. For simplicity, and to match results with our numerical collaborators, symmetric NACA0022 airfoils with a chord-to-diameter ratio of 6:1 are used. This chord-to-diameter ratio increases the solidity of the turbine, and future work will look at the effect of this ratio on the wake. The height of our scale model is limited by the dimensions of the wind tunnel. Dimensionless parameters are used to scale the dynamic characteristics. In this experiment, Reynolds number based on the turbine diameter (\(Re=DV\rho /\mu\)) and tip speed ratio \((\hbox {TSR}=\omega D/2V)\) provide scales for the freestream and rotational velocity in the setup. By modeling similar Reynolds numbers and tip speed ratios, we can expect to see wake profiles that are similar to those of a full-scale VAWT.

The CAD model of the scale turbine and drive system shows three blades (NACA0022 airfoils) mounted around a central shaft. The chord length of the airfoil is 1/6th that of the diameter of the swept cylinder (\(c/D=1/6\)). The shaft extends the entire height of the test section. The drive system and sensors are located under the wind tunnel
The experiment is mounted in an open-end wind tunnel. The test section of the tunnel is 0.91 m (width) \(\times\) 0.36 m (height) \(\times\) 2.44 m (length). The turbine is mounted on a test plate set 0.6 m into the test section. The tunnel’s velocity is set with a digital frequency controller (L700, Hatachi). The wind tunnel was calibrated using PIV. To achieve similarity with the full-scale turbines, unless otherwise noted, the Reynolds number is set to 180,000 based on the turbine diameter (note that, as this is a 1/6 diameter-to-chord ratio turbine, the Reynolds number based on the blade chord is \(Re_c=cV\rho /\mu =\) 30,000). Three values of tip speed ratio were used, \(\hbox {TSR}_\mathrm{low}=0.9, \hbox {TSR}_\mathrm{mid}=1.3\) and \(\hbox {TSR}_\mathrm{high}=2.2\). In all cases, the freestream velocity was held constant at \(U_\infty =9.3\) m/s while the rotational velocity was changed to adhere to the desired tip speed ratio.
To investigate the effect of Reynolds number alone, the tip speed ratio is held constant at the middle value, \(\hbox {TSR}_\mathrm{mid}=1.3\), and three Reynolds numbers are used, \(Re=\) 60,000, 120,000 and 180,000 (which are equivalent to chord based Reynolds numbers of \(Re_c=\)10,000, 20,000 and 30,000). The tip speed ratio is kept constant by varying the free stream velocity and adjusting the rotational speed of the rotor accordingly.
The model turbine is created using the parameters shown in Table 1. The model blades are symmetric NACA0022 airfoils with a chord length of 5 cm. The blades and struts are custom printed plastic made using an Objet24 3D printer (Stratasys, Eden Prairie, MN). A computer-aided design (CAD) model of the turbine is shown in Fig. 1. This figure shows components used to create, mount, and drive the model. To mount the turbine in the tunnel, a high-speed/high-load steel ball bearings with shaft collar mount (McMaster Carr,Robbinsville, NJ) holds the shaft where it connects to the mounting plate at the base of the wind tunnel and to the top of the tunnel. The turbine’s rotational velocity is driven by a NEMA stepper motor (Automotion Direct, Cumming, GA) set to maintain tip speed ratios of 0.9, 1.3, and 2.2. To connect the turbine to the motor, a center flexible shaft coupling is used with a Buna-N Spider (McMaster Carr, Robbinsville, NJ). Labview is used to command a control board (NI-USB 6343, National Instruments, Austin, TX) that determines the rotational rate sent to a stepper driver (STP-DRV-6575,Automotion Direct, Cumming, GA) that drives the motor. The rotational speed is measured using an optical encoder (TRDA-2E360VD, Automotion Direct, Cumming, GA) connected by a coupling (STP-MTRA-SC-1412, Automotion Direct, Cumming, GA). An infrared sensor (IRS-P, Monarch Instruments, Amherst, NH) is used as well to confirm the rotational rate.
2.2 Flow visualization

PIV data are collected in a low-speed wind tunnel at the George Washington University Virginia Science and Technology Campus; a schematic of the test section is shown above. a Shows an isometric view wherein the turbine, laser and laser sheet, and cameras are positioned to measure the velocity in the midplane directly behind the turbine model. b Shows the end view for the same configuration, and c shows the end view with the cameras and laser positioned to measure the velocity in the vertical plane directly behind the turbine
PIV is used to measure the flow at the horizontal and vertical midplanes of the turbine (see Fig. 2). A Litron PIV 50–50 laser (Litron Lasers, Warwickshire, England) is projected through internal optics to create a light sheet. For the horizontal plane, this sheet is projected parallel to the floor of the tunnel directly through the glass sides. For the vertical plane, the light sheet is again projected through the sides of the wind tunnel test section but near the bottom. A \(45^\circ\) first surface mirror, \(2^{\prime \prime }\) by \(12^{\prime \prime }\), is used to reflect the sheet vertically. Black felt is used on the sides and bottom of the imaging plane to reduce reflections and glare. The turbine blades are painted flat black and sanded to reduce glare inside the turbines path. Due to camera views and reflections, there is masking from glare on the blades and struts and there are areas of blocked laser light.
The imaging is done using two Imager sCMOS cameras (LaVision, Inc., Ypsilanti, MI) mounted above the tunnel for the horizontal plane and on the side of the tunnel for the vertical plane (see Fig. 2). The cameras image the laser sheet looking normal through a one-quarter inch polycarbonate ceiling. The flow is seeded with a rocket fogger (LaVision, Inc., Ypsilanti, MI) that release 1-micron particles (aerodynamic diameter) of water-based fog. Under these flow conditions, this yields a Stokes number of 0.001, allowing us to assume very low error in our tracing accuracy. The calibration is performed using a printed 1-cm dot grid and a third-order polynomial calibration model in the DaVis software. Each camera has a field of view of approximately 177 mm (width) by 211 mm (length) that is overlapped by 45 mm (width) creating a rectangular field of view. The fields of views are then combined to get a full plane, which can be seen in Fig. 3. At the midplane of the turbine 14 fields of view are combined as shown in Fig. 3a. To look at the vertical velocity, along the span of the turbine blades, a single field of view is taken at the vertical plane directly before and after the turbine.
To get phase-averaged data, an optical encoder sends a trigger to the timing unit once per revolution. The LaVision Programmable Timing Unit (PTU-9) then uses a timing delay to trigger the PIV system at specific locations in its rotation. Due to symmetry, the phase-averaged results are taken through one-third of a rotation. The maximum laser frequency of 50 Hz allows for triggering at the same location in consecutive revolutions. An infrared sensor (IRS-P) with a self-powered sensor interface module (SPSR-115/230) is used to confirm the rotational speed of the turbine.

Flow around the turbine is created by taking phase-averaged velocity data in 16 separate planar location. For the midplane, horizontal view (a), 14 overlapping fields of view are used to construct the large \(x-\)and \(y-\)velocity component flow field. The vertical plane data consist of two non-overlapping planes of data (b), one upstream and one downstream of the center of the turbine. For the vertical planes, the x- and z-components of velocity are measured
In Fig. 3, the data collection planes are shown. The reference frame is centered at the midpoint of the turbine. The freestream velocity is moving in the positive x direction. The z axis is defined along the turbine shaft, and the y axis completes a right handed frame. The turbine is rotating clockwise, which with the positive z axis out of the plane, gives a negative rotational velocity \(\omega\). To allow for a positive blade progression we define an angle \(\theta\) as positive in the clockwise direction. Here \(\theta =0\) is defined where the blade at \(x/R=0, y/R=-1\). To describe the cycle, we use windward to refer to the cycle where the blade sees the freestream (\(\theta =0^\circ\) to \(180^\circ\)) and leeward on the other side (\(\theta =180^\circ\) to \(360^\circ\)). Additionally, we will refer to the upstroke as when the blade is moving against the freestream (\(\theta =-90^\circ\) to \(90^\circ\)) and similarly the downstroke where the turbine blade is moving with the freestream (\(\theta =90^\circ\) to \(270^\circ\)).
The data shown are time averages and phase averages. Time averages, average through the entire turbine cycle. Phase averages are taken at 12 positions as the turbine progresses. At each position multiple images are taken when the turbine is at the same position. Because the turbulence of the wake varies, the number of images used for averaging varies relative to the distance from the turbine. Inside the turbines swept path, 250 images are averaged. Downstream of the turbine, 150 velocity fields are captured at each position. Upstream of the turbine, the velocity field is largely uniform and 50 images are used in phase averaging.
3 Results and discussion
The wake behind a VAWT is asymmetric due to the rotation, similar to that of a spinning cylinder (Karabelas et al. 2012). However, the additional geometric complexity in the VAWT creates a wake distinct from that of a solid spinning body. We are looking at the midplane of a scaled VAWT, but assume the structures we see are representative of full-scale turbines based on geometric and dynamic scale matching, though limitations in height and friction scaling do add some uncertainty. Due to the height constraint in the wind tunnel, we do not capture three-dimensional effects. Imaging at the midplane assumes a two-dimensional flow, an assumption that is strengthened by looking at the vertical (normal) plane behind the turbine. Because of frictional scaling, our models are driven to match tip speed ratio. This matching causes energy to be introduced into the wake. At these high Reynolds numbers much of the energy being introduced to the system is being added to compensate for frictional forces. Thus, the flow fields shown in the results are still comparable to high Reynolds number free spinning turbines (Araya and Dabiri 2015).
3.1 Vertical plane
The wake is measured at the midplane surrounding the turbine and the wall normal plane centered behind the turbine. The focus of this paper is a comparison among wakes at tip speed ratios at the midplane. While comparing these wakes, even with a shorter H/D ratio, we assume a two-dimensional flow field at the midplane. To verify this assumption, the wall normal plane is imaged behind the turbine. In Fig. 4a, the ensemble-averaged, normalized vertical velocity (\(u_z\)) is shown. Figure 4b shows a representative phase-averaged, normalized vertical velocity field (the entire video is available online as supplemental materials to this paper). Note that the center of the turbine span—where all subsequent data were taken, marked by the small dashed line—is located at \(z/H=0\). The top of the turbine is located at \(z/H=0.5\) and is marked by a large dashed line.
While three-dimensional structures are clearly present near the tips of the turbine, these structures do not travel into the midplane of the turbine. The phase-averaged vertical velocity, \(u_z\) has a maximum magnitude of 56 % of the freestream velocity, \(U_\infty\), but this occurs at \(z/H=0.49\)—far from the midplane. The nature of these structures is affected by the presence of the top of the tunnel (only 0/25 of the span above the top of the turbine), much different from the operating condition of these turbines. This result does, however, further validate the assumption that the results from imaging the horizontal midplane are not significantly affected by our shortened H/D ratio.

Wall normal velocity normalized by the freestream, \(u_z/U_\infty\), is shown for \(\hbox {TSR}_\mathrm{high}=2.2\). a Shows the time-averaged profile. b Shows a representative phase-averaged result. The origin is at the center of the turbine at the midplane; the top half of the flow field is shown here. The lines show: top of tunnel (solid line at top), top of turbine (dashed line), and midplane of turbine (dotted line at the bottom)
3.2 Time-averaged flow fields
The previous subsection showed results from the vertical midplane. Moving forward all the results will be in the horizontal midplane of the turbine. The time-averaged velocity fields show an asymmetric wake with a large reduction in the streamwise velocity relative to the incoming flow. In Fig. 5, the average streamwise velocity is compared at the midplane for the low tip speed ratio (Fig. 5a), middle tip speed ratio (Fig. 5b), and high tip speed ratio (Fig. 5c). The flow is from left to right with the turbine (path is outlined by the dotted circle) rotating clockwise. The freestream velocity is the same (9.3 m/s) for all three experiments. The tip speed ratio is changed by varying the turbine’s rotation speed. The contour scales are the same for all three cases, and the turbine is centered at (0,0).
For all three tip speed ratios shown in Fig. 5, the turbine produces an asymmetric wake, with the region of wake deficit skewing behind the upstroke of the turbine (negative y-region). This effect is the weakest for \(\hbox {TSR}_\mathrm{low}\). Figure 5a shows that the flow always remains in the direction of the incoming flow—there are no regions of reverse flow—and the lowest average stream wise velocity is 41 % of \(U_\infty\).
Similarly for \(\hbox {TSR}_\mathrm{mid}\), there are no regions of reverse flow, as shown in Fig. 5b. However, there are distinct regions inside the wake where the flow has a substantial reductions in velocity, up to 27 % of \(U_\infty\). Additionally, for a given distance downstream from the turbine, the velocity can be highly variable (this will be explored in depth in Sect. 3.2 where the phase-averaged wakes are presented).
For the high tip speed ratio shown in Fig. 5c, there is a more uniform wake up to one radius downstream of the edge of the turbine (from \(x/R=1\) to \(x/R=2\)). Beyond this, there is an area of reverse flow in the higher tip speed ratio that is not seen at the lower tip speed ratios—the black region bordered in white from \(x/R=2.46\) to \(x/R=3.75, y/R\) is approximately \(-0.53\). Here, time-averaged streamwise velocities reach a minima of \(-0.04U_\infty\).

Time-averaged streamwise velocity is shown for TRS of a \(\hbox {TSR}_\mathrm{low}=0.9\) (top panel), b \(\hbox {TSR}=1.3_\mathrm{mid}\) (middle panel), and c \(\hbox {TSR}_\mathrm{high}=2.2\) (bottom panel). The position (in chord lengths) has its origin at the center of the VAWT. Incoming flow is from the left with a velocity of 9.3 m/s for each cases. Velocity scales are the same for each case. The higher tip speed ratio has a distinct region of reverse flow shown inside the white boundary which has a maximum averaged velocity of \(-0.04U_\infty\) m/s

The top row shows the average streamwise velocity; the bottom row shows the average cross-stream velocity. Lines are plotted along planes normal to the freestream. Locations start at a distance of 1.5 radii behind the VAWT center (located at (0,0)) to 4 radii in intervals of 0.5. The left column plots profiles for the middle tip speed ratio \(\hbox {TSR}_\mathrm{mid}=1.3\) and the right profiles for the high tip speed ratio \(\hbox {TSR}=2.2\). Looking at the streamwise profiles in c there is a region of average reverse flow at the high tip speed ratio, which does not exist for the lower values
To get a quantitative understanding of the time-averaged wake, the streamwise and spanwise velocity profiles are plotted at several downstream positions for the middle and high tip speed ratios: \(x/R=1.5, 2, 2.5, 3, 3.5,\) and 4 (see Fig. 6). Recall that the center of the turbine is at \(x/R=0\). Additionally, negative value of y/R are behind the upstroke and, conversely, positive value of y/R are behind the downstroke.
The wake asymmetry shown in Fig. 5 is evident in all profiles for both tip speed ratios (\(\hbox {TSR}_\mathrm{mid}=1.3\) left panels and \(\hbox {TSR}_\mathrm{high}=2.2\) right panels). These skewed profiles are expected due to the rotation of the turbine. While both cases show skewed wakes, the specific profile shapes are not the same. These differences are caused by the wake dynamics from the individual airfoils that can be seen in the phase-averaged results (see Figs. 7 and 8).
For the streamwise profiles (Fig. 6a, c, top panels) at negative y/R locations, the velocity gradient is steep at the edge of the wake for all downstream locations. This is the region behind the upstroke of the turbine. For the high tip speed ratio we see this strong boundary at both edges of the wake with the profiles flattening dramatically around \(y/R=-1.5\) and 1.6. This steep boundary is created by a stronger shear layer behind the downstroke (\(y/R<0\)) in the high tip speed ratio case. For the middle tip speed ratio, this side of the wake has a more gradual boundary. We can see this by looking at the phase-averaged plots (Figs. 7, 8). The dynamic stall and separation for the high tip speed ratio occur as a single vortex pair being shed at the edge of the wake into the sheer layer. The middle tip speed ratio instead sheds two pairs of vortices later in the cycle that do not create a strong shear layer in the wake behind the downstroke. The single pair shed earlier strengthens the shear layer in the wake creating this distinct and sudden transition not seen at the middle tip speed ratio.
The high tip speed ratio has a greater effective blockage with lower streamwise velocity profiles behind the VAWT (see Fig. 6a, c). The average streamwise velocity in the field of view at \(x/R=2\) at the middle tip speed ratio is \(0.70U_\infty\) with the corresponding value for the high tip speed ratio being 14 % less at \(0.56U_\infty\). The wakes of both the middle and high tip speed ratios then exhibit further velocity deficits moving to \(x/R=3\). After that, the wake begins to recover, moving to \(x/R=4\). Further fields of view are necessary to see the full wake recovery.
For the high tip speed ratio, the minima in streamwise velocity (see Fig. 6c) increase in intensity moving downstream. This increase creates a region of backflow that reaches a minimum of \(-0.04U_\infty\) at \(x/R=3.13, y/R=-0.62\) (see Fig. 6c). This region of averaged flow reversal is not seen in any other case we tested.
The cross-stream velocities also show distinctive changes with tip speed ratio. Looking at positive y/R, behind the downstroke, there is distinct peak for the middle tip speed ratio. This peak initially is much larger, then decays rapidly from \(0.3U_\infty\) at \(x/R=1.5\) to \(0.1U_\infty\) at \(x/R=3\). After \(x/R=3\), the peak reaches somewhat of a steady state between \(x/R= 3{-}4\). In this range, the peak value changes by 2 % of \(U_\infty\). In contrast, the high tip speed ratio originally has two peaks in the positive y—one that matches the position of the peak for the middle tip speed ratio, but is reduced in magnitude, and a second peak inside of radius of turbine. This peak decays and shifts to a single peak at \(x/R=3\). The profile for the high tip speed ratio is changing through our entire field of view to \(x/R=4\) and does not converge like the middle tip speed ratio. This can be explained by looking at shear layer of the wake in Fig. 7. Here the stronger wake shear layer is contributing to a more robust wake that is slower to recover.
3.3 Phase-averaged flow fields
A more detailed view of the wake behind the turbine is achieved by phase-averaged velocity fields (obtained using the method described in Sect. 2.2). These results are used to show vorticity maps of the flow around the turbine for \(\hbox {TRS}_\mathrm{mid}\) and \(\hbox {TSR}_\mathrm{high}\). The results for \(\hbox {TSR}_\mathrm{low}\) are not presented in detail but are comparable to that of \(\hbox {TSR}_\mathrm{mid}\). There are some differences in the wake; however, the overall shape is similar. Phase-averaged results are created by progressing through one-third of a rotation in steps of \(10^\circ\) (see supplemental material online for videos). Figure 7 shows the wake of the turbine at six angular positions, in steps of \(20^\circ\). The left panel (a–f) shows results for \(\hbox {TSR}_\mathrm{mid}=1.3\), and the right panel (g–l) shows results for \(\hbox {TSR}_\mathrm{high}=2.2\). In each case the Reynolds number is 180,000. The turbine is represented in each image and is proceeding clockwise. The turbine location is the same for each tip speed ratio. Again \(\theta =0^\circ\) is defined when an airfoil is at the midpoint in the upstroke parallel to the freestream at \(x/R=0, y/R=-1\). While each row contains the same phase of rotation, note that the higher tip speed ratio is progressing faster in time.
There is a significant difference in the wakes between the high and middle tip speed ratios. Specifically, there are distinct differences in where vortices are formed and how they propagate into the wake. Looking at the middle tip speed ratio, the left column of Fig. 7, we see a shear layer directly behind the path of the blades during most of the windward part of their cycle (\(\theta \approx 0^\circ\) to \(135^\circ\)). As the blade begins its downstroke the shear layer rolls up into a distinct vortex pair of oppositely signed vortices (\(\theta \approx 180^\circ\)). Continuing to the end of the downstroke, we see a second vortex pair shed at the most leeward point (\(\theta \approx 270^\circ\)). That is, two pairs of vortices are shed from each blade during the downstroke. Both of these vortex pairs then convect downstream directly behind the turbine within the turbine diameter (\(y/R=\pm 1\)). Next, the blade starts its upstroke and a large stall occurs with a large positively signed vortex that is shed into the wake. This vortex is additionally fed from the shear layer shed from the previous blade upstream. This vortex then convects downstream in the shear layer of the wake. This pattern is repeated with each blade passing, or three times per turbine revolution.
In the right column of Fig. 7, the high tip speed ratio case is shown. Here the structures develop differently than for the middle tip speed ratio. Again, there is shear layer behind each blade as it moves across the windward side. These shear layers move downstream and dissipate inside the turbines swept path. Progressing into the downstroke, a vortex pair forms with a large negatively singed vortex on the outside of the turbine (\(\theta \approx 180^\circ\)). This pair convects downstream with the positively singed vortex persisting half a radius downstream of the turbine. The larger, negatively signed vortex persists at the edge of the wake creating a distinct shear layer. As the blade moves through the leeward side, a second vortex pair is not formed, and instead the trailing shear layer moves downstream and dissipates quickly in the wake. Finally, as the blade moves into the upstroke, a similar pattern to the middle tip speed ratio develops, with a positively signed vortex rolling up and combining with the sheer layer from the previous blade.
The wake structures of the middle and high tip speed ratio are most divergent during the downstroke (\(y/R>0\)). This change from shedding two pairs of vortices at the middle tip speed ratio to a single pair at the high tip speed ratio changes the overall wake shape, which can be seen in the plots of the time averages (Fig. 5).
Additionally, as the tip speed ratio increases the temporal frequency of the vortex shedding increases relative to the freestream. This causes the shed vortices and shear layers to stack closer together. We see this inside the swept path of the rotor with more shed shear layers present, as well as in the wake behind the upstroke. Here, each shed vortex is spaced closer together creating a stronger more uniform sheer layer in the wake. The wake profile changes significantly as a function of the tip speed ratio.

Main difference between the VAWT wake at a middle tip speed ratio (\(\hbox {TSR}_\mathrm{mid}=1.3\)) shown in a–f and a high tip speed ratio (\(\hbox {TSR}_\mathrm{high}=2.2\)) shown in g–l is the angle at which dynamic stall occurs. For the middle tip speed ratio, coherent vortices are shed later into the center of the wake. The out of plane (z) vorticity is plotted in the background. Panels in the same row show the same phase of motion: \(\theta =-10^\circ\) a, g, \(\theta =10^\circ\) b, h, \(\theta =30^\circ\) c, i, \(\theta =50^\circ\) d, j, \(\theta =70^\circ\) e, k, and \(\theta =90^\circ\) f, l. This figure shows a complete one-third rotation, which is cyclic with each blade. This loops the progression, so the bottom frame is the result directly before the top frame

Main difference between the VAWT wake at a middle tip speed ratio (\(\hbox {TSR}_\mathrm{mid}=1.3\)) shown in a–d and a high tip speed ratio (\(\hbox {TSR}_\mathrm{high}=2.2\)) shown in panels e–h is the presence of distinct, coherent vortices in the former while the later consists of a shear layer that does not retain its coherence. The out of plane (z) vorticity is plotted in the background. Panels in the same row show the same phase of motion: \(\theta =-30^\circ\) a, e, \(\theta =0^\circ\) b, f, \(\theta =30^\circ\) c, g, \(\theta =60^\circ\) d, h. This completes one-third rotation, which is cyclic with each blade. This loops the progression so the bottom frame is the result directly before the top frame
In a separate run, the very near field directly behind the turbine is imaged (see Fig. 8). For the field of view, see the dashed rectangle immediately behind the turbine in Fig. 3. For the middle tip speed ratio (Fig. 8a–d), there are distinct vortices that develop at the leading and trailing edge of the blade which are then shed directly behind the turbine into the wake. In Fig. 8a, a blade has left the field of view and the blade we are looking at is about to process into the field of view clockwise at top of the positive y/R region. When the blade is most leeward and normal to the freestream at Fig. 8b, there is a strong leading and trailing edge vortex attached to the blade. As the blade progresses back upstream in Fig. 8c, d, this vortex pair is shed into the wake and convects downstream. Note that the each vortex is about one chord length in diameter and retains this size as it convects downstream. This process is cyclic over one-third of a rotation—with each blade. The vortex pair shed in Fig. 8d is the one that can be seen at the start of the series for the next blade (Fig. 8a).
In the second row of Fig. 8, the same progression is shown for the high tip speed ratio. Instead of distinct leading and trailing edge vortices that detach and convect downstream behind the turbine, there is a shear layer following the blades. This shear layer convects downstream and dissipates quickly directly behind the turbine. For the higher tip speed ratio, a vortex pair is shed earlier into the shear layer out of frame and can be seen in the larger view of Fig. 7 (right panel). Because of the timing of the vortex shedding, we don’t see distinct vortices directly behind the turbine for a tip speed ratio of 2.2, but instead, see regions of weakly positive and negative vorticity. This is in contrast to the middle tip speed ratio where regions behind the turbine are less homogenous—especially behind the downstroke. The influence of these distinct regions is seen in the time-averaged plots (see Fig. 6a, c) where the cutoff is much steeper at the high tip speed ratio.
3.4 The effect of Reynolds number
While Figs. 5, 6, 7, and 8 highlight the distinct differences in the flow field surrounding a VAWT model over a range of realistic tip speed ratios, the overall structure of the flow field does not seem to be similarly sensitive to changes in Reynolds number. Figure 9 shows the time-averaged flow fields surrounding the VAWT model for \(Re=\) 60,000 (top panel), 120,000 (middle panel), and 180,000 (bottom panel), based on turbine diameter (that is 10,000, 20,000, and 30,000 Reynolds numbers based on chord, respectively). For each case, the tip speed ratio is \(\hbox {TSR}_\mathrm{mid}=1.3\) (note that Figs. 5b, 9b are the same image). We see that in all cases, the general structure of the wake is the same. There are no regions of reverse flow for any Reynolds number, and each produces an asymmetric wake.
The main differences in the wake structure over this range of Reynolds numbers is the intensity of the wake deficit. The minimum streamwise velocity behind the wake for \(Re=\) 60,000 (Fig. 9a) is \(0.32U_\infty\), while for the highest Reynolds number (Re = 180,000, Fig. 9c), it is as low as \(0.27U_\infty\). While it is reasonable to think that this trend may continue and, at high enough Reynolds number, a zero or backflow region may develop, the effect of increasing the Reynolds number by a factor of three is much less significant than increasing the tip speed ratio by a factor of 2.4. Overall, this change in Reynolds number produces very minor changes in the flow surrounding the turbine.

Time-averaged streamwise velocity is shown for \(Re_D\) of a \(Re=\) 60,000 (top panel), b \(Re=\) 120,000 (middle panel), and c \(Re=\) 180,000 (bottom panel). The position (in chord lengths) has its origin at the center of the VAWT. Incoming flow is from left to right with the turbine rotating clockwise. Velocity is scaled based on the freestream velocity for each case
4 Conclusions
Wind tunnel testing of a single VAWT at realistic operating Reynolds numbers and tip speed ratios shows distinct, asymmetric wakes behind the turbine model. The structure of the wake is strongly dependent on the tip speed ratio, while only varying slightly with Reynolds number. These results are obtained by looking at both time-averaged and phase-averaged results. In the time-averaged results we see change in both the magnitude and profile of the streamwise velocity between the low, middle, and high tip speed ratio. As the turbine increases in rotational speed there is a larger effective blockage to the flow creating a larger decrease in the streamwise velocity in the wake. At the high tip speed ratio, there is a region of backflow (negative velocity) in the streamwise direction that is not seen at the lower tip speed ratios. The profile for the middle tip speed ratio is highly asymmetric with one side of the wake having a much steeper transition to the wake region. In contrast, the high tip speed ratio has these clear wake boundaries on both sides.
The phase-averaged results give a clear picture of what is happening in the wake. For the middle tip speed ratio we see that each turbine blade produces two pairs of vortices in the downstroke that convect downstream together directly behind the turbine. In contrast, the high tip speed ratio produces one vortex pair that convects down in the edge of the wake. These results show a strong dependance on for tip speed ratio in vertical axis wind turbines.
References
Araya DB, Dabiri JO (2015) A comparison of wake measurements in motor-driven and flow-driven turbine experiments. Exp Fluids 56(7):1–15
Association AWE et al (2012) Awea us wind industry: first quarter 2012 market report
Barsky DA, Posa A, Rahromostaqim M, Leftwich M, Balaras E (2014) Experimental and computational wake characterization of a vertical axis wind turbine. American Institute of Aeronautics and Astronautics. doi:10.2514/6.2014-3141
Barthelmie RJ, Jensen L (2010) Evaluation of wind farm efficiency and wind turbine wakes at the Nysted offshore wind farm. Wind Energy 13(6):573–586
Cal RB, Lebrón J, Castillo L, Kang HS, Meneveau C (2010) Experimental study of the horizontally averaged flow structure in a model wind-turbine array boundary layer. J Renew Sustain Energy 2(013):106
Chan AS, Pa D, Jameson A, Liang C, Smits AJ (2011) Vortex suppression and drag reduction in the wake of counter-rotating cylinders. J Fluid Mech 679:343–382. doi:10.1017/jfm.2011.134
Dabiri J (2011) Potential order-of-magnitude enhancement of wind farm power density via counter-rotating vertical-axis wind turbine arrays. J Renew Sustain Energy 3:043104. doi:10.1063/1.3608170
Grady S, Hussaini M, Abdullah MM (2005) Placement of wind turbines using genetic algorithms. Renew Energy 30(2):259–270
Grasso F, Ceyhan O (2014) Usage of advanced thick airfoils for the outer part of very large offshore turbines. J Phys Conf Ser. doi:10.1088/1742-6596/524/1/012030
Howell R, Qin N, Edwards J, Durrani N (2010) Wind tunnel and numerical study of a small vertical axis wind turbine. Renew Energy 35(2):412–422
Islam M, Ting D, Fartaj A (2008) Aerodynamic models for Darrieus-type straight-bladed vertical axis wind turbines. Renew Sustain Energy Rev 12(4):1087–1109. doi:10.1016/j.rser.2006.10.023
Karabelas S, Koumroglou B, Argyropoulos C, Markatos N (2012) High Reynolds number turbulent flow past a rotating cylinder. Appl Math Model 36:379–398
Kinzel M, Mulligan Q, Dabiri JO (2013) Energy exchange in an array of vertical-axis wind turbines. J Turbul 13(38):1–13
Mittal S, Kumar B (2003) Flow past a rotating cylinder. J Fluid Mech 476:303–334. doi:10.1017/S0022112002002938
Paraschivoiu I (1981) Double-multiple streamtube model for Darrieus wind turbines. In: Second DOE/NASA wind turbines dynamics workshop. NASA CP-2186. Cleveland, OH, pp 19–25
Posa A, Parker CM, Leftwich MC, Balaras E (2016) Wake structure of a single vertical axis wind turbine. Int J Heat Fluid Flow. doi:10.1016/j.ijheatfluidflow.2016.02.002
Strickland JH (1977) A performance prediction model for the darrieus turbine. In: International symposium on wind energy systems, vol 1
Tescione G, Ragni D, He C, Ferreira CS, van Bussel G (2014) Near wake flow analysis of a vertical axis wind turbine by stereoscopic particle image velocimetry. Renew Energy 70:47–61
US Department of Energy (2008) 20 % wind energy by 2030. Tech. rep
Wilson RE, Lissaman PB (1974) Machines power wind of aerodynamics. Tech. rep., Oregon State University, Corvallis (USA)
Acknowledgments
The authors wish to thank Matthew Glasstone and Allen Schultz for their experimental assistance. We thank Antonio Posa and Elias Balaras for much insightful discussion and many helpful suggestions. Thank you to The Metro Washington Chapter of the Achievement Rewards for College Students (ARCS) Foundation and the McNichols Foundation for their financial support of my education.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (mp4 9878 KB)
Supplementary material 2 (mp4 8516 KB)
Supplementary material 3 (mp4 4487 KB)
Rights and permissions
About this article

Cite this article
Parker, C.M., Leftwich, M.C. The effect of tip speed ratio on a vertical axis wind turbine at high Reynolds numbers. Exp Fluids 57, 74 (2016). https://doi.org/10.1007/s00348-016-2155-3
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-016-2155-3