
Abstract
This work studies the feasibility of using automated drip irrigation based on the volumetric soil water content measured with capacitance probes in early maturing nectarine trees (Prunus persica L. Batsch, cv. ‘Flariba’) grown in a clay–loam soil in Mediterranean conditions. An automated irrigation treatment (AUTO), based on the management allowed depletion (MAD) concept (with a feed-back control system), was compared with an irrigation-scheduling method based on the conventional crop evapotranspiration (100% ETc) as Control, under high (HWA) and low (LWA) water availability scenarios, each during three consecutive growing seasons. With HWA (no water restriction), the AUTO treatment maintained the soil water content at near field capacity (α = 10% depletion of available soil water content), and there were no significant differences between treatments in terms of the plant–soil water status, nectarine yield, or fruit quality parameters. Under LWA conditions (water deficit), the AUTO treatment (α = 10% during pre-harvest and 30% post-harvest) provided 43% less water than the Control, promoting a moderate plant water deficit, which led to a decrease in vegetative growth (winter pruning and tree canopy cover) but no significant differences in total yield and fruit quality parameters (although the total soluble solid content increased). The water use efficiency values in the AUTO treatment increased by an average of 34%. It was concluded that automated irrigation, based on MAD seasonal threshold values and monitored by means of real-time soil water content sensors, could be considered a promising tool for application in semi-arid Mediterranean agro-systems subjected to water scarcity.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Three of the 17-Sustainable Development Goals promoted by the United Nations in the 2030-29 Agenda deal with increased population (nº 2), water scarcity (nº 6), and climate change (nº 13) (www.un.org/sustainabledevelopment) in an attempt to promote a profound systemic shift towards a more sustainable economy both for people and the planet. The agricultural sector, which consumes 70% of the global water supply, must take advantage of opportunities concerning the sustainable use of water and move towards the concept of "smart agriculture" (IPCC 2014; Fereres and Soriano 2007). One contribution to this goal would be the implementation of new technologies that increase irrigation efficiency, with the main aim of sustainably covering the growing need for food for the projected increase in the population size, while also addressing environmental concerns.
Prunus species have particularly high irrigation requirements, especially during dry, hot seasons, when irrigated orchards are frequently subject to drastic reductions in water supply (Pérez-Pastor et al. 2016; Ruiz-Sánchez et al. 2010). This situation is aggravated in early maturing cultivars with their increasing water requirements during summer (Ruiz-Sánchez et al. 2018). All of this explains the growing interest in precision irrigation (PI) techniques for increasing water productivity, especially in early maturing cultivars such as some Prunus sp. (Conesa et al. 2019a; Vera et al. 2013).
The most widely used PI system is based on the standardized FAO-56 Penman–Monteith approach (Allen et al. 1998), which estimates crop evapotranspiration (ETc) as the product of the reference crop evapotranspiration (ET0) and a specific crop coefficient (Kc). The success of this approach is due primarily to the simplicity but relatively high level of robustness of the procedures, as well as its transferability (Vera et al. 2019). However, the method provides a degree of uncertainty when calculating water needs to satisfy the diversity of parameters that affect the Kc (Allen et al. 2005), meaning that local adjustment, based on thorough field experiments (Abrisqueta et al. 2013) and a knowledge of soil hydrodynamic properties, is necessary. Moreover, Ramírez-Cuesta et al. (2017) reported that accurate ET0 assessment at regional scale is complicated by the limited number of weather stations, meaning that a substantial improvement in irrigation management is needed if soil and plant water status are to be used for scheduling irrigation, especially in the case of fruit tree crops.
Since the water demand of plants depends on both soil–atmosphere conditions and the crop phenological stage (de la Rosa et al. 2014; Ortuño et al. 2010), plant water status has been regarded as the main variable determining Prunus performance (de la Rosa et al. 2015; McCutchan and Shackel 1992). In the companion paper of Conesa et al. (2019a), midday stem water potential (Ψstem) was established as the best indicator of the plant water status in early maturing nectarine trees. However, the method has many drawbacks, since it involves destructive measurements, which are time-consuming and need much careful attention on the part of technicians. Finally, it is currently impossible to automate such measurements (Abrisqueta et al. 2015), while manual measurements, using a pressure chamber in a reduced time span due to the circadian rhythms of stem/leaf water potentials (Ruiz-Sánchez et al. 2007), are impractical in large commercial orchards (Bellvert et al. 2016). Therefore, the soil water content, along with a knowledge of soil characteristics and root exploration, is regarded as important for establishing precision irrigation scheduling in fruit crops (Vera et al. 2019).
In the framework of smart agriculture and precision irrigation, new technologies based on new materials and IoT (Internet of Things) have allowed the soil water content to be measured with sensors that are used as transducers for in-field soil water monitoring, and which measure certain characteristics of the soil related to water status in a continuous and non-destructive way (Vera et al. 2021). The sensors detect changes in quantities and are based on measuring the soil matric potential (Ψm) or volumetric soil water content (VSWC) (Campbell and Campbell 1982), providing the corresponding output as an electrical signal that needs to be calibrated (Evett et al. 2002). Amongst the wide range of available devices, monitoring VSWC by capacitance–FDR (Frequency Domain Reflectometry) probes has provided excellent results in terms of precision and facility of calibration, installation, interpretation, and data transmission (Abrisqueta et al. 2012; Conesa et al. 2019a; Mounzer et al. 2008a, b,c; Paltineanu and Starr 1997; Vera et al. 2009, 2013, 2017, 2019). Calibration can be carried out using the normalized values vs. a range of VSWC data. Although the entire procedure is necessary for research purposes, the raw data are sufficient for growers to know the depth of the wetting front, maximum soil water storage, and when daily variations in the VSWC start to limit plant water uptake. Absolute VSWC values are used for scheduling irrigation, but the manufacturer’s default calibration equations might result in inaccurate VSWC estimations, and a site-specific analysis must be performed (Evett et al. 2006; Martínez-Gimeno et al. 2020).
An automated irrigation system implies operation with no manual intervention. Most pressurized systems can be automated with the help of timers and Wireless Sensor Networks (WSNs), making the irrigation process potentially more efficient. A WSN is a system composed of radio frequency transceivers, sensors, microcontrollers, and power source, which is usually a solar panel. Hardware requirements include robust radio technology, a low-cost energy-efficient processor, flexible configuration of I/O ports, a long-lifetime energy source, and a flexible open source development platform (Navarro-Hellín et al. 2015; Playán et al. 2015; Vera et al. 2017).
The most popular irrigation-scheduling protocols for fruit trees in use today are those that calculate the irrigation dose based on a feed-forward strategy, which consists of applying irrigation to replenish the water used by the plants, usually during the previous week, using crop evapotranspiration (ETc) or changes in VSWC. This time-based system uses irrigation timers as a common part of automated irrigation systems. However, timers can lead to under- or over-irrigation if they do not match current plant water needs (see Fernández-García et al. (2020) for current trends and challenges in irrigation scheduling in semi-arid areas of Spain).
As confirmed by the information gained from a number of field studies on early maturing Prunus sp. trees (Abrisqueta et al. 2010, 2012; Mounzer et al. 2008a,b,c; Vera et al. 2013, 2019), soil-based sensors allow real-time automated irrigation to be managed in accordance with different protocols and using VSWC threshold values. The most important information in this respect revealed that sensors properly installed in the main root water uptake zone become practical ‘biosensors’ for plant water status monitoring purposes.
In this respect, Vera et al. (2019) proposed an automated irrigation protocol for early maturing nectarine trees consisting of converting threshold SWC values into management allowed depletion (MAD) values to trigger/stop irrigation, thus allowing the water requirements of nectarine trees to be ascertained and more precise irrigation. Conesa et al. (2019a) reported an automated irrigation protocol based on 10% MAD during the critical period (fruit growth and early post-harvest) and 30% MAD during late post-harvest, based on the different sensitivities of the phenological stages of Prunus sp. to water deficits (Pérez-Pastor et al. 2016; Ruiz-Sánchez et al. 2010). This protocol led to a water saving of about 40% compared with irrigation scheduling based on conventional ETc calculations, while maintaining yield and fruit quality (Conesa et al. 2021).
The research describes herein aimed to assess the feasibility of using an automated irrigation-scheduling strategy based on real-time VSWC threshold values (feed-back control system), as measured with capacitance–FDR probes, in early maturing ‘Flariba’ nectarine trees grown in a clay-loam soil under Mediterranean conditions. Two water availability scenarios were considered, each covering three consecutive growing seasons: high water availability (HWA), with no water restrictions, and low water availability (LWA), in which reductions in the water provided to irrigate crops followed regulated deficit irrigation criteria. The long-term effects on plant–soil–water relations, vegetative and reproductive growth, and fruit quality were compared with the finding obtained with a conventional irrigation-scheduling strategy based on ETc (FAO-56) calculations.
Materials and methods
Experimental conditions and plant material
This research was carried out in a 0.5-ha orchard of early maturing nectarine (Prunus persica L. Batsch cv. `Flariba’, on GxN-15 rootstock) over a period covering six-consecutive growing seasons (2013/2014 to 2018/2019). The site, located at the CEBAS-CSIC experimental field station in Santomera, Murcia, Spain (38° 06′ 31′’ N, 1° 02′ 14′’ W, 110 m altitude) has a highly calcareous soil (45% calcium carbonate) and a clay–loam texture (clay fraction: 41% illite, 17% smectite, and 30% palygorskite) with a low organic matter content (1.3%) and cationic exchange capacity of 97.9 mmol kg−1 in the 0–0.5 m layer. The soil has a volumetric soil water content (VSWC) of 0.29 and 0.14 m3 m−3 at field capacity and permanent wilting point, respectively. The average bulk density is 1.43 g cm−3. A detailed description of the soil characteristics can be found in Vera et al. (2019).
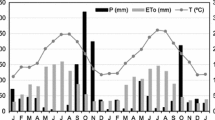
In this study, each growing season was divided into two periods: post-harvest (from May to October) and pre-harvest, the period covering fruit growth until harvest (from March to May of the following year). The climate at the site is Mediterranean, characterized by warm to hot, dry summers and mild winters. The average values of mean air temperature and total rainfall determined over 20 years at a local weather station were 17.6 ± 0.5 °C and 287.1 ± 19.9 mm, respectively. The corresponding value of annual reference crop evapotranspiration (ET0) calculated using the FAO-56, Penman–Monteith equation (Allen et al. 1998) was 1,196 ± 8.8 mm. The rainfall and ET0 values during the experimental period (2013/2014–2018/2019) are shown in Table 1.
At the beginning of the experiment (2013), the trees were 3 years old. They were spaced 6.5 m × 3.5 m and trained to an open-centre canopy. Harvesting was at the beginning of May corresponding to an early maturing cultivar, while the post-harvest period was considered best for applying water restrictions in this cultivar, when the tree is less sensitive to soil water deficits than during the fruit growth period (Chalmers et al. 1981; Girona et al. 2012; Qassim et al. 2013). A description of the phenological stages of early maturing Prunus sp. at the same location is provided elsewhere (Conesa et al. 2019b; Mounzer et al. 2008d).
The irrigation water, taken from the Tagus-Segura inter-basin transfer system, is of good quality with a mean electric conductivity of 1.3 dS m−1, thus ensuring a low risk of soil salinization. The trees were managed and fertilized through the drip irrigation system following current commercial practice, which included a routine pesticide programme, while no weeds were allowed to grow in the orchard. The fertilization programme consisted of 126-60-108-18-6 and 210-100-180-30-10 of N, P2O5, K2O, CaO, MgO UF ha−1, respectively, for young (growing season 1, 2, and 3) and adult (growing season 4, 5, and 6) trees, respectively (Vera and de la Peña 1994). Fruits were hand-thinned in March (about 1 month after full bloom) to leave 0.25 m between them (commercial crop load) and the trees were pruned annually during the dormancy period, in December. Leaf nutrient content analyses were performed yearly to adjust the fertilization programme.
Experimental design and irrigation treatments
Trees were drip irrigated with one drip line per tree row and four pressure-compensated emitters (4 L h−1) per tree located 0.5 and 1.3 m from the tree trunk on both sides of the tree.
Two irrigation-scheduling treatments were considered, distributed according to a completely randomized block design, with four replications. Each replication consisted of six trees, of which the four central trees were used for taking measurements and the remainder acted as guard trees, with a total of 16 experimental trees per irrigation scheduling treatment. No active roots were seen more than 1.5 m from the drip line as revealed by root excavation studies (Balsalobre et al. 2018; Mendez et al. 2015).
- The control treatment (Control), irrigated to satisfy full water requirements (100% of crop evapotranspiration, ETc) throughout the growing season. ETc was estimated following the approach proposed by Allen et al. (1998) by multiplying previous week reference crop evapotranspiration (ET0) values, using the Penman–Monteith equation, by the local crop coefficient (Kc) values proposed by Abrisqueta et al. (2013), and corrected by the plant cover factor (Kl) (Sharples et al. 1985), according to the previous year’s canopy tree cover values.
- The automated irrigation treatment (AUTO), which involved automatic irrigation based on MAD (management allowed depletion) (Eq. 1), used the VSWC threshold values obtained using multi-depth capacitance–FDR probes (see automated irrigation protocol). Two water availability scenarios were considered, each covering three consecutive growing seasons: HWA (high water availability) with no water restrictions, and LWA (low water availability), in which regulated deficit irrigation (RDI) criteria were applied (Conesa et al. 2021). The HWA scenario corresponded to the growth period of young trees when any adverse effect of water deficits needed to be avoided (Fig. 1).

Scheme of the Control and AUTO irrigation treatment protocols during each growing season, in the high water availability (HWA) and low water availability (LWA) scenarios. ETc: crop evapotranspiration, α: percentage of the allowed water depletion (see Eq. 1), POST: post-harvest, and PRE: pre-harvest periods
Agro-meteorological data (air temperature, relative humidity, solar radiation, wind velocity, and rainfall) were recorded by an automated weather station located 250 m from the nectarine orchard in the CEBAS-CSIC experimental field station (http://www.cebas.csic.es/general_spain/est_meteo.html), which read values every 5 min and recorded the averages every 15 min. From these data, ET0 values were calculated hourly. Growing degree hours (GDH) were calculated from air temperature data following Mounzer et al. (2008d).
Soil water status and automated irrigation protocol
Both Control and AUTO treatments used soil sensors to monitor the volumetric soil water content (VSWC) attained with multi-depth capacitance probes EnviroScan® (Sentek Sensor Technologies, Stepney, Australia). A detailed description of the operation of these dielectric sensors can be found in Vera et al. (2021). One PVC access tube was installed 0.1 m from the emitter located close (0.50 m) to the tree trunk in four representative trees, one in each replication and treatment (a total of eight probes). Each capacitance probe had sensors fitted at 0.1, 0.3, 0.5, and 0.7 m depth, and was connected to a radio transmission unit. Values were read every 5 min and the average recorded every 15 min. Probes were normalized and calibrated locally for a clay–loam soil (Abrisqueta et al. 2012; Evett et al. 2006; Paltineanu and Starr 1997). Average VSWC values in the 0–0.5 m soil profile, corresponding to the effective root depth (Abrisqueta et al. 2017), were calculated.
The automated irrigation protocol for the AUTO treatment was based on real-time VSWC threshold values, which acted on solenoid valves by means of a telemetry system. These VSWC threshold values were based on the management allowed depletion (MAD) concept (Allen et al. 1998; Merriam 1966):
where α is a percentage (RDI criteria based) of the total available soil water content (AWC) that can be depleted, AWC is calculated as FC (field capacity) – WP (wilting point) values, and z is the effective root depth (0.5 m).
Irrigation was automatically activated when mean VSWC values in the 0–0.5 m soil profile reached the threshold MAD value and stopped when the FC value was reached. In HWA, α values (Eq. 1) were maintained at around 10% (no water deficit) for the whole growing season, while in the LWA scenario, VSWC threshold values were adjusted for the different phenological stages of the cultivar under study according to its water stress sensitivity, following regulated deficit irrigation (RDI) criteria (Conesa et al. 2019b; Ruiz-Sánchez et al. 2010). This enabled trees to cope with the reduced availability of water: α was 10% during the fruit growth period (pre-harvest), and increased to 30% during post-harvest, which is a non-critical period for water deficit in fruit trees (Figs. 1 and 4).
FAO-56 proposed α values of 50% for stone fruit trees (Allen et al. 1998). However, under our drip irrigation conditions, α could not be depleted more than 30% without producing severe plant water stress (Abrisqueta et al. 2015). This difference can be attributed to the irrigation system: the one-dimensional water flow in flood irrigation compared to the tri-dimensional water flow in drip irrigation.
Automation was managed with addVANTAGE (ADCON Telemetry), a cloud-based platform for data visualization and processing and acting on a wireless sensor network. The feedback control system for remotely triggering/stopping irrigation was configured on this platform under the ‘Condition’ extension, and acted on the solenoid valve.
Irrigation water volume was measured with in-line water meters located at the beginning of the plot and connected to the telemetry system. Drip gauges (Pronamic, Ringkoebing, Denmark) were installed below the emitter near the capacitance–FDR probe to monitor real-time irrigation amounts and to detect any flow rate failures during the irrigation events (Vera et al. 2017, 2019).
Tree water status measurements
Tree water status was estimated by measuring midday stem water potential (Ψstem) in at least one leaf per tree of one tree per replication (n = 4 trees per treatment) of both irrigation treatments using a Scholander-type chamber (Soil Moisture Equipment Corp. Model 3000, CA, USA) and following the recommendations of Hsiao (1990). Weekly measurements were performed at midday (from 11.30 to 12.30 h GMT), throughout the growing season, from mid-April to October. Selected mature leaves near the trunk were wrapped in small black polyethylene bags and covered with silver foil for at least 2 h prior to measurement. To estimate the intensity of the water stress to which the trees were submitted, the water stress integral (SΨ) was calculated from Ψstem values at pre- and post-harvest periods of each growing season, according to the equation defined by Myers (1988):
where t is the number of measurements of Ψstem, Ψi,i+1 is the mean Ψstem for any measurement i and i + 1, Ψc is the maximum Ψstem measured during each phenological period (pre-harvest and post-harvest), and n is the number of days in the period.
The water stress integral for the AUTO treatment was normalized with respect to the Control treatment as: SΨAUTO = SΨControl − SΨAUTO.
Fruit and shoot growth dynamics
During each growing season, the equatorial diameter of the fruit was measured weekly from the beginning of March (just after thinning) until harvest, in 20 nectarine fruits per tree (five fruits in each cardinal quadrant), randomly selected from four trees per treatment (one per replication), using a digital calliper (0–150 ± 0.01 mm; Mitutoyo, CD-15D, Japan). In the same trees, shoot length was determined throughout every growing season on four tagged shoots per tree (one shoot per cardinal quadrant) on four trees per treatment (one per replication), using a tape measure.
Fruit and shoot growth rates were obtained using the following expressions
where X is the equatorial fruit diameter or shoot length measured each day, respectively, and t is the time between two consecutive measurements.
Vegetative growth measurements
Trunk diameter was measured annually before harvest with a forest calliper instrument (Codimex-C100cm, Canada) on four trees per replication (n = 16 trees per treatment) at a marked location about 0.3 m from the soil surface. Trunk cross-sectional area (TCSA) was estimated as being equivalent to that of a circle. The annual increment in TCSA (ΔTCSA) was calculated as the difference between two consecutive TCSA measurements.
Pruning weight was determined each growing season during winter dormancy (December), by weighing the shoots eliminated from four trees per replication (n = 16 trees per treatment) of each irrigation treatment. Pruning weight is shown as dry mass after drying shoot samples in a ventilated oven at 60 °C until constant weight.
In the same trees, tree canopy cover was estimated in the summer of each growing season, by zenithal-tree image analysis, following the procedure indicated in Conesa et al. (2019b). Photographs were taken early in the morning with a digital camera (Logitech Pro Webcam C910) mounted on a tripod at a height of 7 m on the vertical axis of the trees. The images were analysed using Corel PHOTO-PAINT X4 software and the effective shade was estimated from the percentage of tree canopy cover.
Yield and fruit quality
Nectarine fruits were harvested at commercial maturity on 1–2 harvesting days starting at the beginning of May each year. Yield and efficiency parameters were measured in all the experimental trees (n = 16 trees per treatment). Total yield was weighed with an electronic scale (0–6000 ± 2 g, Scaltec, Model SSH 92, USA), and the number of fruits per tree was counted. Fruits affected by cracking were previously removed and were not considered in the study. Average fruit mass was calculated from total mass and number of fruits per tree. Nectarines were separated in the field by manual calibration into five fruit diameter categories, according to EEC directive 3596/90 (EC-No 1221/2008), where 51 mm is the minimum diameter for an early maturing nectarine fruit to be considered in the “Extra” category.
Irrigation water use efficiency (IWUE, kg m−3) and production efficiency (PE, g cm−2) were calculated as the ratio of yield to the volume of irrigation water applied each growing season, and the ratio to TCSA, respectively. Crop load efficiency (CLE, fruits cm−2) was determined as the ratio of number of fruits per tree to TCSA.
Fruit quality at harvest was assessed in 80 fruits per treatment (n = 20 nectarines per replication). External fruit colour was measured using a Konica Minolta Chroma Meter CR-10, Osaka, Japan) and the results were expressed in CIEL*a*b* chromatic coordinates: L* (lightness), a* (red–green component), b* (blue–yellow component). From these values, chromaticity or Chrome [C* = (a*2 + b*2) ½] and hue angle [h° = tan−1 (b*/a*)] were calculated. Total soluble solids were evaluated in the juice squeezed with a juice extractor (Orbegozo LI-5000, Spain), using a handheld refractometer (Atago ATC-1, Tokyo, Japan), and values were expressed as °Brix.
Statistical analysis
All data were analysed using SPSS 20 (IBM, Armonk, NY, USA). A two-way analysis of variance (ANOVA) was performed considering treatment (T) and growing season (S) as main effects, separately for HWA and LWA scenarios. Only when the T × S interaction was statistically significant (p ≤ 0.05), data of each growing season were individually analysed. Means were compared by the Least Significant Difference test at a confidence level of 95% (LSD0.05).
Results
Irrigation applied and meteorological conditions
The climatic conditions during the experimental period were characteristics of Mediterranean semi-arid conditions. Seasonal reference crop evapotranspiration (ET0) values recorded during the experimental period amounted mean values of 1159 and 1105 mm in the three growing seasons in the HWA and LWA scenarios, respectively, of which 1038 and 962 mm corresponded to the irrigation season (Table 1). The corresponding growing degree hours (GDH) averaged 75,021 and 68,821 in the HWA and LWA, respectively, which can be considered typical for early maturing cultivars. However, seasonal precipitation varied from 222 mm in HWA to 342 mm in LWA, due to the torrential rainfall registered during the winter and autumn of growing seasons 4 and 6 (Table 1).
The Control treatment was scheduled weekly based on local Kc and ET0 values, and corrected by the Kl factor (based on canopy tree cover), which had mean values of 0.62 (HWA) and 0.75 (LWA). The average water amounts applied in the Control treatment were 405.4 and 488.2 mm per growing season, in the HWA and LWA scenarios, respectively. The corresponding average values for the AUTO treatment were 444.4 and 276.9 mm, respectively. Therefore, compared with the Control, the AUTO treatment used 8% more water in the HWA scenario and 43% less water in the LWA scenario, respectively. The Control (based on conventional ETc) and AUTO (based on soil water sensors) treatments behaved similarly during the pre-harvest seasons in terms of water applied, post-harvest in the LWA scenario being the only period in which the AUTO treatment differed from the Control in this respect (Table 1).
Soil water dynamics in the soil profile
The behavior of VSWC at different soil depths in the scenario with high water availability (HWA) is depicted in Fig. 2. The mean values for AUTO and Control treatments were close to the FC values, varying from 24 to 30%, and even above FC on some days. Since the shallow topmost layer of the soil profile (0.1 m) is the most influenced by the water from irrigation, water demands of the atmosphere and root absorption, VSWC values differed much more between both irrigation treatments (Fig. 2a). Differences in VSWC values were observed between the Control and AUTO treatments during the May–July period at 0.5 m (Fig. 2c), denoting that the irrigation dose in the Control treatment did not fulfil the rapid water uptake process of the nectarines, and only provided water to the upper soil layers during this time. When rainfall events coincided with irrigation, the automatic system of the AUTO treatment stopped irrigation when the FC value was reached. Moreover, the rainfall events induced significant increases in VSWC values, especially at depths of 0.5 and 0.7 m (Fig. 2c, d).

Volumetric soil water content (VSWC) recorded every 15 min in the high water availability (HWA) scenario during growing seasons 1, 2, and 3 at: a 0.1 m, b 0.3 m, c 0.5 m, and d 0.7 m soil depths, in Control (black, ) and AUTO (blue,
) and AUTO (blue,  ) irrigation treatments. Daily rainfall events are depicted in Figs. D (vertical bars). Dashed horizontal red lines (
) irrigation treatments. Daily rainfall events are depicted in Figs. D (vertical bars). Dashed horizontal red lines ( ) indicate field capacity (FC). Vertical dotted lines delimit the beginning of the year each growing season. Main phenological periods are indicated in the top box: POST-H: post-harvest, PRE-H: pre-harvest
) indicate field capacity (FC). Vertical dotted lines delimit the beginning of the year each growing season. Main phenological periods are indicated in the top box: POST-H: post-harvest, PRE-H: pre-harvest
Similar VSWC behavior was observed in the Control treatment in the low water availability scenario (LWA), the soil profile at 0.1 m showing the greatest variations (Fig. 3).

Volumetric soil water content (VSWC) recorded every 15 min in the low water availability (LWA) scenario, during growing seasons 4, 5, and 6 at: a 0.1 m, b 0.3 m, c 0.5 m, and d 0.7 m in the soil profile, in Control (black, ) and AUTO (blue,
) and AUTO (blue,  ) irrigation treatments. Daily rainfall events are depicted in Figs. D (vertical bars). Dashed horizontal red lines (
) irrigation treatments. Daily rainfall events are depicted in Figs. D (vertical bars). Dashed horizontal red lines ( ) indicate field capacity (FC). Vertical dotted lines delimit the beginning of the year each growing season. Main phenological periods are indicated in the top box: POST-H: post-harvest, PRE-H: pre-harvest
) indicate field capacity (FC). Vertical dotted lines delimit the beginning of the year each growing season. Main phenological periods are indicated in the top box: POST-H: post-harvest, PRE-H: pre-harvest
Soil water dynamics in the effective root depth (0–0.5 m)
In the 0–0.5 m soil layer, which corresponded to the maximum root density volume (effective root depth), the threshold VSWC values imposed to trigger irrigation in the AUTO treatment were 27.5 and 24.5%, corresponding to α values of 10 and 30%, respectively (Fig. 4). Under the HWA scenario, mean VSWC values were similar in the Control and AUTO treatments, being around FC (≈ 27 and 29% during post- and pre-harvest periods, respectively) (Fig. 4a).

Mean volumetric soil water content (VSWC) recorded every 15 min, at 0–0.5 m depth, in: a HWA scenario (growing season 1,2 and 3), and b LWA scenario (growing season 4, 5 and 6), in Control (black,  ) and AUTO (blue,
) and AUTO (blue,  ) irrigation treatments. Dashed horizontal red (
) irrigation treatments. Dashed horizontal red ( ) and green (
) and green ( ) lines indicate field capacity (FC) and α (percentage of the allowed water depletion) values in the AUTO treatment, respectively. Vertical dotted lines delimit the beginning of the year of each growing season. Main phenological periods are indicated in the top box: POST-H: post-harvest, PRE-H: pre-harvest. Post- and Pre-harvest means for each scenario are indicated above the figures; ns: not significant, * p ≤ 0.05
) lines indicate field capacity (FC) and α (percentage of the allowed water depletion) values in the AUTO treatment, respectively. Vertical dotted lines delimit the beginning of the year of each growing season. Main phenological periods are indicated in the top box: POST-H: post-harvest, PRE-H: pre-harvest. Post- and Pre-harvest means for each scenario are indicated above the figures; ns: not significant, * p ≤ 0.05
Under the LWA scenario, the imposed soil water deficit (increasing α values to 30%) during the post-harvest periods of the three seasons induced significant differences in the VSWC values of the AUTO treatment, where they were 17% lower than in the Control treatment, with mean values of 25.7% (Fig. 4b).
Tree water status
The seasonal trend of midday stem water potential (Ψstem) in the Control treatment varied from − 0.35 MPa (in HWA) to − 0.43 MPa (in LWA) in the pre-harvest periods, whereas, Ψstem values were similar in both scenarios during the post-harvest periods, with mean values of − 0.74 MPa (Fig. 5a). These facts reflected the high VSWC values observed (close to FC) and with the increasingly harsh environmental conditions during summer (Fig. 2 and Table 1).

Midday stem water potential (Ψstem) of ‘Flariba’ nectarine trees: a HWA scenario (growing seasons 1, 2 and 3), and b LWA scenario (growing seasons 4, 5, and 6), in Control ( ) and AUTO (
) and AUTO ( ) irrigation treatments. POST-H: post-harvest, PRE-H: pre-harvest. The water stress integral values for the AUTO treatment (SΨAUTO) in the post- and pre-harvest periods are indicated within the figures. Post- and Pre-harvest Ψstem means for each scenario are indicated above of the figures. Different letters next to mean values indicate significant differences between irrigation treatments according to LSD0.05 test; ns: not significant, ***: p ≤ 0.001
) irrigation treatments. POST-H: post-harvest, PRE-H: pre-harvest. The water stress integral values for the AUTO treatment (SΨAUTO) in the post- and pre-harvest periods are indicated within the figures. Post- and Pre-harvest Ψstem means for each scenario are indicated above of the figures. Different letters next to mean values indicate significant differences between irrigation treatments according to LSD0.05 test; ns: not significant, ***: p ≤ 0.001
In the HWA scenario, the AUTO treatment registered similar Ψstem values to the Control treatment during both post- and pre-harvest periods (Fig. 5a), while in the LWA scenario, the value was significantly lower (about 0.27 MPa) with respect to the Control values during the post-harvest periods (Fig. 5b). During this time, the maximum difference (0.31 MPa) was observed in growing season 6, as a result of the increased α value imposed (Fig. 4b3). Note that the high α value applied during the fruit growth period (pre-harvest) did not influence the plant water status of the AUTO trees (Fig. 5b).
As expected, during the post-harvest season in the HWA scenario, the accumulated water stress integral of the AUTO trees (SΨAUTO) did not point to any water-deficit situation, as they received the same amount of water as the Control trees. Meanwhile, in the same periods of the LWA scenario, the SΨAUTO values were substantially higher (42% on average) than those of the Control (Fig. 5b), which agreed with the reduction in the amount of water applied (Table 1) after increasing the α threshold values (Fig. 1). Both, Ψstem and SΨAUTO values in the AUTO trees were indicative of a moderate plant water-deficit situation in the water restriction scenario (LWA) (Fig. 5b).
Fruit and vegetative growth
The seasonal dynamics of nectarine fruits was characterized by a continuous growth in diameter, as can be seen during the six growing seasons in Fig. 6. As is typical for early ripening cultivars, the three growth stages occurred within a short period of time. On average, the duration of these stages was 25 days from full bloom to stage I, a further 10 days for stage II and 15–20 days for stage III, as figured out from the fruit growth rate curves (Fig. 6).

Seasonal evolution of equatorial fruit diameter (symbols) and fruit growth rate (lines) of ‘Flariba’ nectarine trees: a HWA scenario (growing seasons 1, 2, and 3), and b LWA scenario (growing seasons 4, 5, and 6), in Control (●, ) and AUTO (
) and AUTO ( ,
, ) irrigation treatments. Values are mean ± SE (n = 80). Dashed horizontal red lines (
) irrigation treatments. Values are mean ± SE (n = 80). Dashed horizontal red lines ( ) indicate limit of marketability according to (EC-No 1221/2008)
) indicate limit of marketability according to (EC-No 1221/2008)
In the HWA, no differences between treatments were detected, since there was no water stress, due to the similar amounts of water received by the trees (Table 1). In the LWA scenario, only in growing season, 5 were significant differences between treatments detected by 9th of April. However, the rainfall events registered in the pre-harvest period promoted a higher fruit growth rate in the AUTO treatment and, as a result, the equatorial diameter increased (Fig. 6b2).
The shoot length presented a sigmoid trend in the growing seasons of both studied scenarios, with an exponential growth period between May and mid-June, as reflected by the higher recorded shoot growth rate (data not shown). There were no significant effects of the irrigation scheduling on shoot length in either scenario, probably due to the variability of the absolute data obtained. Moreover, mean values were higher in the HWA than LWA, pointing to the young age of the nectarine trees in the HWA scenario.
There were no significant differences between treatments in the tree canopy cover or winter pruning values registered in HWA (Fig. 7). However, as a result of the water deficit applied in the LWA scenario, the tree canopy cover decreased significantly in the AUTO treatment by 16%, and the winter pruning dry weight decreased by 31%, both compared to the Control treatment (Fig. 7). Interestingly, when the data of both vegetative parameters were pooled, a good lineal relationship was found: [tree canopy cover = − 1.16 + 0.21 pruning dry weight, r2 = 0.67, p ≤ 0.001] (data not shown).

a Tree canopy cover and b pruning dry weight of ‘Flariba’ nectarine trees in Control ( ) and AUTO (
) and AUTO ( ) irrigation treatments during the HWA scenario (growing seasons 1, 2, and 3), and LWA scenario (growing seasons 4, 5, and 6). Values are means ± SE (n = 16). Mean values of each scenario are indicated within the figures. Different letters indicate significant differences between irrigation treatments according to the LSD0.05 test; ns: not significant, *** (p ≤ 0.001)
) irrigation treatments during the HWA scenario (growing seasons 1, 2, and 3), and LWA scenario (growing seasons 4, 5, and 6). Values are means ± SE (n = 16). Mean values of each scenario are indicated within the figures. Different letters indicate significant differences between irrigation treatments according to the LSD0.05 test; ns: not significant, *** (p ≤ 0.001)
Yield parameters and efficiencies and fruit quality
At harvest, no significant (p > 0.05) effect of irrigation was observed on the yield parameters in any of the growing seasons of the studied scenarios (Table 2). Note that ‘yield’ refers only to nectarine fruits displaying adequate commercial quality traits, since non-commercial fruits (small, damaged affected by cracking and misshapen) were eliminated.
Fruit size distribution was not affected by the irrigation treatment (Fig. 8). In the HWA scenario, the mean values of fruit diameter were between 57 and 63 mm, which corresponds to category C, whereas in LWA, the values varied around 62–66 mm, corresponding to category B (Fig. 8 and Table 2), according to EEC directive 3596/90 (EC Nº 1221, 2008). Moreover, a higher number of ‘Not extra’ nectarine fruits (< 51 mm) were found with HWA (Fig. 8).

Frequency of fruit size at harvest (lines), and commercial fruit sizing distribution (bars) of ‘Flariba’ nectarine trees: a HWA scenario (mean of growing seasons 1, 2, and 3), and b LWA scenario (mean of growing seasons 4, 5, and 6) in Control ( ,
,  ) and AUTO (
) and AUTO ( ,
,  ) irrigation treatments. Bars are mean ± SE (n = 3); ns: not significant
) irrigation treatments. Bars are mean ± SE (n = 3); ns: not significant
In neither scenario were differences between treatments were detected in trunk cross-sectional area (TCSA) values (Table 2). However, in the LWA scenario, the interaction between treatment and growing season was significant (p ≤ 0.05) for the ∆TCSA values, the annual increase in TCSA being greater in AUTO than Control trees in the growing season 5 (Table 2).
The productive efficiencies varied according to the irrigation treatment imposed in each scenario of water availability (Table 2). In HWA, the irrigation water use efficiency (IWUE), calculated as the ratio of yield to irrigation water applied, was similar in both treatments, whereas in LWA, AUTO trees had higher WUE values than those of the Control treatment, reaching a value of about 10.5 kg m−3 in growing season 5, double the WUE of the Control trees (Table 2). Irrigation management in the AUTO treatment under LWA increased the WUE by up to 34% compared with conventional irrigation scheduling in the Control, as a result of the water savings achieved. However, these differences were not accompanied by differences in crop load (CLE) or production (PE) efficiencies, which were similar in both treatments (Table 2).
Under the HWA scenario, no significant differences were noted in the principal nectarine fruit quality characteristics assessed (Fig. 9). In general, AUTO treatment significantly increased the total soluble solids content (°Brix) of fruits compared with Control treatment in the LWA scenario, the most pronounced difference being in growing season 6 (Fig. 9a). Mean values of the external fruit colour parameters (L, h°, and C*) were similar in both treatments in the LWA scenario (Fig. 9b–d).

a Total soluble solids’ content (TSS) and colour parameters: b Lightness (L), c Hue angle (h°), and d Chrome (C*) of ‘Flariba’ nectarine fruits in HWA scenario (growing seasons 1, 2, and 3), and LWA scenario (growing seasons 4, 5, and 6), in Control ( ) and AUTO (
) and AUTO ( ) irrigation treatments. Values are mean ± SE (n = 80). Mean values of each scenario are indicated within the Figures. Different letters indicate significant differences between the irrigation treatments in each scenario according to the LSD0.05 test; ns: not significant, *: p ≤ 0.05
) irrigation treatments. Values are mean ± SE (n = 80). Mean values of each scenario are indicated within the Figures. Different letters indicate significant differences between the irrigation treatments in each scenario according to the LSD0.05 test; ns: not significant, *: p ≤ 0.05
Discussion
Soil-based automated irrigation allowed precise irrigation in early maturing nectarine trees cultivated in clay–loam soils under Mediterranean semi-arid conditions for both water availability scenarios assessed. The HWA scenario involved no limitation to the amount of water applied, and hence, no water deficit was considered for the AUTO treatment that received the same amount of irrigation as the Control (ranging from 4030 to 5080 m3 ha−1). In the LWA scenario, the AUTO treatment was scheduled following RDI criteria applied according to different percentages of the soil water availability, which varied from 10% (pre-harvest and early post-harvest in growing season 6) to 30% (post-harvest) of AWC (Fig. 1). The AUTO trees received an average of 2769 m3 ha−1 compared with the 4882 m3 ha−1 applied to the Control trees, without significantly affecting total yield or nectarine fruit quality.
Additional benefits of the AUTO irrigation were its ability to automatically prevent excess- and under irrigation, which was not the case for the traditional ETc-based irrigation scheduling (ET0, Kc, and Kl computations). Moreover, the feedback control system of the AUTO treatment allowed continuous monitoring of the soil water status within the root zone.
Below is an analysis of the main effects of the automated irrigation treatment for each water availability scenario, on soil–plant water relations, vegetative/reproductive growth, total yield, and fruit quality, compared to the Control treatment, in which the trees were irrigated in accordance with the computed evapotranspiration (ETc).
First, it is important to note that the use of the volumetric soil water content (VSWC) threshold values for autonomous irrigation application in the AUTO treatment would not have been possible without previously undertaking a soil textural characterization and calibrating the sensors (Evett 2002; Vera et al. 2021). No significant differences in the soil–plant water status were found between AUTO and Control treatments when no water restrictions were applied (HWA scenario) (Figs. 2, 4, and 5a). The range in VSWC values in the effective root zone (0–0.5 m) was ≈27 and ≈ 29% during the post-harvest and pre-harvest periods, respectively, in both treatments (Fig. 4A). These values agree quite closely with published values for well-irrigated early maturing Prunus trees, cultivated in clay–loam soils, such as peach trees (Abrisqueta et al. 2008, 2012; Ruiz-Sánchez et al. 2018; Vera et al. 2013, 2019) and nectarine trees (Conesa et al. 2019a, b, 2021; de la Rosa et al. 2013, 2015, 2016).
In the Control trees, the Ψstem values ranged from − 0.31 to − 0.74 MPa (during the fruit growth and post-harvest periods, respectively) (Fig. 5). Similar values were found by DeJong et al. (1986), Abrisqueta et al. (2010, 2012, 2015), Ruiz-Sánchez et al. (2018), and Vera et al. (2013, 2019) for peach trees, and De la Rosa et al. (2013, 2015), López et al. (2016), and Thakur and Singh (2013) for nectarine trees.
Knowing this range of soil–plant water status may therefore be a useful tool to assist in irrigation scheduling for early maturing nectarine orchards under well-watered conditions. Moreover, within this range, it can be assumed that there were no restrictions on vegetative growth during the growing season (including winter pruning) or total yield, fruit growth, and nectarine fruit quality (Figs. 6, 7, 8, and 9, and Table 2). Note that the ‘comfort’ state of the plant–soil water status was maintained during tree development throughout the experimental period, bearing in mind that trees were 3 years old at the beginning of the experiment.
Due to the early ripening characteristics of the cultivar in question, the three growth stages that are typical of stone fruits (Berman and DeJong 2003) were hardly differentiated in the seasonal dynamics of fruit diameter growth (Fig. 6). The duration of these stages, with a very short stage II (pit hardening), was similar to those depicted for an early maturing peach cultivar by Mounzer et al. (2008b). A compensatory fruit growth was noted in the AUTO treatment in growing season 5 (Fig. 6b2), when nectarine fruits had a higher equatorial diameter growth rate than the Control fruits, after the rainfall events (Fig. 6b2).
Under water-deficit conditions (LWA scenario), the management of irrigation in the AUTO treatment resulted in an average of 43% less water being applied than in the Control treatment over the three growing seasons (Table 1), but with no statistically significant differences (p > 0.05) in nectarine yield or fruit quality compared with the Control trees (Table 2). The AUTO treatment increased the irrigation water use efficiency (IWUE) by 34% compared with the Control treatment, as a result of the substantial water savings (Table 2). Our results agree with those of de la Rosa et al. (2015), who noted the success of applying deficit irrigation during post-harvest, which is a long non-critical period that accounts for 80–86% of the seasonal water requirements in this early maturing Prunus cultivar (Conesa et al. 2021). However, care should be taken as carbohydrate accumulation and floral differentiation occur at this time (Dichio et al. 2007). When considering the application of RDI strategies, crop conditions, such as soil depth (Girona et al. 2005; Lampinen et al. 1995), and evaporative demand conditions, are also crucial. Consequently, it is important to establish guidelines adapted to local conditions (Naor 2006) that will avoid severe plant water deficits, which would reduce bloom and fruit load in the following season (Conesa et al. 2020). In this sense, Abrisqueta et al. (2012) stated that a Ψstem value of − 0.9 MPa during the summer is an indicator of water stress initiation in early maturing peach trees.
In the LWA scenario, the average VSWC values in the AUTO treatment varied from 23.86% during the post-harvest period to 26.71% in the pre-harvest period (Fig. 4), but did not cause significant reduction in total yield or nectarine fruit quality (Table 2). Meanwhile, the average Ψstem obtained in this treatment varied from − 1.01 MPa (post-harvest) to − 0.43 MPa (pre-harvest). These values could also be used as guidelines to help farmers in evaluating the degree of water stress to be imposed in fruit tree orchards. Moreover, in other early maturing nectarine trees, de la Rosa et al. (2015, 2016) reported mean Ψstem values in a range of − 0.80 to − 1.71 MPa for RDI treatments during the post-harvest period, and suggested that they be maintained to preserve the yield and fruit quality of the following year’ s harvest.
In another woody species (plum), Millán et al. (2019) used an automated system based on soil moisture sensors to establish an RDI strategy without affecting fruit production or tree vigour with respect to a conventional RDI strategy based on 40% of ETc. Domínguez-Niño et al. (2020) stated that no effects were observed on the yield obtained using automated management treatment in apple trees, which were irrigated with a similar amount of water as used in the classical water balance method, or in smaller trees of the same species, in which the automated algorithm saved 23% irrigation water. Martínez-Gimeno et al. (2020) reported water savings of 26% compared with a Control treatment in Citrus, without any significant difference in yield, while increasing crop water productivity by 33%.
It is known that regulated deficit irrigation can affect vegetative growth in fruit trees (Chalmers et al. 1981; Pérez-Pastor et al. 2016). To avoid subsequent negative effects on yield parameters, Ruiz-Sánchez et al. (2010) indicated the need for the main periods of vegetative and fruit growth to be clearly differentiated for the successful implementation of RDI strategies. Our findings showed that the winter pruning weight and the tree canopy cover were slightly but significantly reduced in the AUTO treatment (Fig. 7), which can be considered a positive result of RDI in terms of reducing labour costs (Conesa et al. 2019b; López et al. 2008). Moreover, fruit size, trunk-cross-sectional area (TCSA), and annual shoot elongation were not sensitive to the water restrictions applied (Table 2 and Fig. 6). Indeed, the productive efficiencies’ values (WUE, PE, and CLE) were similar to those of the Control treatment (Table 2). These facts led to similar yield parameters and fruit sizing in both treatments (Table 2 and Fig. 8). De la Rosa et al. (2016) and Pérez-Pastor et al. (2014) reported a significantly higher ratio of yield to ΔTCSA in the RDI treatments compared with a Control (fully irrigated) treatment, which indicated that carbon partitioning was mainly dedicated to fruit growth at the expense of vegetative tree growth. In our study, the significantly higher ∆TCSA values in the AUTO than in the Control trees in the growing season 5 (Table 2) were attributed to the low nectarine yield harvested in that season, indicating that carbon partitioning was mainly dedicated to vegetative growth.
Finally, the AUTO treatment increased the TSS levels of nectarine fruits at harvest (Fig. 9), as seen in other nectarine cultivars submitted to RDI irrigation strategies (Falagán et al. 2015, 2016; López et al. 2016). This fact was explained by Conesa et al. (2021) as being the result of an increase in organic acid synthesis in response to water stress, as well as to an osmotic adjustment mechanism, both being related to a sweeter flavour, which implies greater acceptance on the part of consumers, who perceive this as an improvement in fruit flavour (Crisosto et al. 1994; Pedrero et al. 2014).
Conclusions
The present research, carried out in a 6-year-long field experiment in an early mature nectarine orchard located in southern Spain, showed the feasibility of using automated irrigation under two scenarios of water availability.
In the high water availability scenario, the AUTO and Control irrigation treatments (α = 10% depletion of available soil water content and ETc = 100%, respectively) showed no significant differences yield, vegetative growth or nectarine fruit quality. The soil water content was not a limiting factor and fully irrigating to achieve a maximum yield was a profitable option.
In the low water availability scenario—increasingly frequent in Mediterranean areas threatened by climate change and endemic water scarcity—increasing irrigation water efficiency is of great importance. Our results showed that precise deficit irrigation (the AUTO treatment) based on VSWC threshold values monitored by capacitance sensors saved 43% water during the irrigation season compared with a conventional ETc-based irrigation-scheduling method. Despite this savings, there were no significant differences in the yield of nectarine fruits, while total soluble solid content levels (°Brix) increased, as did irrigation water use efficiency (by an average of 34%). Furthermore, the moderate plant–soil water deficits reduced the main vegetative parameters (total pruning weight and tree canopy cover) in the AUTO trees.
The proposed automated irrigation method, combined with RDI phenological criteria, could be extrapolated for use with other stone fruit orchards under water scarcity conditions.
Data availability
All data generated or analysed during this study are included in this published article.
References
Abrisqueta JM, Mounzer O, Álvarez S, Conejero W, García Y, Tapia LM, Vera J, Abrisqueta I, Ruiz-Sánchez MC (2008) Root dynamics of peach trees submitted to partial rootzone drying and continuous deficit irrigation. Agric Water Manag 95:959–967. https://doi.org/10.1016/j.agwat.2008.03.003
Abrisqueta I, Tapia LM, Conejero W, Sánchez-Toribio MI, Abrisqueta JM, Vera J, Ruiz-Sánchez MC (2010) Response of early-maturing peach [Prunus persica (L.)] trees to deficit irrigation. Span J Agric Res 8(S2):30–39. https://doi.org/10.5424/sjar/201008s2-1345
Abrisqueta I, Vera J, Tapia LM, Abrisqueta JM, Ruiz-Sánchez MC (2012) Soil water content criteria for peach trees water stress detection during the postharvest period. Agric Water Manag 104:62–67. https://doi.org/10.1016/j.agwat.2011.11.015
Abrisqueta I, Abrisqueta J, Tapia LM, Munguía J, Conejero W, Vera J, Ruiz-Sánchez MC (2013) Basal crop coefficients for early-season peach trees. Agric Water Manag 121:158–163. https://doi.org/10.1016/j.agwat.2013.02.001
Abrisqueta I, Conejero W, Valdés-Vela M, Vera J, Ortuño MF, Ruiz-Sánchez MC (2015) Stem water potential estimation of drip-irrigated early-maturing peach trees under Mediterranean conditions. Comput Electron Agric 114:7–13. https://doi.org/10.1016/j.compag.2015.03.004
Abrisqueta I, Conejero W, López-Martínez L, Vera J, Ruiz-Sánchez MC (2017) Root and aerial growth in early-maturing peach trees under two crop load treatments. Span J Agric Res 15(2):e0803. https://doi.org/10.5424/sjar/2017152-10714
Allen RG, Pereira LS, Raes D, Smith M (1998) Crop evapotranspiration: guidelines for computing crop water requirements. Food and Agriculture Organization of the United Nations, Rome, Italy
Allen RG, Pereira LS, Smith M, Raes D, Wright JL (2005) FAO-56 dual crop coefficient method for estimating evaporation from soil and application extensions. J Irrig Drain Eng 131:2–13. https://doi.org/10.1061/(asce)0733-9437(2005)131:1(2)
Balsalobre N, Koptsyukh E, Ruiz-Sánchez MC, Vera J, Conejero W, Nicolás MJ (2018) Riego deficitario y raíces de nectarinos. V Congreso IDIES “I+D en Institutos de Enseñanza Secundaria” Murcia, 26 junio 2018. ISBN: 978-84-09-03063-7
Bellvert J, Marsal J, Girona J, González-Dugo V, Fereres E, Ustin SL, Zarco-Tejada PJ (2016) Airborne thermal imagery to detect the seasonal evolution of crop water status in peach, nectarine and Saturn peach orchards. Remote Sens 8:39. https://doi.org/10.3390/rs8010039
Berman ME, DeJong TM (2003) Seasonal patterns of vegetative growth and competition with reproductive sinks in peach (Prunus persica). J Hortic Sci Biotech 78(3):303–309. https://doi.org/10.1080/14620316.2003.11511622
Campbell GS, Campbell MD (1982) Irrigation scheduling using soil moisture measurements: theory and practice. Adv Irrig. https://doi.org/10.1016/b978-0-12-024301-3.50008-3
Chalmers DJ, Mitchell PD, Van Heek L (1981) Control of peach tree growth and productivity by regulated water supply, tree density and summer pruning. J Am Soc Hortic Sci 106:307–312
Conesa MR, Conejero W, Vera J, Ramírez-Cuesta JM, Ruiz-Sánchez MC (2019a) Terrestrial and remote indexes to assess moderate deficit irrigation in early-maturing nectarine trees. Agronomy 9(10):630. https://doi.org/10.3390/agronomy9100630
Conesa MR, Martínez-López L, Conejero W, Vera J, Ruiz-Sánchez MC (2019b) Summer pruning of early-maturing Prunus persica: water implications. Sci Hort 256:108539. https://doi.org/10.1016/j.scienta.2019.05.066
Conesa MR, Conejero W, Vera J, Ruiz-Sánchez MC (2020) Effects of postharvest water deficits on the physiological behavior of early-maturing nectarine trees. Plants 9:1104. https://doi.org/10.3390/plants9091104
Conesa MR, Conejero W, Vera J, Agulló V, García-Viguera C, Ruiz-Sánchez MC (2021) Irrigation management practices in nectarine fruit quality at harvest and after cold storage. Agric Water Manag 243:106519. https://doi.org/10.1016/j.agwat.2020.106519
Crisosto CH, Johnson RS, Luza JG, Crisosto GM (1994) Irrigation regimes affect fruit soluble solids concentration and rate of water loss of ‘O’Henry’ peaches. HortSci 29:1169–1171. https://doi.org/10.21273/hortsci.29.10.1169
De la Rosa JM, Conesa MR, Domingo R, Torres R, Pérez-Pastor A (2013) Feasibility of using trunk diameter fluctuations and stem water potential reference lines for irrigation scheduling of early nectarine trees. Agric Water Manag 126:133–141. https://doi.org/10.1016/j.agwat.2013.05.009
De la Rosa JM, Conesa MR, Domingo R, Pérez-Pastor A (2014) A new approach to ascertain the sensitivity to water stress of different plant water indicators in extra-early nectarine trees. Sci Hortic 169:147–153. https://doi.org/10.1016/j.scienta.2014.02.021
De la Rosa JM, Domingo R, Gómez-Montiel J, Pérez-Pastor A (2015) Implementing deficit irrigation scheduling through plant water stress indicators in early nectarine trees. Agric Water Manag 152:207–216. https://doi.org/10.1016/j.agwat.2015.01.018
De la Rosa JM, Conesa MR, Domingo R, Aguayo E, Falagán E, Pérez-Pastor A (2016) Combined effects of deficit irrigation and crop level on early nectarine trees. Agric Water Manag 170:120–132. https://doi.org/10.1016/j.agwat.2016.01.012
DeJong TM (1986) Effects of reproductive and vegetative sink activity on leaf conductance and water potential in Prunus persica (L) Batsch. Sci Hortic 29:131–137. https://doi.org/10.1016/0304-4238(86)90039-7
Dichio B, Xiloyannis C, Sofo A, Montanar G (2007) Effects of post-harvest regulated deficit irrigation on carbohydrate and nitrogen partitioning, yield quality and vegetative growth of peach trees. Plant Soil 290:127. https://doi.org/10.1007/s11104-006-9144-x
Domínguez-Niño JM, Oliver-Manera J, Girona J, Casadesús J (2020) Differential irrigation scheduling by an automated algorithm of water balance tuned by capacitance-type soil moisture sensors. Agric Water Manag 228:105880. https://doi.org/10.1016/j.agwat.2019.105880
Evett SR, Laurent, JP, Cepuder P, Hignett C (2002) Neutron scattering, capacitance, and TDR soil water content measurements compared on four continents. In: Proc. 17th World Congress of Soil Science. Aug. 14–21. Bangkok, Thailand. p 1021–1031
Evett S, Tolk JA, Howell TA (2006) Soil profile water content determination. Vadose Zone J 5:894
Falagán N, Artés F, Artés-Hernández F, Gómez PA, Pérez-Pastor A, Aguayo E (2015) Comparative study on postharvest perfomance of nectarines grown under regulated deficit irrigation. Post Biol Techn 110:24–32. https://doi.org/10.1016/j.postharvbio.2015.07.011
Falagán N, Artés F, Gómez PA, Artés-Hernández F, Conejero W, Aguayo E (2016) Deficit irrigation strategies enhance health-promoting compounds through the intensification of specific enzymes in early peach. J Sci Food Agric 96:1803–1813. https://doi.org/10.1002/jsfa.7290
Fereres E, Soriano MA (2007) Deficit irrigation for reducing agricultural water use. J Exp Bot 58(435):147–159. https://doi.org/10.1093/jxb/erl165
Fernández-García I, Lecina S, Ruiz-Sánchez MC, Vera J, Conejero W, Conesa MR, Domínguez A, Pardo JJ, Llélis BC, Montesinos P (2020) Trends and challenges in irrigation scheduling in the semi-arid area of Spain. Water 12:785. https://doi.org/10.3390/w12030785
Girona J, Fereres E (2012) Peach. In: Steduto P, Hsiao TC, Fereres E, Raes D (eds) Crop yield response to water. FAO Irrigation and Drainage Paper No. 66, Rome, pp 266–280
Girona J, Gelly M, Mata M, Arbonés A, Rufat J, Marsal J (2005) Peach tree response to single and combined deficit irrigation regimes in deep soils. Agric Water Manag 72:97–108. https://doi.org/10.1016/j.agwat.2004.09.011
Hsiao TC (1990) Measurement of tree water status. In: Steward BA, Nielsen DR (eds) Irrigation of Agricultural Crops Agronomy Monograph No.30. American Society of Agronomy, Madison, WI, pp 243–279
IPCC (2014) Intergovernmental Panel on Climate Change 2014: Synthesis Report. Contribution of Working Groups I, II and III to the fifth assessment report of the intergovernmental panel on climate change. Core writing team, R.K. Pachauri and L.A. Meyer (eds). IPCC, Geneva, Switzerland, p 151
Lampinen BD, Shackel KA, Southwick SM, Olson B, Yeager JT (1995) Sensitivity of yield and fruit quality of French prune to water deprivation at different fruit growth stages. J Am Soc Hort Sci 120:139–147. https://doi.org/10.21273/jashs.120.2.139
López G, Arbonés A, del Campo J, Mata M, Vallberdy X, Girona J, Marsal J (2008) Response of peach trees to regulated deficit irrigation during stage II of fruit development and summer pruning. Span J Agr Res 6(3):479–491. https://doi.org/10.5424/sjar/2008063-340
López G, Echeverría G, Bellvert J, Mata M, Behboudian MH, Girona J, Marsal J (2016) Water stress for a short period before harvest in nectarine: yield, fruit composition, sensory quality, and consumer acceptance of fruit. Sci Hortic 211:1–7. https://doi.org/10.1016/j.scienta.2016.07.035
Martínez-Gimeno MA, Jiménez-Bello MA, Lidón A, Manzano J, Badal E, Pérez-Pérez JG, Bonet L, Intringliolo DS, Esteban A (2020) Mandarin irrigation scheduling by means of frequency domain reflectometry soil moisture monitoring. Agric Water Manag 235:e106151. https://doi.org/10.1016/j.agwat.2020.106151
McCutchan H, Shackel KA (1992) Stem-water potential as a sensitive indicator of water stress in prune trees (Prunus domestica L. cv. French). J Am Soc Hortic Sci 117:607–611. https://doi.org/10.21273/jashs.117.4.607
Méndez A, Blaya JM, López-Torres FJ, Rodríguez E, Conejero W, Vera J, Ruiz-Sánchez MC (2015) Distribución de raíces de nectarino en distintas condiciones de riego. II Congreso IDIES Murcia. https://doi.org/10.13140/RG.2.1.3133.8720
Merriam JL (1966) A management control concept for determining the economical depth and frequency of irrigation. Transactions ASAE 9(4):492–498. https://doi.org/10.13031/2013.40014
Millán S, Casadesús J, Campillo C, Moñino MJ, Prieto MH (2019) Using soil moisture sensors for automated irrigation scheduling in a plum crop. Water 11:2061. https://doi.org/10.3390/w11102061
Mounzer OH, Vera J, Tapia LM, García-Orellana Y, Conejero W, Abrisqueta I, Ruiz-Sánchez MC, Abrisqueta JM (2008a) Irrigation scheduling of peach trees by continuous measurement of soil water status. Agrociencia 42(8):857–868
Mounzer OH, Mendoza R, Abrisqueta I, Tapia LM, Abrisqueta JM, Vera J, Ruiz-Sánchez MC (2008b) Soil water content measured by FDR probes and thresholds for drip irrigation management in peach trees. Agric Téc México 34(3):313–322
Mounzer OH, Mendoza R, Abrisqueta I, Vera J, Ruiz-Sánchez MC, Tapia LM, Plana V, Abrisqueta JM (2008c) Estimating evapotranspiration by capacitance and neutron probes in a drip-irrigated apricot orchard. Interciencia 33(8):586–590
Mounzer OH, Conejero W, Nicolás E, Abrisqueta I, García-Orellana Y, Tapia LM, Vera J, Abrisqueta JM, Ruiz-Sánchez MC (2008d) Growth pattern and phenological stages of early maturing peach trees under a Mediterranean climate. HortSci 43(6):1813–1818. https://doi.org/10.21273/hortsci.43.6.1813
Myers BJ (1988) Water stress integral—A link between short-term stress and long-term growth. Tree Physiol 4:315–323. https://doi.org/10.1093/treephys/4.4.315
Naor A, Stern R, Flaishman M, Gal Y, Peres M (2006) Effects pf post-harvest water stress on autumnal bloom and subsequent-season productivity in mid-season ‘Spadona’ pear. J Hortic Sci Biotech 81:3651–3700. https://doi.org/10.1080/14620316.2006.11512074
Navarro-Hellín H, Torres-Sánchez R, Soto-Valles F, Albaladejo-Pérez C, López-Riquelme JA, Domingo-Miguel R (2015) A wireless sensor architecture for efficient irrigation water management. Agric Water Manag 151:64–74. https://doi.org/10.1016/j.agwat.2014.10.022
Ortuño MF, Conejero W, Moreno F, Moriana A, Intrigliolo DS, Biel C, Mellisho CD, Pérez-Pastor A, Domingo R, Ruiz-Sánchez MC, Casadesús J, Bonany J, Torrecillas A (2010) Could trunk diameter sensors be used in woody crops for irrigation scheduling? A review of current knowledge and future perspectives. Agric Water Manag 97:1–11. https://doi.org/10.1016/j.agwat.2009.09.008
Paltineanu IC, Starr JL (1997) Real-time soil water dynamics using multisensor capacitance probes: laboratory calibration. Soil Sci Soc Am J 61:1576–1585. https://doi.org/10.2136/sssaj1997.03615995006100060006x
Pedrero F, Maestre-Valero JF, Mounzer O, Alarcón JJ, Nicolás E (2014) Physiological and agronomic mandarin trees performance under saline reclaimed water combined with regulated deficit irrigation. Agric Water Manag 146:228–237. https://doi.org/10.1016/j.agwat.2014.08.013
Pérez-Pastor A, Ruiz-Sánchez MC, Domingo R (2014) Effects of timing and intensity of deficit irrigation on vegetative and fruit growth of apricot trees. Agric Water Manag 134:110–118. https://doi.org/10.1016/j.agwat.2013.12.007
Pérez-Pastor A, Ruiz-Sánchez MC, Conesa MR (2016) Drought stress effect on woody tree yield. In: Ahmad P (ed) Water stress and crop plants: a sustainable approach, vol 2. John Wiley & Sons Ltd, UK, pp 356–374 (ISBN: 9781119054368. Chapter 22)
Playán E, Salvador R, Bonet L, Camacho E, Intrigliolo DS, Moreno MA, Rodríguez-Díaz JA, Tarjuelo JM, Madurga C, Zazo R, Sánchez-de-Ribera A, Cervantes A, Zapata N (2015) Assessing telemetry and remote control systems for water user’s associations in Spain. Agric Water Manag 202:311–324. https://doi.org/10.1016/j.agwat.2018.02.015
Qassim A, Goodwin I, Bruce R (2013) Postharvest deficit irrigation in ‘Tatura 204’ peach: subsequent productivity and water saving. Agric Water Manag 117:145–152. https://doi.org/10.1016/j.agwat.2012.11.011
Ramírez-Cuesta JM, Cruz-Blanco M, Santos C, Lorite IJ (2017) Assessing reference evapotranspiration at regional scale based on remote sensing, weather forecast and GIS tools. Int J Appl Earth Obs Geoinf 55:32–42. https://doi.org/10.1016/j.jag.2016.10.004
Ruiz-Sánchez MC, Domingo R, Pérez-Pastor A (2007) Daily variations in water relations of apricot trees under different irrigation regimes. Biol Plant 51(4):735–740. https://doi.org/10.1007/s10535-007-0150-5
Ruiz-Sánchez MC, Domingo R, Castel JR (2010) Review. Deficit irrigation in fruit trees and vines in Spain. Span J Agric Res 8(S2):5–20. https://doi.org/10.5424/sjar/201008s2-1343
Ruiz-Sánchez MC, Abrisqueta I, Conejero W, Vera J (2018) Deficit irrigation management in early-maturing peach crop. Water scarcity and sustainable agriculture in semiarid environment. Tools, strategies, and challenges for woody crops. Elsevier, pp 111–126. https://doi.org/10.1016/b978-0-12-813164-0.00006-5 (ISBN 978-0-12-813164-0. Chapter 6)
Sharples RA, Rolston DE, Biggar JW, Nightingale HI (1985) Evapotranspiration and soil water balance of young trickle-irrigated almond trees. Proc 3rd Int Drip/Trickle Irrig Congr Fresno CA 2:792–797
Thakur A, Singh Z (2013) Deficit irrigation in nectarine: fruit quality, return bloom and incidence of double fruits. Eur J Hortic Sci 78(2):67–75
EC Nº 121/2008: European Union, Commission Regulation (EC) No 1221/2008 of 5 December, 2008. Amending Regulation (EC) No 1580/2007 laying down implementing rules of Council Regulations (EC) No 2200/96, (EC) No 2201/96 and (EC) No 1182/2007 in the fruit and vegetable sector as regards marketing standards. OJ L 336:46–49
UNO (2020) United Nations Organization. Sustainable development GOALS. https://www.un.org/sustainabledeveloment/. Accessed 28 Oct 2020
Vera J, de la Peña JM (1994) FERTIGA: Programa de Fertirrigación de Frutales. CEBAS-CSIC, Murcia, Spain, p 69
Vera J, Mounzer OH, Ruiz-Sánchez MC, Abrisqueta I, Tapia LM, Abrisqueta JM (2009) Soil water balance trial involving capacitance and neutron probe measurements. Agric Water Manag 96:905–911. https://doi.org/10.1016/j.agwat.2008.11.010
Vera J, Abrisqueta I, Abrisqueta JM, Ruiz-Sánchez MC (2013) Effect of deficit irrigation on early-maturing peach tree performance. Irrig Sci 31:747–757. https://doi.org/10.1007/s00271-012-0358-9
Vera J, Abrisqueta I, Conejero W, Ruiz-Sánchez MC (2017) Precise sustainable irrigation: a review of soil-plant-atmosphere monitoring. Acta Hortic 1150:195–202. https://doi.org/10.17660/actahortic.2017.1150.28
Vera J, Conejero W, Conesa MR, Ruiz-Sánchez MC (2019) Irrigation factor approach based on soil water content: a nectarine orchard case study. Water 11:589. https://doi.org/10.3390/w11030589
Vera J, Conejero W, Mira-García AB, Conesa MR, Ruiz-Sánchez MC (2021) Towards irrigation automation based on dielectric soil sensors. J Hortic Sci Biotech. https://doi.org/10.1080/14620316.2021.1906761
Funding
This research was supported by the Spanish Research Agency, co-financed with European Union FEDER funds (AGL2013-49047-C02-2R, and AGL2016-77282-C03-1R), PID2019-106226RB-C21/AEI/10.13039/501100011033, and the Seneca Foundation of the Region of Murcia (19903/GERM/15) projects. M.R. Conesa acknowledges the postdoctoral financial support received from the Juan de la Cierva Spanish Postdoctoral programme (FJCI-2017-32045).
Author information
Authors and Affiliations
Contributions
Study conception and design were performed by JV and MCR-S. All authors contributed to the material preparation, data collection, and analysis study. The first draft of the manuscript was written by MRC and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
No potential conflicts of interest are reported by the authors.
Ethics approval
This research did not involve human or animal participants.
Consent to participate
All authors consented to participate.
Consent for publication
All authors consent to publication.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Conesa, M.R., Conejero, W., Vera, J. et al. Soil-based automated irrigation for a nectarine orchard in two water availability scenarios. Irrig Sci 39, 421–439 (2021). https://doi.org/10.1007/s00271-021-00736-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00271-021-00736-0