
Abstract
Natural regeneration of seismic lines, cleared for hydrocarbon exploration, is slow and often hindered by vegetation damage, soil compaction, and motorized human activity. There is an extensive network of seismic lines in western Canada which is known to impact forest ecosystems, and seismic lines have been linked to declines in woodland caribou (Rangifer tarandus caribou). Seismic line restoration is costly, but necessary for caribou conservation to reduce cumulative disturbance. Understanding where motorized activity may be impeding regeneration of seismic lines will aid in prioritizing restoration. Our study area in west-central Alberta, encompassed five caribou ranges where restoration is required under federal species at risk recovery strategies, hence prioritizing seismic lines for restoration is of immediate conservation value. To understand patterns of motorized activity on seismic lines, we evaluated five a priori hypotheses using a predictive modeling framework and Geographic Information System variables across three landscapes in the foothills and northern boreal regions of Alberta. In the northern boreal landscape, motorized activity was most common in dry areas with a large industrial footprint. In highly disturbed areas of the foothills, motorized activity on seismic lines increased with low vegetation heights, relatively dry soils, and further from forest cutblocks, while in less disturbed areas of the foothills, motorized activity on seismic lines decreased proportional to seismic line density, slope steepness, and white-tailed deer abundance, and increased proportional with distance to roads. We generated predictive maps of high motorized activity, identifying 21,777 km of seismic lines where active restoration could expedite forest regeneration.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Canada is currently the sixth largest oil producer worldwide and holds the third largest proven oil reserves (National Energy Board 2016). Alberta is the leading Canadian province in hydrocarbon production, which produces an extensive anthropogenic footprint associated with oil and gas exploration and development, including well sites, roads, pipelines, and seismic lines (Komers and Stanojevic 2013). Seismic lines are linear clearings used in the exploration phase of hydrocarbon development since the 1950s. There are over 1.5 million km of seismic lines in Alberta, making it the most prevalent anthropogenic feature on the landscape (Komers and Stanojevic 2013).
Current provincial management guidelines restrict the width of new seismic lines to a maximum of 6 m; however, pre-1990s legacy seismic lines (hereafter seismic lines) were between 6–10 m wide (Lee and Boutin 2006). Seismic lines persist on the landscape for years as vegetation recovery can be slow due to low light levels, soil disturbance, and human activity (Lee and Boutin 2006; van Rensen et al. 2015). Although restoration presents an opportunity to mitigate the impacts of hydrocarbon development, active restoration (e.g., tree planting) combined with human impact mitigation (e.g., line blocking) is necessary to restore seismic lines to pre-disturbance states (Latham and Boutin 2015). As seismic line densities in the boreal forest can reach a staggering 26 km/km2 (Tigner et al. 2015), prioritizing restoration efforts is necessary to reduce the cumulative effects of hydrocarbon development (Noss et al. 2009; Ray 2014).
Seismic lines fragment forested landscapes resulting in increased edge density, which can lead to changes in overall biodiversity and species composition across a range of taxa (Fiori and Zalba 2003; Joroenson et al. 2010). Seismic lines also increase accessibility for hunting and other recreational activities such as off-highway vehicle (OHV) use (Lee and Boutin 2006; Pigeon et al. 2016). OHV use has been linked with delayed regeneration of seismic lines due to recurrent damage to vegetation and increasing soil compaction. This effectively creates a positive feedback loop whereby seismic lines with low vegetation height facilitate OHV use, and high OHV use further impedes regrowth of vegetation (Pigeon et al. 2016). Lee and Boutin (2006) showed that after 35 years, 65% of seismic lines investigated remained clear of woody vegetation, and in north-eastern Alberta, in wet areas, one-third of seismic lines failed to regenerate to 3 m even 50 years after disturbance (van Rensen et al. 2015).
Seismic lines affect wildlife by altering migration routes (Sawyer et al. 2009), movement behavior (Latham et al. 2011; Dickie et al. 2017a; Finnegan et al. 2018a), and habitat use patterns (Tigner et al. 2015; Scrafford et al. 2017). Of particular concern is the effect of seismic lines on threatened and endangered woodland caribou populations (Rangifer tarandus caribou, COSEWIC 2011, 2014). Seismic lines increase forage preferred by ungulates such as moose (Alces alces) and white-tailed deer (Odocoileus virginianus) (Kemper and Macdonald 2009; Finnegan et al. 2018b), leading to increased ungulate biomass within caribou ranges and to more predators such as wolves (Fuller et al. 2003). As a result, seismic lines increase caribou predation risk (James and Stuart-Smith 2002; DeCesare et al. 2012) causing functional habitat loss for caribou (Dyer et al. 2002) by attracting predators and facilitating predator movement (Latham et al. 2011; Dickie et al. 2017a; Finnegan et al. 2018a). Seismic lines with low vegetation regeneration can increase caribou visibility to wolves and also increase wolf movement rates, exacerbating predation risk (Kansas et al. 2015; Dickie et al. 2017a; Finnegan et al. 2018a). Ultimately, seismic lines contribute to wide-spread caribou population declines through apparent competition (DeCesare et al. 2012; Hervieux et al. 2013). Consequently, habitat restoration has been identified as a key management tool to stabilize and recover declining caribou populations (Environment Canada 2012; Ray 2014). Active restoration of seismic lines to improve caribou habitat quality is required under the federal recovery strategy (Environment Canada 2012). However, prioritization of restoration efforts is necessary due to the high density of seismic lines, as treatment costs range from $8000/km to $17,000/km depending on the mitigation activity selected (Pyper et al. 2014).
Current recommendations for seismic line recovery are to prioritize those with the lowest vegetation regeneration to reduce the negative impacts of seismic lines to caribou by wolves (Kansas et al. 2015; Dickie et al. 2017a; Dabros et al. 2018). Since motorized activity contributes to delayed vegetation regrowth and could limit the effectiveness of recovery efforts, our objective was to produce predictive models of motorized activity on seismic lines using field-based observations of activity and variables derived from a Geographic Information System (GIS) to help prioritize restoration efforts. We then used these relationships to map levels of motorized activity across three landscapes in Alberta, Canada. Prioritizing habitat for restoration to benefit caribou is complex, and requires a strategic approach that considers biological and economic factors (Dickie et al. 2017b; Hebblewhite 2017; Schneider et al. 2010). Therefore, to create flexible and user-friendly results, we focused on creating a spatial layer of motorized human use that could be used to inform restoration efforts as a complement to other restoration priorities considered by land managers. We developed five hypotheses to explain observed motorized activity levels on seismic lines based on a literature review. The first hypothesis predicted that motorized activity levels were related to (i) ease of travel on seismic lines (Pigeon et al. 2016), whereby dry seismic lines with reduced vegetation heights and moderate slopes would be associated with higher levels of motorized activity. The (ii) recreation hypothesis predicted that motorized activity was related to factors associated with the ease of travel hypothesis as well as distance to campsites and seismic line density. The (iii) hunting hypothesis predicted that motorized activity would be associated with ungulate abundance in addition to factors related to ease of travel and recreation. The (iv) industry hypothesis proposed that motorized activity would be most strongly associated with areas with forestry and hydrocarbon production. Finally, the (v) global model proposed that motorized activity was associated with factors from all previous hypotheses. Identifying seismic lines with high OHV use that will likely require active restoration and mitigation actions could help to direct restoration efforts for caribou. Dialog with user groups to reduce OHV use or to decide on a zonation approach, combined with additional spatial layers (e.g., caribou predation risk, alternate prey) would be valuable as a way to reduce the time and cost required to achieve caribou recovery.
Methods
Study Area
We examined motorized activity levels on three distinct landscapes with different levels of motorized activity and seismic line densities. The foothills-east (54° 23′N, 119° 30′W) and foothills-west (54° 3′N, 119° 5′W) landscapes were located in the foothills region of west-central Alberta, and the northern-boreal (57° 25′N, 119° 8′W) landscape was located in the boreal region of northwestern Alberta (Fig. S1). The foothills region is characterized by lodgepole pine (Pinus contorta) and mixedwood forests dominated by aspen (Populous tremuloides), balsam poplar (Populous balsamifera), and white birch (Betula papyrifera), with white spruce (Picea glauca) and black spruce (Picea mariana; Natural Regions Committee 2006). Elevations in this region range from 700 to 1700 m. In contrast, elevations in the boreal region range from 150 to 1100 m and the region is a mosaic of upland forests and low-lying wetlands. Upland forests are dominated by aspen, balsam poplar, white spruce, and jack pine (Pinus banksiana), whereas the low-lying wetlands are black spruce interspersed with shrubby fens and sedge meadows (Natural Regions Committee 2006).
The foothills-east landscape is 4557 km2 and consists of the Little Smoky and A la Peche caribou ranges east of Willmore Wilderness Park. This landscape has an average seismic line density of 2.56 km/km2 (range: 0–11.48 km/km2). The foothills-west landscape is 3940 km2 and consists of the Narraway and Redrock-Prairie Creek caribou ranges east of the British Columbia border and Kakwa Wildland Provincial Park. The foothills-west landscape has an average seismic line density of 0.97 km/km2 (range: 0–8.15 km/km2). The northern-boreal landscape is 17,466 km2 and encompasses the Chinchaga caribou range and the average seismic line density is 3.57 km/km2 (range: 0–21.90 km/km2). All caribou populations within the study area exhibited a declining population trend (Hervieux et al. 2013).
Field Data Collection
We subset seismic lines that intersected roads for field visits in each landscape with a random number generator in ArcGIS 10.2.2 (ESRI 2013). All seismic lines intersect roads via the network of seismic lines; respectively, 76, 79, 26% of seismic lines in the foothills-west, foothills-east, and northern landscapes are within 1 km of a road. We used 1:20,000 base map data (roads, campsites, and seismic lines; 10 m accuracy) provided by the Government of Alberta (GoA) under the Alberta Open Government License (November 2014; http://data.alberta.ca/licence). We recorded the level of motorized activity at each field site on the foothills landscapes between June and October 2013–2016, and on the northern-boreal landscape between June and October 2015. On each seismic line, we recorded information at one, and up to three subplots located 0, 100, and 500 m from the road intersection. Less than three subplots were completed only if the seismic line was truncated due to a forest harvest or another road. We did not sample candidate sites where seismic lines had been altered or removed due to forestry or restoration activities (approximately 1% of seismic lines in the foothills-east landscape had received restoration treatment).
At each subplot we examined the immediate area (10 m2) for evidence of motorized activity. We defined two levels of motorized activity: low (e.g., no evidence of OHV activity, no recently flattened vegetation by OHV tires or flagging tape, and no clear sign of ongoing vehicular traffic) and high (e.g., visible OHV tracks or heavy traffic indicated by deep tire/track ruts) (Pigeon et al. 2016). Each subplot was visited once to maximize sampling coverage of the landscapes. Although evidence of low human use on the landscape would not persist for long, evidence for high human use of seismic lines (e.g., ruts) persist across long time periods; we were interested in this general use over long time periods. Therefore, as our analysis only used two levels of use (low vs. high; see section “Data analysis, model evaluation, and predictive mapping”), we were confident that high and low OHV levels would not vary across the sampling period and that a single visit to each plot would be sufficient to quantify levels of OHV use.
Environmental Data
To address our hypotheses, we extracted seismic line attributes: topography, land cover, anthropogenic disturbance, and ungulate abundance. We averaged variables assessed at each subplot (0, 100, 500 m) across each seismic line (i.e., site) to avoid spatial autocorrelation. Because motorized activity was inconsistent across subplots for 10% of sites, the highest level of activity was applied across all subplots within each site when necessary. We divided the seismic line footprint across our three landscapes into 100 m segments. We then used Light Detection and Ranging (LiDAR) data (1 m × 1 m resolution) collected between 2003 and 2008 by the GoA to calculate mean vegetation height (VegHT, m) of these 100 m line segments (Dickie et al. 2017b). We also calculated mean depth to water (DTW, m) under each of the 100 m line segments using LiDAR-derived wet areas mapping (White et al. 2012; Dickie et al. 2017b).
Considering topography and land cover, we used a 30 m × 30 m digital elevation grid to extract values of slope (°) and elevation (m; Table S1), which were averaged over 100 m segments. We assessed land cover and anthropogenic disturbance across a range of scales by buffering subplots by 125, 250, 500, 1250, and 2500 m. On the foothills landscapes, we used a 10-class composite land cover map (Franklin et al. 2002) based on Landsat thematic mapper and a Digital Elevation Model, which was updated in 2014 with the most recent available high-resolution imagery to match disturbance and land cover. This composite land cover map allowed us to update land cover types yearly based on new disturbances; re-classifying new disturbances as the “barren” land cover type after disturbance (Franklin et al. 2002). Although the barren land cover type was not directly used in our analysis, reclassifying new disturbances as barren land cover reduced the overestimation of other land cover types. We calculated the percentage of upland land cover categories (UpTrees and Herb; areas with dry and mesic moisture regimes), and lowland land cover categories (WetTrees and WetOpen; with wet and aquatic moisture regimes) within each buffer size surrounding each subplot (Table S1). On the northern boreal landscape, we used the same process to calculate percentage of upland and lowland land cover, but using an analogous 13-class land cover map based on Landsat thematic mapper, a Digital Elevation Model, and Airborne laser scanning that employed a decision tree for classification (Nijland et al. 2015).
To calculate anthropogenic disturbance at each subplot, we measured distance along roads to the nearest access road intersection (access roads defined as: all primary paved and gravel 1-lane and 2-lane roads), recreational campsite (CampDist, km), and forest cutblocks (≤15 years old in 2014 as reported in the Alberta Vegetation Inventory Post Inventory, forest cutblocks provided by the GoA; CutblockDist, km) using a least-cost path tool developed in ArcGIS 10.2.2. For each subplot, we also calculated the number of well sites, pipelines (PipelineDens; km/km2), and seismic lines (SeismicDens; km/km2) within each buffer size. Well sites and pipeline data were provided by GOA partnerships. Forest cutblock data were provided by provincial Forest Management Agreement holders who had operations within the study area.
Finally, on the foothills landscapes, we estimated abundance of ungulates which can be legally hunted based on count models developed using aerial survey data obtained from the GoA (methods are described in detail in Nielsen et al. 2017). Grid counts (approximately 5 km × 10 km cells) were converted to rasters. The values included in the analysis are therefore based on the amount of each grid cell within each buffer. Because these aerial data were not available for the northern boreal landscape, we used the Alberta Biodiversity Monitoring Institute’s (ABMI) predicted relative abundance under current conditions for ungulate species based on presence-absence data from winter track counts (ABMI 2016). We extracted all variables associated with seismic line attributes that intersected subplots using ArcGIS 10.2.2 (ESRI 2013).
Data Analysis, Model Evaluation, and Predictive Mapping
We used logistic regression to model the relationship between low and high levels of motorized activity and variables associated with each of our hypotheses using the base package in R (R Core Team 2015; Table S1). To facilitate model evaluation, we split the data for each landscape into training (85% of sites) and testing (15% of sites) datasets. For model evaluation within the foothills study area, we also sampled 28 additional subplots on seismic lines at distances of 1000 m from the road (500 m from the nearest subplot).
Before fitting logistic regression models, we carried out data exploration following methods outlined in Zuur et al. (2010). We did not include explanatory variables with Pearson’s correlation coefficient >0.65 in the same model. We also assessed multicollinearity within hypothesis-driven models using variance inflation factors (VIF) and removed explanatory variables with VIF greater than 3 (Zuur et al. 2010). In addition, we examined the potential effect of recorder bias in our models a priori by fitting a global model to each landscape and including recorder ID as a categorical variable. There was no effect of recorder ID on the models, so we removed it from the final analysis.
We used the receiver operating criterion (ROC) to measure area under the curve (AUC; Bonn and Schroder 2001) and determine model performance in conjunction with k-fold cross-validation in the R package “caret” (Kuhn 2015). AUC is a threshold-independent approach to evaluate model fit, where models with AUC >0.6 are considered plausible and AUC >0.7 indicates good model fit (Fielding 2002). We considered models with k-fold cross-validation AUC scores >0.6 as having sufficient support. We then used Akaike’s Information Criterion (AIC) to compare competing models remaining within the selection set and used the highest Akaike weight (ω) and lowest AIC to determine which model had the most support (Burnham and Anderson 2002). We considered models with AIC >2 relative to the next closest model to have substantial support for the top model; conversely, when alternative models were AIC <2, we considered relatively equal support among those models (Burnham and Anderson 2002). We evaluated the fit of candidate models using McFadden’s-R2 (McFadden 1974).
Because our goal was to maximize the predictive ability and parsimony of our models, we removed uninformative variables from the most supported model for each landscape (Arnold 2010). We used backwards stepwise removal procedures to sequentially delete the least important covariate (as identified by the minimal absolute value of the coefficient/standard error; Pagano and Arnold 2009). If eliminating a covariate led to a reduction in AIC (or had no effect on AIC), we discarded it from the model. We continued this approach until no additional covariate could be eliminated without leading to an increase in AIC (Pagano and Arnold 2009). We compared the predictive ability of the original top model (with all variables) to the parsimonious model using k-fold AUC to ensure that predictive ability was not traded for parsimony. We report final results as odds ratios (OR) for statistically significant variables (p < 0.05) retained in the parsimonious model.
For model evaluation, we used the testing datasets from each landscape to tune a ROC threshold by balancing the error rate between false positive and false negative predictions (Bonn and Schroder 2001). We used this ROC threshold to evaluate the correct classification rate of the testing and training datasets. We also reported the model sensitivity, which is the conditional probability that any given case is correctly classified using the ROC threshold. Finally, we created predictive maps of motorized activity on 100 m segments of all seismic lines using the coefficients from the parsimonious models for each landscape. We used the landscape-dependent ROC threshold to predict the level of motorized activity on each seismic line segment.
Results
Sampling intensity (number of sites visited) differed across the three landscapes. Still, the distribution of motorized activity between areas was comparable: respectively, we observed 10, 16, and 15% of sites with high levels of motorized activity within the foothills-east (n = 242), foothills-west (n = 88), and northern-boreal landscapes (n = 92). Based on AIC, we determined the most parsimonious buffer size around subplots to measure landscape-level variables (e.g., land cover and anthropogenic disturbance). Fitting global models with varying buffer sizes indicated that in the northern landscape and the foothills-west landscape, the 1250 m buffer size was most parsimonious for our analyses. In the foothills-east landscape, the 1250 and 2500 m buffer sizes yielded equivalent model fit (change in AIC <2) and for consistency we therefore selected the 1250 m scale for all landscapes (Table S2).
In the foothills-east landscape, there were three competing hypotheses with a k-fold cross-validation AUC >0.6 (Table S3A). Model selection revealed that the global model best explained motorized activity levels (McFadden’s-R2 = 0.12). Due to issues of multicollinearity, only 10 of 15 potential variables were included in this global model (Tables S3A and S4). After removal of uninformative variables, the most parsimonious model for the foothills-east landscape indicated that the probability of high levels of motorized activity decreased with increasing vegetation height on seismic lines and with the proportion of treed wetland and herb land cover classes. The model also indicated that the probability of motorized activity increased with increasing distance to forest cutblocks (Table 1A; Fig. 1). The odds of observing high levels of motorized activity were 58% less likely (OR 0.42) with each meter increase in vegetation height on seismic lines, and were 45% and 40% less likely (OR 0.55 and 0.60, respectively) with each 1% increase in treed wetland and herb land cover classes surrounding seismic lines, respectively. High levels of motorized activity were also 71% more likely (OR 1.71) with every 1 km increase in distance to forest cutblocks (Table 1A).

Probability of high motorized activity levels on seismic lines in the foothills-east landscape in relation to a vegetation height measured using LiDAR, b proportion of treed wetland land cover, c proportion of herb land cover, and d distance to forest cutblock, modeled using logistic regression of motorized activity levels collected in western Alberta, Canada, from June to October 2013–2016 (Table 1A)
On the foothills-west landscape, all models except the industry model were considered plausible. Of these, AIC weights suggested that the hunting model (with seven variables) was the most supported model and McFadden’s-R2 was 0.51 (Table S3B). In this landscape, the most parsimonious model indicated that the probability of motorized activity increased with increasing distance to roads, and decreased with increasing slope, vegetation height on seismic lines, distance to campsites, seismic line densities, and white-tailed deer grid counts (Table 1B; Fig. 2). Although confidence intervals for vegetation height of seismic lines and distance to campsites variables overlapped zero, we retained these variables in the parsimonious model because their removal reduced the model’s predictive ability (decrease in AUC from 0.74 to 0.65), and removing them increased the AIC by 3.3. The odds of observing high levels of motorized activity were 86% less likely (OR 0.14) with every 1° increase in slope, 72% less likely (OR 0.28) with every 1 km/km2 increase in seismic line density, and 99% less likely (OR 0.01) with every one unit increase in white-tailed deer counts. The odds of a high level of motorized activity were also 343% more likely (OR 4.43) with every 1 km increase in distance to access roads (Table 1B). However, the confidence interval for the white-tailed deer OR included zero, and for distance to access road was wide.

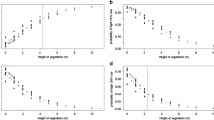
Probability of high motorized activity levels on seismic lines in the foothills-west landscape in relation to a slope, b vegetation height measured using LiDAR, c distance to campsite, d distance to access road, e seismic line density, and f white-tailed deer counts modeled using logistic regression of motorized activity collected in western Alberta, Canada, from June to October 2013–2016 (Table 1B)
On the northern-boreal landscape, only the global model had a cross-validation AUC value greater than 0.6. This model had seven variables after the multicollinearity assessment (Table S4) and McFadden’s-R2 was 0.33. After stepwise removal of uninformative variables, the most parsimonious model for the northern-boreal landscape indicated that probability of high levels of motorized activity increased with increasing herb land cover, distance to forest cutblock, and pipeline density and decreased with increasing distance to roads. However, only the proportion of herbaceous land cover did not overlap zero (Fig. 3). The odds of observing a high level of motorized activity was 150% more likely (OR 2.5) with every 1% increase in herbaceous land cover (Table 1C).

Probability of high motorized activity levels on seismic lines in the northern-boreal landscape in relation to a pipeline density, b proportion of herb land cover, c distance to access road, and d distance to cut block modeled using logistic regression of motorized activity collected in western Alberta, Canada, from June to October 2013–2016 (Table 1C)
Model Evaluation and Mapping
The foothills-east testing dataset consisted of 49 sites (including nine 1000 m subplots), of which 8 had high levels of motorized activity. Using the testing dataset, the AUC was 0.66 and sensitivity was 0.62 (Table S5). This model correctly classified 71 and 63% of testing dataset sites to the levels of high and low motorized activity, respectively (Table S6). The foothills-west testing dataset consisted of 22 sites (including eight 1000 m subplots), 8 of which had a high level of motorized activity. The AUC was 0.74 and sensitivity was 0.75. This model correctly classified 72% of low activity and 75% of high activity sites (Table S6). The northern-boreal testing dataset consisted of 17 sites including 6 with high levels of motorized activity. The AUC was 0.61 and sensitivity was 0.83. This model correctly classified 55% of low activity and 66% of the high activity sites on 15% of the data reserved for model testing. These results were consistent with the prediction of the model development dataset (Table S6).
Using the thresholds established by the ROC analysis to differentiate between predicted levels of motorized activity (Table S6), we applied our models for each respective landscape to create predictive maps of motorized activity on seismic lines. We identified 28% (21,777 km) of seismic lines across the three landscapes with a high probability of high motorized activity levels. The proportion of lines with a high probability of high motorized activity levels varied across landscapes with 35% (4,147 km), 49% (1886 km), and 25% (15,743 km) of seismic lines in the foothills-east, foothills-west, and northern-boreal landscapes, respectively (Fig. 4).

Predicted probability of a high level of motorized activity on seismic lines (see Table 1) on a the northern-boreal landscape and b the foothills-east and foothills-west landscapes logistic regression of motorized activity levels collected in western Alberta, Canada, from June to October 2013–2016
Discussion
We created predictive maps assessing the probability of a high level of motorized activity on seismic lines across three landscapes with varying amounts of industrial activity in Alberta, Canada. Our results suggest that drivers of motorized activity are localized and landscape-specific. In the foothills-east and northern-boreal landscapes where disturbance levels were relatively higher, the global hypothesis had the most support. Global models in these landscapes included elements from the travel and industry hypotheses; however, each region also had landscape-specific predictors. In the foothills-west landscape where disturbance was lowest, motorized activity levels were better explained by the hunting model. The differences in the foothills-east and foothills-west landscapes, with a distance of 100 km between them, demonstrates that there are localized differences in human activity on seismic lines in adjacent landscapes. In general, our results demonstrated that motorized activity levels were dependent on a variety of environmental and human use factors related to vegetation height, soil wetness, and accessibility, but that no one predictor was important on all three landscapes. To our knowledge, our study is the first to create maps depicting levels of motorized activity on seismic lines using GIS-based variables. These predictions of motorized activity levels are an important component of seismic line restoration planning and can be used as a tool in conjunction with management priorities to identify and target recovery efforts.
Recent studies directly addressing the natural regeneration of seismic lines and the impacts of ongoing OHV use have suggested that active restoration efforts (e.g., tree planting and line blocking) are required to reach pre-disturbance states (Lee and Boutin 2006; van Rensen et al. 2015). It is widely accepted that continual OHV use impedes natural recovery of vegetation (Lee and Boutin 2006; Pierskalla et al. 2011; van Rensen et al. 2015), which perpetuates OHV use on seismic lines with low vegetative growth creating a positive feedback loop (Pigeon et al. 2016). However, the detrimental effects of motorized activities on seismic line regeneration have not been directly assessed. To our knowledge, our models are the first spatially explicit models that can be used to identify specific seismic lines (21,777 km; 28%) where mitigation efforts may be needed to reduce motorized activities on seismic lines increasing the potential for successful recovery via restoration treatments. For caribou conservation, focusing efforts on seismic lines where natural regeneration is low and limited vegetation regrowth permits travel and hunting by wolves (Kansas et al. 2015; Dickie et al. 2017a) may benefit caribou by reducing predation risk (DeCesare et al. 2012).
On the foothills-west landscape, we found that seismic lines with low vegetation height that occurred in areas with low slopes, fewer white-tailed deer, and low seismic line density were likely to have high level of motorized activity. Additionally, seismic lines further from roads and closer to campsites were also associated with a high level of motorized activity. In this landscape, campsites were mostly located around the exterior landscape boundary while access roads penetrated the interior, suggesting that a high level of motorized activity is most common on seismic lines where overall seismic density is low and where accessibility (i.e., roads) is otherwise low (Fig. S2). In contrast, on the foothills-east landscape, seismic lines farther from recent forest cutblocks, with low vegetation heights, and in areas with less treed wetland and herbaceous land covers were more likely to have high level of motorized activity. However, this model explained much less variation in the dataset (McFadden’s-R2 0.12 vs. 0.51 on foothills-east vs. foothills-west), and we therefore recommend interpreting the results of the foothills-east landscape with caution. The density of seismic lines was 70% less within the foothills-west landscape compared to the foothills-east landscape, and this contrast in density could explain why motorized activity patterns were different in these two adjacent landscapes.
On the northern-boreal landscape, seismic lines in areas with a high percentage of herbaceous land cover were more likely to have a high level of motorized activity. The probability of high motorized activity levels also increased with pipeline density, and it is likely that pipelines could be used to increase accessibility for OHVs. The northern-boreal landscape has a low human population density, is far from regional centers, and consists of extensive fens and bogs. Because of this, and because of the high densities of seismic lines in the area, any one seismic line may be less frequently used for OHV use than in the foothills region where the densities of seismic lines are lower and the human population density is higher (Scrafford et al. 2017). Reduced activity in the northern landscape may explain why the model was relatively weak at correctly classifying the low activity testing seismic lines. Sampling was limited on this landscape and predictive models would benefit from additional data collection proportional to the density of seismic lines.
Using GIS-based variables, our results were consistent with previous field-based studies, whereby vegetation height, soil wetness, and slope was associated with less motorized vehicle activity to varying degrees across the landscapes. Pigeon et al. (2016) used field-based vegetation height data in the foothills-east landscape and demonstrated a strong relationship between vegetation height and motorized activity levels. While our results using GIS data suggest a weaker relationship between vegetation height and motorized activity levels, this could be due in part, to the temporal mismatch in data. The LiDAR data used to determine vegetation height for this study was collected between 2003 and 2008, while we measured motorized activity a decade later (2013–2016). This mismatch demonstrates the benefit of having a combination of field and GIS-based data types. Future studies may be better able to integrate both data types by verifying LiDAR data with field observations of vegetation height to improve model prediction. However, while we recognize that field-based measurements of vegetation height can be readily collected, using vegetation height-based models to predict across a broad landscape would require more recent LiDAR data than are available within our study area (circa 2007).
Given the variation in the predictor variables that were retained across the three landscapes, we caution against applying our predictive models to new areas without some measure of re-parameterization or model validation. However, we have shown that with the relatively low cost of site visits, predictive maps of motorized activity levels can be created and applied to a broader landscape to prioritize the restoration of seismic lines to assist in caribou habitat recovery. Although costly, the availability of updated LiDAR-derived vegetation height data could greatly improve model performance and potentially guide restoration efforts. Winter activity on seismic lines was beyond the scope of this study; however, future research should consider the effect of seasonality on motorized activity use, as low-lying areas may be more accessible when frozen. In addition, our models only consider seismic lines, but other disturbances also contribute to the anthropogenic footprint, including forest cutblocks, pipelines, well sites, roads, power lines, and railways (Schneider et al. 2003; Latham and Boutin 2015; Government of Alberta 2017). The federal caribou recovery strategy requires caribou ranges to have a minimum of 65% undisturbed habitat to achieve a 60% probability of maintaining a self-sustaining caribou population (Environment Canada 2012, 2014). The herd ranges covered by the landscapes in this study range from 5 to 44% undisturbed and restoration of seismic lines has been identified as a key element in reducing the disturbance footprint for caribou habitat in Alberta (Government of Alberta 2016). Ray (2014) recommended that restoration efforts should use a regional approach that considers cumulative disturbance on the landscape, and assesses priorities based on cost and net gains to habitat and connectivity. Ecologically, restoring seismic lines has the potential to effectively reduce predation risk for caribou by reducing the attractive browse, spatial overlap among alternate prey (i.e., moose, deer, and elk), caribou, and their predators, and by increasing vegetation height to limit predator movement (Dickie et al. 2017b; Finnegan et al. 2018a), restoring seismic lines has the potential to reduce predation risk for caribou (DeCesare et al. 2012). Additionally, the benefits of seismic line restoration extend beyond any single species-at-risk because reducing fragmentation will also improve biodiversity (Venier et al. 2014). Our models could therefore be integrated with existing information on species habitat requirements (e.g., caribou) to consider cumulative disturbance and further prioritize efforts to recover species while maximizing cost efficacy and ecological benefits associated with restoration.
Management Implications
Active restoration on seismic lines is necessary to achieve vegetation structure comparable to the structure of the surrounding forest, a criterion in successful habitat restoration under the federal recovery strategy for caribou (Environment Canada 2012). However, active seismic line restoration is costly and with over 77,000 km of seismic lines within our study area alone, a prioritization approach is required. There is a correlation between high levels of motorized activity and slow, natural regeneration of vegetation on seismic lines (Lee and Boutin 2006; Pigeon et al. 2016). It is necessary to prioritize regeneration on seismic lines with high levels of human activity because they may otherwise persist on the landscape for >50 years, whereas lower use areas are more likely to regenerate naturally. While human activity on seismic lines is not likely to cease entirely, reducing the number of seismic lines with high human activity while directing OHV users to a designated trail system is one option to balance human access and ecosystem recovery.
Our predictive maps identified 21,777 km of seismic lines where high levels of motorized activity may have impeded the natural recovery of vegetation; targeting those seismic lines for reclamation could increase the cost efficiency of restoration efforts. To further focus reclamation efforts and maximize the benefits of seismic line restoration efforts for caribou, these maps could be integrated with additional spatial products (e.g., maps of caribou habitat quality and predation risk), while also considering the cumulative and interactive effects of restoration and other disturbances such as roads and forest cutblocks on ecosystem function for caribou.
References
ABMI (2016) ABMI species website, version 3.2. http://species.abmi.ca/pages/species/mammals. Accessed 18 March 2016
Arnold TW (2010) Uninformative parameters and model selection using Akaike’s information criterion. J Wildl Manag 74:1175–1178. https://doi.org/10.2193/2009-367
Bonn A, Schroder B (2001) Habitat models and their transfer for single and multi species groups: a case study of carabids in an alluvial forest. Ecography 24:483–496. https://doi.org/10.1034/j.1600-0587.2001.d01-204.x
Burnham KP, Anderson DR (2002) Model selection and multimodel inference. Springer, New York, NY
COSEWIC (2014) COSEWIC assessment and status report on the caribou (Rangifer tarandus) in Canada. Environment Canada, Ottawa, ON
COSEWIC (2011) Designatable units for caribou (Rangifer tarandus) in Canada. Environment Canada, Ottawa, ON, p 88
Dabros A, Pyper M, Castilla G (2018) Seismic lines in the boreal and arctic ecosystems of North America: environmental impacts, challenges and opportunities. Environ Rev. https://doi.org/10.1139/er-2017-0080
DeCesare NJ, Hebblewhite M, Schmiegelow F, Hervieux D, McDermid GJ, Neufeld L, Bradley M, Whittington J, Smith KG, Morgantini LE, Wheatley M, Musiani M (2012) Transcending scale dependence in identifying habitat with resource selection functions. Ecol Appl 22:1068–1083
Dickie M, Serrouya R, McNay RS, Boutin S (2017a) Faster and farther: wolf movement on linear features and implications for hunting behaviour. J Appl Ecol 54:253–263. https://doi.org/10.1111/1365-2664.12732
Dickie M, Serrouya R, DeMars C, Cranston J, Boutin S (2017b) Evaluating functional recovery of habitat for threatened woodland caribou. Ecosphere 9:e01936. https://doi.org/10.1002/ecs2.1936
Dyer SJ, Neill JPO, Wasel SM, Boutin S (2002) Quantifying barrier effects of roads and seismic lines on movements of female woodland caribou in northeastern Alberta. Can J Zool 80:839–845. https://doi.org/10.1139/Z02-060
Environment Canada (2014) Recovery strategy for the woodland caribou, southern mountain population (Rangifer tarandus caribou) in Canada. Environment Canada, Ottawa, ON
Environment Canada (2012) Recovery strategy for the woodland caribou (Rangifer tarandus caribou), boreal population, in Canada. Species at risk act recovery strategy series. Environment Canada, Ottawa, ON
ESRI (2013) ArcGIS desktop: release 10.2.2. ESRI, Redlands, CA
Fielding AH (2002) Modeling tools and accuracy assessment. In: Scott JM, Heglund PJ, Morrison ML, Haufler JB, Raphael MG, Wall WA, Samson FB (eds) Predicting species occurrences: issues of accuracy and scale. Island Press, Washington, DC, pp 265–270
Finnegan L, MacNearney D, Pigeon KE (2018b) Divergent patterns of understory forage growth after seismic line exploration: Implications for caribou habitat restoration. For Ecol Manag 409:634–652. https://doi.org/10.1016/j.foreco.2017.12.010
Finnegan L, Pigeon KE, Cranston J, Hebblewhite M, Musiani M, Neufeld L, Schmiegelow F, Duval J, Stenhouse GB (2018a) Natural regeneration on seismic lines influences movement behaviour of wolves and grizzly bears. PLoS ONE. https://doi.org/10.1371/journal.pone.0195480
Fiori SM, Zalba SM (2003) Potential impacts of petroleum exploration and exploitation on biodiversity in a Patagonian nature reserve, Argentina. Biodivers Conserv 12:1261–1270. https://doi.org/10.1023/A:1023091922825
Franklin SE, Peddle S, Dechka J, Stenhouse G (2002) Evidential reasoning with Landsat TM, DEM and GIS data for landcover classification in support of grizzly bear habitat mapping. Int J Remote Sens 23:4633–4652
Fuller TK, Mech LD, Cochrane JF (2003) Wolf population dynamics. In: Mech LD, Boitani L (eds) Wolves: behavior, ecology and conservation. University of Chicago Press, Chicago, IL, pp 161–191
Government of Alberta (2016) Little Smoky and A La Peche caribou range plan (draft). Government of Alberta, Edmonton, AB
Government of Alberta (2017) Provincial woodland caribou range plan (draft). Government of Alberta, Edmonton, AB
Hebblewhite M (2017) Billion dollar boreal woodland caribou and the biodiveristy impacts of the global oil and gas industry. Biol Conserv 206:102–111
Hervieux D, Hebblewhite M, DeCesare NJ, Russell M, Smith K, Robertson S, Boutin S (2013) Widespread declines in woodland caribou (Rangifer tarandus caribou) continue in Alberta. Can J Zool 91:872–882. https://doi.org/10.1139/cjz-2013-0123
James A, Stuart-Smith A (2002) Distribution of caribou and wolves in relation to linear corridors J Wildl Manag 64:154–159. https://doi.org/10.2307/3802985
Joroenson JC, Ver Hoef JM, Jorgenson MT (2010) Long-term recovery patterns of arctic tundra after winter seismic exploration. Ecol Appl 20:205–221. https://doi.org/10.1890/08-1856.1
Kansas JL, Charlebois ML, Skatter HG (2015) Vegetation recovery on low impact seismic lines in Alberta’s oil sands and visual obstruction of wolves (Canis lupus) and woodland caribou (Rangifer tarandus caribou). Can Wildl Biol Manag 4-2:137–149
Kemper JT, Macdonald SE (2009) Directional change in upland tundra plant communities 20–30 years after seismic exploration in the Canadian low-arctic. J Veg Sci 20:557–567
Komers PE, Stanojevic Z (2013) Rates of disturbance vary by data resolution: Implications for conservation schedules using the Alberta Boreal Forest as a case study. Glob Chang Biol 19:2916–2928. https://doi.org/10.1111/gcb.12266
Kuhn M (2015) Package ‘caret’. http://caret.r-forge.r-project.org/
Latham ADM, Boutin S (2015) Impacts of utility and other industrial linear corridors on wildlife. In: van der Ree R, Smith DJ, Grilo C (eds) Handbook of road ecology. Wiley, Oxford, pp 228–236
Latham ADM, Latham MC, Boyce MS, Boutin S (2011) Movement responses by wolves to industrial linear features and their effect on woodland caribou in northeastern alberta. Ecol Appl 21:2854–2865. https://doi.org/10.1890/11-0666.1
Lee P, Boutin S (2006) Persistence and developmental transition of wide seismic lines in the western Boreal Plains of Canada. J Environ Manag 78:240–250. https://doi.org/10.1016/j.jenvman.2005.03.016
McFadden D (1974) Conditional logit analysis of qualitative choice behavior. Front Econom 1:105–142. https://doi.org/10.1108/eb028592
National Energy Board (2016) Crude oil and petroleum products. https://www.neb-one.gc.ca/nrg/sttstc/crdlndptrlmprdct/index-eng.html
Natural Regions Committee (2006) Natural regions and subregions of Alberta. Compiled by D.J. Downing and W.W. Pettapiece. Government of Alberta. Pub. No. T/852
Nielsen SE, Larsen TA, Stenhouse GB, Coogan SCP (2017) Complementary food resources of carnivory and frugivory affect local abundance of an omnivorous carnivore. Oikos 126:369–380. https://doi.org/10.1111/oik.03144
Nijland W, Coops NC, Nielsen SE, Stenhouse G (2015) Integrating optical satellite data and airborne laser scanning in habitat classification for wildlife management. Int J Appl Earth Obs Geoinf 38:242–250. https://doi.org/10.1016/j.jag.2014.12.004
Noss R, Nielsen S, Vance-Borland K (2009) Prioritizing ecosystems, species, and sites for restoration. In: Moilanen A, Wilson KA, Possingham H (eds) Spatial conservation prioritization: quantitative methods and computational tools. Oxford University Press, London, pp 158–171
Pagano AM, Arnold TW (2009) Detection probabilities for ground-based breeding waterfowl surveys. J Wildl Manag 73:392–398. https://doi.org/10.2193/2007-411
Pigeon KE, Anderson M, MacNearney D, Cranston J, Stenhouse G, Finnegan L (2016) Toward the restoration of caribou habitat: understanding factors associated with human motorized use of legacy seismic lines. Environ Manag 58:821–832. https://doi.org/10.1007/s00267-016-0763-6
Pierskalla CD, Schuett MA, Thompson KA (2011) Management perceptions of off-highway vehicle use on national forest system lands in Appalachia. North J Appl For 28:208–213
Pyper M, Nishi J, McNeil L (2014) Linear feature resotration in caribou habitat: a summary of current practices and a roadmap for future progreams. Technical Report, Canada’s Oils Sails Innovation Alliances, Calgary, AB
R Core Team (2015) R: a language and environment for statistical computing. R Found Stat Comput. https://doi.org/10.1007/978-3-540-74686-7
Ray J (2014) Defining habitat restoration for boreal caribou in the context of national recovery: a discussion paper. Prepared for Environment Canada. https://www.registrelep-sararegistry.gc.ca/default.asp?lang=En&n=90C9755C-1
Sawyer H, Kauffman MJ, Nielson RM, Horne JS (2009) Identifying and prioritizing ungulate migration routes for landscape-level conservation. Ecol Appl 19:2016–2025. https://doi.org/10.1890/08-2034.1
Schneider RR, Stelfox JB, Boutin S, Wasel S (2003) Managing the cumulative impacts of land uses in the western Canadian sedimentary basin: a modeling approach. Conserv Ecol 7:8
Schneider RR, Hauer G, Adamowicz WL, (Vic) Boutin S (2010) Triage for conserving populations of threatened species: the case of woodland caribou in Alberta. Biol Conserv 143:1603–1611
Scrafford MA, Avgar T, Abercrombie B, Tigner J, Boyce MS (2017) Wolverine habitat selection in response to anthropogenic disturbance in the western Canadian boreal forest. For Ecol Manag 395:27–36
Tigner J, Bayne EM, Boutin S (2015) American marten respond to seismic lines in northern Canada at two spatial scales. PLoS ONE 10:1–19. https://doi.org/10.1371/journal.pone.0118720
van Rensen CK, Nielsen SE, White B, Vinge T, Lieffers VJ (2015) Natural regeneration of forest vegetation on legacy seismic lines in boreal habitats in Alberta’s oil sands region. Biol Conserv 184:127–135. https://doi.org/10.1016/j.biocon.2015.01.020
Venier LA, Thompson ID, Fleming R, Malcolm J, Aubin I, Trofymow JA, Langor D, Sturrock R, Patry C, Outerbridge RO, Holmes SB, Haeussler S, Grandpré L, De, Chen HYH, Bayne E, Arsenault A, Brandt JP (2014) Effects of natural resource development on the terrestrial biodiversity of Canadian boreal forests 1. Environ Rev 490:457–490
White B,Ogilvie J, Campbell DMHH, Hiltz D, Gauthier B, Chisholm HK, Wen HK, Murphy P.N.C.C, Arp Pa (2012) Using the cartographic depth-to-water index to locate small streams and associated wet areas across landscapes. Can Water Resour J 37:347–333. https://doi.org/10.4296/cwrj2011-909
Zuur AF, Ieno EN, Elphick CS (2010) A protocol for data exploration to avoid common statistical problems. Methods Ecol Evol 1:3–14. https://doi.org/10.1111/j.2041-210X.2009.00001.x
Acknowledgements
This work was financially supported by the Alberta Upstream Petroleum Research Fund (15-ERPC-01), the Government of Canada under the National Conservation Plan (HSP6617, 6699, 7195), the Foothills Landscape Management Forum, the Forest Resource Improvement Association of Alberta (FRIP OF-13-006), the British Columbia Oil and Gas Research and Innovation Society (BC OGRIS 15-04), Alberta Environment and Parks, Canadian Natural Resources, Daishowa-Marubeni International Ltd., fRIResearch, Jupiter Resources Ltd., Manning Diversified Forest Products, Millar Western Forest Products Ltd., Paramount Resources Ltd., Talisman Energy Inc., Tolko Industries Ltd., Vanderwell Contractors Ltd., and Weyerhaeuser Co. Ltd. In-kind support was provided by Alberta Agriculture and Forestry, Alberta Environment and Parks, ANC Timber Ltd., Canfor Corporation, Daishowa-Marubeni International Ltd., Tolko Industries Ltd., West Fraser Timber Co. Ltd., and Weyerhaeuser Co. Ltd. Field data were collected by M Anderson, L Brown, F Deagle, L Dewart, J Dillon, S Fassina, J Halbert, B Knox, C Lambert, A MacDonald, K Ridley, T Vandermolen, and R Viejou. We thank the fRI Research GIS Program for additional support.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Supplementary information
Rights and permissions
About this article

Cite this article
Hornseth, M.L., Pigeon, K.E., MacNearney, D. et al. Motorized Activity on Legacy Seismic Lines: A Predictive Modeling Approach to Prioritize Restoration Efforts. Environmental Management 62, 595–607 (2018). https://doi.org/10.1007/s00267-018-1063-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00267-018-1063-0