
Abstract
This paper reports on a fundamental investigation of the effects of pitching phase angle (ϕ) and pitching amplitude (α A) on the aerodynamics of a two-dimensional (2D) flapping wing executing simple harmonic motion in hovering mode. A force sensor and digital particle image velocimetry were employed to obtain the time-dependent aerodynamic forces acting on the wing and the associated flow structures, respectively. Pitching phase angle ranging from 0° to 360° at three different pitching amplitudes, that is, 30°, 45° and 60°, was studied. Our experimental results revealed that the largest lift and lift/drag ratio were achieved under the condition of advanced pitching (ϕ > 90°). However, further increasing ϕ beyond a certain value would not enhance the average lift any more. In contrast, the delayed pitching (ϕ < 90°) would cause the average lift to decrease and generally the averaged drag to increase, compared to the normal pitching (ϕ = 90°), overall reducing the lift/drag ratio greatly. Our experimental results also supported the findings of Lua et al. (J Exp Fluids 51:177–195, 2011) that there are two kinds of wing–wake interactions, and they can either enhance or reduce lift on the wing depending on the wing motion and the timing of the reverse stroke. Our results show that wing–wake interaction of the first kind normally has an adverse effect on lift generation when the wing is undergoing delayed pitching but has a positive effect on the lift when the wing is undergoing advanced pitching motion. When the ϕ became larger, the second kind of wing–wake interaction, that is, sliding of the leading edge vortex under the wing, will cause the concurrent fall in lift and drag.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The flapping-wing mode of flight is utilized widely by animals, such as insects and birds, in order to generate high lift and thrust in their flight. Conventional aerodynamic analysis, which involves quasi-steady modeling and excludes the unsteady effects, fails to account for the extra lift and thrust generation in flapping flight (Ellington 1984). This has given impetus to the studies of unsteady mechanisms to explain the extra lift and thrust production in flapping flight. Ellington et al. (1996), who used smoke flow visualization to study the airflow around both real and a hovering mechanical model of hawkmoth Manduca sexta, provided direct experimental evidence to support the importance of leading edge vortices (LEV) as the source of extra lift. By measuring the instantaneous force acting on a dynamically scaled insect model, Sane and Dickinson (2002) investigated the aerodynamic effects of wing rotation and revised the quasi-steady model of flapping insect to include the effects of rotational forces, translational forces and the added mass inertia. The importance of wing–wake interaction was first recognized by Dickinson (1994) using two-dimensional (2D) motion on an inclined plate. As the wing reverses stroke, it might potentially interact with the shed vortices from previous stroke, which can lead to significant force enhancement. This phenomenon was further observed by Dickinson et al. (1999) in a study of fruit fly using force measurements and flow visualization on a three-dimensional (3D) mechanical model. It was found that the time history of lift coefficient exhibits a peak at the beginning of each stroke and this was attributed to the wing–wake interaction, which they referred as “wake capture”. However, a numerical investigation of fruit fly in normal hovering flight was conducted by Sun and Tang (2002), who pointed out that rapid acceleration, rather the wake capture, was responsible for the observed peaks in the lift coefficient in fruit fly flight. Lua et al. (2011) applied force measurement and digital particle image velocimetry (DPIV) techniques to experimentally investigate the wing–wake interaction using a simplified 2D mechanical wing. The experimental outcomes proved that wing–wake interaction could enhance lift production on the wing. They also noted that wing–wake interaction does not generally result in lift augmentation; it may also lead to lift decrease, depending on the timing of the reverse stroke.
The mainstream literature on aerodynamics of flapping wing is very animal specific (fruit flies, dragonflies, humming birds, etc.). Due to the complexities of the flow around 3D hovering wing, some researchers have resorted to 2D scaled and more generic models. For instance, Freymuth (1990) studied thrust generation of a 2D planar wing in hovering flight. It was found that large thrust coefficients can be achieved by full utilization of dynamic stall and the corresponding flow structure for large thrust production is a jet stream. Wang (2000) conducted computational investigation of 2D hovering insect flight and revealed that downward jet-producing dipole structure can be created during every flapping cycle. Lua et al. (2008) conducted a series of experiments to study the effect of flapping frequency (or Reynolds number) and angular amplitude on the flow structures and the associated aerodynamic forces generated by a 2D hovering wing. They showed that time-resolved force coefficients during flapping are more sensitive to changes in angular amplitude than in Reynolds number. Tang et al. (2008) investigated numerically the effects of Reynolds number, reduced frequency and flapping kinematics on the aerodynamics of a hovering elliptic wing. They found that wing–wake interaction was recognized in “normal hovering” mode of motion, not in the “water-treading” mode. Their results also showed that high Reynolds number can result in asymmetric force pattern between downstroke and upstroke. Bos et al. (2008) conducted a 2D numerical study on the effects of wing kinematics on aerodynamic performance in hovering flapping wing at low Reynolds number of 110. They found that certain special features of insect kinematics, such as extra bump in angle of attack and deviation, can result in higher flight performance (defined as lift-to-drag ratio).
It is believed that insects maneuver by adjusting the phase of wing pitching relative to the stroke reversal in order to manipulate lift-to-drag efficiency during hovering flight (Dickinson et al. 1999; Sane and Dickinson 2001; Birch and Dickinson 2003). In an attempt to better understand the effect of wing pitching relative to wing translation, Dickinson et al. (1999) conducted an experimental study which showed that delayed pitching caused the leading edge to rotate forward relative to translation and created a downward force, whereas advanced pitching had the opposite effect and created an upward force or additional lift. In a later study by Sane and Dickinson (2001) using two different timings of advanced pitching and delayed pitching, it was found that the smaller of the two advanced pitching generated the largest lift while delayed pitching only reduced average lift. Birch and Dickinson (2003) extended the study to include wing–wake interaction of a 3D wing executing advanced pitching motion, and the result shows that at the beginning of each stroke, the wing encountered the flow induced by the leading edge vortex and the starting vortex generated in previous stroke. Under favorable angle of attack, this induced flow causes the wing to generate a large peak in the lift distribution. Wang (2000), in a related numerical study on a 2D hovering wing executing asymmetric simple harmonic motion on an inclined stroke plane, found that an advanced phase angle of 36° led to a negative average lift and a reduction in average drag.
Although the above-cited studies have provided valuable insights into the effect of advanced and delayed pitching on flapping-wing kinematic performance, the scopes of the studies are confined to a few selected advanced and delayed pitching only. Therefore, the extent of how changes in the phase angle of pitching motion (ϕ) affect the aerodynamic performance of a flapping wing remains unclear. The desire to address this issue motivated the present investigation. Here, the wing was subjected to a fixed simple harmonic heaving motion, and the angle of pitching motion (ϕ) was varied from 0° to 360° under three different pitching amplitudes (α A) of 30°, 45° and 60°. As far as we are aware, such a wide coverage of phase angles has not been attempted in the past and most of the results presented here are new.
2 Experimental setups and procedure
The experiments were carried out using a 2D hovering experimental setup located in the Fluid Mechanics Laboratory at National University of Singapore. It consists of three sub-systems: flapping-wing mechanism, direct force measurement system and DPIV system.
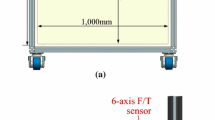
The flapping-wing mechanism (shown in Fig. 1) was supported by aluminum frame which was secured on the top of a 1 m × 1 m × 0.38 m tank. The tank was filled with working fluid to a height of 0.36 m from the bottom of the tank. The flapping motion of the wing consists of simultaneous heaving motion and pitching motion, which are independently controlled by two MDrive23plus Microstepper motors. The heaving motion was achieved through a ball screw, which converts the turning motion of the translating motor into a linear motion of the pitching subassembly, highlighted in Fig. 1. The pitching motion of the wing was directly driven by the pitching motor through a brass shaft and bearings. The accuracy and repeatability of the flapping motion were regularly checked using the aligned DPIV camera. The error of the motion was less than two-pixel size in the captured image, which corresponds to 0.36 mm or 0.006c. In order to minimize mechanical vibration during the wing motion, each of the mechanical parts was carefully designed and properly aligned. Moreover, the resolutions of the motors were set at 0.18°/step for translating motion, with the corresponding linear translation of 0.01 mm/step and 0.05625°/step for the pitching motion. This was found to be sufficient to ensure that the mechanical vibration was maintained at a low level, which was proved to have an insignificant affect on the vortex-shedding process in the study of Lua et al. (2007) using similar experimental apparatus. In all cases, Labview programs were written to control the motion of the motors, which were connected to the PC through a National Instruments Digital I/O card.

CAD drawing of flapping-wing mechanism
The rigid wing is made of aluminum alloy and has a biconvex profile with a chord length (c) of 60 mm, a span (L) of 300 mm (i.e., L/c = 5) and the radius of curvature of 121.875 mm. To prevent the scattering of the laser light in DIPV measurement, the wing was anodized black. Two circular end plates of 200 mm in diameter and 1.5 mm thick were installed at each end of the wing in order to minimize the three-dimensional effect of the flow. The wing was attached to a force sensor through a brass wing holder. When the whole flapping mechanism was securely mounted on top of the tank, the gap between the lower end plate and the bottom of the tank was about 30 mm. The pitching axis of the wing was located at half of the chord, and the pitching and heaving kinematics are described by
where α and ϕ are the instantaneous pitch and phase angle between the pitching and heaving motion, respectively. Here, if α > 90°, it is referred to as negative pitch angle. Based on phase angle (ϕ), the flapping motion can be divided into three categories (schematically illustrated in Fig. 2): advanced pitching (ϕ > 90°), normal pitching (ϕ = 90°) and delayed pitching (ϕ < 90°). Three pitching amplitude (α A), namely 30°, 45° and 60°, were considered, and in all the cases, heaving amplitude (A) was fixed at 90 mm (i.e., 1.5c). Same frequency f = 0.16667 Hz was adopted for both heaving and pitching motions. The Reynolds number (Re = U rms c/v), based on the chord length and root-mean-square velocity of the heaving motion, was maintained at 1,332.

Schematic illustration of categories of flapping motion. a Advanced pitching. b Normal pitching. c Delayed pitching
The flapping motion of the wing was synchronized with the DPIV system and the force measurement system. This is to ensure that captured flow structures around the wing were synchronized with the aerodynamic forces acting on the wing. The DPIV system consists of a Nd-YAG pulsed laser as the light source and a double-shutter digital camera. The laser sheet was aligned to pass through the middle of the wing span, and the time between pulses was set at a short interval of 8 ms. The particle images were digitally acquired using a Pixelfly camera with a resolution of 1,360 pixel by 1,024 pixel. The camera was set up horizontally parallel to the bottom of the tank, and a 45° inclined front reflective mirror was installed below the tank to reflect the wing image into the camera. A precision ruler, at the height of the mid-span of the wing, parallel to the laser sheet was used to carefully align the camera. The working fluid was glycerin/water mixture with 75.12 % by weight of glycerin and 24.88 % by weight of water, giving a density of 1,094.14 kg/m3 and a kinematic viscosity of 2.996 × 10−6 m2/s (i.e., three times that of water). The fluid was seeded with 20 µm spherical glass particles with a density of about 1,000 ± 20 kg/m3.
Dantec FlowManager® software was employed to conduct evaluation and postprocessing of the captured images. Adaptive cross-correlation algorithm was used to analyze and produce the velocity vector map from the two acquired image maps. In the process of the alignment of the camera, a scaling factor of 39.208 was acquired. The size of final interrogation area was 32 by 32 pixel, refined by three steps from the initial interrogation area size of 256 by 256 pixel. The final interrogation area corresponded to a physical area of 5.77 by 5.77 mm, and together with 25 % of overlapping of interrogation area, a spatial resolution of 0.072c was achieved. A three-point symmetrical Gaussian curve-fit interpolation scheme was employed in order to realize sub-pixel accuracy for the velocity vectors. The time interval of each pair of images was chosen so that the fastest moving particle in the flow would travel only 20 % of the interrogation area (32 pixels). The uncertainties in the DPIV measurement consist of random error and bias error (see Bourgoyne et al. 2003). With a sub-pixel resolution of around 0.1 pixel, the uncertainty caused by random error in the magnitude of velocity, for a particle displacement of 6.4 pixels (32 pixels times 20 %), is about 1.56 % of the true value. The bias error stems mainly from the uncertainty in the process of image scaling. By using a precision ruler to align the imaging camera, the scaling error was minimized to less than 0.2 % of the true value. Therefore, in the worst-case scenario, our DPIV measurement provides accuracy in the velocity vectors with error less than 1.76 % of the maximum heave velocity. As for the accuracy of vorticity field, it is estimated based on the error analysis conducted by Luff et al. (1999). For the present study, the average error in the vorticity field was estimated to be less than 4 % relative to its value, based on the simple difference method of calculating vorticity used in Dantec algorithm. In order to resolve the shadow problem posed by the laser passing the opaque wing, every set of experiment was repeated with a reversed wing orientation and motion of the wing. The results from the ‘reverse runs’ were later flipped and merged into the void region. Detailed description of how this process is carried out can be found in Lua et al. (2011).
The direct force measurement system consists of a two-component force sensor, a Wheatstone bridge, a Butterworth filter and a data acquisition subsystem in a digital computer equipped with data acquisition (A/D) card. The core component of the system was a self-made 2D force sensor, which was installed at the base of the wing above the fluid (see Fig. 1). The sensor has four bending bars, and each surface of the bars (16 faces altogether) was glued with strain gages, which were connected to Wheatstone bridges. The Wheatstone bridges translated the changes in the strain gage resistances into analog voltage outputs. These outputs were amplified by an amplifier and then passed through Butterworth low-pass filters with a cutoff frequency of 20 Hz, which was 30 times higher than the flapping frequency. Using A/D data acquisition card, the outputs from the filters were converted into digital signals (with sampling rate of 100 Hz). These signals were subsequently converted to force and moment information using a linear conversion matrix obtained from calibration and verification processes. A maximum measurement capacity of the sensor of ±10 N was achieved based on the range of the A/D card and the noise level of the analog output signal from the digital filter. The sensor has a resolution of ±0.003 N. The measuring error of the sensor was controlled below 3 % of the true value. This was achieved through frequent sensor verification by applying known weights in all four directions (axial and normal to the wing) at predetermined distances from the sensor center. The captured force was then compared against the applied weights. The measured forces were digitally smoothened using a 21-point mean smooth algorithm, which does not alter the trend of the forces. This took arithmetic average of 21 data points around (ten points before and ten points after) a specific chosen one.
The instantaneous lift (F L) and drag (F D) were determined by resolving the captured forces (F N and F A) normal and parallel to the wing according to the instantaneous pitch angle α, schematically illustrated in Fig. 3. It should be noted that the positive direction of the lift is defined perpendicular to the heaving motion and the positive direction of the drag is opposite the instantaneous heaving velocity, which will switch direction between the downstroke and upstroke, due to the reciprocal property of the flapping motion. The corresponding lift and drag coefficients are obtained by
where ρ is the density of the glycerin/water mixture (1,094.14 kg/m3), S is the wing platform area equal to 0.018 m2 and \(U_{\text{rms}}^{2}\) represents the root mean square of the heaving velocity (U rms = \(\sqrt 2 \pi fx_{\text{A}}\) = 0.0667 m/s).

Schematic illustration of synthesis of lift (F L) and drag (F D)
3 Results and discussion
Before presenting the results, it is important to define the term “instantaneous pitch angle (α)” clearly to avoid confusion. For the pitching motion governed by Eq. (1), α is defined relative to the x-axis which is fixed. However, there are instances during the downstroke when the wing experiences α larger than 90° (see Fig. 4a), or during the upstroke when α smaller than 90° (see Fig. 4b). Under these circumstances, the instantaneous α is referred to as negative pitch angle for easy description from the viewpoint of the wing motion.

Description of negative pitch angle. a During the downstroke when α(t) > 90°, b during the upstroke when α(t) < 90°
All the results presented are based on laboratory coordinate system, and the time t is normalized by the period (T = 1/f) of the flapping motion, flow velocity by root-mean-square velocity of the wing motion (U rms) and vorticity by flapping frequency (f). Also, to be consistent with Lua et al. (2008), the same description of the vortex structures is adopted here. Take D8_LEV1(+) and U8_TEV1(−) as examples. Here, D and U denote the downstroke and upstroke, respectively, and the numeral subscript following D or U indicates the flapping cycle from which the vortex originated. LEV and TEV denote leading edge vortex and trailing edge vortex, respectively, and the following numeral subscript indicates the succession of the vortex formed in one stroke. The sign (+ or −) indicates the sign of rotation of the vortex (counterclockwise and clockwise, respectively).
3.1 Average force coefficients
Figure 5 shows the effects of the phase angle (ϕ) between pitching and heaving on the mean lift and drag coefficients (\(\overline{{C_{\text{L}} }}\) and \(\overline{{C_{\text{D}} }}\)) of the wing undergoing simple harmonic motions at the three pitching amplitudes (i.e., α A = 30°, 45° and 60°). Also included in this figure is the corresponding lift-to-drag ratio (\({{\overline{{C_{\text{L}} }} } \mathord{\left/ {\vphantom {{\overline{{C_{\text{L}} }} } {\overline{{C_{\text{D}} }} }}} \right. \kern-0pt} {\overline{{C_{\text{D}} }} }}\)). The \(\overline{{C_{\text{L}} }}\) and \(\overline{{C_{\text{D}} }}\) were obtained by time-averaging the temporal C L and C D in the ninth cycle of flapping (after the aerodynamic force has reached a periodic state).

Summary of average lift and drag coefficient (\(\overline{{C_{\text{L}} }}\) and \(\overline{{C_{\text{D}} }}\)) for various ϕ at three different α A and the corresponding lift-to-drag ratio (\({{\overline{{C_{\text{L}} }} } \mathord{\left/ {\vphantom {{\overline{{C_{\text{L}} }} } {\overline{{C_{\text{D}} }} }}} \right. \kern-0pt} {\overline{{C_{\text{D}} }} }}\)). a Lift coefficient, b drag coefficient, c lift-to-drag ratio
The pitching motion with ϕ in the range of 0° < ϕ < 180° was symmetric with that in the range of 180° < ϕ < 360° along the horizontal stroking plane. This symmetry is also reflected on the same \(\overline{{C_{\text{L}} }}\) and \(\overline{{C_{\text{D}} }}\) distribution, bearing in mind that the sign of \(\overline{{C_{\text{L}} }}\) is opposite for the two ranges of ϕ. For example, the case of ϕ = 240° at α A = 45° produced \(\overline{{C_{\text{L}} }}\) = −0.31 and \(\overline{{C_{\text{D}} }}\) = 2.49, which are very close (in magnitudes) to \(\overline{{C_{\text{L}} }}\) = 0.32 and \(\overline{{C_{\text{D}} }}\) = 2.61 in the case of ϕ = 60° at α A = 45° (absolute difference of 3.1 and 4.6 %, respectively). Due to this symmetry property, attention will be focused on the effects of ϕ in the range of 0° to 180° in the following discussion.
As shown in Fig. 5b, the \(\overline{{C_{\text{D}} }}\) generally exhibited a reduction in magnitude as the α A increased. This can be attributed to the fact that for a given ϕ, increasing the α A leads to a reduction in the instantaneous pitch angle during the entire flapping cycle [refer to Eq. (1)]. In all the three α A investigated, minimum \(\overline{{C_{\text{D}} }}\) occurred in the vicinity of normal pitching (ϕ = 90°), and higher α A produced a lower minimum \(\overline{{C_{\text{D}} }}\). On the other hand, the maximum \(\overline{{C_{\text{D}} }}\) in each of the three pitching amplitudes occurred in the delayed pitching region around ϕ = 30°. The largest \(\overline{{C_{\text{D}} }}\) of 4.765 was generated at ϕ = 30° for α A = 30°, which was 235 % higher than the smallest \(\overline{{C_{\text{D}} }}\).
Unlike the \(\overline{{C_{\text{D}} }}\), the \(\overline{{C_{\text{L}} }}\) does not seem to be significantly affected by changes in the pitching amplitude α A. Reducing ϕ from normal pitching would generally lead to a decrease in lift, even to a negative value when ϕ is below 30°, with the smallest value occurring at ϕ = 0°. When ϕ was increased beyond the normal pitching, lift was first enhanced to a maximum value and then decreased with increasing ϕ. Specifically, for α A = 30° and α A = 45°, the maximum lift occurred at approximately ϕ = 110° and ϕ = 120°, respectively, and for α A = 60°, at ϕ = 150°. The highest \(\overline{{C_{\text{L}} }}\) among the three cases was achieved α A = 45° and the phase difference of approximately ϕ = 120° with a value of 1.56.
With regard to the lift-to-drag ratio (see Fig. 5c), the peak \({{\overline{{C_{\text{L}} }} } \mathord{\left/ {\vphantom {{\overline{{C_{\text{L}} }} } {\overline{{C_{\text{D}} }} }}} \right. \kern-0pt} {\overline{{C_{\text{D}} }} }}\) was achieved with ϕ slightly higher than normal pitching. This happened at around ϕ = 100° for α A = 45° and α A = 60°, and approximately ϕ = 110° for α A = 30°. The best \({{\overline{{C_{\text{L}} }} } \mathord{\left/ {\vphantom {{\overline{{C_{\text{L}} }} } {\overline{{C_{\text{D}} }} }}} \right. \kern-0pt} {\overline{{C_{\text{D}} }} }}\) of 0.67 occurred at α A = 60° and ϕ = 100°, mainly due to the significant lower drag of α A = 60°.
In the following sections, the vortex structures and transient force profiles at different ϕ are analyzed to examine how changes in ϕ affect the average lift and drag force. Here, it is worth noting that Wu (1981) developed a theory to relate rigorously the aerodynamic forces and moments acting on an object to the rate of change of vorticity moments. However, as the current temporal and spatial resolution of DPIV measurements do not allow quantitative force prediction using vorticity fields, the interpretations of force behavior on the wing due to the presence of vortices is only qualitative in nature.
3.2 Normal pitching (ϕ = 90°)
In the present study, the normal pitching serves as a benchmark for the study of delayed pitching and advanced pitching, which Lua et al. (2008) did not consider in their investigation. It should be noted that in the paper of Lua et al. (2008), the effect of pitching amplitude α A in the case of normal pitching has been discussed in detail. For the sake of easy comparison and continuity, the results of normal pitching are presented briefly before the results of delayed pitching and advanced pitching are discussed.
Figure 6 compares the time history of lift and drag coefficients in the ninth cycle of flapping under normal pitching at the three different α A. Also included in this figure are the instantaneous pitch angle (Fig. 6c) and heaving velocity and acceleration (normalized by their respective maximum values) experienced by the wing in one complete cycle (Fig. 6d). In Fig. 6, t* = 8.0 is the time when the wing had just finished its eighth cycle and was about to start its new downstroke in the ninth cycle. For all different α A, the forces exhibit dual-peak patterns, similar to those reported in the experiment by Lua et al. (2008) and the numerical simulation by Wang (2004). It is also worth noting that, despite symmetry in the flapping, the force displays asymmetric distribution between downstroke and upstroke. The presence of force asymmetry, which indicates the presence of flow structure asymmetry, has also been reported by Lua et al. (2008).

Wing kinematics and force generation for normal pitching at different α A. a The lift coefficient. b The drag coefficient. c Instantaneous angle of attack. d Instantaneous heaving velocity and acceleration
The flow structures corresponding to the force distribution shown in Fig. 6 are depicted in Fig. 7. The left, middle and right columns are for α A = 30°, 45° and 60°, respectively. From Fig. 7 (at the row of t* = 8.0), it can be seen that vortices of U8_LEV1(−) and U8_TEV2(+) formed in the previous upstroke remained close to the wing, and as the wing reversed its direction to start a new stroke, it moved against the induced velocity of these two vortices, leading to a peak in both lift and drag distributions (see Fig. 6a, b, t* ≈ 8.1). This wing–wake interaction corresponded to the wake capture of the first kind proposed by Lua et al. (2011).

Velocity and vorticity fields during the downstroke for the normal pitching at different α A
Schematic drawings of two kinds of interactions are shown in Fig. 8 (duplicate from Lua et al. 2011). In the wing–wake interaction of the first kind (see Fig. 8a), the wing encounters the impingement of the flow induced by counter-rotating wake vortices formed in the previous stroke, the induced flow results in a higher relative velocity, and thus higher lift and drag generations. In contrast, the wing–wake interaction of the second kind (see Fig. 8b, c) causes both the lift and drag to decrease at the beginning of a stroke. This can be attributed to the vortex suction effect of the residue LEV formed in previous stroke (see Fig. 8b) or the residue TEV (see Fig. 8c) slides along the lower wing surface. The suction effect of these vortices on the lower surface reduces the rate of increase in the lift and drag as the wing accelerates.

Schematic of the two kinds of wing–wake interaction. Note that the interaction of the first kind produces “push” force and the interaction of the second kind produces “pull” force (reproduced from Lua et al. 2011)
As clearly indicated in Fig. 6, when α A increased, the timing of the first peak was advanced and the peak was attenuated. For example, when α A = 30°, the first peak in the lift and drag in the downstroke occurred at t* = 8.11 with peak values of C L = 2.14 and C D = 6.43, whereas for the corresponding peaks for α A = 45° were advanced to t* = 8.08 with lower values of C L = 0.93 and C D = 2.97. Further increased α A to 60° caused the first peaks to occur earlier and the peak force to weaken further. To find out why this is the case, we take a closer look at the flow fields at the very beginning of the stroke (Fig. 7, at the row of t* = 8.0). The results clearly show that increasing α A weakens the strength of U8_LEV1(−) and U8_TEV2(+) and moves U8_TEV2(+) further away from the wing as it started a new stroke. This produces a weaker induced velocity against the wing, thus causing the peak force to drop. The weaker induced velocity disappeared more quickly, reflected by the smaller remaining strength of U8_LEV1(−) as α A became larger (see Fig. 7 at the row of t* = 8.1), which would cause the first peaks to occur earlier accordingly.
As for the second peak in each of strokes, the increase in the lift after mid-stroke till around t* = 8.25 can be attributed to the combined action of growing LEV on the upper surface of the wing accompanied by relative large heaving velocity. The further increase in the lift after t* = 8.25, while the wing begins to slow down, is due to the pitching-up motion of the wing. The increase in lift due to pitching-up motion is often referred to as “rotational effect” and has also been observed in Sun and Tang (2002) and Lua et al. (2008) on a 2D wing.
However, the sustained reduction in the heaving velocity of the wing after the mid-stroke eventually dominates over the roles of LEV and “rotational effect,” causing the force on the wing to decrease. This combined action of increasing and then decreasing force leads to the inevitable formation of the second peak in the force distribution curve.
3.3 Delayed pitching (ϕ < 90°)
For the delayed pitching, the pitching motion lags behind the heaving motion. It can be seen from Fig. 5 that reducing ϕ from 90° generally caused the average lift to drop, and to even negative values for sufficiently low ϕ. To better understand how delayed pitching affects aerodynamic force generation, two specific cases of delayed pitching, i.e., ϕ = 60° and 0° of α A = 45°, were selected for detailed analysis. These two phase angles are selected because one of them (ϕ = 60°) represents a reduction in lift which still remains positive, and the other one (ϕ = 0°) represents a reduction in lift, which becomes negative. Figure 9a, b compares the time history of the lift and drag coefficients for these two selected cases. Also included in the figure is the result of normal pitching for the purpose of comparison. Figure 9c depicts the transient instantaneous pitch angle for these cases. The time-dependent heaving velocity and acceleration are the same as those shown in Fig. 6d and, therefore, are not repeated here. Figures 10 and 11 show the corresponding flow structures for ϕ = 60° and 0°, respectively.

Comparison of lift and drag coefficients for selected cases in delayed pitching. a Lift coefficient, b drag coefficient and c instantaneous angle of attack

Velocity and vorticity fields at ϕ = 60° when α A = 45°

Velocity and vorticity fields at ϕ = 0° when α A = 45°
With the delayed pitching of ϕ = 60°, negative lift was generated at the beginning and the end of each stroke (see Fig. 9a). As can be seen in Fig. 9c (red line), the wing was experiencing negative instantaneous pitch angle (see Fig. 4a for definition) from t* = 8.0 to t* = 8.08. From the flow patterns at t* = 8.0 (see Fig. 10), although U8LEV1(−) formed in the previous stroke was weaker than that in the normal pitching, the induced velocity it produced is still encountered by the wing with instantaneous negative pitch angle. This explains the generation of negative lift during this period. This wing–wake interaction observed here is similar to the wing–wake interaction of the first kind proposed by Lua et al. (2011). The only difference is that the unfavorable negative pitch angle results in the generation of negative lift. Concurrently, a large drag was generated because the wing was pitching up from negative to positive pitch angle, making it behave like a blunt body moving at a large pitch angle (close to 90°). This explains why the drag coefficient keeps increasing until t* = 8.1.
After t* = 8.08, the lift turned positive and continued to increase due to the combined action of increase in the heaving velocity and the pitching-down of the wing after the pitch angle turned positive. The increase in the heaving velocity contributed to higher aerodynamic force while the pitching-down of the wing caused the resultant force to point more toward the lift direction. It is of interest to note that after the lift reached the first peak at t* = 8.15, the magnitude reduced slightly before developed into the second peak, albeit a very small one, at t* = 8.28. Referring to Fig. 9b, c at t* = 8.1 and 8.2, it can be seen that the reduction in lift during this period is due to the D9_LEV1(+) shedding from the leading edge of the wing. But the extent of the reduction is mitigated by the generation of a new LEV [D9_LEV2(+)], resulting in only a slight reduction in lift as depicted in Fig. 9a. At t* = 8.3, although D9_LEV1(+) began to dissipate, D9_LEV2(+) had already gained significant strength, leading to the formation of the second peak.
After t* = 8.3, the wing was slowing down, reducing the lift accordingly. By the time t* = 8.4, both the vortices had dissipated significantly (see Fig. 10e). After t* = 8.4, the velocity induced by the vortices behind the wing began to impact the leeside of the wing, which is aligned at a positive pitch angle. As a result, a negative lift and a negative drag (i.e., thrust) were generated.
When ϕ was reduced to 0° (see Fig. 9a), the negative lift was produced for most of the downstroke and upstroke. In fact, positive lift was generated only for a short period between t* = 8.26 and 8.37, which accounted for only 22 % of each stroke. At the beginning of the new stroke, from t* = 8.0 to 8.1, the wing experienced a large negative lift (see Fig. 9a). From Fig. 11a, it can be seen that at t* = 8.0, the strong U8_TEV1(+) formed in the previous stroke induced a relatively high velocity which impinged directly on the wing when it started to reverse its motion. This led to a large negative lift. From t* = 8.1 to 8.15, the magnitude of the negative lift was reduced to a local minimum, probably caused by disappearing influence of the induced velocity during this period as the U8_TEV1(+) dissipated quickly. After t* = 8.15, the increase in heaving velocity rendering an increase in the negative lift as the wing’s pitch angle was still negative. After t* = 8.2, due to the pitching-down motion of the wing, the pitch angle turned positive, leading to a positive lift. However, after t* = 8.37, as the wing slowed down, the induced velocity of the vortices behind the wing was impinging on the wing’s leeward surface, reverting to negative lift again. Thus, the positive lift was only maintained for a relatively short period of time (i.e., t* from 8.26 to 8.37).
To study the effect of delayed pitching under different pitching amplitude α A, the results of ϕ = 60° for α A = 30°, 45° and 60° are compared in Figs. 12 and 13. Figure 12 shows the time history of lift and drag coefficients at ϕ = 60° for the three different α A, and Fig. 13 shows the corresponding time sequences of vorticity and velocity fields for α A = 30°, 45° and 60°. Although the flow structure of α A = 45° has been discussed earlier in Fig. 10, it is repeated here for easy reference.

Comparison of transient force characteristics when ϕ = 60° for α A = 30°, 45° and 60°. a Lift coefficient. b Drag coefficient. c Instantaneous angle of attack

Velocity and vorticity fields during the downstroke for ϕ = 60° at the three different α A. The left, middle and right column (a–c) are for α A = 30°, 45° and 60°, respectively. The frame sequence for each α A is from top to bottom (i–v)
It is clear from Fig. 12a that the lift coefficients for the three α A displayed very different patterns. At the very beginning of downstroke (i.e., t* = 8.0), larger negative lift was generated as α A was increased, which can be attributed to larger negative pitch angle for higher α A. As the wing continued its downstroke motion, the pitching-up motion caused a reduction in the negative pitch angle, and this in turn caused negative lift to decrease quickly. Furthermore, larger α A led to higher pitching-up rate and thus faster increase in the C D.
When the wing has gone past t* = 8.15, the lift of α A = 60° dropped quickly, forming a single high peak at t* = 8.15. On the other hand, the lift of α A = 45° dropped only slightly at t* = 8.15 before increasing again, forming a dual-peak pattern. As for α A = 30°, the lift continued to increase until reaching a peak value at around t* = 8.27. It appeared that larger α A caused the peak at around t* = 8.15 to gradually increase and the peak at about t* = 8.27 to decrease. To make sense of this observation, we take a closer look at the velocity and vorticity fields for all these three cases at t* = 8.2 to t* = 8.3, which were nearest to the timing of the peaks in the lift profiles.
It can be seen for all the three cases at t* = 8.2 that the D9_LEV1(+) was about to shed into the wake and the new D9_LEV2(+) was formed (see Fig. 13 at the row of t* = 8.2). In the case of α A = 30°, D9_LEV1(+) and D9_LEV2(+) combined quickly to form a concentrated LEV [see Fig. 13a (iv)] and stayed in the vicinity of the wing upper surface, thus causing the lift to continue to increase. At α A = 45°, D9_LEV1(+) continued to shed [see Fig. 13b (iv)], causing the lift to reduce and formed a peak at t* = 8.15. As for the case of α A = 60°, the D9_LEV1(+) was shed completely [see Fig. 13c (iv)] and dissipated very quickly at t* = 8.4 [see Fig. 13c (v)]. Moreover, the vortex nearer to the wing became very weak compared to the other two smaller amplitude cases, resulting in much smaller lift, which is close to zero.
For the drag, it can be seen from Fig. 12b that the drag coefficients for the three α A exhibited similar trends. The drag increased gradually during the early stage of the downstroke and reached a peak at around t* = 8.1. Beyond t* = 8.1, the drag gradually decreased, and crossed over to negative values after about t* = 8.4. The obvious differences between these three cases were the different rate of reduction in C D from t* = 8.1 to 8.4. Larger α A resulted in faster decline of the drag during this period, which can also be attributed to the earlier shedding of D9_LEV1(+) from the upper surface and lower strength of the newly formed D9_LEV2(+) at larger α A.
After t* = 8.4, both the lift and drag turned negative when the induced velocity “impinged on” the leeward surface of the wing. At this instance, the wing had a positive pitch angle and was slowing down.
It can be concluded here that delayed pitching is not beneficial to the lift generation due to the following reasons: (1) Only the leading edge vortex has positive effects on the lift generation; (2) the “rotational effect” does not make observable contribution to the lift generation, as the pitching-up of the wing occurs at the aft portion of the stroke when the wing was slowing down; (3) wing–wake interaction as well as acceleration/deceleration at the beginning and the end of stroke also generate negative lift because of unfavorable interaction of the induced velocity with the wing.
3.4 Advanced pitching (ϕ > 90°)
Unlike delayed pitching where the \(\overline{{C_{\text{L}} }}\) of the wing generally decreases monotonically with decreasing phase difference ϕ, advanced pitching produces an initial enhancement in \(\overline{{C_{\text{L}} }}\) as ϕ increases from 90° until it reached the maximum lift (see Fig. 5). Maximum average lift for all the three α A occurred under the condition of advanced pitching. Specifically, for α A = 30°, the largest average lift was achieved at ϕ = 110°, while for α A = 45° and 60°, this occurred at ϕ = 120° and 150°, respectively.
In the following, α A = 45° was selected to analyze the effect of ϕ. It can be seen from Fig. 5 that averaged lift higher than that of normal pitching was produced when ϕ ranging is between 100° and 140° and the maximum lift-to-drag ratio was achieved at around ϕ = 100°. Figure 14 shows the effect of ϕ in the context of advanced pitching at fixed α A = 45°. Here, the results of ϕ = 100° and 150° are selected for discussion because ϕ = 100° is the case which produces the best lift-to-drag ratio and ϕ = 150° represents those cases where the lift decreases with increasing ϕ. Also included in the figure is the result of normal pitching for the purpose of comparison. The corresponding flow structures for the two cases ϕ = 100° and 150° are presented in Figs. 15 and 16, respectively.

Comparison of lift and drag coefficients for selected cases in advanced pitching. a Lift coefficient, b drag coefficient and c instantaneous angle of attack

Velocity and vorticity fields at ϕ = 100° when α A = 45°

Velocity and vorticity fields at ϕ = 150° when α A = 45°
From Fig. 2a, it can be seen that the wing experiences positive pitch angle at the beginning of every stroke when it is subjected to advanced pitching. From the corresponding DPIV results (see Figs. 15a and 16a), the wing during this moment was accelerating against the induced velocity by U8_LEV1(−). As larger ϕ produces smaller pitch angle, the action of the induced velocity on the windward side caused the lift generation to increase during the beginning period. This corresponds to the “wing–wake interaction of the first kind” reported in Lua et al. (2011) (see Fig. 8).
It is of interest to note that for the case of ϕ = 150°, the lift decreases when the wing was accelerating whereas the lift of ϕ = 100° increased to a small peak similar to the case of normal pitching. Comparing the flow patterns of ϕ = 150° (Fig. 16) with those of ϕ = 100° (Fig. 15) around t* = 8.1 revealed that when ϕ = 150°, the wing was experiencing smaller instantaneous pitch angle. This provides a favorable condition for the U8_LEV1(−), which was formed in the previous stroke, to slide under the lower surface of the wing (see Fig. 16a–c). In contrast, when ϕ = 100°, U8_LEV1(−) was compressed by the wing and dissipated quickly (see Fig. 15a, b). The same is observed for normal pitching. The low pressure associated with the sliding vortex caused both the lift and drag to decrease. This phenomenon was first reported in Lua et al. (2011) who referred to this type of unfavorable sliding of the LEV beneath the wing as the “wing–wake interaction of the second kind” (see Fig. 8). It is worth noting that the sliding of the U8_LEV1(−) beneath the wing appears to delay the formation of new LEV until t* = 8.2, after which the forces increase quickly (see Fig. 16b, c).
After around t* = 8.15, the wing was translating with relatively high heaving velocity, and the rotational effect due to wing pitching-up began to occur. The wing pitching-up produced positive effect on the lift generation. A larger ϕ produced earlier wing pitch-up motion. For instance, in the normal pitching, the wing began to pitch up at the middle of the stroke (i.e., t* = 8.25), while in the cases of ϕ = 100° and 150°, the pitching-up of the wing was advanced to occur at t* = 8.22 and t* = 8.08, respectively. For ϕ = 100°, this slightly earlier pitching-up of the wing occurred before the mid-stroke when the wing was undergoing large heaving velocity, which is in contrast to the normal pitching case where the wing began to pitch up after the mid-stroke when the wing started to decelerate. Therefore, the case of ϕ = 100° took advantage of the pitching-up motion (or the rotational effect) for a slightly longer period, leading to a slightly stronger LEV formation during this period compared to the case of normal pitching [compare Figs. 15d with 7b (iv)]. As a result, a higher peak in C L was generated around t* = 8.33 for ϕ = 100°. When ϕ increased to 150°, the earlier pitching-up caused the lift to increase faster to a higher peak value compared with the corresponding ones for ϕ = 90° and 100°. But the C L dropped quickly as the instantaneous pitch angle exceeded 65° at t* = 8.24. The earlier pitching-up before mid-stroke when the wing was accelerating also increased the drag coefficient dramatically compared to those of ϕ = 90° and 100°. Therefore, increasing ϕ to a certain high value will impair the average lift while increasing the average drag (see Fig. 5).
Larger ϕ led to higher lift at the end of the stroke when the wing was decelerating. The advanced pitching caused the wing to pitch backward before the end of the stroke, compared to the normal pitching, resulting in a negative pitch angle. As the wing was “pushed” by the induced velocity of the attached LEV formed in the current stroke [i.e., D9_LEV1(+) in Figs. 15f and 16f for ϕ = 100° and 150°, respectively], a positive lift and a negative drag (i.e., thrust) were generated at the end of each stroke. This is different from the delayed pitching case where at the end of stroke, the wing was at positive pitch angle and was pushed from behind by induced velocity, producing both negative lift and drag.
The case of ϕ = 150° was selected to study the effect of α A under the condition of advanced pitching. Figure 17 compares the time history of lift and drag coefficients at ϕ = 150° for α A = 30°, 45° and 60°. The corresponding velocity and vorticity fields for α A = 30°, 45° and 60° are shown in Fig. 18. It can be seen from Fig. 17 that both lift and drag shows similar trends as α A changes, unlike in the cases of delayed pitching where the lift transient patterns exhibited significant variation with different α A.

Comparison of transient force characteristics when ϕ = 150° for α A = 30°, 45° and 60°. a Lift coefficient. b Drag coefficient. c Instantaneous angle of attack

Velocity and vorticity fields during the downstroke for ϕ = 150° at the three different α A. The left, middle and right column (a–c) are for α A = 30°, 45° and 60°, respectively. The frame sequence for each α A is from top to bottom (i–v)
At the very beginning of the new stroke (i.e., t* = 8.0), nearly the same lift coefficients of around C L = 1.3 were achieved for all the three α A. After the wing began its new stroke, uniform decrease of lift and drag coefficients occurred and reached a local minimum at t* = 8.12 for both α A = 30° and 45° and at t* = 8.11 for α A = 60°. As discussed earlier, the concurrent reduction of lift and drag during this period can be attributed to the sliding of U8_LEV1(−) beneath the lower surface of the wing as the flapping continued (see Fig. 8). The lift reduction during this period became more pronounced for larger α A. In the case of α A = 60°, where after t* = 8.08, the lift dropped to a negative value (see Fig. 17a) due to the strong suction effect posed by the sliding U8_LEV1(−) (see Fig. 18, column C). By contrast, the sliding of U8_LEV1(−) in the case of α A = 30° did not complete smoothly (Fig. 18, column A). It was compressed by the wing surface before t* = 8.2 and dissipated very quickly while sliding down toward the trailing edge. Compare this to the cases of α A = 45° and 60°, as α A became larger, the process of sliding of U8_LEV1(−) proceeded more smoothly (Fig. 18, column B and C). It can be seen from Fig. 18c (iii) and (iv) that in the case of α A = 60°, U8_LEV1(−) slided under the lower surface of the wing and eventually shed from the trailing edge, without significant interaction with the trailing edge. Hence, the remaining strength of U8_LEV1(−) was stronger compared to those of α A = 30° and 45°.
As can be deduced from Eq. (1), for the same ϕ = 150º, during the phase of pitching-up (after t* = 8.08), larger α A resulted in higher pitching-up rate of the wing. Therefore, larger α A generated more lift with faster pitching-up motion for the same translating velocity, thus forming a higher peak. Quantitatively, α A = 60° produced a peak value of C L = 4.70, compared to C L = 4.28 and 2.85 for α A = 45° and 30°, respectively.
At the end of stroke, higher lift was generated with larger α A. This was due to the interaction of the induced velocity with the wing under more favorable pitch angle as α A increased [compare Fig. 18a (v) with c (v)].
In summary for the effect of ϕ for advanced pitching, when the pitching motion leads the heaving motion by a relatively small phase angle (smaller than ϕ = 110°, 120° and 150° for α A = 30°, 45° and 60°, respectively), the wing can benefit from the rotational effect and the favorable wing–wake interaction at the beginning and the end of stroke, and thus generate a larger average lift compared to the case of normal pitching. Positive pitch angle was achieved immediately after the beginning of a stroke and remained so for a relatively long period of time. Even when the wing was sweeping with negative angle of the attack at the end of the stroke, the interaction between the induced velocity and the negative pitch angle can also produce positive lift. However, when ϕ exceeds beyond a certain value (ϕ = 110°, 120° and 150° for α A = 30°, 45° and 60°, respectively), it is not advantageous to lift generation. This is due to two reasons: (1) The unfavorable wing–wake interaction of sliding of LEV under the lower surface of the wing became significant, which lowered the lift; (2) earlier pitching does not make full use of the high heaving velocity around the mid-stroke, and consequently, this causes the lift to drop earlier after the initial increase.
4 Conclusion
A 2D generic mechanical sharp edge wing model was used to investigate the effect of pitching phase angle and pitching amplitude on force generation by flapping wing and corresponding vortex structures. The force acting on the wing was related to the flow structure qualitatively.
Results show that largest average lift and highest lift-to-drag ratio were achieved when pitching is advanced (ϕ = 100°, 120° and 150° for α A = 30°, 45° and 60°, respectively). In contrast, the delayed pitching caused the average lift to decrease, and generally the averaged drag to increase. This translated into an overall reduction in the lift-to-drag ratio.
The optimal lift generation in the case of advanced pitching is due to favorable pitch angle, regardless of whether it is positive or negative, employed to generate lift. Results show that a number of factors are responsible for the increased in the lift: (a) positive pitch angle interacted with the induced velocity of wake vortices produced in the previous stroke; (b) earlier pitching-up of the wing combined with high heaving velocity; and (c) the wing with negative pitch angle was “pushed” by the induced velocity of wake vortices as a result of the wing deceleration.
However, when phase difference exceeds a certain value (ϕ = 100°, 120° and 150° for α A = 30°, 45° and 60°, respectively), it causes the LEV to slide under the wing and leads to a fall in lift production. This effect is more pronounce when α A is large. Also, too large a phase difference can lead to too early pitching-up motion when the heaving velocity is still low and is not able to take advantage of the high heaving velocity around the mid-stroke. For these two reasons, the lift cannot be further enhanced when ϕ is further increased.
On the other hand, delayed pitching leads to the reduction in lift for the following three reasons: (a) At the start of the stroke, the wing at a negative pitch angle moved against the induced velocity of wake vortices; (b) after the mid-stroke, the wing began to pitch up when it was actually decelerating; and (c) toward the end of the stroke when the wing was slowing down, the induced velocity due to the wake vortices pushed the leeside of the wing which is at positive pitch angle. The present study also supports the two kinds of wing–wake interactions proposed in Lua et al. (2011). Wing–wake interaction of the first kind, in the present study, usually occurred at the beginning and the end of the stroke with induced velocity impinging against the wing. Based on the orientation of the wing, this kind of interaction may or may not generate the lift. The wing–wake interaction of the second kind (due to the sliding of shed LEV beneath the wing) was observed in the advanced pitching, when phase angle and pitching amplitude become large.
Abbreviations
- c :
-
Chord length
- C L :
-
Lift coefficient
- C D :
-
Drag coefficient
- f :
-
Flapping frequency
- F A :
-
Instantaneous force parallel to the chord
- F D :
-
Drag
- F L :
-
Lift
- F N :
-
Instantaneous force normal to the chord
- Re :
-
Reynolds number = U rms c/v
- S :
-
Wing platform area
- t :
-
Current time
- t* :
-
Non-dimensional time = t/T
- T :
-
Flapping period
- U max :
-
Maximum heaving velocity
- U rms :
-
Root mean square of the heaving velocity
- α :
-
Instantaneous pitch angle relative to the heaving motion
- ϕ :
-
Phase angle difference between pitching and heaving motion
- v :
-
Kinematic viscosity of the fluid
- ρ :
-
Density of the fluid
References
Birch JM, Dickinson MH (2003) The influence of wing–wake interactions on the production of aerodynamic forces in flapping flight. J Exp Biol 206:2257–2272
Bos FM, Lentink D, van Oudheusden BW, Bijl H (2008) Influence of wing kinematics on aerodynamic performance in hovering insect flight. J Fluid Mech 594:341–368
Bourgoyne DA, Hamel JM, Ceccio SL, Dowling DR (2003) Time-averaged flow over a hydrofoil at high Reynolds number. J Fluid Mech 496:365–404
Dickinson M (1994) The effects of wing rotation on unsteady aerodynamic performance at low Reynolds numbers. J Exp Biol 192:179–206
Dickinson MH, Lehmann F-O, Sane SP (1999) Wing rotation and the aerodynamic basis of insect flight. Science 284:1954–1960
Ellington CP (1984) The aerodynamics of hovering insect flight. 4. aerodynamic mechanisms. Philos Trans R Soc Lond B Biol Sci 305:79–113. doi:10.1098/rstb.1984.0052
Ellington CP, Van Den Berg C, Willmott AP, Thomas AL (1996) Leading-edge vortices in insect flight. Nature 384:626–630
Freymuth P (1990) Thrust generation by an airfoil in hover modes. Exp Fluids 9:17–24
Lua KB, Lim TT, Yeo K, Oo G (2007) Wake-structure formation of a heaving two-dimensional elliptic airfoil. AIAA J 45:1571–1583
Lua KB, Lim TT, Yeo KS (2008) Aerodynamic forces and flow fields of a two-dimensional hovering wing. Exp Fluids 45:1047–1065. doi:10.1007/s00348-008-0527-z
Lua KB, Lim TT, Yeo KS (2011) Effect of wing–wake interaction on aerodynamic force generation on a 2D flapping wing. Exp Fluids 51:177–195. doi:10.1007/s00348-010-1032-8
Luff J, Drouillard T, Rompage A, Linne M, Hertzberg J (1999) Experimental uncertainties associated with particle image velocimetry (PIV) based vorticity algorithms. Exp Fluids 26:36–54
Sane SP, Dickinson MH (2001) The control of flight force by a flapping wing: lift and drag. J Exp Biol 204:2607–2626
Sane SP, Dickinson MH (2002) The aerodynamic effects of wing rotation and a revised quasi-steady model of flapping flight. J Exp Biol 205:1087–1096
Sun M, Tang J (2002) Unsteady aerodynamic force generation by a model fruit fly wing in flapping motion. J Exp Biol 205:55–70
Tang J, Viieru D, Shyy W (2008) Effects of Reynolds number and flapping kinematics on hovering aerodynamics. AIAA J 46:967–976
Wang ZJ (2000) Two dimensional mechanism for insect hovering. Phys Rev Lett 85:2216–2219
Wang ZJ (2004) The role of drag in insect hovering. J Exp Biol 207:4147–4155
Wu JC (1981) Theory for aerodynamic force and moment in viscous flows. AIAA J 19(4):432–441
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lua, K.B., Zhang, X.H., Lim, T.T. et al. Effects of pitching phase angle and amplitude on a two-dimensional flapping wing in hovering mode. Exp Fluids 56, 35 (2015). https://doi.org/10.1007/s00348-015-1907-9
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-015-1907-9