
Abstract
We can accurately reach to touch our index fingertip to various points on the body without vision. Awareness of location/motion of the index fingertip and other body parts through proprioception is required for such movements. Proprioception involves processing sensory information, but it is also debated whether internal model estimates of body state from motor commands improve proprioception. We tested the hypothesis that proprioceptive errors increase with increases in speed of hand movement and whether an internal model contributes to more accurate proprioception, especially in higher speed movements. Ten subjects made voluntary reaching movements with their dominant arm to touch its index-tip to the index-tip of the non-dominant arm that was moved passively or actively at three speeds (slow, comfortable, fast) in various directions. Four conditions required the experimenter to passively move the subject’s target arm at slow, comfortable and fast speeds and in different directions. A fifth condition required the subject to actively move both arms to perform the task. Subjects performed these tasks with high accuracy during slow and comfortable speed movements of the target arm. Errors averaged 3.7 mm larger when the target was moved faster and were equivalent to errors for slower movements (p < 0.014). Errors in the active and passive target movement conditions were also equivalent (p < 0.001). These findings show that proprioception is accurate across many different speeds of passive and active target motion and that there was no evidence than an internal model contributes to improved accuracy of proprioception during active movements.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Proprioception is the body’s sense of location and motion of its parts without the use of vision. Healthy individuals can use proprioception to control movements of the hand rapidly and accurately to various body parts as shown by, for example, swatting at a bug on various unseen parts of the body. Moreover, they can perform such complex movements while moving and without fully attending to the task (e.g., while walking and conversing with a friend or thinking about what to have for dinner), suggesting that proprioception can operate well at a subconscious level. Although it is agreed that muscular, joint, and cutaneous receptors all contribute to estimation of limb position and proprioceptive sense (Proske and Gandevia 2012), the important mechanisms underlying accurate proprioception are still debated. A major theory that is well accepted in the neuroscience literature is that the CNS incorporates the motor command into an internal musculoskeletal model to predict the behavior of the body and limbs and combines with sensory information to provide a more accurate estimate of limb orientation than is available from noisy proprioceptive sensory inputs alone (Wolpert et al. 1995; Wolpert and Ghahramani 2000). This theory, therefore, predicts that proprioception should be more accurate (i.e., smaller, and less variable errors) during active, voluntary movements than during passive movements imposed by an outside force.
Previous experiments using movements/positioning constrained to one joint or to a single plane and requiring conscious perceptual or memory processes showed that proprioception for active positioning or movements is generally more accurate than under passive movements, especially at slower speeds (Lonn et al. 2001; Fuentes and Bastian 2010; Goble and Brown 2009; Gritsenko et al. 2007; Monaco et al. 2010; Paillard and Brouchon 1968). However, other studies have reported no difference in proprioceptive accuracy between active and passive hand/finger localization tasks carried out under constrained perceptual conditions [e.g., (Jones et al. 2010)] and during unconstrained movements/positioning of the hand in 3D space without a focus on conscious perceptual processing (Capaday et al. 2013; Darling et al. 2018). Darling and colleagues reported similar high accuracy for reaching with the right hand while blindfolded to oppose the right index-tip to the left index-tip during comfortable speed active and passive movements of the left hand in 3D space. Notably, such unconstrained movements are similar to reaching movements made in many daily tasks that involve motion at multiple joints and move the hand in various directions to place it to allow grasp of objects in various locations within the workspace. Subjects could perform the task of reaching with the right hand to touch its index-tip to the index-tip of the passively moved left hand while blindfolded with initial reach errors that averaged only 2 mm larger than when performing the task with vision allowed. This demonstrates high precision in localizing a small moving body part without vision based on complex proprioceptive input from multiple muscles and joints. Such high precision suggests that the accuracy of proprioception is much better than in highly constrained tasks requiring conscious perception/memory, which was also concluded in a study by van Beers and colleagues (1998). It has also been reported that haptic sensing of object curvature is equally accurate during active and passive haptic exploration of the object, indicating that prediction of sensory feedback from movement commands does not contribute to haptic perception (Sciutti et al. 2010).
An important question is whether proprioception is accurate when movements are fast because of delays in transmitting proprioceptive information to the CNS, time for processing the information, and transmission of new motor commands. It is possible that predictive modeling through the cerebellum using internal models may be needed to predict the course of a fast voluntary movement and prevent negative influences of such delays on control of fast movements (e.g., Bhanpuri et al. 2013; Boisgontier and Nougier 2013, Boigontier and Swinnen 2014). Thus, the primary purpose of the present study was to assess whether accuracy of localizing the index-tip is poorer during fast voluntary or passive movements. We also compared accuracy during slower active and passive movements to test whether proprioceptive accuracy decreased with increasing movement speed. We hypothesized that accuracy of unconstrained index-to-index apposition during hand movements is similar at: (1) slow and fast movement speeds and (2) during active and passive movement of the target hand at slow and fast speeds. Previous work in a more constrained, elbow joint movement task involving memory showed greater accuracy in matching speed of slower movements (Goble and Brown 2009). However, other research reported no effect of movement speed on proprioceptive acuity in young adults in a single joint ankle task (Boisgontier and Nougier 2013). Moreover, in our recent study of proprioception during comfortable speed movements, even subjects who moved very quickly with this instruction were as accurate as subjects who moved slowly (Darling et al. 2018), hence our hypotheses that proprioceptive accuracy is similar in slow and fast movements. Finally, we wish to emphasize that we think it is important to study proprioception using natural unconstrained arm movements in 3D space, similar to movements we perform every day that often involve controlling the two hands together in bimanual tasks. Results of the current study will apply directly to control of such movements in daily tasks. This contrasts with the many studies of proprioception using highly constrained laboratory tasks that involve conscious perceptual processing and, in some cases, processing of proprioceptive memory.
Methods
Subjects
Ten right-handed subjects age 18–22 years (6 females, 4 males) participated in the experiment. Subjects were excluded if they had any arm movement limitations due to injury or neuromuscular disease. The subjects signed informed consent documents approved by the University of Iowa Institutional Review Board demonstrating that they were willing to participate in the study.
Experimental design and protocol
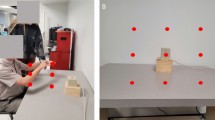
Subjects were seated with their right and left index fingers placed about shoulder width apart on a table. This was the starting position for each motor task in which the right hand was moved to touch the right index-tip to the left index-tip under different conditions described below (Fig. 1). Several practice trials in which the task was completed with both the left and right hands moved voluntarily at comfortable speed with vision allowed were done to ensure that the subject understood the task. These practice trials were also done to help the experimenter estimate the subject’s comfortable movement speed. For the experimental trials, subjects were blindfolded, and the left (target) arm of the subject was moved in one of 13 directions (Fig. 2: 4 acute angle horizontal plane directions × 3 acute angle vertical plane directions + vertical). The different directions occurred in random order and subjects were unaware of the direction until after movement of the left arm began in the four passive target movement conditions. There were five different experimental conditions, all with no vision (NV) allowed: (1) NVPS—passive movement of the left arm at slow (S) speed (about 50% of comfortable speed movement); (2) NVPC—passive movement of the left arm at comfortable (C) speed; (3) NVPF—passive movement of the left arm at fast speed (about 50% higher than comfortable speed movement); (4) NVPVar—passive movement of the left arm at variable (Var) speed (speed was varied randomly to be either slow, comfortable, or fast speed for each target direction); the speed was unknown to the subject until after movement began, and (5) NVAVar—active voluntary movement of the left arm at variable speeds (speed and direction of the left arm movement specified to the subject on each trial).

Starting position for subject before each trial. The target arm would be moved in the desired direction by the experimenter for passive movement conditions and by the subject for the active movement condition. Note that there was a computer mouse located under the left index instead of a button as shown here

Target hand movement directions relative to the table and starting position of the subject. Movement directions from the starting position are shown in the vertical plane (A) and horizontal plane (B). The movement directions included those specified in the horizontal and vertical planes and combinations of horizontal and vertical directions (e.g., H30V60—a 60° upward motion along a 30° horizontal plane motion) for a total of 13 different directions [i.e., 4 horizontal directions (H-30, H0, H30, H60) × 3 vertical directions (Vo, V30, V60) + vertical or V90]
The subject was instructed in the passive target movement conditions to begin voluntary movement of the right arm when they felt the left arm begin motion, and to try to touch the right index-tip to the left index-tip in a single, smooth movement, while both arms were in motion. If the right arm movement was not a single, smooth movement, or finished moving clearly after the left arm as observed by the experimenter, the trial was discarded and repeated. The experimenter imposed passive motion by holding the proximal forearm and wrist and moving the arm at the specified speed. Note that the subject never experienced slow and fast passive target movements until those experimental conditions began.
The active condition (NVAV) was always performed after the four passive target movement speed conditions to prevent possible learning effects of practicing and performing the task with active movements of the left arm, and because the NVAV condition was the most complex to perform due to the task instructions. In the NVAVar condition, the left index-tip started on a computer mouse button and subjects were instructed to begin their voluntary right-hand movement when a beep sounded that was triggered randomly 50–150 ms after release of the mouse button. Active right-hand movement was started after the beep to prevent simultaneous movement onset of the two arms, which we assumed would make the task easier to perform accurately. Prior to each movement in the NVAVar condition, subjects were instructed on the speed (i.e., slow, comfortable or fast) and direction. Directions of target arm motion were specified as a combination of horizontal and vertical plane directions (e.g., H-30V60, H0V30, H60V0, H30V60, H60V60) such that movements were purely in the horizontal plane (e.g., H60V0), purely in the vertical plane (e.g., H0V30) or obliquely in both planes (e.g., H60V30). Subjects practiced target arm movements with eyes open until they understood the speed and direction instructions and carried out the correct left arm movements with instructions. If a left arm movement was performed incorrectly in terms of speed or direction the trial was discarded and repeated.
In each experimental condition the target hand movements occurred twice or three times for each of the 13 movement directions. That is, in the three conditions when subjects knew the movement speed (i.e., NVPS, NVPC, NVPF) there were 26 trials (two target hand movements in each of the 13 directions). In the two variable speed conditions (NVPVar and NVAVar) there were three target hand movements; one each at slow, comfortable, and fast speeds in each of the 13 directions, for 39 trials. Altogether, each subject performed 156 valid trials in total (3 × 26 + 2 × 39 = 156), in addition to practice movements with vision and practice movements in the NVAV condition.
The NVPC condition was always performed first to allow the experimenter and subject to understand the baseline comfortable speed before moving on to the fast, slow, or variable speed conditions. The subject was aware of the speed that would be imposed on the target arm in the three known speed conditions (i.e., slow, comfortable, fast). In the passive variable speed target movement trials, the subject was unaware of the speed and direction of the imposed target hand movements. The subjects were aware of the speed and direction of target hand motion that was to be performed in the active variable speed condition, because they voluntarily moved the target hand.
Data acquisition
Model 130 Trakstar sensors (1.5 mm × 7.7 mm; Ascension Technologies, Burlington, VT, USA) were taped to the nails of each index finger to track the reaching movements. The three-dimensional locations of the Trakstar sensors were recorded at 240 Hz by a custom Matlab program. The sensor wires were taped to the subject’s hand and wires with slack were taped to the arm to eliminate constraints on arm movement or any extra movement of the wires that could interfere with data collection. The Trakstar magnetic transmitter was located centrally on the table and was placed at a point beyond the workspace to allow for proper tracking.
Data analysis
After completion of the experiment, the Matlab data files were imported into datapac2k2 (Run Technologies) to be analyzed. Tangential speeds of the left and right index-tips were computed and used to identify onset and termination of the index finger movements using a velocity criterion for onset and end of target and voluntary hand movements of ~ 2 cm/s (e.g., Fig. 3). In addition, visual inspection of each trial was completed to verify onset and termination of the movements, as well as to check for trials in which the voluntary reaching movement was not performed in one continuous motion.

Examples of the tangential velocity profiles of the index-tips of the target (thick line) and reaching (thin line) arms movements in the active (A) and passive (B) conditions. The first two dashed lines indicate movement onsets for the target and reaching arms, and the last two dashed lines indicate terminations of the movements for target and reaching arms
3D distance error between the left and right index-tip sensors (i.e., straight line distance between the sensors in 3Dspace) were computed for each trial. Larger single trial distance errors (greater than 3 S.D. above the mean distance error within a condition), often associated with a secondary corrective movement, were considered outliers and eliminated from analysis. This resulted in elimination of only 1.22% of trials across all subjects (i.e., 19 of 1560 total trials). Mean distance error and variable error (S.D. of distance errors) for each experimental condition were then computed. Means and standard deviations of the peak velocities of the reaching and target hand movements were also computed to be compared across the different speed conditions. Mean and variable distance were each compared across the three known speed conditions (i.e., NVPS, NVPC, NVPF) using one-way repeated measures ANOVA to test whether errors differed among those conditions. Huynh–Feldt adjustments to degrees of freedom were applied in these ANOVAs if sphericity was violated and the corrected p values are reported in the Results section. A paired t test was used to test whether mean and variable errors in the two variable speed conditions (NVPVar and NVAVar) differed. Effect sizes (Cohen’s d) and samples sizes needed for 80% power to detect a difference were also computed for comparison of errors in the active and passive variable speed conditions. We also tested whether mean errors differed between these two conditions in each subject using independent t tests. Regression analyses were performed in each subject to assess if errors on individual trials increased with peak speed of target hand motion and with peak speed of reaching hand motion in the two variable speed conditions (NVAVar, NVPVar).
Results
Three main sets of results are presented as follows. First, we show that peak tangential speeds of the target index fingertip clearly differed in the slow, comfortable and fast conditions when the experimenter moved the target arm. Second, subjects intercepted the moving left (target) index-tip very accurately in all five conditions. Third, we found that speed minimally affects accuracy of proprioception in the passive target conditions. Finally, proprioceptive accuracy was no better in the active condition than in the passive condition with variable speeds of target hand movement. Relatedly, it is important to note that in the passive variable speed condition (NVPVar) subjects did not know in advance of each trial either the direction or speed of target arm motion, whereas they controlled speed and direction of target arm motion in the active variable speed condition (NVAV).
The experimenter successfully imposed different speeds of target hand motion in the slow, comfortable, and fast speed conditions. Peak tangential speed of the target hand averaged about 100 cm/s in the comfortable speed condition and, as planned, was clearly slower in the slow condition (66 cm/s on average) and clearly faster in the fast condition (160 cm/s on average) (Fig. 4A, F2,18 = 99.80, p < 0.0001, p < 0.05 for post-hoc comparisons of the three speed conditions). Average peak tangential speeds in the two variable speed conditions, which include slow, comfortable, and fast speed movements, were similar to those in the comfortable speed condition (Fig. 4), but with a large range of speeds similar to those across all three passive conditions. Durations of target arm movements averaged about 1.0 s in the comfortable speed and variable speed conditions, 1.3 s in the slow speed condition and about 0.7 s in the fast speed condition (Fig. 4C). Reaching arm movement durations were slightly shorter and peak speeds slightly faster than those of the target arm in each condition because of the later onset of the reaching arm motion (Fig. 4B). Importantly, subjects began their reaching hand movements in a direction to intercept the target hand movements despite not knowing the direction of the imposed target hand movements in advance (e.g., Fig. 5).

Mean peak tangential speeds and durations of target (A, C) and reaching (B, D) hand movements (B) in the 5 experimental conditions. Each bar shows the mean peak tangential speed or movement duration across all 10 subjects in a single condition. Symbols plotted with each bar show individual subject mean peak tangential speed or movement duration within that condition

Examples of frontal plane movement paths of the target and reaching index-tips in the slow (blues), fast (oranges), and comfortable (greens) passive movement conditions for one subject. In each graph, the lighter colors represent the target (left) index-tip motion, and the darker colors represent the voluntary (right) reaching index-tip motion for 3 trials (one for each speed) in the 60° Vertical, 30° Horizontal direction and in the 30° Vertical, 60° Horizontal direction
All subjects made accurate proprioceptively guided movements of the right hand to intercept the target index finger moving in a variety of directions and at different speeds in all experimental conditions. This is clearly shown in the scatterplots of Fig. 6 which show the locations of the target and reaching index fingertip at the endpoint of the reaching motion in the three passive speed conditions (Fig. 6A–C) and the two variable speed conditions (Fig. 6D–F) for one subject. Most data points fall very close to the line of identity in all conditions, showing that errors were small and that there was little difference in errors between the three passive speed conditions or in the active versus passive variable speed conditions. Of course, the Trakstar sensors cannot be co-localized, thus we also measured when the subjects touched index-tips together deliberately and with visual aid, resulting in an inter-sensor distance averaging about 1.7 cm (Darling et al. 2018). Indeed, mean 3D distance errors for all subjects averaged less than 2.5 cm and were similar in slow and comfortable speed conditions (Fig. 7A, F2,18 = 5.56, p = 0.026, p = 0.523 for comparison of slow and comfortable speed conditions) but averaged less than 4 mm larger in the fast speed condition (p < 0.045). We performed the two one-sided tests (TOST) statistical procedure to assess whether mean errors in the fast speed condition could be considered functionally equivalent to those in the slow and comfortable speed conditions. To use this procedure, we reasoned that an increase in error greater than ½ of index-tip width or 7.5 mm [i.e., index-tip width assumed to be 2 mm less than 17 mm average maximum index width—(Maleki-Ghahfarokhi et al. 2019)] would result in missing the index-tip on a high percentage of trials. Mean errors in the fast and slow speed conditions were equivalent (TOST equivalence test p = 0.014) as were mean errors in the fast and comfortable speed conditions (TOST equivalence test p = 0.008). Only two subjects had mean errors in the fast speed condition that were more than 7.5 mm larger than in the slow and comfortable speed conditions. Variable distance errors were also similar and small (averaging less than 0.8 cm) in the three passive known speed conditions but trended to being higher in the fast speed condition (Fig. 7B, F2,18 = 3.32, p = 0.0594, p < 0.1 for comparison of fast to slow and comfortable speed conditions, p = 0.696 for comparison of slow and comfortable speed conditions). We did not test for equivalence of variable errors across speed conditions, because we were unsure of the change of variable error that would be considered functionally significant and errors in the fast speed condition averaged only 2.1 mm larger than in the comfortable speed condition and only 1.77 mm larger than in the slow speed condition.

Scatterplots of voluntary (right arm) moving fingertip X-position, Y-position (left/right), and Z-position versus target (left arm) moving fingertip in the X, Y, Z positions at movement termination. The data from one subject is shown. Each plotted point is data from one single trial with a single motion in that condition. Graphs A–C depict data for the passive fast, comfy, and slow speeds for each position, and graphs D–F depict data for the passive and active variable speed conditions for each position. The line of identity is drawn on each graph in black. Note that the data points in all conditions fall nearly exactly on the line of identity

Bar graphs showing mean distance errors (A) and mean distance variable errors (B) in the 5 experimental conditions (Passive slow, passive fast, passive comfortable, passive variable speed, and active variable speed). Symbols plotted with each bar show individual subject mean distance errors (A) and distance variable errors (B)
Mean and variable distance errors did not statistically differ between the active and passive target movement conditions (mean errors: Fig. 7A, t9 = 0.50, p = 0.631, d = 0.157; variable errors: Fig. 7B, t9 = 0.65, p = 0.867, d = 0.055). Sample sizes of 26 and 203 subjects would provide 80% power to detect differences in mean and variable errors, respectively. Of note, these errors were similar to or slightly less than the errors in the three passive target conditions when subjects knew the approximate speed of target hand movement in advance (Fig. 7A, B). Equivalence testing of the mean errors using the same procedure as above showed the mean errors were equivalent in the active and passive conditions (TOST p < 0.001). Three subjects had lower mean errors in the passive than in the active condition and the other seven subjects had mean errors in the passive condition that were less than 7.5 mm larger than in the active condition. Variable errors in the passive condition averaged only 0.15 mm larger than in the active condition and six of the ten subjects had lower variable errors in the passive than in the active condition.
Distance errors on individual trials were poorly correlated with peak speed of target motion in all subjects in the variable speed conditions. In the passive target variable speed movement condition (NVPVar), coefficients of determination ranged from 0.001 to 0.326 (mean = 0.108) and three of ten subjects had statistically significant (p < 0.05) positive correlations (mean R2 = 0.308). Similar weak correlations were observed in the active variable speed condition (NVAV) as the coefficients of determination ranged from 0.000 to 0.263 (mean = 0.118) and four of ten subjects had statistically significant positive (p < 0.05) correlations (mean R2 = 0.214). Thus, only a small percentage of variation in distance errors was explained by variations in peak speed of target hand motion, even in the subjects showing increased distance errors with increasing peak speed.
Distance errors on individual trials were also poorly correlated with peak speed of reaching hand motion in the passive and active variable speed target movement conditions in each subject. Five of ten subjects had statistically significant positive correlations of distance errors and peak speed of reaching hand motion (p < 0.016) but mean coefficient of determination for these subjects was only 0.19 and, for all subjects, was 0.097. In the active variable speed condition four subjects had statistically significant positive correlations of distance errors with peak reaching hand speed. Mean coefficient of determination among these subjects was 0.169 and for all subjects was 0.083.
Discussion
We observed that all subjects had small errors in proprioceptively guiding the right index-tip to touch the passively or actively moving left index-tip at different speeds and movement directions. When subjects knew the approximate speed (but not direction) in advance of the target hand motion, the mean and variable distance errors were small and mean errors averaged less than 4 mm larger in the fast condition (NVPF) than in the slow and comfortable speed conditions (NVPS, NVPC) (p < 0.05). Furthermore, mean and variable errors were also small and did not differ between experimental conditions in which the target hand was moved actively or passively at variable speeds. Thus, there was no evidence to support the internal model theory that prediction of motion from motor commands is an important contributor to sensing of limb configuration and motion. Of note, in the passive variable speed target movement condition, subjects were unaware of the direction or speed of imposed target hand movement until after movement onset, whereas in the active variable speed condition, subjects controlled the target hand motion according to direction and speed instructions before each movement. These findings further emphasize the accuracy of proprioceptive sensory inputs for guiding hand movements as we found no evidence that motor commands and pre-movement knowledge of speed/direction of target hand movement produced lower errors in this precise proprioceptive task. Indeed, even in fast movements, subjects started right hand motion in a direction to accurately intercept the target left index-tip with a fairly straight movement in most cases (e.g., Fig. 5). This demonstrates accurate sensing of early target index-tip direction and speed to predict the imposed motion and future location of the target index-tip to plan the voluntary movement of the right hand.
Mean distance errors averaged less than 2.5 cm (Fig. 7A), indicating that purely proprioceptive information used when performing the tasks was quite accurate considering that perfect apposition would produce errors of about 1.7 cm [i.e., about the maximal width of the index—(Maleki-Ghahfarokhi et al. 2019)]. Variable errors averaged less than 1 cm. These small errors show that the proprioceptive information from the initial motion of the passively moved target arm was used to appropriately guide the voluntary reaching arm in a direction to accurately intercept the target index-tip. This confirms our previous findings (Darling et al. 2018) and extends them to show that proprioceptive guidance produces small errors even in fast movements when sensory feedback delays would be expected to create larger errors.
Previous work suggested that accuracy of proprioception may decrease as movement speed increases based on studies involving replicating or discriminating imposed movements of different speed (Lonn et al. 2001; Kerr and Worringham 2002; Goble and Brown 2009). Specifically, it was observed that imposed elbow angular motion was poorly replicated in terms of its peak angular velocity (errors approximately doubled when peak velocity of imposed movement increased from 30 to 60 o/s) (Goble and Brown 2009) or the speed of faster movements was discriminated with lower resolution than that of slower movements (Lonn et al. 2001; Kerr and Worringham 2002). Clearly, those tasks differed substantially from the task used in the present work in that motion was constrained to a single joint and memory of the imposed movement was required. Proprioceptive guidance may be commonly used daily to coordinate bimanual tasks and to reach to remembered external targets, but it is rather unusual for subjects to attempt to replicate or discriminate kinematics of a passively imposed or active movement at a single joint. The increase in error with increasing movement speed in these unusual tasks may be due to novelty and either the memory requirements and/or conscious perceptual processing required to discriminate velocities of two movements.
In the present work, the fast speed target hand movements had peak speeds that were ~ 2.5 times faster than the slow movements, and ~ 1.5 times faster than comfortable speed movements (Fig. 4A, B). This resulted in shorter movement durations and much less time available to process the sensory information (Fig. 4C, D). In addition, relevant is that the right-hand movements had higher peak velocities in the fast speed conditions, which would be expected to contribute to higher and more variable errors based on the well-known speed–accuracy tradeoff (Fitts 1954). Despite these substantial limitations on the time to process proprioceptive feedback from the upper limb motions, errors in the fast target movement conditions averaged less than 4 mm larger than in slow and comfortable speed conditions and were functionally equivalent according to equivalence tests comparing mean errors in the three conditions. We conclude that the decreased sensory processing time available during faster movements has no functional impact on use of proprioception to guide fast movements within the range of speeds studied here.
A secondary purpose of our experiment was to determine if errors differed in active versus passive conditions. As we expected from our previous studies (Capaday et al. 2013; Darling et al. 2018), no statistical difference was observed in the errors between the active and passive variable speed conditions. Moreover, errors in the active and passive conditions were functionally equivalent according to equivalence tests comparing mean errors in these conditions. In passive conditions, the nervous system can only use sensory information for state estimation and to guide movement of the right index-tip to the left index-tip. In active conditions, it is debated whether the nervous system uses only sensory inputs to direct target arm movements, or if it also integrates state estimations from motor commands to contribute to more accurate proprioception, as described in the internal model theory (Wolpert et al. 1995; Bhanpuri et al. 2013; Boisgontier and Nougier 2013; Boisgontier and Swinnen 2014). Previous studies providing support for the internal model theory reported that proprioceptive acuity under active conditions was more accurate than during passive conditions (Gritsenko et al. 2007; Fuentes and Bastian 2010; Goble and Brown 2010; Monaco et al. 2010; Paillard and Brouchon 1968). However, all these investigations used tasks that involved conscious perceptual processing and/or memory and were constrained to a single joint, plane or a single dimension. Such tasks are rather unfamiliar to subjects and quite different from the unconstrained movements made in daily life in which proprioception is apparently quite accurate under both passive and active conditions and in fast movements as we have shown here and previously (Capaday et al. 2013; Darling et al. 2018). Indeed, van Beers et al. (1998) concluded that “shoulder and elbow joint angles are known to the central nervous system with a precision of 0.6°–1.1°, implying that joint angles, or equivalent quantities, are represented in the CNS more precisely than they are consciously perceived.” We agree and think that measures taken from perceptual tasks do not reflect the true accuracy of proprioception as it is used to guide unconstrained movements of the upper limb. Thus, because mean errors were functionally equivalent and variable errors did not differ under and passive and active variable speed conditions, we conclude there is no evidence that internal models contribute to proprioception in unconstrained slow and fast upper limb movements.
Data availability
Some data generated during and/or analysed during the current study are available at https://osf.io/rgpyu/?view_only=3775aeea55da4343bcb077e5a8c1c9e7.
References
Bhanpuri NH, Okamura AM, Bastian AJ (2013) Predictive modeling by the cerebellum improves proprioception. J Neurosci 33:14301–14306
Boisgontier MP, Nougier V (2013) Ageing of internal models: from a continuous to an intermittent proprioceptive control of movement. Age (dordr) 35:1339–1355
Boisgontier MP, Swinner SP (2014) Proprioception in the cerebellum. Front Hum Neurosci 8:212
Capaday C, Darling WG, Stanek K, Van Vreeswijk C (2013) Pointing to oneself: active versus passive proprioception revisited and implications for internal models of motor system function. Exp Brain Res 229:171–180. https://doi.org/10.1007/s00221-013-3603-4
Darling WG, Wall BM, Coffman CR, Capaday C (2018) Pointing to one’s moving hand: putative internal models do not contribute to proprioceptive acuity. Front Hum Neurosci. https://doi.org/10.3389/fnhum.2018.00177
Fitts PM (1954) The information capacity of the human motor system in controlling the amplitude of movement. J Exp Psychol 47:381–391. https://doi.org/10.1037/h0055392
Fuentes CT, Bastian AJ (2010) Where is your arm? Variations in proprioception across space and tasks. J Neurophysiol 103:164–171. https://doi.org/10.1152/jn.00494.2009
Goble DJ, Brown SH (2009) Dynamic proprioceptive target matching behavior in the upper limb: effects of speed, task difficulty and arm/hemisphere asymmetries. Behav Brain Res 200:7–14. https://doi.org/10.1016/j.bbr.2008.11.034
Goble DJ, Brown SH (2010) Upper limb asymmetries in the perception of proprioceptively determined dynamic position sense. J Exp Psychol Hum Percept Perform 36:768–775. https://doi.org/10.1037/a0018392
Gritsenko V, Krouchev NI, Kalaska JF (2007) Afferent input, efference copy, signal noise, and biases in perception of joint angle during active versus passive elbow movements. J Neurophysiol 98:1140–1154. https://doi.org/10.1152/jn.00162.2007
Jones SA, Cressman EK, Henriques DY (2010) Proprioceptive localization of the left and right hands. Exp Brain Res 204:373–383. https://doi.org/10.1007/s00221-009-2079-8
Kerr GK, Worringham CJ (2002) Velocity perception and proprioception. Adv Exp Med Biol 508:79–86. https://doi.org/10.1007/978-1-4615-0713-0_10
Lonn J, Djupsjobacka M, Johansson H (2001) Replication and discrimination of limb movement velocity. Somatosens Mot Res 18:76–82
Maleki-Ghahfarokhi A, Dianat I, Feizi H, Asghari-Jafarabadi M (2019) Influences of gender, hand dominance, and anthropometric characteristics on different types of pinch strength: a partial least squares (PLS) approach. Appl Ergon 79:9–16. https://doi.org/10.1016/j.apergo.2019.04.002
Monaco S, Kroliczak G, Quinlan DJ, Fattori P, Galletti C, Goodale MA, Culham JC (2010) Contribution of visual and proprioceptive information to the precision of reaching movements. Exp Brain Res 202:15–32. https://doi.org/10.1007/s00221-009-2106-9
Paillard J, Brouchon M (1968) Active and passive movements in the calibration of motion sense. In: Freedman S (ed) The neuropsychology of spatially oriented behavior. Dorsey, Homewood, pp 37–55
Proske U, Gandevia SC (2012) The proprioceptive senses: their roles in signaling body shape, body position and movement, and muscle force. Physiol Rev 92:1651–1697. https://doi.org/10.1152/physrev.00048.2011
Sciutti A, Squeri V, Gori M, Masia I, Sandini G, Konczak J (2010) Predicted sensory feedback derived from motor commands does not improve haptic sensitivity. Exp Brain Res 200:259–267
van Beers RJ, Sittig AC, Denier van der Gon JJ (1998) The precision of proprioceptive position sense. Exp Brain Res 122:367–377
Wolpert DM, Ghahramani Z (2000) Computational principles of movement neuroscience. Nat Neurosci 3(Suppl):1212–1217. https://doi.org/10.1038/81497
Wolpert DM, Ghahramani Z, Jordan MI (1995) An internal model for sensorimotor integration. Science 269:1880–1882
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Communicated by Bill J Yates.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yoss, A.L., Zuck, B.I., Yem, J.A. et al. High proprioceptive acuity in slow and fast hand movements. Exp Brain Res 240, 1791–1800 (2022). https://doi.org/10.1007/s00221-022-06362-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-022-06362-2