
Abstract
To better understand the behavior of the American lobster (Homarus americanus) in the wild, we developed the C-HAT (Crustacean Heart and Activity Tracker): a datalogger capable of continuously recording the triaxial acceleration, compass heading, and heart rate of lobsters that are freely moving in their natural habitat. C-HATs and acoustic transmitters were affixed to six lobsters that were released within an acoustic positioning array off the coast of New Hampshire (USA) and recaptured by divers after 15–47 h at large. Lobster heart rates tended to be ~ 60 beats per minute (bpm) at rest, but increased to ~ 80 bpm during periods of activity. The presence of brief cardiac startle responses during the beginning of some periods of activity suggested that at least a third of their movement bouts occurred in response to external stimuli, such as interactions with other species. The combination of acoustic positioning data and datalogging allowed us to determine if various indices of acceleration could be used to estimate distance traveled. We found a significant correlation between a Movement Index (MI), based on differentiation of the three axes of acceleration, and the distance lobsters traveled in 10 min based on telemetry data. This enabled us to use the MI in concert with compass headings to reconstruct lobster movement paths via dead reckoning. This study demonstrates the potential for low-cost, open-source, dataloggers to provide detailed information on the daily behavior and physiology of marine invertebrates in the wild.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Devices capable of logging key aspects of an animal’s behavior and physiology have become increasingly common in the study of a variety of species in their natural habitat (Rutz and Hays 2009; Wilmers et al. 2015; Börger et al. 2020). Using biologgers that couple environmental sensors, such as temperature and light, with measurements of animal movements and/or physiological status, researchers have been able to gain an unprecedented level of information about the daily lives of freely moving animals (Cooke et al. 2004; Goldstein and Pinshow 2006; Wilson et al. 2008; Brown et al. 2013; Whitford and Klimley 2019; Williams et al. 2020). Biologgers have been of particular interest for studies of marine animals because they are difficult to observe for long periods of time underwater, and seawater hinders electromagnetic communications, which precludes using radio transmitters, cellular data or GPS signals (Rutz and Hays 2009; Guerra-Castro et al. 2011; Whitford and Klimley 2019). To get around this problem, marine biologists often use either dataloggers that must be recovered, acoustic transmitters that can send a limited amount of data and be used for gathering positional data, or a combination of the two.
Biologgers using acceleration-derived measures, such as overall dynamic body acceleration (ODBA) and vectorial dynamic body acceleration (VeDBA), have been used to produce estimates of activity and metabolism in a range of marine organisms. The data obtained have been used, for example, to identify foraging periods and calculate the energy budgets of marine birds and pinnipeds (Wilson et al. 2006; Shepard et al. 2008; Gleiss et al. 2011; Qasem et al. 2012; Brown et al. 2013; Williams et al. 2020). Moreover, a combination of accelerometer and magnetometer data has been used to reconstruct the movement paths taken by animals via dead reckoning, without requiring the additional cost of a telemetry array (Wilson et al. 2007; Bidder et al. 2012b; Manos et al. 2019). Thus far, however, this application of biologgers has largely been limited to organisms for whom there is a clearly detectable signal of locomotion (such as strides, wing or tail beats), or when it is possible to simultaneously measure speed directly. Many of these studies also periodically use verified positions to “reset” the errors that accumulate during location estimation (Wilson et al. 2007; Shiomi et al. 2008; Mitani et al. 2010; Bidder et al. 2015; Gunner et al. 2021).
While there are currently a number of commercially available biologgers, the costs of these tags may be prohibitive for some researchers and the sensor fits may not be appropriate for all study subjects and questions (Weaver et al. 2021). The recent proliferation of small, programmable microcontrollers and a burgeoning open-source hardware and computing movement has made the creation and programming of custom electronics increasingly feasible (Wolcott 1995; Fahlbusch and Harrington 2019; Whitford and Klimley 2019). For example, the same sensor chips found in dedicated biologger designs are often available in off-the-shelf breakout boards, allowing similar data to be collected by both commercially produced and homemade logger designs. Importantly, using open-source components and building loggers personally makes it possible to build loggers that are optimized for the both the species being investigated and the questions being considered in a given study (Fahlbusch and Harrington 2019).
Decapod crustaceans have been the subjects of biotelemetry and biologging studies for some time (Wolcott and Hines 1989, 1996; Wolcott 1995; Friere and González-Gurriarán 1998; Guerra-Castro et al. 2011; Florko et al. 2021). As relatively large, slow-moving benthic organisms, many species of crabs and lobsters are attractive for such studies because drag and miniaturization concerns for logger designs are less restrictive, and the rigid carapace provides an excellent surface to affix tags without requiring surgery. Accelerometers have been used with various lobster species to determine activity patterns in different habitats (Gutzler et al. 2015; Jury et al. 2018; Carloni et al. 2021), daily rhythms (Goldstein et al. 2015), sound production (Zenone et al. 2019), and disturbance due to light or predators (Steell et al. 2020; Zenone et al. 2020).
The activity of American lobsters, Homarus americanus, has been studied extensively both in the laboratory and in the field. Traditional acoustic telemetry methods have been used to determine their walking speed and biological rhythms in the field (Golet et al. 2006; Carloni et al. 2021), as well as their homing abilities (Scopel and Watson 2021), home range (Scopel et al. 2009), seasonal movements (Goldstein and Watson 2015), and interactions with lobster traps (Watson et al. 2009). Recently, Jury et al. (2018) demonstrated that acceleration data, once calibrated against a measurement of true distance traveled, can be used to estimate walking speed and distance traveled by a lobster. We sought to follow this approach using a custom biologger to obtain information about the behavior of lobsters moving freely in their natural habitat.
Heart rate (HR) is a parameter of particular interest in studies of crustacean physiology and behavior, because it provides an excellent index of activity and metabolism (McMahon 1999; McGaw and Reiber 2015). The HR of lobsters increases during locomotion (Guirguis and Wilkens 1995; O'Grady et al. 2001; Rose et al. 2001; Chabot and Webb 2008), while brief episodes of bradycardia, that are characteristic of a startle response, can be used as an indication that they detect a novel event or stimulus (Florey and Kriebel 1974; Guirguis and Wilkens 1995; McMahon 1999; Jury and Watson 2000; Dufort et al. 2001; Burnovicz et al. 2009; McGaw and Nancollas 2021). Decapod functional state (e.g., activity levels or degree of arousal) can also be estimated from cardiac activity patterns, as can responses to stressful environmental conditions (Fedotov et al. 2002; Styrishave et al. 2003; Shuranova et al. 2006; Udalova et al. 2012; McGaw et al. 2018). Biologgers capable of measuring both acceleration and HR simultaneously are now available for use in crustaceans (McGaw et al. 2018; Steell et al. 2020), and the combination of both types of data may allow for more accurate identification of different types of activity, as well as provide insight into the stimuli, if any, that lead to the initiation of some of their movements.
The overall goal of this project was to develop a low-cost datalogger using parts available off the shelf that could be used to learn more about the behavior of lobsters in their natural habitat. In particular, we sought to determine if we could use accelerometer and heading data to both determine how far lobsters walked, and the path they took. In addition, by adding a sensor to monitor heart rate, we aimed to record, for the first time, how the heart rate of lobsters fluctuated during normal behavior in the wild and how it was related to their locomotor activity. Finally, to gain insight into “why” they walked when they did, we used a combination of bradycardia episodes and acceleration data to determine how often movement bouts were initiated in response to external stimuli.
Methods
Development of datalogger
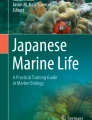
We built and tested several Arduino-based dataloggers of slightly different configurations, all based around ATMega 32u4 chipsets (using various breakout boards from Adafruit (New York, NY) and Sparkfun (Niwot, CO)), using real-time clock modules to provide time stamps, and saving the data to a microSD card for analysis. The final design used Adafruit Feather 32u4 Adalogger and DS3231 real-time clock boards, along with an LSM303DLHC accelerometer and digital compass chip (STMicroelectronics, Geneva, Switzerland) to provide measurements of triaxial acceleration and direction. A TCRT5000 infrared emitter/detector pair (Vishay Semiconductors, Malvern, PA) was used to measure lobster heartbeats via photo-plethysmography (Depledge 1984), and additional environmental sensors, such as temperature and light, were also included in the package (Fig. 1; Online Resource 1; full specifications and code available at https://github.com/gutzler/C-HAT). The logger was powered by a 3.3 V lithium polymer battery and housed inside various aluminum or plastic watertight enclosures. This system, which we refer to as the Crustacean Heart and Activity Tracker (C-HAT), recorded data in CSV format at 5 Hz and had a typical battery life in excess of 48 h. Each C-HAT was non-invasively affixed to the dorsal carapace of a lobster, above the heart, using zip ties, duct tape, and cyanoacrylate superglue. The loggers used in the field experiment were housed in aluminum enclosures with dimensions of 87 × 35 × 30 mm and a weight of approximately 170 g in air. Just enough neoprene wetsuit material was added to the cases so that they were roughly neutrally buoyant underwater.

Crustacean Heart and Activity Tracker (C-HAT) dataloggers. A: Circuit diagram for the C-HAT (created using Fritzing 0.9.3, www.fritzing.org). B: View of the circuits packaged in a housing. C: An 81 mm carapace length (CL) lobster in the field fitted with a C-HAT
Laboratory testing
Prior to deployment in the field, the logger designs were tested in the laboratory at the University of New Hampshire’s Coastal Marine Lab in New Castle, New Hampshire during 2018 and 2019. The primary goals of these trials were to ensure the loggers did not impair lobster movements, and determine the threshold acceleration values that, when exceeded, indicated lobsters were moving. Furthermore, video observations of the trials allowed us to verify that the cardiac sensor was able to detect episodes of bradycardia, indicative of startle responses in response to stimuli (McMahon 1999; Jury and Watson 2000; Burnovicz et al. 2009). A startle response was identified as a brief decrease in heart rate of at least 20% (bradycardia), which was also often followed by an increase in heart rate (Online Resource 2). Previous studies have demonstrated that these startle responses are reliable indicators that lobsters have detected something novel in their environment, such as a change in temperature or salinity (Guirguis and Wilkens 1995; Jury and Watson 2000; Dufort et al. 2001). Our laboratory trials were designed to show that startle responses also took place when lobsters encountered other lobsters.
These laboratory tests also allowed us to verify that a Movement Index (MI), similar to that used by the accelerometer transmitters used by Jury et al. (2018), was a reliable indicator of activity. The MI was calculated by differentiating each of the three acceleration axes via the Savitzy–Golay method, and combining these values using the following equation:
Trials were conducted in 2 m diameter circular tanks, with gravel substrate and a single shelter, fed with ambient flowing seawater. Time lapse video cameras (TLC200 Pro, Brinno Inc., Taipei City, Taiwan) were used to record the trials, with red lights illuminating the tanks at night. Lobsters (n = 10, 73–96 mm carapace length (CL)) equipped with C-HATs were either left alone in the tank (n = 5), or shared the tank with a larger lobster (n = 5; larger lobsters 89–98 mm CL) for 24 h. At the conclusion of each trial, the loggers were removed from the lobsters, data were downloaded, and the tanks were cleaned and prepared for the next trial.
Field testing
Fourteen lobsters fitted with C-HATs were released into an acoustic telemetry array off the coast of New Castle, New Hampshire in July through September of 2019 (Fig. 2). The acoustic array was configured as a VEMCO Positioning System (VPS) that consisted of 16 VR2W receivers and two sync tags (Innovasea, Bedford, NS) operating at 69 kHz. Each C-HAT was equipped with a VEMCO V9-coded acoustic tag pinging every ~ 3 min for tracking using the VPS system, along with a Sonotronics CT-82 continuous pinger (Sonotronics, Tucson, AZ) operating at 75 kHz to enable divers to locate and recover the logger after 1–2 days. Lobsters were collected from standard lobster traps fished in the array, and the C-HATs were immediately affixed to the lobsters onboard the vessel. The whole tagging procedure took less than 20 min and then lobsters were released by lowering them to the bottom inside a lobster trap with an open panel so they could readily escape. Divers recovered the tagged lobsters 24 to 48 h after they were released, using a handheld hydrophone (Underwater Diver Receiver, Sonotronics, Tucson, AZ) to locate them. After recapture, the C-HATs were removed and the lobsters were released.

Study site along the New Hampshire coast, showing the locations of the VR2W receivers that comprised the VPS array, with representative tracks of two lobsters that were fitted with C-HATs and released within the array. Bathymetry data from UNH CCOM (http://ccom.unh.edu/project/wgom-bathbackscatter)
A data sonde (YSI Model 6600, YSI Inc., Yellow Springs, OH) was also deployed in the array to record water temperature and salinity during the field tests. Water temperatures ranged from 10 to 18 ºC (mean 14º), and salinities ranged from 27 to 32 (mean 29).
Analyses
Data from the C-HATs were imported into LabChart 8.1 (ADInstruments, Colorado Springs, CO). In LabChart, the recorded acceleration values were used to calculate MI, ODBA (Wilson et al. 2006), VeDBA (Qasem et al. 2012), and the change in forward/backward acceleration (Xdiff, Jury et al. 2018). The Cyclic Measurements tool was used to calculate HR from the output of the infrared heartbeat sensor. These data, along with compass headings, were averaged every 1 min and then exported as CSV files for further analyses. For some analyses, HR values were normalized as a percentage of the maximum HR seen in each lobster to allow comparisons between individuals with different resting HR values.
Comparisons of lobster movements in the laboratory, recorded with time lapse video cameras, with C-HAT data obtained simultaneously, indicated that when the MI was < 0.6, lobsters were not moving. Therefore, we used this MI value as a threshold to determine the onset of bouts of activity. Activity bouts were periods of time when a lobster went from being inactive, for at least one minute (MI < 0.6), to active for at least one minute (MI ≥ 0.6), and then back to being inactive. The proportion of bouts of activity that were associated with startle responses that occurred immediately preceding, or within the first 10 s of the movement bout, was calculated for each lobster. A chi-squared test of independence was used to compare the proportion of activity bouts associated with startle responses between lobsters in a lab tank alone, lobsters in a lab tank with another lobsters, and lobsters released in the field.
VPS data were processed by Innovasea to yield a series of positional fixes for each lobster during its time in the array. These data were filtered in R 4.0.4 (R Core Team 2018) and RStudio 1.1.463 (R Studio Team, 2016) to remove potentially erroneous locations by removing all positions with a Horizontal Position Error (HPE) of greater than 10. Comparison of HPE values with the known positions of receivers and sync tags suggested a HPE of 10 corresponded to a positional error of ~ 16 m, and a HPE of 6 corresponded to a positional error of ~ 10 m (Coates et al. 2013; Smith 2013). This threshold was set to reduce positional error while retaining regular positional fixes (Biesinger et al. 2013).
Lobster movements were analyzed in ten-minute time steps, allowing comparisons to be made between the continuous record from the C-HATs and the intermittent (3–5 min) positional fixes from the acoustic array. Linear interpolation between positional fixes was used to predict the location of each lobster during those ten-minute steps, if no VPS position was obtained. To construct a regression linking acceleration to lobster movement, the VPS dataset was further filtered to include only ten-minute periods for which at least one VPS position with an HPE < 6 was recorded, and acceleration values from the C-HAT indicated that the lobster was both upright and not stationary (thus more likely to be walking). To calibrate the relationship between acceleration and distance, the values of MI, ODBA, VeDBA, and Xdiff measured by the C-HAT for each of these periods were used to create linear regressions against the distance traveled, as reported by the VPS (Bidder et al. 2012b). The size of this training dataset varied, depending on the threshold used to distinguish periods of movement from periods of remaining stationary (no threshold values for ODBA and VeDBA; Xdiff ≥ 0.2; MI ≥ 0.6). After filtering, the dataset yielded 510 ten-minute segments for ODBA and VeDBA, 442 segments for Xdiff, and 176 segments for MI. To compare the performance of the different indices of acceleration in predicting the distance traveled during each ten-minute time step, the relative absolute error (RAE) between the predicted distances from the regressions and the actual distances reported by the VPS was calculated in R using the Metrics package (Hamner and Frasco 2018).
Lobster movement paths were reconstructed using a dead reckoning algorithm in ten-minute time steps. Using the coordinate system established by the VPS data, with northings and eastings given in m, each lobster’s track reconstruction was started at the x,y position at which it was first reported by the VPS data. For each ten-minute time step, if the mean MI for the period was ≥ 0.6, the lobster was considered to be moving, and the corresponding distance moved for the MI value was calculated using the regression between MI and VPS movement. This distance was combined with the mean compass heading to calculate a new x,y position for the lobster at the end of the time step. If the MI was < 0.6, the lobster was considered stationary, and the position from the previous time step was left unchanged. After reconstructing the path taken during the full period for which C-HAT data were obtained, the x,y coordinates were plotted alongside the coordinates provided from the VPS data, and the dead reckoning error (linear distance between reconstructed position and “true” position reported by the VPS) was calculated and summed across all lobsters.
Regressions were constructed in R and RStudio, and path reconstruction was conducted in Microsoft Excel.
Results
Lab testing
Observations of the lobsters fitted with C-HATs indicated that their movements were not obviously impaired by the loggers, despite their large size relative to the animals (loggers were substantially in excess of the so-called 5% rule (Portugal and White 2018)). Furthermore, it was clear upon viewing videos of lobsters alongside C-HAT data, that when lobsters began to move, their HRs increased (Online Resource 1). Startle responses, as indicated by brief periods of bradycardia, were also clearly evident and they most often occurred as a reaction to identifiable stimuli, such as approaches by other lobsters or lights being turned on or off (Online Resource 2).
Field testing
Fourteen lobsters were released in the area surrounded by the VPS array and 12 were recovered. Of these 12, 6 C-HATs performed properly and recorded useable movement data, and in 5 of these 6 good heart rate data were also obtained. The other deployments failed due to water intrusion into the housing or logger malfunctions, such as disconnected wires or the heart sensor becoming misaligned on the carapace. The six successful trials yielded 207 h of VPS tracking data and 182.6 h of C-HAT logger data (155.6 h of which included heart rate data) (Table 1). At least three lobsters entered traps while equipped with C-HATs, suggesting the loggers did not impair their mobility or alter typical behaviors. Two lobsters that were recovered were found in traps (one actively fishing, one derelict), and one lobster that was reported, but not recovered, was captured in a trap by a local fisherman and subsequently released away from the array.
Lobster heart rates
To the best of our knowledge, the recordings of HR obtained with the C-HATs are the first recordings of the HR of freely moving lobsters in the wild (Table 2). In general, the HR of lobsters ranged from ~ 60 beats per minute (bpm) at rest to ~ 80–90 bpm when active (Fig. 3). When they were not moving, or moving very little (< 2 m 10 min−1; < 12 m hr−1), their HR was 60.1 ± 15.5 bpm (mean ± SD), while when they were moving at a rate of 10–12 m 10 min−1 (60–72 m hr−1), their HR was 81.6 ± 10.2 bpm (mean ± SD). These HR values are broadly comparable to values recorded from lobsters voluntarily walking on a treadmill in the laboratory (O'Grady et al. 2001). There was generally a good correlation between the distance lobsters moved and HR (Fig. 3A), as well as HR and MI (Fig. 3B), although HR tended to stay elevated for a period after lobsters stopped walking (Fig. 3C). It should also be noted that, while their HR tended to increase the faster they walked, HR tended to plateau after they reached a certain speed (Fig. 3A). Four of the six lobsters exhibited periods of cardiac pausing during the recordings. Such pauses are typical of unstressed lobsters and suggest the lobsters did not find the attached C-HAT to be a continuous stressor (McMahon and Wilkens 1972; McMahon 1999).

Relationships between lobster activity and HR. A: Percent of lobster maximum HR as a function of distance traveled in ten minutes, as measured by the VPS (n = 5 lobsters). B: Percent of the maximum HR for each lobster as a function of 10 min average MI (n = 5 lobsters). Note the clearer relationship between HR and increasing activity than is shown by the distance traveled. C: 12 h of example HR (red), MI (blue), and VPS (black) data from Lobster 3. Values are all 10 min means. Note that HR appears to peak shortly after the lobster reaches maximal activity, then takes some time to return to baseline
Startle responses
Data obtained in the laboratory revealed that a startle response associated with the initiation of a movement bout is most likely an indicator that the movement took place in response to an external stimulus, such as lights turning on or off, or an interaction with another animal. When lobsters were in a tank alone, a startle response was associated with the initiation of 22.7 ± 4.5% of movement bouts (mean ± SE, n = 5). In contrast, when a lobster with a C-HAT was held in a tank with a larger lobster, about twice as many (55.2 ± 9.8%, mean ± SE, n = 5) of their movement bouts were associated with a startle response. These proportions were significantly different between conditions (chi-square test, χ2 = 149.23, df = 2, p < 0.001). These data can therefore be used to interpret what might cause lobsters to move in the field. In freely moving lobsters in the field, 33.1 ± 2.5% (mean ± SE, n = 5) of movement bouts were associated with a startle response (Fig. 4).

Startle response associated with the initiation of movement in a freely moving lobster in the wild (Lobster 2). The lobster was sitting still facing northeast (1), then was startled by something (2), it turned left to face north (3), then moved forward (X accel increased) (4), rapidly backed away (X accel decreased) (5), and finally moved forward and took a slight left turn to walk away (6). X-axis labels are local standard time
Acceleration relationships with movement
The ten-minute means of ODBA, VeDBA, and MI each displayed a significant relationship with the distance a lobster moved, as determined by the VPS (Table 3, Fig. 5; Online Resource 3). The index which performed best at predicting the distance a lobster traveled was the MI (RAE = 0.816), while the worst-performing index was Xdiff (RAE > 1.0). The MI was therefore used to estimate the distance traveled in each time step for dead reckoning path reconstructions. To further improve the predictive performance, we also calculated the RAE for a version of the MI that also considered a given lobster’s heart rate. When the heart rate was less than 70% of the maximum recorded for that individual (indicating relatively less activity), the distance traveled in that ten-minute time step was assumed to be to 0. The inclusion of the HR data improved dead reckoning performance by roughly 6% (RAE = 0.768).

The relationship between the four different accelerometer-based indices of activity and the distance lobsters traveled in ten minutes, as measured by the VPS. MI = Movement Index (this study); Xdiff = change in X-axis acceleration (Jury et al. 2018); ODBA = Overall Dynamic Body Acceleration (Wilson et al. 2006); and VeDBA = Vectorial Dynamic Body Acceleration (Qasem et al. 2012). Data from each lobster (n = 6) are represented by points of a different color. Dashed lines indicate threshold values for determination of activity. Of the four indices, MI showed the best relationship between acceleration and distance traveled
Dead reckoning
The regression between MI and distance moved reported by the acoustic array (Table 2) was used, in combination with the mean compass heading reported by the C-HAT, to calculate the distance and direction traveled per ten-minute time step, and thus recreate the path taken by lobsters within the array throughout the deployment (Bidder et al. 2015). The reconstructed tracks broadly agreed with the tracks recorded by the VPS (Fig. 6). The overall length of the reconstructed tracks was more consistent with the VPS measurements than were the headings, leading to cases where the final positions of the lobsters were substantially different between the reconstruction and the true location (Fig. 7). This may have been due to improper calibration of the digital compass, or issues with tilt compensation (Gunner et al. 2021).

A comparison of lobster movement paths recorded by the VPS and those reconstructed via dead reckoning, using MI-based calculations of distance traveled and headings recorded by C-HAT loggers. Circles and solid lines show tracks determined by the VPS array, while tracks reconstructed via dead reckoning using C-HAT data are illustrated with triangles. C-HAT positions are plotted every minute and VPS positions are plotted every ten minutes; dashed lines indicate interpolated positions for periods of time during which the VPS was unable to determine a position

Comparisons of VPS acoustic tracking and C-HAT dead reckoning reconstructions of lobster movements. A Cumulative distance traveled by lobsters after their release as measured by C-HAT dead reckoning (solid line) and VPS telemetry (dashed line) over the length of each deployment. B Dead reckoning error, expressed as the linear distance between the “true” VPS position and the position determined by C-HAT dead reckoning, as a function of time in each deployment. Note the relatively close correspondence between the methods for distance traveled, suggesting that the larger discrepancies in the dead reckoning error may be due to compass heading error rather than errors in determining distance traveled. The greatest dead reckoning error occurred in a deployment (Lobster 6) for which the heart rate data were unusable, leading to less confidence in determining whether the lobster was moving or stationary in the dead reckoning reconstruction
Discussion
Biologging is a promising technique for the study of animals in the wild and has gained increasing prominence over the past decade (Wilmers et al. 2015). The present study adds to this body of literature by showing that a movement index (MI), based on acceleration measurements, can be used to make good estimates of the distance traveled by freely moving lobsters in the wild. Further, we demonstrated that it was possible to use MI and heading data to reconstruct the paths taken by lobsters in their natural habitat, and these could be further improved by incorporating HR data into the algorithm (Laske et al. 2021).
Advantages and disadvantages of the C-HAT approach
The datalogger design described here is capable of continuously recording data, rather than only logging, or transmitting, information in periodic bursts. They can therefore capture short periods of tachycardia or bradycardia that are often missed by commercially available loggers (which often function in bursts or when triggered by events). In decapods these brief, rapid changes in HR are important to record because they often provide useful information about an animal’s behavioral state and activity level (McMahon and Wilkens 1972; Chabot and Webb 2008; Udalova et al. 2012; McGaw et al. 2018; McGaw and Nancollas 2021). The data recorded by the C-HAT are at an intermediate sampling frequency of 5 Hz, which is less than many commercial biologgers (often up to 100 Hz), but higher than the rate of data transmitted by telemetry tags, which are limited in sampling resolution or data complexity by transmission bandwidth (Cooke et al. 2021; Reubens et al. 2021). Presently, a drawback of C-HATs is that they can only record data for a relatively short period of time, because the battery life is ~ 50 h, and they must be recovered for subsequent downloading of the data. In addition, because the size of the logger is dictated in large part by the size of the battery needed to reach this lifespan, the C-HAT is currently limited to larger, slower-moving benthic animals, for which it is not unduly burdensome.
The current design of the C-HAT has been improved since the field tests reported here. Using plastic dive housings designed for GoPro cameras, rather than metal enclosures, has reduced the weight of the overall package to 80% of the design used for the field studies reported here, and we now use molded thermoplastic “saddles” to help the logger remain in position without the use of adhesives. The current code includes better tilt compensation for the digital compass, additional output parameters, such as tilt and roll angles, and improvements in user friendliness. Development is ongoing and will hopefully continue to provide an open-source platform for low-cost biologging of benthic organisms. The basic design is similar to that used by other open-source loggers, allowing code segments to be adapted across platforms to easily integrate new components or sensors (e.g., Gandra et al. 2015; Beddows and Mallon 2018; Fahlbusch and Harrington 2019).
Further development and miniaturization of the technology, such as customized circuit boards and housings, could increase the range of species with which such devices may be used, as well as improving sampling frequency and battery life (Holton et al. 2021). Importantly, the use of open source and commercially available parts makes the C-HAT a cheap and flexible option for studies of large and slow-moving benthic organisms such as lobsters. The total cost of a C-HAT is ~ $80 USD, which is comparable to the HOBO Pendant G accelerometers which have been used in other studies of benthic arthropods (Goldstein et al. 2015; Jury et al. 2018; Owings et al. 2020). Similarly, the design and code are easily modified to accept other inputs, from either analog sensors or those using digital communications protocols. The low-cost, “do it yourself” approach to logger construction used here will hopefully provide a platform for further innovation and a broader availability of biologging techniques for future studies (Weaver et al. 2021). For example, we recently built and successfully tested a sensor which can be added to a C-HAT that allows us to log the feeding activity of lobsters (Guzler, unpublished data).
The heart rates of freely moving lobsters in the wild
Overall, when the lobsters were active, as determined by accelerometry (MI ≥ 0.6), their HR was 70.0 ± 16.7 bpm (mean ± SD), a nearly 20% increase over HRs when inactive (59.2 ± 14.3 bpm). However, during periods of high activity (MI ≥ 1.2), when HRs typically peaked, HRs were 82.8 ± 12.6 bpm, which was a 125% increase over their minimum observed resting levels of ~ 30 bpm (Table 2). These values are consistent with previous data obtained in the laboratory at similar temperatures. When lobsters were allowed to voluntarily walk on treadmills (Guirguis and Wilkens 1995; O'Grady et al. 2001), or running wheels (Chabot and Webb 2008), their HRs ranged from ~ 30–40 bpm at rest to 80–90 bpm when active. Lobsters on walking wheels had slightly lower HRs at rest (25–35 bpm), most likely because those experiments were conducted for several days at a time, so the lobsters had time to fully acclimate to the experimental conditions. In contrast, lobsters that were forced to walk on treadmills (Rose et al. 2001), had slightly higher HRs at rest than those that walked voluntarily at speeds of their choosing. Importantly, in all cases, lobster HRs tended to peak around 80–90 bpm, which is very consistent with the data we obtained from freely moving lobsters in their natural habitat and at temperatures similar to those used in the laboratory studies (conducted at 13–17 ºC depending on the study).
Although in all cases, lobster HRs increase upon the initiation of movement, the extent to which HRs correlate with walking speed varies considerably between studies. This is likely due to the range of walking speeds examined and whether lobsters are forced to walk at certain speeds on treadmills, or free to pick their own speed. In the Rose et al. (1998) study, lobsters were forced to walk at speeds ranging from 1.7 to 8 m min−1 and HRs did not correlate well with walking speed. However, these rates of walking are relatively fast compared to those obtained from lobsters that are free to pick their own speed of locomotion, whether on a treadmill or in the field. Chabot and Webb (2008) found that when lobsters walked at slow to moderate speeds HR went up consistently with increased rates of locomotion, while O'Grady et al. (2001) found lobsters voluntarily walked at speeds ranging from 0.1 to 2.5 m min−1 and, in 3/5 of the lobsters tested, there was a significant correlation between HR and walking speed. In the current study, there was also a good correlation between HR and walking speed, but only when the rate of locomotion was relatively slow. Once lobsters moved more than ~ 12 m 10 min−1 (1.2 m min−1), their HRs started to reach a plateau and remain elevated, but relatively constant, as walking speed increased (Fig. 3A, B). This tendency of the HR to reach a plateau explains why, in the Rose et al. (1998) study, in which lobsters were forced to walk relatively fast, the relationship between HR and walking speed was poor. It is also likely that the apparent inability of lobsters to increase their cardiac output beyond a certain point has physiological implications for how fast, or for how long, they can walk. Because HRs increase along with metabolic rates in warmer water, these data might also be important when considering the thermal preferences of lobsters and how their habitats are being impacted by climate change.
In general, there was a strong correlation between a lobster’s MI and HR, more so than between HR and distance traveled per time segment (Fig. 4). This was probably due to the fact that lobsters were moving, but in a way that did not involve substantial lateral displacement, so their activity was not being registered as movement by the telemetry array. C-HATs or other accelerometers offer a way to quantify activity occurring below the detection thresholds of acoustic telemetry arrays, potentially providing a means to measure behaviors that do not involve displacements, such as shelter maintenance. In either case, it is apparent that while lobster HRs increased with their speed of walking, they tended level off around a value that was about 80% of the maximum observed (Fig. 3). At the temperature conditions present when the field experiment occurred, this level was ~ 80 bpm.
In the 5 lobsters for which cardiac data were obtained, the highest HRs were generally observed immediately after lobsters were released, when they were likely experiencing post-handling stress (Online Resource 4). Handling elevates the HR of decapods, and it can remain elevated for many hours thereafter (McGaw and Nancollas 2018, 2021). Though this makes it challenging to use HR as an indication of movement or stimulus recognition during the period of elevated HR following handling, it does provide an upper bound for HR in each animal. Determining the upper bound of HR using the rates seen immediately subsequent to an animal’s release facilitates the process of normalizing HR across individuals by expressing them as a percent of the maximum rate.
The lowest mean HRs were recorded when the lobsters were expressing a series of bradycardia events or cardiac pauses, that typically occur when they are resting, cleaning their gills, or startled (Young and Coyer 1979; Guirguis and Wilkens 1995; Hokkanen and DeMont 1997; Jury and Watson 2000; Dufort et al. 2001; Chabot and Webb 2008). Both cardiac pauses and startle responses were observed in our field data. The duration of episodes of bradycardia linked to resting or gill cleaning is typically longer (up to a minute or more, termed cardiac pausing) than that associated with cardiac startle responses, which allows startle responses to be distinguished in the data (McMahon and Wilkens 1972; McMahon 1999; Jury and Watson 2000). As seen in the laboratory testing, a cardiac startle response, followed by initiation of a bout of movement, likely indicates that a lobster moved in response to an encounter with another animal. Movements in response to external stimuli may therefore be distinguished from self-directed movements and, just as the inclusion of heart rate data improved the track reconstruction, cardiac data might help identify movement bouts that are spontaneous versus triggered by external stimuli.
Using acceleration data to measure distance traveled by a lobster
In a previous study in the same general area, Golet et al. (2006) used a high-resolution telemetry system (Vemco VRAP) to continuously track freely moving lobsters within a large mesocosm. They found that at night, when lobsters were most active, they moved at a rate of 40–60 m hr–1 (6–10 m 10 min−1, 0.5–1 m min−1). The results from this study, whether obtained with the VPS system or C-HATs, are consistent with those data. When the lobsters we tracked were active they typically moved up to ~ 60 m hr−1 (10 m 10 min−1), but occasionally walked 100 m hr−1, or more.
Work by Jury et al. (2018) demonstrated, in the laboratory, that data from accelerometers can be used to calculate the distance traveled by a lobster. They captured time lapse videos of lobsters fitted with accelerometers walking around in a 2 m diameter tank and then plotted the relationship between distance moved, according to videos, and the change in the x-axis acceleration (Xdiff). In the present study, we took a similar approach, by comparing the distance calculated using a variety of accelerometer-based indices of activity with the distances returned by the VPS array. Surprisingly, the index used by Jury et al. (2018) provided the least accurate distance calculation (Fig. 5). This is likely due to the fact that an unadorned fiberglass tank, such as the one they used for their study, may be insufficient to replicate the influence of the variable terrain of their natural habitat on measures of acceleration (Bidder et al. 2012a, 2017). However, in the trials conducted by Jury et al. (2018), the distances lobsters traveled were measured directly, on a minute-to-minute basis, using video analysis. Thus, the estimates produced via that method may actually be a more accurate measure of distances moved during highly variable short paths, while the field data collected by the VPS that were used to calibrate the C-HATs can only resolve lateral displacements of at least several meters, due to the slow sampling frequency and positional uncertainty of the VPS system. In future, we recommend both better calibration of the digital compass modules and further refinements in terms of sensor thresholds, or post-processing of data, to determine when lobsters are relatively stationary (Patin et al. 2020). If using laboratory calibrations, rather than field movement data, larger tanks that include a more varied and natural substrate should be used to obtain more accurate estimates of distance traveled.
Variations in how loggers are positioned and affixed on animals can alter the measured acceleration signal of dynamic acceleration, as can logger sampling frequency and how the resulting data are processed (Halsey et al. 2008; Shepard et al. 2008; Wilson et al. 2020). The MI used here was designed as a means of simplifying the analytical process for a logger with a comparatively low sampling frequency. Instead of smoothing the data for each acceleration axis for 1–3 s and then subtracting it from the unsmoothed data, as is done for ODBA and VeDBA (Wilson et al. 2006; Shepard et al. 2008; Qasem et al. 2012), the MI differentiates each axis over a three-sample window (i.e., 0.6 s when logging at 5 Hz). This has the effect of extracting short-term changes in acceleration, which allows better resolution of periods of activity when the signal of locomotion is not as distinct as in animals with clear wing or tail beats. At its simplest, the MI calculation can be done on the change in acceleration between individual measurements, rather than differentiating, effectively serving as a triaxial variant of the Xdiff used by Jury et al. (2018). Calculations such as this can be accomplished in a simple spreadsheet, without requiring complex data-processing routines or any programming knowledge.
Recreating lobster tracks with C-HAT data and a dead reckoning algorithm
While acoustic telemetry has been used extensively to track marine species, the fixed arrays used are somewhat limited in size (due to the cost of each receiver) and, depending on the location of the animal in the array, data acquisition can be sporadic because a minimum of three receivers must detect a given “ping” to triangulate the position of the animal in question (van der Knaap et al. 2021). For example, in this study, there was a five-hour gap in the VPS data for one of the lobsters because it wandered just outside the array. In contrast, datalogging tags continuously collect acceleration and heading data, and these data can then be used, as demonstrated in this study, to recreate the path taken by the animal in question (Fig. 6). While errors accumulate using the dead reckoning approach if known reference fixes are not available, the dead reckoned data may give insights on what behaviors are being expressed by an animal, based on path tortuosity or turning angles (Wilson et al. 2007; Bidder et al. 2015).
A hybrid approach that could be used to obtain continuous, accurate tracks of freely ranging animals over a large area would be to use acceleration telemetry tags (such as the VEMCO V13AP) that also transmitted heading data, in combination with a large array of VR2W receivers. This approach would overcome the drawbacks off both VPS arrays and loggers attached to animals. The VPS array could provide accurate positional fixes while the animals in question were within the array, and then the heading and acceleration data could be used with a dead reckoning algorithm, to track animals when they were only within range of one of the acoustic receivers. Furthermore, with this approach, animals would not have to be retrieved by divers. However, this approach could only be used for tracking and not to obtain other behavioral and physiological data, such as HR.
The behavior of lobsters in their natural habitat
Our ultimate goal is to be able to use C-HATs to help us to more fully understand the daily life of lobsters in their natural habitat. Some of the data obtained in this study provide insight into how this could be achieved. For example, using a combination of acceleration and heart rate data, we were able to identify spontaneous bouts of activity versus those elicited by environmental stimuli, such as agonistic interactions with conspecifics or predators. Previous studies have shown that the presence of predatory groundfish can alter the habitat area used by lobsters (McMahan et al. 2013), and Golet et al. (2006) found that evictions by other lobsters were responsible for almost half of their departures from shelters. The data from this study are consistent with this pattern. In the lab trials, where a C-HAT-equipped lobster was paired with another larger lobster, a cardiac startle response was associated with the onset of half the recorded movement bouts, while lobsters in tanks alone had startle responses associated with the onset of roughly a quarter of their movement bouts. In the field, a third of movement bouts were associated with cardiac startle responses. If, based on the data from the lab trials, we accept that startle responses typically occur when lobsters encounter something novel in their environment, such as another lobster or a sudden environmental change, then the data obtained from this study indicate that a third of the bouts of lobster movements are not purely self-directed, but occur in response to aversive stimuli or potential conflict (Fig. 4).
Much remains to be learned about the stimuli and cues that lobsters use to guide their behaviors but now, with the availability of inexpensive and easy to construct biologgers such as the C-HAT, scientists have an unprecedented opportunity to monitor the habits of these iconic animals. The flexibility of the home-built and open-source platform allows it to be readily adapted to address a variety of questions, and improvements to the design and code can be implemented rapidly. Devices such as the C-HAT will hopefully help to bridge the gap between controlled, easily observed, studies in the laboratory and field research, and in doing so, provide a more complete picture of the daily lives of marine invertebrates.
Data availability
Datasets used in this work are available from the corresponding author upon reasonable request. C-HAT schematics and logger code are available at: https://github.com/gutzler/C-HAT
References
Beddows PA, Mallon EK (2018) Cave Pearl data logger: a flexible Arduino-based logging platform for long-term monitoring in harsh environments. Sensors 18:530. https://doi.org/10.3390/s18020530
Bidder OR, Qasem L, Wilson RP (2012a) On higher ground: how well can dynamic body acceleration determine speed in variable terrain? PLoS ONE 7:e50556. https://doi.org/10.1371/journal.pone.0050556
Bidder OR, Soresina M, Shepard ELC, Halsey LG, Quintana F, Gómez-Laich A, Wilson RP (2012b) The need for speed: testing acceleration for estimating animal travel rates in terrestrial dead-reckoning systems. Zoology 115:58–64. https://doi.org/10.1016/j.zool.2011.09.003
Bidder OR, Walker JS, Jones MW, Holton MD, Urge P, Scantlebury DM, Marks NJ, Magowan EA, Maguire IE, Wilson RP (2015) Step by step: reconstruction of terrrestrial animal movement paths by dead-reckoning. Mov Ecol 3:23. https://doi.org/10.1186/s40462-015-0055-4
Bidder OR, Goulding C, Toledo A, van Walsum TA, Siebert U, Halsey LG (2017) Does the treadmill support valid energetics estimates of field locomotion? Integr Comp Biol 57:301–319. https://doi.org/10.1093/icb/icx038
Biesinger Z, Bolker BM, Marcinek D, Grothues TM, Dobarro JA, Lindberg WJ (2013) Testing an autonomous acoustic telemetry position system for fine-scale space use in marine animals. J Exp Mar Biol Ecol 448:46–56. https://doi.org/10.1016/j.jembe.2013.06.007
Börger L, Bijleveld AI, Fayet AL, Machovsky-Capuska GE, Patrick SC, Street GM, Vander Wal E (2020) Biologging special feature. J Anim Ecol 89:6–15. https://doi.org/10.1111/1365-2656.13163
Brown DD, Kays R, Wikelski M, Wilson R, Klimley AP (2013) Observing the unwatchable through acceleration logging of animal behavior. Anim Biotelem 1:20
Burnovicz A, Oliva D, Hermitte G (2009) The cardiac response of the crab Chasmagnathus granulatus as an index of sensory perception. J Exp Biol 212:313–324. https://doi.org/10.1242/jeb.022459
Carloni JT, Goldstein JS, Watson WH III (2021) Movements of egg-bearing American lobsters Homarus americanus during late stage brooding and hatching. Mar Ecol Prog Ser 661:163–173. https://doi.org/10.3354/meps13629
Chabot CC, Webb LK (2008) Circadian rhythms of heart rate in freely moving and restrained American lobsters, Homarus americanus. Mar Freshw Behav Phy 41:29–41
Coates JH, Hovel KA, Butler JL, Klimley AP, Morgan SG (2013) Movement and home range of pink abalone Haliotis corrugata: implications for restoration and population recovery. Mar Ecol Prog Ser 486:189–201. https://doi.org/10.3354/meps10365
Cooke SJ, Hinch SG, Wikelski M, Andrews RD, Kuchel LJ, Wolcott TG, Butler PJ (2004) Biotelemetry: a mechanistic approach to ecology. Trends Ecol Evol 19:334–343. https://doi.org/10.1016/j.tree.2004.04.003
Cooke SJ, Lennox RJ, Brownscombe JW, Iverson SJ, Whoriskey FG, Millspaugh JJ, Hussey NE, Crossin GT, Godley BJ, Harcourt R (2021) A case for restoring unity between biotelemetry and bio-logging to enhance animal tracking research. FACETS 6:1260–1265. https://doi.org/10.1139/facets-2020-0112
Depledge MH (1984) Photoplethysmography – a non-invasive technique for monitoring heart beat and ventilation rate in decapod crustaceans. Comp Biochem Phys A 77:369–371
Dufort CG, Jury SH, Newcomb JM, O’Grady DF III, Watson WH III (2001) Detection of salinity by the lobster, Homarus americanus. Biol Bull 201:424–434
Fahlbusch JA, Harrington KJ (2019) A low-cost, open-source intertial movement GPS logger for eco-physiology applications. J Exp Biol 222:211136. https://doi.org/10.1242/jeb.211136
Fedotov VP, Kholodkevitch SV, Strochilo AG (2002) Peculiarities of cardiac activity in the crayfish Astacus astacus in different functional states. J Evol Biochem Phys 38:45–56
Florey E, Kriebel ME (1974) The effects of temperature, anoxia and sensory stimulation on the heart rate of unrestrained crabs. Comp Biochem Phys A 48:285–300
Florko KRN, Davidson ER, Lees KJ, Hammer LJ, Lavoie M-F, Lennox RJ, Simard É, Archambault P, Auger-Méthé M, McKindsey CW, Whoriskey FG, Furey NB (2021) Tracking movements of decapod crustaceans: a review of a half-century of telemetry-based studies. Mar Ecol Prog Ser 679:219–239. https://doi.org/10.3354/meps13904
Friere J, González-Gurriarán E (1998) New approaches to the behavioural ecology of decapod crustraceans using telemetry and electronic tags. Hydrobiologia 371(372):123–132
Gandra M, Seabra R, Lima FP (2015) A low-cost, versatile data logging system for ecological applications. Limnol Oceanogr Meth 13:115–126. https://doi.org/10.1002/lom3.10012
Gleiss AC, Wilson RP, Shepard ELC (2011) Making overall dynamic body acceleration work: on the theory of acceleration as a proxy for energy expenditure. Methods Ecol Evol 2:23–33
Goldstein DL, Pinshow B (2006) Taking physiology to the field: using physiological approaches to answer questions about animals in their environments. Physiol Biochem Zool 79:237–241
Goldstein JS, Watson WH III (2015) Seasonal movements of American lobsters in southern Gulf of Maine coastal waters: patterns, environmental triggers, and implications for larval release. Mar Ecol Prog Ser 524:197–211
Goldstein JS, Dubofsky EA, Spanier E (2015) Into a rhythm: diel activity patterns and behaviour in Mediterranean slipper lobsters, Scyllarides latus. ICES J Mar Sci 72:i147–i154
Golet WJ, Scopel DA, Cooper AB, Watson WH (2006) Daily patterns of locomotion expressed by American lobsters (Homarus americanus) in their natural habitat. J Crustacean Biol 26:610–620
Guerra-Castro E, Carmona-Suárez C, Conde JE (2011) Biotelemetry of crustacean decapods: sampling design, statistical analysis, and interpretation of data. Hydrobiologia 678:1–15
Guirguis MS, Wilkens JL (1995) The role of the cardioregulatory nerves in mediating heart rate responses to locomotion, reduced stroke volume, and neurohormones in Homarus americanus. Biol Bull 188:179–185
Gunner RM, Holton MD, Scantlebury MD, van Schalkwyk OL, English HM, Williams HJ, Hopkins P, Quintana F, Gómez-Laich A, Börger L, Redcliffe J, Yoda K, Yamamoto T, Ferreira S, Govender D, Viljoen P, Bruns A, Bell SH, Marks NJ, Bennett NC, Tonini MH, Duarte CM, van Rooyen MC, Bertelsen MF, Tambling CJ, Wilson RP (2021) Dead-reckoning animal movements in R: a reappraisal using Gundog Tracks. Anim Biotelem 9:23. https://doi.org/10.1186/s40317-021-00245-z
Gutzler BC, Butler MJ, Behringer DC (2015) Casitas: a location-dependent ecological trap for juvenile Caribbean spiny lobsters, Panulirus argus. ICES J Mar Sci 72:i177–i184. https://doi.org/10.1093/icesjms/fsv041
Halsey LG, Green JA, Wilson RP, Frappell PB (2008) Accelerometry to estimate energy expenditure during activity: best practice with data loggers. Physiol Biochem Zool 82:396–404. https://doi.org/10.1086/589815
Hamner B, Frasco M (2018) Metrics: evaluation metrics for machine learning, https://CRAN.R-project.org/package=Metrics
Hokkanen JEI, DeMont ME (1997) Complex dynamics in the heart of the lobster Homarus americanus. Can J Zool 75:746–754
Holton MD, Wilson RP, Teilmann J, Siebert U (2021) Animal tag technology keeps coming of age: an engineering perspective. Philos T Roy Soc B 376:20200229. https://doi.org/10.1098/rstb.2020.0229
Jury SH, Watson WH III (2000) Thermosensitivity of the lobster, Homarus americanus, as determined by cardiac assay. Biol Bull 199:257–264
Jury SH, Langley TG, Gutzler BC, Goldstein JS, Watson WH III (2018) Monitoring the behavior of freely moving lobsters with accelerometers. Bull Mar Sci 94:533–553. https://doi.org/10.5343/bms.2017.1117
Laske TG, Garshelis DL, Iles TL, Iaizzo PA (2021) An engineering perspective on the development and evolution of implantable cardiac monitors in free-living animals. Philos T Roy Soc B 376:20200217. https://doi.org/10.1098/rstb.2020.0217
Manos A, Klein I, Hazan T (2019) Gravity-based methods for heading computation in pedestrian dead reckoning. Sensors 19:1170. https://doi.org/10.3390/s19051170
McGaw IJ, Nancollas SJ (2018) Experimental setup influences the cardiovascular responses of decapod crustaceans to environmental change. Can J Zool 96:1043–1052. https://doi.org/10.1139/cjz-2017-0252
McGaw IJ, Nancollas SJ (2021) Patterns of heart rate and cardiac pausing in unrestrained resting decapod crustaceans. J Exp Zool A 335:678–690. https://doi.org/10.1002/jez.2533
McGaw IJ, Reiber CL (2015) Circulatory physiology. In: Chang ES, Thiel M (eds) The natural history of the Crustacea: Physiology. Oxford University Press, New York, NY, pp 199–246
McGaw IJ, Steell SC, Van Leeuwen TE, Eliason EJ, Cooke SJ (2018) Application of miniature heart rate data loggers for use in large free-moving decapod crustaceans: method development and validation. Physiol Biochem Zool 91:731–739. https://doi.org/10.1086/695839
McMahan MD, Brady DC, Cowan DF, Grabowski JH, Sherwood GD (2013) Using acoustic telemetry to observe the effects of a groundfish predator (Atlantic cod, Gadus morhua) on movement of the American lobster (Homarus americanus). Can J Fish Aquat Sci 70:1625–1634
McMahon BR (1999) Intrinsic and extrinsic influences on cardiac rhythms in crustaceans. Comp Biochem Phys A 124:539–547
McMahon BR, Wilkens JL (1972) Simultaneous apnoea and bradycardia in the lobster Homarus americanus. Can J Zool 50:165–170
Mitani Y, Andrews RD, Sato K, Kato A, Naito Y, Costa DP (2010) Three-dimensional resting behaviour of northern elephant seals: drifting like a falling leaf. Biol Letters 6:163–166. https://doi.org/10.1098/rsbl.2009.0719
O’Grady DF III, Jury SH, Watson WH III (2001) Use of a treadmill to study the relationship between walking, ventilation and heart rate in the lobster Homarus americanus. Mar Freshwater Res 52:1387–1394
Owings M, Chabot CC, Watson WH III (2020) Effects of the biomedical bleeding process on the behavior and hemocyanin levels of the American horseshoe crab (Limulus polyphemus). Fish Bull 118:225–239. https://doi.org/10.7755/FB.118.3.2
Patin R, Etienne M-P, Lebarbier E, Chamaillé-Jammes S, Benhamou S (2020) Identifying stationary phases in multivariate time series for highlighting behavioural modes and home range settlements. J Anim Ecol. https://doi.org/10.1111/1365-2656.13105
Portugal SJ, White CR (2018) Miniaturization of biologgers is not alleviating the 5% rule. Methods Ecol Evol 9:1662–1666. https://doi.org/10.1111/2041-210X.13013
Qasem L, Cardew A, Wilson A, Griffiths I, Halsey LG, Shepard ELC, Gleiss AC, Wilson R (2012) Tri-axial dynamic acceleration as a proxy for animal energy expenditure: should we be summing values or calculating the vector? PLoS ONE 7:e31187. https://doi.org/10.1371/journal.pone.0031187
R Core Team (2018) R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna, Austria
R Studio Team (2016) RStudio: Integrated Development Environment for R, Boston, MA
Reubens J, Aarestrup K, Meyer C, Moore A, Oakland F, Afonso P (2021) Compatibility in Acoustic Telemetry. Anim Biotelem 9:33. https://doi.org/10.1186/s40317-021-00253-z
Rose RA, Wilkens JL, Walker RL (1998) The effects of walking on heart rate, ventilation rate and acid-base status in the lobster Homarus americanus. J Exp Biol 201:2601–2608
Rose RA, MacDougall K, Patel A, Wilkens JL, Walker RL (2001) Effects of walking on ventilatory and cardiac function in intact and cardiac-impaired lobsters. Physiol Biochem Zool 74:102–110
Rutz C, Hays GC (2009) New frontiers in biologging science. Biol Lett 5:289–292. https://doi.org/10.1098/rsbl.2009.0089
Scopel DA, Watson WH (2021) Evidence for homing behavior in the American lobster Homarus americanus (H. Milne Edwards, 1837) (Decapoda: Astacidea: Nephropidae). J Crustacean Biol 41:062. https://doi.org/10.1093/jcbiol/ruab062
Scopel DA, Golet WJ, Watson WH (2009) Home range dynamics of the American lobster, Homarus americanus. Mar Freshw Behav Phy 42:63–80
Shepard ELC, Wilson RP, Halsey LG, Quintana F, Laich AG, Gleiss AC, Liebsch N, Myers AE, Norman B (2008) Derivation of body motion via appropriate smoothing of acceleration data. Aquat Biol 4:235–241. https://doi.org/10.3354/ab00104
Shiomi K, Sato K, Mitamura H, Arai N, Naito Y, Ponganis PJ (2008) Effect of ocean current on the dead-reckoning estimation of 3-D dive paths of emperor penguins. Aquat Biol 3:265–270. https://doi.org/10.3354/ab00087
Shuranova ZP, Burmistrov YM, Strawn JR, Cooper RL (2006) Evidence for an autonomic nervous system in decapod crustaceans. International Journal of Zoological Research 2:242–283. https://doi.org/10.3923/ijzr.2006.242.283
Smith F (2013) Understanding HPE in the VEMCO Positioning System (VPS). VEMCO Document # DOC-005457–01
Steell SC, Cooke SJ, Eliason EJ (2020) Artificial light at night does not alter heart rate or locomotor behaviour in Caribbean spiny lobster (Panulirus argus): insights into light pollution and physiological disturbance using biologgers. Conserv Physiol 8:coaa097. https://doi.org/10.1093/conphys/coaa097
Styrishave B, Andersen O, Depledge MH (2003) In situ monitoring of heart rates in shore crabs Carcinus maenas in two tidal estuaries: effects of physico-chemical parameters on tidal and diel rhythms. Mar Freshw Behav Phy 36:161–175. https://doi.org/10.1080/10236240310001603215
Udalova GP, Kholodkevitch SV, Fedotov VP, Kornienko EL (2012) Changes in heart rate and circadian cardiac rhythm as physiological biomarkers for estimation of functional state of crayfish Pontastacus leptodactylus Esch. upon acidification of the environment. Inland Water Biol 5:119–127. https://doi.org/10.1134/S1995082912010166
van der Knaap I, Slabbekoorn H, Winter HV, Moens T, Reubens J (2021) Evaluating receiver contributions to acoustic positional telemetry: a case study on Atlantic cod around wind turbines in the North Sea. Anim Biotelem 9:14. https://doi.org/10.1186/s40317-021-00238-y
Watson WH III, Golet WJ, Scopel DA, Jury SH (2009) Use of ultrasonic telemetry to determine the area of bait influence and trapping area of American lobster, Homarus americanus, traps. New Zeal J Mar Fresh 43:411–418
Weaver SJ, Westphal MF, Taylor EN (2021) Technology wish lists and the significance of temperature-sensing wildlife telemetry. Anim Biotelem 9:29. https://doi.org/10.1186/s40317-021-00252-0
Whitford M, Klimley AP (2019) An overview of behavioral, physiological, and environmental sensors used in animal biotelemetry and biologging studies. Anim Biotelem 7:26. https://doi.org/10.1186/s40317-019-0189-z
Williams HJ, Taylor LA, Benhamou S, Bijleveld AI, Clay TA, de Grissac S, Demšar U, English HM, Franconi N, Gómez-Laich A, Griffiths RC, Kay WP, Morales JM, Potts JR, Rogerson KF, Rutz C, Spelt A, Trevail AM, Wilson RP, Börger L (2020) Optimizing the use of biologgers for movement ecology research. J Anim Ecol 89:186–206. https://doi.org/10.1111/1365-2656.13094
Wilmers CC, Nickel B, Bryce CM, Smith JA, Wheat RE, Yovovich V (2015) The golden age of bio-logging: how animal-borne sensors are advancing the frontiers of ecology. Ecology 96:1741–1753
Wilson RP, White CR, Quintana F, Halsey LG, Liebsch N, Martin GR, Butler PJ (2006) Moving towards acceleration for estimates of activity-specific metabolic rate in free-living animals: the case of the cormorant. J Anim Ecol 75:1081–1090
Wilson RP, Liebsch N, Davies IM, Quintana F, Weimerskirch H, Storch S, Lucke K, Siebert U, Zankl S, Müller G, Zimmer I, Scolaro A, Campagna C, Plötz J, Bornemann H, Teilmann J, McMahon CR (2007) All at sea with animal tracks: methodological and analytical solutions for the resolution of movement. Deep-Sea Res Pt II 54:193–210. https://doi.org/10.1016/j.dsr2.2006.11.017
Wilson RP, Shepard ELC, Liebsch N (2008) Prying into the intimate details of animal lives: use of a daily diary on animals. Endanger Species Res 4:123–137. https://doi.org/10.3354/esr00064
Wilson RP, Börger L, Holton MD, Scantlebury DM, Gómez-Laich A, Quintana F, Rosell F, Graf PM, Williams H, Gunner R, Hopkins L, Marks N, Geraldi NR, Duarte CM, Scott R, Strano MS, Robotka H, Eizaguirre C, Fahlman A, Shepard ELC (2020) Estimates for energy expenditure in free-living animals using acceleration proxies: a reappraisal. J Anim Ecol 89:161–172. https://doi.org/10.1111/1365-2656.13040
Wolcott TG (1995) New options in physiological and behavioural ecology through multichannel telemetry. J Exp Mar Biol Ecol 193:257–275
Wolcott TG, Hines AH (1989) Ultrasonic biotelemetry of muscle activity from free-ranging marine animals: a new method for studying foraging by blue crabs (Callinectes sapidus). Biol Bull 176:50–56
Wolcott TG, Hines AH (1996) Advances in ultrasonic biotelemetry for animal movement and behavior: the blue crab case study. In: Lang MA, Baldwin CC (eds) Methods and Techniques of Underwater Research. Smithsonian Institution, Washington DC, pp 229–236
Young RE, Coyer PE (1979) Phase co-ordination in the cardiac and ventilatory rhythms of the lobster Homarus americanus. J Exp Biol 82:53–74
Zenone A, Ceraulo M, Ciancio JE, Buscaino G, D’Anna G, Grammauta R, Mazzola S, Giacalone VM (2019) The use of 3-axial accelerometers to evaluate sound production in European spiny lobster, Palinurus elephas. Ecol Indic 102:519–527. https://doi.org/10.1016/j.ecolind.2019.02.064
Zenone A, Ciancio JE, Badalamenti F, Buffa G, D’Anna G, Pipitone C, Giacalone MV (2020) Influence of light, food and predator presence on the activity pattern of the European spiny lobster Palinurus elephas: An investigation using tri-axial accelerometers. Ecol Indic 113:106174. https://doi.org/10.1016/j.ecolind.2020.106174
Acknowledgements
Work was conducted under NHFG permits MFD 1808 and MFD 1922. Nathan Furey and Joshua Carloni assisted in setting up the telemetry array. Discussions with Steve Jury and Jason Goldstein provided valuable input on methodology and analyses. Thanks to Nate Rennels (UNH CML) for assistance in setting up the tanks for the lab studies. Cam Barnes, Brian Davis, and Abigail Lemmon aided with the laboratory and startle response data analysis. Brian Davis, Anna Dorrance, Jason Goldstein, Mackenzie Meier, and Kaitlin Van Volkom assisted with diving to recover the lobsters in the field study. Finally, we would like to express our appreciation to the two anonymous reviewers whose suggestions helped improve the final version of this manuscript.
Funding
Partial funding for this project was provided by the UNH Marine Biology Graduate Program and a PADI Foundation grant to BG.
Author information
Authors and Affiliations
Contributions
Logger construction and data collection were performed by BG. The first draft of the manuscript was written by BG. Both authors contributed equally to all other aspects of the study.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Ethics approval
No approval of research ethics committee was required as all work was conducted on unregulated invertebrate species.
Additional information
Responsible Editor: C. Pansch-Hattich.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file 1 (MP4 14607 KB)
Supplementary file 2 (MP4 6713 KB)
Rights and permissions
About this article

Cite this article
Gutzler, B.C., Watson III, W.H. Measurements of American lobster heart rate and movements in the wild using a low-cost open source datalogger. Mar Biol 169, 52 (2022). https://doi.org/10.1007/s00227-022-04046-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00227-022-04046-7