
Abstract
The behaviour of animals is strongly influenced by the detection of cues relating to foraging opportunity or to risk, while the social environment plays a crucial role in mediating their behavioural responses. Despite this, the role of the social environment in the behaviour of non-grouping animals has received far less attention than in social species. Here, we present the results of an experiment on a cryptic species of goby (Pseudogobius sp.), which does not form social groups in its natural habitat. Gobies were presented sequentially with chemical cues relating to food, conspecific alarm and control, while in the presence of conspecifics. The intermittent locomotory behaviour of the gobies, which is typical of many cryptic animals, was influenced by the type of cues presented. Gobies decreased the duration of bouts of stasis in the presence of food cues and were generally more active. By contrast, those detecting alarm cues decreased the duration of movement bouts and were generally less active. In line with previous studies involving shoaling species, gobies in the presence of food cues adopted a more dispersed distribution, while clustering together in the presence of alarm cues. Finally, we used calculations of transfer entropy as a means of inferring information transfer among experimental subjects. In contrast to previous studies that have focused on social species, transfer entropy between gobies was detectable only in the conspecific alarm treatment. Taken together, our results show that members of this cryptic species detect and respond to chemical cues by adjusting their movement and distancing to conspecifics. Furthermore, they augment their own information with social cues but only when they perceive a threat.
Significance statement
Animals are routinely exposed to an array of cues within their environment that convey valuable information about risk and foraging opportunities and must adapt their behaviour accordingly. To facilitate this, animals often use information arising from the behaviour of conspecifics to inform their own responses; however, this has rarely been considered in species which do not exhibit strong grouping tendencies. We used a non-shoaling fish, the goby (Pseudogobius sp.), to examine both their responses to ecologically relevant cues and the effect of the social environment on these responses. The gobies adapted their distances relative to one another according to the cues present and responded most strongly to information arising from conspecifics (measured as transfer entropy) in the presence of a potential threat. This demonstrates the potential importance of social information even to species that do not live in social groups with others of their own kind.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Animal behaviour is profoundly influenced by the detection of ecologically relevant cues in the environment. In particular, cues relating to foraging opportunities, or to levels of risk, may elicit strong responses. Detection of food cues may promote active foraging behaviour, which often manifests as greater activity and changes in movement profiles as animals seek to locate the source of the cues (Schaerf et al. 2017; Hansen et al. 2020). By contrast, alarm cues may elicit more risk-averse behaviour, often characterised by decreased levels of activity (Chivers and Smith 1993; Wudkevich et al. 1997; Hazlett and Schoolmaster 1998). For prey animals, the ability to modify behaviour according to the risk of predation is integral to fitness and survival. The failure to tailor threat-sensitive behaviours to the immediate risk of predation risk can be fatal, while being overly cautious attracts opportunity costs, for instance missing out on the chance to forage (Helfman 1989; Lima and Dill 1990; Ferrari et al. 2009; Webster and Laland 2012). Thus, the ability to effectively navigate the trade-off surrounding threat-sensitive behaviours forms a central element of a prey animals’ behavioural repertoire. As such, prey animals tend to exhibit patterns of behaviour which accommodate their need to negotiate this trade-off effectively. For cryptic prey animals relying on camouflage, successful predator avoidance relies heavily on their ability to remain undetected. Previous studies have shown that camouflage alone does not form a complete cryptic strategy; cryptic animals must also moderate their movement behaviour in order to effectively avoid detection (Houtman and Dill 1994; Ioannou and Krause 2009). For this reason, these animals tend to exhibit behaviour such as intermittent movement, where bursts of movement are punctuated by periods of stillness, as this preserves the effectiveness of their camouflage while still enabling them to navigate their environment as needed (O’Brien and Evans 1991; Kramer and McLaughlin 2001). For such animals, adapting the bout lengths of movement or stasis according to external cues likely represents an adaptive strategy, for example, increasing the duration of bouts of stasis and/or decreasing the duration of movement bouts when risk is greater.
Social information, in particular, that derived from observing the behaviour of conspecifics, is a key modifier of behaviour. For example, the transmission of social information in animal groups is fundamental to the expression of coherent collective behaviour (Fernandez-Juricic and Kacelnik 2004; Ballerini et al. 2008; Wilson et al. 2019). Animals also often use social information to inform decisions regarding context-dependent changes in behaviour. Prey animals tend to adopt patterns of movement and behaviour which complement their predator aversion strategies (Humphries and Driver 1970; Bode et al. 2010; Schaerf et al. 2017), and these threat-sensitive patterns of movement are often influenced by those of nearby conspecifics (Underwood 1982). For example, various species of prey animals have been shown to manifest greater group cohesion and greater behavioural coordination under higher perceived predation risk (Bode et al. 2010; Schaerf et al. 2017; Kent et al. 2019).
Studies on a range of different species, including fishes, rodents, ravens and primates, have demonstrated that movement behaviour and exploration is often socially facilitated, as the risk associated with such behaviours is mitigated by the presence of other individuals through the effects of dilution (Hughes 1969; Stöwe et al. 2006; Dindo et al. 2009; Ward 2012). Similarly, it has been shown that animals in larger groups move in a qualitatively and quantitatively different manner to those in smaller groups (Herbert-Read et al. 2013). Thus, social context has considerable influence on the movement behaviour of individuals within a group. However, the use of socially transmitted information to inform behaviour is not limited to animals which manifest social attraction. Animals that do not live in social aggregations, including many cryptic animals, also likely use information acquired from conspecifics in a variety of contexts (Blanchet et al. 2010). Although it has been established that locomotory behaviour is central to the strategy of cryptic animals, little research has been conducted to investigate how cryptic animals may use the socially acquired information to moderate their movement behaviour.
In recent years, significant progress has been made in understanding how patterns of coordinated group movement emerge from interactions between neighbours. Similarly, the application of information-theoretic measures has allowed us to quantify and thus better understand information transfer between animals (Tomaru et al. 2016). In particular, transfer entropy (Schreiber 2000) is an asymmetric measure that quantifies the directed flow of information from one animal to another based on the time series of their respective trajectories (Ward et al. 2018). Specifically, it quantifies how the speed and heading of an individual is influenced by that of its neighbours. It has been used to demonstrate leader-follower relationships (Strandburg-Peshkin et al. 2018), to evaluate how social context influences locomotory decision-making (Tomaru et al. 2016) and to examine how predator-prey interactions are shaped by information transfer among prey (Marras et al. 2012) and between predators and prey (Handegard et al. 2012; Hu et al. 2015). These technologies and techniques offer opportunities to further expand our understanding of the ways in which animals utilise socially transmitted information to inform their patterns of behaviour under different ecological contexts. Previous studies on information transfer have primarily focused on animals in social groups and report measurable transfer entropy (i.e. non-zero transfer entropy) between group members across all contexts (Ward et al. 2018; Wilson et al. 2019). However, less is known about information flow among less sociable species, including many cryptic animals. This is of importance since the locomotory behaviour of cryptic animals is an integral part of their anti-predatory strategy and it remains unknown whether this is informed by social information.
The goby species used in the following experiments is non-territorial and typically occurs at high densities throughout its range (AW, pers. obs.). It does not, however, form shoals and shows no evidence of social attraction towards conspecifics. They exhibit intermittent movement, characteristic of many cryptic prey animals, particularly those relying on camouflage. This makes them an ideal study species to address the hypothesis that cryptic prey animals exhibit different patterns of behaviour in regard to (a) movement, (b) spatial distribution and (c) information transfer according to their external context, defined here by the type of chemical cues present. Specifically, we predicted that gobies would exhibit more threat-sensitive behaviour when exposed to alarm cues than when exposed to either food or control cues (Hoare et al. 2004), in particular, increasing their duration of stasis between movements, decreasing their distance to near neighbours and increasing their reliance on social information, measured as transfer entropy.
Methods
Study system and animal husbandry
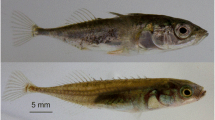
The goby Pseudogobius species 9, previously referred to as Pseudogobius olorum, and part of a species complex undergoing taxonomic resolution, was used as the model species. Members of this genus are widely distributed throughout temperate, sub-tropical and tropical waters of the Indo-Pacific, occurring in shallow freshwater, marine and estuarine habitats (McGrouther 2019). The range of this species extends from southern Queensland to Victoria. It grows to a maximum body size of approximately 76 mm. The fish used in this experiment measured 30 ± 5 mm and were likely juveniles. Due to the absence of any clear sexual dimorphism, both sexes were used for experimentation. Like many fish species, this goby is capable of changing its body colour in response to variation in the physical environment. As is common among gobiids, this species lacks a swim bladder and is adapted to a benthic lifestyle spent in close association with the substrate. This species is non-burrowing and demonstrates a characteristic intermittent pattern of locomotion, with relatively long periods of stillness punctuated by short hops forward.
Fish were collected from a field site at Middle Creek, Narrabeen, NSW, Australia (33.718491° S, 151.270281° E) in November 2019 and January 2020 using large hand-held nets. Fish were captured in shallow waters approximately 5–20 cm in depth. Permits for capture were obtained from the NSW Department of Primary Industries. Following capture, the fish were transported in oxygenated water to holding facilities at the University of Sydney. There, they were housed in tanks containing substrate composed of natural sand and variegated gravel, intended to represent a typical physical environment commonly encountered by this species in the wild. Water temperature was maintained at 25 °C, with a salinity of 10 ppt, both of which are typical of the conditions experienced by this species in the wild at the time of capture. Regular water changes were conducted at fortnightly intervals. They were fed daily with commercially available fish food (Nutrafin Tropical Flakes, Hagen Products, Germany) and their health was monitored prior to testing. To minimise observer bias, blinded methods were used in the analysis of behavioural data using tracking software. All experiments were approved by the University of Sydney’s Animal Ethics Committee, ref 2019/1616.
Experimental apparatus
Experiments were performed in a flow-through arena measuring 170 cm × 45 cm with walls of 10 cm height, filled to a water depth of 7 cm (see Fig. 1). The arena was constructed of white plastic, while compartments were created using measured and cut pieces of opaque, white Corflute®, 6 mm in cross-section, fixed in place using aquarium sealant. The arena was sub-divided widthwise into 6 compartments. The four central compartments (35 cm × 45 cm) were used to house experimental subjects. The arena also contained two smaller compartments (25 cm × 45 cm) at either end, the rearmost of which contained a Rio 200 pump (Taam Inc., California, USA) which circulated water at a rate of 1.65 L/min to the foremost compartment via a length of PVC tubing. Constraining the pump and the inflow to their own separate compartments enabled us to reduce any excess turbulence that the subjects might otherwise experience. Rectangular vents measuring 40 mm2 in the walls of each compartment allowed water to flow between compartments. The vents were set into the walls at a height of 25 mm and at alternate ends of the walls (see Fig. 1). These vents were covered on both sides of the dividers with two layers of fine mesh (with a mesh size of 1 mm). This double layer of mesh, coupled with the fact that the gobies spend the majority of their time resting or swimming in close proximity to the base of the arena, below the level of the vents, meant that visual communication between subjects in different compartments was minimal. The arena was situated in a temperature-controlled room at the University of Sydney, and the water in the arena was kept at the same temperature and salinity as that of the holding tanks. The arena was lit by LED lights (6500 K) and surrounded by opaque, white corflute fixed to an aluminium frame along the sides and above the arena (at a height of 500 mm) in order to minimise visual disturbance to subjects. Lights were set to a photoperiod identical to that used in holding conditions (12:12-h light:dark).

Schematic diagram of the flow-through arena (not to scale). Water flow is shown in blue, indicating the direction of flow from the rearmost pump-housing compartment to the foremost compartment and through each of the fish-holding compartments, as confirmed by dye tests. The width and height of each compartment are shown. The depth of the compartments was 10 cm
Dye tests were performed in order to establish the rate at which cues would flow through the arena following their introduction to the compartment housing the pump. From this, we established both the time taken for the cues to first enter and then fully saturate each compartment. In each case, the cues first entered a compartment approximately 50 s prior to saturation of that compartment. The cues fully saturated the first fish-holding compartment after 4 min, the second after 6 min, the third after 8 min and the final compartment after 10 min. We used this information to determine the point at which we began filming each respective compartment.
Experimental protocol
We added four fish to each of the four compartments (to a total of 16 fish) and allowed them to habituate for 24 h before testing. Subsequently, three experimental treatments were performed adding (1) food cues, (2) conspecific alarm cues or (3) control cues over the next 3 days, so that fish were exposed to one treatment per day. The order in which these treatments were presented was randomised. Treatments were consistently presented in the afternoon, between 3 and 5 pm.
Food cues were prepared by adding one heaped teaspoon (approximately 15 mL) of flaked fish food to 200 mL of aged fresh water. This mixture was stirred for 1 min until the food and water were thoroughly mixed before the mixture was sieved through a fine mesh in order to ensure that all suspended particles were removed. Alarm cues were prepared as per Schaerf et al. (2017). Two conspecific gobies were humanely euthanised with a sharp blow to the head before being macerated using a mortar and pestle. The resultant residue was added to 200 mL of aged freshwater and sieved through a fine mesh to remove any suspended solids. The chemical cues produced by this method are a salient ecological indicator of predator activity, mimicking the result of a predation event. They are known to produce a response in a variety of fish species (Chivers and Smith 1998; Wisenden 2000; Brown 2003). Control cues were prepared by simply sieving 200 mL of water through a fine mesh. All equipment was cleaned thoroughly in water, then left to soak in running water for ~ 30 min and finally left to dry for 24 h between treatment preparations in order to avoid cross-contamination.
At the beginning of each set of treatments, we added 200 mL of cues into the compartment housing the pump and began timing. After 4 min had elapsed, filming of the first fish-housing compartment was initiated, as per the results of the dye test. Filming of the second, third and fourth compartments began in 6, 8 and 10 min after the introduction of the cues respectively. Trials were filmed from above, through small (30 mm) holes cut into the ceiling of the screens. A Canon G1X (Canon, Japan) was used, filming at 30 frames per second and at a resolution of 1080 p. The small size of the apertures, through which we filmed, and their distance from the study animals minimised any disturbance caused by moving the camera and we did not see any signs of disturbance resulting from this. After the fish had undergone testing with exposure to all three treatments (food, conspecific alarm, control), they were removed from the arena and placed in a holding tank in order to separate them from untested individuals. The arena was then drained and cleaned before being refilled and a new set of fish added. This procedure was repeated four times (using a total of 64 fish) to a sample size of N = 16 (4 sets of fish × 4 trials). The analysis was only performed for 15 of the groups, due to signs of ill health in one individual during the latter stages of testing.
The arena was not cleaned in between daily treatments on the same groups. This was decided firstly on the basis that flushing the arena after each treatment would likely expose the fish to undue disturbance. Secondly, chemical cues provided during the treatments are known to have a short period of persistence, breaking down rapidly and becoming biologically inactive and thus unable to produce a prolonged response in the animals. Previous use of food and alarm cues shows peak responses in experimental subjects within 1–10 min, inducing progressively weaker responses as the cues undergo biochemical degradation and the fish habituate (Schaerf et al. 2017). The estimated half-life of such cues is estimated between 12 min and 7 h (Wisenden et al. 2009; Chivers et al. 2013). Since experimental groups were tested at 24-h intervals, it was deemed sufficiently improbable that any cues would remain. Nonetheless, the order in which the cues were presented to each group was randomised in order to account for any potential longer-term effects.
Data extraction
Clips of film from each group were cut and converted to AVI format using VirtualDub (virtualdub.org) and were then tracked using automated tracking software CTrax (Branson et al. 2009). Although there was a duration of 2 min between the commencement of filming of each compartment, part of this was taken up with moving and repositioning the camera. Consequently, we used the first 90 s of film for tracking, during which the gobies first detected and responded to the cues. At a frame rate of 30 fps, each tracked clip yielded 2700 data points per individual fish, per treatment, and was calibrated to millimetre.
Data analysis
Locomotory behaviour
We calculated the proportion of time spent moving, where a goby was identified as moving at a given time if its speed s(t) ≥ 1 mm/frame.
The analysis was performed using R (R Core Team 2013). Data assumptions were tested using visual inspection of Q-Q plots. To analyse the amount of time spent moving, we used the raw data (i.e. the number of frames in which an individual was moving) rather than proportional data for the analysis. The response variable was positively skewed; hence, we specified a gamma distribution of errors in a generalised mixed-effect model (glmer). ‘Treatment’ (control, alarm and food), ‘day’ (the day of testing; day 1, day 2 and day 3) and ‘compartment’ (compartments 1, 2, 3 or 4 within the arena, where compartment 1 was closest to the inflow) were included as fixed effects. We included compartment as a factor to examine the possibility that experimental subjects in different compartments could influence one another by producing disturbance cues, particularly in response to the alarm cues (Bairos-Novak et al. 2019; Meuthen et al. 2019). Day and compartment were treated as fixed effects, rather than random effects, since in both cases, there were fewer than the recommended minimum number of levels (Clark and Linzer 2015). We included ‘group’ as a random effect to control for the repeated measures nature of the data. In addition to the above, we examined for the presence of multicollinearity by calculating the variance inflation factor. Subsequently, we performed post hoc tests using the glht function from the R package ‘multcomp’, specifying Tukey HSD tests.
Durations and frequencies of bouts of movement and stillness
We determined the durations of all periods of movement or stillness for all gobies across all experimental trials. We then conducted a mixed-effect survival analysis, using the coxme package for R to compare durations spent moving or still across treatments (Therneau 2020). We treated any duration of stillness or movement that commenced at the first frame of observations or that was continuing at the end of observations, as right censored, and all other durations as uncensored. We constructed Kaplan-Meier estimates of survival functions with 95% confidence bounds for durations of movement or stillness for each treatment. Each survival function, S(t), represented the probability that a goby moved or was still for a duration greater than t frames. We specified fixed and random effects, and also performed post hoc testing, as described above.
Distances between gobies
We calculated the mean distance between each fish and the other fish within its experimental compartment at each frame and then calculated a grand mean for each fish over the entire trial. The mean neighbour distance response variable satisfied the assumptions of normality; hence, we used a linear mixed-effects model (lmer from the package lme4) to analyse mean neighbour distance. We specified fixed and random effects, and also performed post hoc testing, as described above.
Positions of neighbours relative to a focal individual
We used the methods described in detail in Schaerf et al. (2017) to examine the statistical distribution of relative neighbour positions relative to a focal individual. This function, describing the distribution of relative neighbour positions, was determined by first transforming to a consistent coordinate system where a focal individual was located at the origin (0,0), and the direction of motion of the focal individual was parallel to the positive x-axis. A square domain centred on the focal individual was then sub-divided into smaller overlapping square bin regions. The larger square domain extended over the region where − 150 < x ≤ 150, − 150 < y ≤ 150 (millimetres), that is, out to distances of approximately 5 body lengths to the front and back, and to the left and right, of the focal individual. The smaller square bin regions had side lengths of 15 mm (approximately half a body length for the gobies), with the leftmost and/or bottommost edges of adjacent bins separated by 3.75 mm (one-quarter of a bin width). Square bins and the rectangular (x, y) coordinate system were chosen so that each bin covered equal areas of the domain near the focal individual (as opposed to bins based on distances to, and angular ranges containing groupmates, where the area of bins would grow as the distance from the focal individual increased). The overlap of the bins is a means to smooth the resulting plot, analogous to the moving window used to calculate a moving average. The number of times that neighbours occupied each bin was counted, with data aggregated by treating all group members as the focal individual in turn. Absolute counts in each bin were then normalised by dividing by the total counts across all bins.
We adapted the randomisation method based on the mean absolute difference between pairs of fitted functions (TMS et al. unpubl. data) for across group comparisons to examine if there was a significant difference across treatments. We adjusted the thresholds for significance for the mean absolute difference randomisation tests according to the Holm-Bonferroni method (Holm 1979), to take into account multiple pairwise comparisons.
In addition to the analyses presented as part of the main text here, we considered a broader range of local interactions, including alignment, speed, change in speed and change in heading of a focal individual relative to the positions of near neighbours which we present in the Supplementary Information.
Information flow
Information flow between individuals in a group was quantified using measures of transfer entropy in the JIDT package for MATLAB (Lizier 2014). Transfer entropy is an information-theoretic measure which quantifies the directed flow of information within a network (Schreiber 2000; Bossomaier et al. 2016), in this case, as the degree to which the trajectory of one individual is informed by the trajectory of other individuals in the group. More generally, transfer entropy may be described in relation to two-time series within a network, X and Y. For example, transfer entropy from X to Y describes the reduction in uncertainty in predicting future values of X based on previous values of Y in relation to previous values of X. This method of quantifying the directed flow of information is often used to quantify social influence and mutual information transfer within social networks. As such, groups with a higher degree of directed information transfer are expected to exhibit higher values of transfer entropy.
Mean group transfer entropy was calculated for each experimental replicate from the relative speed of source fish to speed changes in target fish, by creating samples of speeds computed from the (x, y) coordinates of all source-target pairs within a distance range of 300 mm (as detailed in Crosato et al. 2018) at all 2700 time steps in the replicate. We used the Kraskov, Stögbauer and Grassberger estimator (Kraskov et al. 2004) from the Java Information Dynamics Toolkit open-source software (Lizier 2014) to compute the estimate. We ran an optimisation for source-target lag, and history embedding length k and delay tau (as detailed in Crosato et al. 2018), determining these to be set as 2, 1 and 8. We visually inspected the data using Q-Q plots and analysed using the lmer function in the lme4 package for R, with the same fixed and random effects described previously, and applying the same post hoc testing procedure.
Finally, to assess whether a statistically significant (non-zero) information transfer was occurring between fish within treatment groups, we compared the mean group transfer entropy observed in each treatment to a predicted null distribution (Lizier 2014). One sample of the transfer entropy under the null distribution is empirically constructed by shuffling the observations of source fish against the target past and future; this maintains the transition dynamics of target fish but statistically decouples these from source fish observations, consistent with a null hypothesis of no observed information transfer. For each treatment, we constructed 1000 samples from the null distribution for transfer entropy and then compared the observed transfer entropy for the treatment to this distribution to compute a p value of observing such a transfer entropy if the source fish do not add information to the trajectory of the targets.
Results
Locomotory behaviour
There was a significant effect of treatment on the amount of time spent moving by gobies (χ2 = 15.23, p < 0.001, see Fig. 2) but no effect of day (χ2 = 0.008, p = 0.996) or compartment (χ2 = 2.745, p = 0.433). The marginal coefficient of determination (pseudo-r2) for the overall model was 0.348. Gobies in the food treatment spent more time moving than those in the alarm (Z = 3.073, p = 0.006) or control treatments (Z = 2.923, p = 0.009). There was no difference in the time spent moving between the alarm and control treatments (Z = 0.313, p = 0.946).

Boxplot showing the median proportion of time spent moving by gobies according to treatment. Boxes represent IQR, while whiskers represent 1.5 × IQR. Outliers lie outside 1.5 × IQR. Pairwise comparisons among treatments are indicated by brackets, with statistical significance denoted by NS (p > 0.05) and ** (p < 0.01)
Durations and frequencies of bouts of movement and stillness
There was a significant effect of treatment on the duration of time spent static by gobies (χ2 = 28.381, p < 0.001, see Fig. 3a) but no effect of compartment (χ2 = 0.213, p = 0.6444) or day (χ2 = 0.006, p = 0.981). Gobies exposed to food cues engaged in shorter bouts of stillness than when exposed to alarm cues (Z = 3.309, p = 0.003) or a control (Z = 4.994, p < 0.001). There was no difference in the time spent static between the alarm and control treatments (Z = 0.887, p = 0.646).

Estimates for survival functions, S(t), for unbroken durations of a stillness or b movement for gobies in control (green), food (blue), and alarm (red) treatments. Ninety-five percent confidence bounds are plotted as lightly shaded regions around each survival curve
Similarly, there was a significant effect of treatment on the amount of time spent moving by gobies (χ2 = 9.923, p = 0.007, see Fig. 3b) but no effect of compartment (χ2 = 1.832, p = 0.176) or day (χ2 = 0.163, p = 0.686). Gobies exposed to alarm cues engaged in shorter movement bouts than when exposed to food cues (Z = 2.528, p = 0.03) or a control (Z = 3.067, p = 0.006). There was no difference in the time spent moving between the food and control treatments (Z = 1.041, p = 0.548).
Distances between gobies
There was a significant effect of treatment on the mean distance between gobies (χ2 = 16.72, p < 0.001, see Fig. 4) but no effect of day (χ2 = 2.45, p = 0.118) or compartment (χ2 = 1.347, p = 0.246). The marginal coefficient of determination (pseudo-r2) for the overall model was 0.093. The mean distance between neighbours was greater in the control treatment than in the alarm (Z = 2.881, p = 0.011) or food treatments (Z = 3.893, p < 0.001). There was no difference in the mean distance between neighbours between the food and alarm treatments (Z = 0.957, p = 0.604).

Boxplots showing the median distance to neighbours (mm) according to treatment. Boxes represent IQR, while whiskers represent 1.5 × IQR. Outliers lie outside 1.5 × IQR. Pairwise comparisons among treatments are indicated by brackets, with statistical significance denoted by NS (p > 0.05), * (p < 0.05) and *** (p < 0.001)
Positions of neighbours relative to a focal individual
When in range (within 150 mm in the x- and y-directions), other gobies most frequently occupied an annular region centred on the focal individual (Fig. 5a–c). This region seems to have been tighter for gobies subject to alarm cues (Fig. 5a), and most diffuse for those subject to food cues (Fig. 5c), with the differences across these treatments identified as significant by a mean absolute difference randomisation test (Table 1). A central circular region of approximate radius 25 mm with lower relative frequencies of groupmate occupancy is evident for alarm cue groups (Fig. 5a), consistent with individuals maintaining a small region of personal space even when other gobies were more likely close by.

Frequency distribution of groupmates relative to focal fish positioned at the origin, and moving parallel to the positive x-axis, for a alarm cue, b control and c food cue treatments. The conspecific alarm cue treatment shows a higher occurrence of neighbours in close proximity to the focal individual, whereas the food cue treatment shows greater dispersion. P denotes the relative frequency at which neighbours were observed at given x, y coordinates
Transfer entropy
There was a significant effect of treatment on mean pairwise transfer entropy (χ2 = 11.237, p = 0.004, see Fig. 6) but no effect of day (χ2 = 4.514, p = 0.105) or compartment (χ2 = 1.573, p = 0.666). The marginal coefficient of determination (pseudo-r2) for the overall model was 0.347. Gobies in the alarm treatment showed higher levels of transfer entropy than those in the food (Z = 2.35, p = 0.047) or control treatments (Z = 2.259, p = 0.003). There was no difference in mean pairwise transfer entropy between the food and control treatments (Z = 0.823, p = 0.689).

Boxplots showing median transfer entropy according to treatment, expressed as the natural log (nats) of information measured in bits. Boxes represent IQR, while whiskers represent 1.5 × IQR. Outliers lie outside 1.5 × IQR. Pairwise comparisons among treatments are indicated by brackets, with statistical significance denoted by NS (p > 0.05), * (p < 0.05) and ** (p < 0.01)
The transfer entropy measured in the alarm cue treatment was significantly greater than predicted under a null distribution. By contrast, transfer entropy measured in the control and food cue treatments was not significantly different from the null distribution. From this, we can infer that information transfer between individuals was detected in the alarm treatment (p < 0.05) but not in the food treatment (p > 0.05) or the control treatment (p > 0.05).
Discussion
The presence of water-borne chemical cues was found to produce significant effects on the behaviour of the gobies. In particular, those exposed to alarm cues showed different patterns of locomotion and a higher encounter frequency with neighbours at a distance of one to two body lengths compared to those in other treatments. Information transfer was greatest in the alarm treatment than in either of the other two treatments. Furthermore, this was the only treatment in which a measurable (non-zero) amount of transfer entropy was detected.
For prey animals, patterns of behaviour are largely defined by trade-offs between the competing imperatives of predator avoidance and other fitness-related activities, such as foraging and courtship (Helfman 1989; Lima and Dill 1990; Ferrari et al. 2009). For cryptic prey animals, many of these trade-offs centre on decisions regarding whether or not to move, and how to move. The perceived availability of food is known to exert significant effects on the behaviour of animals. As foraging opportunities are highly valuable and often highly competitive, the incentive for animals to seek out these opportunities is high, even if they must expose themselves to risk to do so. These factors likely explain the shorter durations of stasis for gobies in the food treatment, relative to those in other treatments, which resulted in a significantly greater proportion of time spent moving. Contrastingly, when an alarm cue was present, gobies responded by reducing the duration of their movement bouts. Since cryptic animals often rely on immobility to retain the benefits of camouflage, movement puts the animals at greater risk of predation. Reducing movement when the animals perceive the risk to be elevated likely represents an adaptive strategy to mitigate this (Houtman and Dill 1994; Martel and Dill 1995; Ioannou and Krause 2009). In addition, studies have suggested that patterns of locomotion are at least partly determined by the updating frequency of visual information (Kramer and McLaughlin 2001; Bode et al. 2010). Visual acuity relies on a series of discrete eye movements including a fixation on objects within the visual field, during which the eye must remain still relative to the object (Carpenter 1988; Kramer and McLaughlin 2001). By reducing the duration of movement bouts, particularly under threat, prey animals potentially allow themselves to make a more frequent and accurate assessment of ambient levels of risk.
Gobies adapted their distances to conspecifics and their patterns of distribution relative to those conspecifics according to the cues present. In particular, those exposed to conspecific alarm cues adjusted their spacing behaviour to concentrate in close proximity to near neighbours while the opposite was true for those in the food cue treatment. This pattern is similar to that found in shoaling fish species (Hoare et al. 2004; Schaerf et al. 2017). While the subjects of the present experiment do not appear to shoal, this finding demonstrates the general application and importance of concepts such as domains of danger and the selfish herd, irrespective of social tendency (Hamilton 1971; Morrell et al. 2011).
Information transfer between gobies was greatest when alarm cues were present. This is compatible with previous work which shows that animals exhibit greater responsiveness to social information under threat than they do in other circumstances (Griffin 2004; Fallow and Magrath 2010; McLachlan et al. 2019). However, this is the first time the trend has been identified and quantified using information-theoretic measures. Interestingly, information flow measured as transfer entropy was only detected in the alarm cue treatment and not in either the food or control treatments. This differs from previous investigations of transfer entropy centred on shoaling fish species which found non-zero transfer entropy across all contexts (Crosato et al. 2018; Wilson et al. 2019), potentially because of greater mobility of many shoaling species relative to the gobies used here, but supports the generality of the findings that social information is particularly important when under threat (Lima and Dill 1990; Webster and Laland 2017). While the pairwise transfer entropy used here can be susceptible to conflating a common driver effect (in this case, an independent response by each goby to the cues) with the source effect (social information arising from the behaviour of other gobies), our experimental approach of only collecting replicates once each compartment was fully saturated with the alarm cue means that this common driver was controlled for in the information-theoretic calculation. As a result, the transfer entropy detected here relates to social information in the context of this alarm cue.
The context-dependent use of social information has received considerable attention as it offers valuable insight into how animals collect information and make decisions according to both environmental and social context (Kendal et al. 2004; Webster and Laland 2012; Smolla et al. 2016). However, despite the value of social information to animals irrespective of their social tendencies, comparatively little research in this area has focused on cryptic species and those that do not typically live within groups (Webster and Laland 2017).
Avoiding detection by predators is central to the behaviour of cryptic prey species, and the importance of appropriately regulating bouts of movement and stasis in order to reduce the probability of predation has been acknowledged in several studies (Wright and O’Brien 1982; Martel and Dill 1995; Ioannou and Krause 2009). Intermittent locomotion is a feature of a large and diverse range of animal species, for both energetic and strategic reasons (Wilson and Godin 2010; Paoletti and Mahadevan 2014). However, fine-scale changes in movement profiles in response to varying levels of risk, such as those examined here, have received little attention. In the present experiment, we report changes in both the duration of movement and the duration of stasis according to context. A logical next step would be to examine how cryptic animals manage potential trade-offs, such as when cues associated with elevated risk coincide with cues that indicate foraging opportunities (Hazlett 1999). In addition, an important future avenue for research would be to quantify the functional benefits of changing movement strategies by conducting experiments allowing interaction between predators and cryptic prey. In these ways, important insights may be provided into the ways in which changes to movement profiles translate to different behavioural outcomes such as predator avoidance and foraging success.
Data availability
All data used is available as csv files via Figshare https://doi.org/10.6084/m9.figshare.13180709.v1.
References
Bairos-Novak KR, Ferrari MC, Chivers DP (2019) A novel alarm signal in aquatic prey: Familiar minnows coordinate group defences against predators through chemical disturbance cues. J Anim Ecol 88:1281–1290
Ballerini M, Cabibbo N, Candelier R, Cavagna A, Cisbani E, Giardina I, Orlandi A, Parisi G, Procaccini A, Viale M, Zdravkovic V (2008) Empirical investigation of starling flocks: a benchmark study in collective animal behaviour. Anim Behav 76:201–215. https://doi.org/10.1016/j.anbehav.2008.02.004
Blanchet S, Clobert J, Danchin E (2010) The role of public information in ecology and conservation: an emphasis on inadvertent social information. Ann NY Acad Sci 1195:149–168. https://doi.org/10.1111/j.1749-6632.2010.05477.x
Bode NWF, Faria JJ, Franks DW, Krause J, Wood AJ (2010) How perceived threat increases synchronization in collectively moving animal groups. Proc R Soc Lond B 277:3065–3070. https://doi.org/10.1098/rspb.2010.0855
Bossomaier T, Barnett L, Harré M, Lizier JT (2016) An introduction to transfer entropy: information flow in complex systems. Springer, Cham. https://doi.org/10.1007/978-3-319-43222-9
Branson K, Robie AA, Bender J, Perona P, Dickinson MH (2009) High-throughput ethomics in large groups of Drosophila. Nat Methods 6:451–457
Brown GE (2003) Learning about danger: chemical alarm cues and local risk assessment in prey fishes. Fish Fish 4:227–234
Carpenter RH (1988) Movements of the Eyes. Pion Limited, London
Chivers DP, Smith RJF (1993) The role of olfaction in chemosensory-based predator recognition in the fathead minnow, Pimephales promelas. J Chem Ecol 19:623–633
Chivers DP, Smith RJF (1998) Chemical alarm signalling in aquatic predator-prey systems: a review and prospectus. Ecoscience 5:338–352. https://doi.org/10.1080/11956860.1998.11682471
Chivers DP, Dixson DL, White JR, McCormick MI, Ferrari MCO (2013) Degradation of chemical alarm cues and assessment of risk throughout the day. Ecol Evol 3:3925–3934. https://doi.org/10.1002/ece3.760
Clark TS, Linzer DA (2015) Should I use fixed or random effects? Polit Sci Res Methods 3:399–408
Crosato E, Jiang L, Lecheval V, Lizier JT, Wang XR, Tichit P, Theraulaz G, Prokopenko M (2018) Informative and misinformative interactions in a school of fish. Swarm Intell 12:283–305
Dindo M, Whiten A, de Waal FBM (2009) Social facilitation of exploratory foraging behavior in capuchin monkeys (Cebus apella). Am J Prim 71:419–426
Fallow PM, Magrath RD (2010) Eavesdropping on other species: mutual interspecific understanding of urgency information in avian alarm calls. Anim Behav 79:411–417
Fernandez-Juricic E, Kacelnik A (2004) Information transfer and gain in flocks: the effects of quality and quantity of social information at different neighbour distances. Behav Ecol Sociobiol 55:502–511. https://doi.org/10.1007/s00265-003-0698-9
Ferrari MC, Sih A, Chivers DP (2009) The paradox of risk allocation: a review and prospectus. Anim Behav 78:579–585
Griffin AS (2004) Social learning about predators: a review and prospectus. Learn Behav 32:131–140
Hamilton WD (1971) Geometry for the selfish herd. J Theor Biol 31:295–311
Handegard NO, Boswell KM, Ioannou CC, Leblanc SP, Tjostheim DB, Couzin ID (2012) The dynamics of coordinated group hunting and collective information transfer among schooling prey. Curr Biol 22:1213–1217. https://doi.org/10.1016/j.cub.2012.04.050
Hansen MJ, Ligocki IY, Zillig KE, Steel AE, Todgham AE, Fangue NA (2020) Risk-taking and locomotion in foraging threespine sticklebacks (Gasterosteus aculeatus): the effect of nutritional stress is dependent on social context. Behav Ecol Sociobiol 74:12. https://doi.org/10.1007/s00265-019-2795-4
Hazlett BA (1999) Responses to multiple chemical cues by the crayfish Orconectes virilis. Behaviour 136:161–177
Hazlett BA, Schoolmaster DR (1998) Responses of cambarid crayfish to predator odor. J Chem Ecol 24:1757–1770
Helfman G (1989) Threat-sensitive predator avoidance in damselfish-trumpetfish interactions. Behav Ecol Sociobiol 24:47–58
Herbert-Read JE, Krause S, Morrell LJ, Schaerf TM, Krause J, Ward AJW (2013) The role of individuality in collective group movement. Proc R Soc B 280:20122564. https://doi.org/10.1098/rspb.2012.2564
Hoare DJ, Couzin ID, Godin J-GJ, Krause J (2004) Context-dependent group size choice in fish. Anim Behav 67:155–164. https://doi.org/10.1016/j.anbehav.2003.04.004
Holm S (1979) A simple sequentially rejective multiple test procedure. Scand J Stat 6:65–70
Houtman R, Dill LM (1994) The influence of substrate color on the alarm response of tidepool sculpins (Oligocottus maculosus; Pisces, Cottidae). Ethology 96:147–154
Hu F, Nie LJ, Fu SJ (2015) Information dynamics in the interaction between a prey and a predator fish. Entropy 17:7230–7241. https://doi.org/10.3390/e17107230
Hughes R (1969) Social facilitation of locomotion and exploration in rats. Brit J Psychol 60:385–388
Humphries DA, Driver PM (1970) Protean defence by prey animals. Oecologia 5:285–302. https://doi.org/10.1007/bf00815496
Ioannou CC, Krause J (2009) Interactions between background matching and motion during visual detection can explain why cryptic animals keep still. Biol Lett 5:191–193
Kendal RL, Coolen I, Laland KN (2004) The role of conformity in foraging when personal and social information conflict. Behav Ecol 15:269–277. https://doi.org/10.1093/beheco/arh008
Kent MIA, Burns AL, Figueira WF, Mazue GPF, Porter AG, Wilson ADM, Ward AJW (2019) Risk balancing through selective use of social and physical information: a case study in the humbug damselfish. J Zool 308:235–242. https://doi.org/10.1111/jzo.12669
Kramer DL, McLaughlin RL (2001) The behavioral ecology of intermittent locomotion. Am Zool 41:137–153. https://doi.org/10.1668/0003-1569(2001)041[0137:tbeoil]2.0.co;2
Kraskov A, Stögbauer H, Grassberger P (2004) Estimating mutual information. Phys Rev E 69:066138
Lima SL, Dill LM (1990) Behavioral decisions made under the risk of predation: a review and prospectus. Can J Zool 68:619–640
Lizier JT (2014) JIDT: an information-theoretic toolkit for studying the dynamics of complex systems. Front Robot AI 1:11
Marras S, Batty RS, Domenici P (2012) Information transfer and antipredator maneuvers in schooling herring. Adapt Behav 20:44–56. https://doi.org/10.1177/1059712311426799
Martel G, Dill LM (1995) Influence of movement by coho salmon (Oncorhynchus kisutch) parr on their detection by common mergansers (Mergus merganser). Ethology 99:139–149
McGrouther M (2019) Blue-spot Goby, Pseudogobius sp. 9. The Australian Museum. https://australian.museum/learn/animals/fishes/blue-spot-goby-pseudogobius-sp-9/
McLachlan JR, Ratnayake CP, Magrath RD (2019) Personal information about danger trumps social information from avian alarm calls. Proc R Soc B 286:20182945. https://doi.org/10.1098/rspb.2018.2945
Meuthen D, Ferrari MC, Lane T, Chivers DP (2019) High background risk induces risk allocation rather than generalized neophobia in the fathead minnow. Behav Ecol 30:1416–1424
Morrell LJ, Ruxton GD, James R (2011) Spatial positioning in the selfish herd. Behav Ecol 22:16–22
O’Brien WJ, Evans BI (1991) Saltatory search behavior in five species of planktivorous fish. Verh Internat Verein Limnol 24:2371–2376
Paoletti P, Mahadevan L (2014) Intermittent locomotion as an optimal control strategy. P Roy Soc Lond A Math 470:20130535
R Core Team (2013) R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna. http://www.R-project.org/
Schaerf TM, Dillingham PW, Ward AJW (2017) The effects of external cues on individual and collective behavior of shoaling fish. Sci Adv 3:e1603201. https://doi.org/10.1126/sciadv.1603201
Schreiber T (2000) Measuring information transfer. Phys Rev Lett 85:461–464
Smolla M, Alem S, Chittka L, Shultz S (2016) Copy-when-uncertain: bumblebees rely on social information when rewards are highly variable. Biol Lett 12:20160188. https://doi.org/10.1098/rsbl.2016.0188
Stöwe M, Bugnyar T, Loretto M-C, Schloegl C, Range F, Kotrschal K (2006) Novel object exploration in ravens (Corvus corax): effects of social relationships. Behav Process 73:68–75
Strandburg-Peshkin A, Papageorgiou D, Crofoot MC, Farine DR (2018) Inferring influence and leadership in moving animal groups. Phil Trans R Soc B 373:20170006. https://doi.org/10.1098/rstb.2017.0006
Therneau TM (2020) coxme: mixed effects Cox models. R package version 2.2-16. https://CRAN.R-project.org/package=coxme
Tomaru T, Murakami H, Niizato T, Nishiyama Y, Sonoda K, Moriyama T, Gunji YP (2016) Information transfer in a swarm of soldier crabs. Artif Life Robot 21:177–180. https://doi.org/10.1007/s10015-016-0272-y
Underwood R (1982) Vigilance behavior in grazing African antelopes. Behaviour 79:81–107
Ward AJW (2012) Social facilitation of exploration in mosquitofish (Gambusia holbrooki). Behav Ecol Sociobiol 66:223–230. https://doi.org/10.1007/s00265-011-1270-7
Ward AJW, Schaerf TM, Burns ALJ, Lizier JT, Crosato E, Prokopenko M, Webster MM (2018) Cohesion, order and information flow in the collective motion of mixed-species shoals. R Soc Open Sci 5:181132. https://doi.org/10.1098/rsos.181132
Webster MM, Laland KN (2012) Social information, conformity and the opportunity costs paid by foraging fish. Behav Ecol Sociobiol 66:797–809. https://doi.org/10.1007/s00265-012-1328-1
Webster MM, Laland KN (2017) Social information use and social learning in non-grouping fishes. Behav Ecol 28:1547–1552. https://doi.org/10.1093/beheco/arx121
Wilson ADM, Godin J-GJ (2010) Boldness and intermittent locomotion in the bluegill sunfish, Lepomis macrochirus. Behav Ecol 21:57–62
Wilson ADM, Burns ALJ, Crosato E, Lizier J, Prokopenko M, Schaerf TM, Ward AJW (2019) Conformity in the collective: differences in hunger affect individual and group behavior in a shoaling fish. Behav Ecol 30:968–974. https://doi.org/10.1093/beheco/arz036
Wisenden BD (2000) Olfactory assessment of predation risk in the aquatic environment. Phil Trans R Soc B 355:1205–1208
Wisenden BD, Rugg ML, Korpi NL, Fuselier LC (2009) Lab and field estimates of active time of chemical alarm cues of a cyprinid fish and an amphipod crustacean. Behaviour 146:1423–1442. https://doi.org/10.1163/156853909x440998
Wright DI, O’Brien WJ (1982) Differential location of Chaoborus larvae and Daphnia by fish: the importance of motion and visible size. Am Midl Nat 108:68–79
Wudkevich K, Wisenden BD, Chivers DP, Smith RJF (1997) Reactions of Gammarus lacustris to chemical stimuli from natural predators and injured conspecifics. J Chem Ecol 23:1163–1173
Acknowledgements
We thank Norman Gaywood and Greg Falzon for their support for this project through the provision and management of servers on the Turing computational system at the University of New England, which was vital for the completion of this work. The authors would like to thank the editors and two anonymous reviewers for their comments, which greatly improved this manuscript.
Funding
This work was funded by a grant from the Australian Research Council (DP190100660).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethics approval
All applicable international, national, and/or institutional guidelines for the use of animals were followed. All experiments were approved by the University of Sydney’s Animal Ethics Committee, ref 2019/1616.
Consent to participate
Not applicable.
Consent for publication
All authors consent to the manuscript being published.
Code availability
The JIDT software is available via https://github.com/jlizier/jidt. R code is available from the authors on request.
Additional information
Communicated by J. G. Frommen
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
ESM 1
(DOCX 2806 kb)
Rights and permissions
About this article

Cite this article
Encel, S.A., Schaerf, T.M., Lizier, J.T. et al. Locomotion, interactions and information transfer vary according to context in a cryptic fish species. Behav Ecol Sociobiol 75, 19 (2021). https://doi.org/10.1007/s00265-020-02930-0
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00265-020-02930-0