
Abstract
When humans handle a tool, such as a tennis racket or hammer, for the first time, they often wield it to determine its inertial properties. The mechanisms that contribute to perception of inertial properties are not fully understood. The present study’s goal was to investigate how proprioceptive afferents contribute to effortful perception of heaviness and length of a manually wielded object in the absence of vision. Blindfolded participants manually wielded specially designed objects with different mass, the static moment, and the moment of inertia at different wrist angles and angular kinematics. These manipulations elicited different tonic and rhythmic activity levels in the muscle spindles of the wrist, allowing us to relate differences in muscle activity to perceptual judgments of heaviness and length. Perception of heaviness and length depended on an object’s static moment and the moment of inertia, respectively. Manipulations of wrist angle and angular kinematics affected perceived heaviness and length in distinct ways. Ulnar deviation resulted in an object being perceived heavier but shorter. Compared to static holding, wielding the object resulted in it being perceived heavier but wielding did not affect perceived length. These results suggest that proprioceptive afferents differentially contribute to effortful perception of object heaviness and length. Critically, the role of afferent is specific to the mechanical variable used to derive a given object property. These findings open a new possibility of studies on the link between physiology, and different mechanical variables picked up by the perceptual system.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
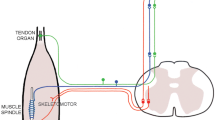
Everyday use of handheld objects relies on perception of object properties, such as heaviness, length, and shape, often through proprioceptive feedback (Wagman and Carello 2003; Michaels et al. 2007; Mangalam et al. 2018a). After all, effectively using a tool requires tailoring movements to support and manipulate it (e.g., swinging a hammer or tennis racket). Movement generates kinesthetic and proprioceptive afferent feedback critical for perception of object properties. The neurophysiological basis of this afferent feedback remains unknown. This study aimed to investigate how kinesthetic feedback (of limb position and movement) from muscle spindles (group Ia and II fibers) and force feedback from Golgi tendon organs (group Ib fibers) contribute to perception of two distinct properties of handheld objects: heaviness and length.
Until recently, the conventional understanding was that heaviness perception depends less on proprioceptive afference than on central efference. Specifically, the ‘central effort’ hypothesis predicts that the motor cortex sends an efference copy to the somatosensory cortex indicating ongoing motor commands (Gandevia and McCloskey 1977a, b). As predicted by this hypothesis, perceived heaviness in heaviness-matching tasks can increase after muscle fatigue despite no accompanying changes in afferent activity (Gandevia and McCloskey 1977a, b; Aniss et al. 1988; Proske and Allen 2019), and blocking afferent feedback by anesthesia does not affect perception of heaviness in these tasks (Gandevia and McCloskey 1977a, c; Proske and Gandevia 2012; Proske and Allen 2019). However, recent findings indicate that heaviness perception depends on feedback from not just tendon organs but also spindles (Brooks et al. 2013; Proske and Allen 2019), prompting a newer model for heaviness perception based on fusimotor reafference (Luu et al. 2011). Critically, spindles and tendon organs both contribute to heaviness perception, and anesthesia can reduce spindle contributions without interrupting tendon-organ function (Luu et al. 2011). This fusimotor reafference model has gained strength with the evidence that perceived heaviness scales as a function of the ratio of muscle activity (measured by peak EMG) to lifting acceleration (Waddell et al. 2016; Waddell and Amazeen 2017, 2018).
Length perception is rooted in afferent feedback distinctly from that for heaviness perception. Although we can expect reasonable accuracy in perceived heaviness even when all peripheral feedback is blocked by anesthesia (Luu et al. 2011), information about spatial dimensions (e.g., length and shape) appears to be rooted in the object’s mass distribution (Carello and Turvey 2000; Turvey and Carello 2011). In everyday terms, supporting a tennis racket in hand without moving tells us how heavy it is, but we need to swing it to judge whether it is head-light or head-heavy—these distinct modes of movement tap into distinct aspects of the mass distribution. Static holding allows heaviness perception to tap into the static moment, and wielding allows length perception to tap into inertial moments. Additionally, length perception might critically depend on feedback from spindles rather than from tendon organs. For example, people can use hand-wielding to perceive an occluded object’s length even when it is immersed in water (Pagano and Donahue 1999; Pagano and Cabe 2003; Mangalam et al. 2017, 2018b). The force of buoyancy reduces the force required to wield that object, the central effort, and the peripheral feedback from tendon organs.
Hence, perceptual judgments reflect differential reliance of specific kinds of effortful perception on different mechanoreceptors classes: heaviness versus length perception relying on tendon organs versus spindles, respectively. However, no study has yet tested how the afferent feedback from spindles and tendon organs might interact to produce perception of heaviness and length. The absence of such work likely reflects the rather significant technical problem limiting the scope of the neurophysiological investigation. Namely, direct measurement of spindle and tendon organs requires invasive techniques like microneurography. However, the bodily movement provides a promising entry towards filling this gap. For instance, vibrations of different frequencies can selectively modulate the feedback from spindles and tendon organs (Fallon and Macefield 2007; Luu et al. 2011; Brooks et al. 2013). Alternatively, manipulating joint-angle and kinematics of the movement system modulate the feedback from both spindles and tendon organs, respectively (Proske and Gandevia 2012). The present work pursues deeper understanding of the specific mechanoreceptor support of heaviness and length perception in this latter vein.
This wrist-angle portrayal of the exploratory postures can complement kinematics, specifically with the frequency of oscillatory wielding. Indeed, attempts to isolate physiological tissue have previously used vibrations and shown that different frequencies can selectively modulate the feedback from spindles and tendon organs (Fallon and Macefield 2007; Luu et al. 2011; Brooks et al. 2013). Instructing participants to use periodic oscillations for wielding can impose a similar frequency manipulation at the whole-limb scale. Wielding at higher frequency should increase the Ia spindle afferent activity. Hence, manipulating kinematics enlists a different physiological set of tissues than engaged by the wrist-angle manipulation. An open question is how this increased afference through Ia fibers might interact with Ib and II fibers. On a simple logic of “more afference entailing greater perceived magnitude,” it would be possible that frequency could increase the magnitude of perceptual judgments no matter the intention.
Then again, this too-simplistic view would omit the growing recognition that muscle-fiber activity is not simply additive, but that muscle fibers interact, both with each other (Savelberg et al. 2001; Blemker et al. 2005) and with their surrounding tendons and extracellular matrix (Taylor et al. 2003; Henry et al. 2005; Siebert et al. 2016; Yuan et al. 2021). Relatively bodywide connective tissues nest relatively local action potentials in the service of motor synergies, and these synergies bear a hierarchical organization that is sensitive to perceptual intent (Turvey and Fonseca 2014; Profeta and Turvey 2018). Hence, it is fully possible that how wrist angular kinematics interacts with wrist angle depends on intention.
Acknowledging a potential role for perceptual intent points to a longer range goal for the present work. We hope this work might bridge a gap between physiological and ecological approaches to perception. Despite its reluctance to engage with the physiology of the nervous system (Gibson 1979), the ecological approach is ready to appreciate movement manipulations as a means to engage different physiological tissues. Furthermore, while respecting that coordinated movements are a product of multifarious tissues, the ecological approach is ready to appreciate that movement can itself reshape the perceptual contribution of fluid and flexible nervous tissue (Fultot et al. 2019). We cannot expect that one movement or another can turn perceptions on or off (e.g., Palatinus et al. 2014). Similarly, we cannot expect specifically specific fibers to house specific perceptual features or capacities. ‘Heaviness’ and ‘length’ are contrived constructs of a psychophysicist’s experimental setup spanning multiple organisms and showing contingencies on the whole stimulus set (Kelty-Stephen and Eddy 2015), not properties native to a nervous system or its cells. Different perceptual intents could reshape the function of mechanoreceptors engaged by similar movements (e.g., Sakamoto and Kondo 2017; Marie and Talebkhah 2018; Maddaluno et al. 2020; Lu et al. 2020). If so, the physiological approach’s expectation of simple, dedicated functions for specific anatomical tissues gives way to a more ecological expectation. Namely, movement systems might use mechanoreceptors in context-sensitive ways to resolve problems posed at task-relevant scales encompassing whole organisms.
The present study aimed to parse out the contributions of feedback from spindles and tendon organs in perception of heaviness and length of manually wielded objects in the absence of vision. We asked blindfolded participants to manually wield about the wrist at different wrist angles and kinematics and report object heaviness and length judgments. We manipulated the objects to isolate independent mechanical properties (e.g., mass, static moment, and the moment of inertia) to link the observed effects of wrist angle and angular kinematics to the static moment and the moment of inertia specifying object heaviness and length, respectively. We expected that the magnitude and direction of the effects of wrist angle and angular kinematics would indicate how spindles and tendon organs contribute to effortful perception of heaviness and length. However, we expected that these different mechanoreceptors would not betray a simplistic mapping from anatomical specificity to functional specificity.
Our first hypothesis was that we would replicate known relationships of perceived heaviness and perceived length to static moment and the moment of inertia, respectively (Hypothesis-1).
Our second hypothesis addressed wrist angle. The ulnar and radial deviations should increase tension in the muscles and the antagonists’ length. Specifically, the ulnar deviation should increase the reafference from group II spindle fibers and Ib tendon-organ fibers, innervating the ulnar antagonist muscles. In contrast, the radial deviation should reduce the reafference from analogous fibers innervating from the radial agonist muscles (Kandel et al. 2000). Hence, we expected that ulnar deviation would increase perceived heaviness (Hypothesis-2a), and the radial deviation would reduce perceived heaviness (Hypothesis-2b). Because length perception might depend primarily on spindles rather than tendon organs, we hypothesized that wrist angle effects modulating heaviness judgments would come at the expense of length judgments, that is, the ulnar deviation would reduce perceived length (Hypothesis-2c), and the radial deviation would increase perceived length (Hypothesis 2d).
Our third hypothesis addressed wielding kinematics. We expected that frequency-related increases in afference through another different physiological route might lead to greater judgments of both types with greater wielding frequency (Hypothesis-3a and -3b for heaviness and length, respectively). We reserved more open-ended predictions about potential interaction effects. As noted in the preceding section, engaging multiple nerve fibers could prompt a complex interplay of physiological processes, reaching intentions pretuning physiology before exploration. Greater afference to Ia spindle fibers with greater frequency can amplify or blunt the perceptual effect of wrist-angle effects on Ib and II fiber afference. For instance, raising the overall level of afference to multiple fiber types could diminish the relative importance of each fiber type’s contribution to perceptual judgment, weakening the effects of wrist angle. Then again, engaging Ia fibers with higher frequency could accentuate the perceptual effect of wrist angle. Furthermore, the interaction could depend as well on intention. To our knowledge, no literature clarifies the proper direction of predicted effects. Hence, we predicted that the effects of wrist angle and angular kinematic would interact differently for heaviness and length perception (Hypothesis-3c).
Methods
Participants
Seven adult men and five adult women (M ± 1SD age = 25 ± 0.8 years, right-handed) voluntarily participated in the present experiment after providing written consent approved by the Institutional Review Board (IRB) at the University of Georgia (Athens, GA).
The mechanics of wielding
Consider a simplified two-dimensional task of wielding a rod of mass m with its center of mass at a distance d to the wrist joint, such that:
where τ is the muscular torque, Ilongitudinal reflects the resistance of the object to rotational movement about the wrist along the longitudinal axis, α is the angular acceleration of the wielded object, g is the gravitational acceleration, θ is the angle of the object relative to the horizontal plane, and d is the distance of the point mass m to the wrist. The right-hand side of Eq. (1) includes the moment of inertia, Ilongitudinal = md2 and the static moment M (= mdg).
Although both the static moment and moment of inertia describe mass distribution—both depend on mass (m) and position of that mass (d)—the two mechanical variables have distinct implications for perception. The moment of inertia can influence perception only through angular acceleration, whereas the static moment can influence perception at rest as well. Additionally, the static moment shows a linear dependence on d, whereas the moment of inertia shows a quadratic dependence on d. Thus, the contribution of one of the two parameters can be controlled by holding the other parameter constant. Ilongitudinal can be held constant while varying M by increasing m fourfold and halving d. M can be held constant while varying Ilongitudinal by doubling m and halving d. We designed six experimental objects that systematically differed in the mass, static moment, and moment of inertia.
Experimental objects
Each participant wielded six experimental objects, each object consisting of a dowel (oak, hollow aluminum, or solid aluminum; diameter = 1.2 cm, length = 75.0 cm) weighted by 4 or 12 stacked steel rings (inner diameter = 1.4 cm, outer diameter = 3.4 cm, thickness = 0.2 cm, mass = 14 g) attached to the dowel at 20.0 or 60.0 cm, respectively (Table 1; Fig. 1a, b). The dowels were weighted such that the resulting six objects systematically differed in the mass, m (Object 1 < Object 2, Object 3 < Object 4, Object 5 < Object 6), static moment, M (Object 1 = Object 2 = MS < Object 3 = Object 4 = MM < Object 5 = Object 6 = ML), and moment of inertia, Ilongitudinal (Object 1 > Object 2, Object 3 > Object 4, Object 5 > Object 6). A cotton tape of negligible mass was enfolded on each dowel to prevent the cutaneous perception of its composition (i.e., oak versus aluminum).

Schematic illustration of the experimental objects, setup, and exploratory conditions. a Each participant wielded six different weighted dowels that systematically differed in mass, m (Object-1 > Object-2, Object-3 > Object-4, Object-5 > Object-6), static moment, M (MS < MM < ML), and moment of inertia, Ilongitudinal (Object-1 < Object-2, Object-3 < Object-4, Object-5 < Object-6). b Each participant wielded each object for 5 s and reported their judgments of heaviness relative to a reference object of arbitrarily designated heaviness of 100 units, and length by adjusting the position of a marker on a string-pulley assembly. c The participant was instructed to constrain his/her wrist movement about 10° radial deviation (top panels), a neutral position (middle panels), or about 10° ulnar deviation (bottom panels). In a static condition, the participant lifted and held each object static (left panels), and in the two dynamic conditions, the participant lifted and wielded each object synchronously with metronome beats at 2 Hz or 3 Hz (center and right panels)
Experimental task, procedure, and instructions to the participants
Feedback from the spindles and tendon organs was differentially manipulated by asking participants to wield objects at different wrist angles and kinematics. Each participant was asked to wield each object at three different wrist angles: (1) 10° radial deviation (Fig. 1c, top panels), (2) neutral position (Fig. 1c, middle panels), and (3) 10° ulnar deviation (Fig. 1c, bottom panels). We expected that the ulnar and radial deviations of the wrist would increase the [baseline] spindle and tendon organ activity in the antagonist muscles: the radial and ulnar muscles of the hand, respectively. Additionally, at each wrist angle, each participant was asked to wield each object about the wrist at different angular frequencies. In a static condition, each participant was asked to lift and hold each object (Fig. 1c, left panels). In the two dynamic conditions, each participant was asked to lift and wield each object synchronously with metronome beats at 2 Hz or 3 Hz (Fig. 1c, center and right panels). At any given wrist angle, wielding an object at different frequencies would modulate the reafference from the spindles in addition to modulating the tendon organ activity—faster movement will result in increased spindle reafference. Each participant was instructed to wield the object at small amplitude so as to maintain the wrist angle at the ulnar, neutral, and radial positions through the entire trial.
Each participant stood on a designated location and assumed a given wrist angle comfortably. A custom setup consisting of two tripods was used to support and align each experimental object relative to the participant’s wrist at the ulnar, neutral, and radial positions (this setup is not shown in Fig. 1). Changing the heights of these two tripods—one lower and the other higher relative to the participant’s hand—allowed us to present an object, so the participant readily held that object at the ulnar, neutral, and radial positions of the wrist upon grasping it. At the beginning and after every six trials, the participant wielded a reference object (an unweighted hollow aluminum dowel, diameter = 1.2 cm, length = 75.0 cm, mass = 109 g) in an unconstrained manner and assigned it a heaviness value of 100. He/she assigned heaviness values proportionally higher than 100 to an object perceived heavier than the reference object (e.g., 200 to an object perceived twice as heavy), and heaviness values proportionally less than 100 to that perceived lighter than the reference object (e.g., 50 to an object perceived half as heavy). In each trial, following a ‘lift’ signal, the participant lifted the object and held it static or wielded it synchronously with metronome beats at 2 Hz or 3 Hz. After 5 s and following a ‘stop’ signal, the participant kept the object back on the custom tripod setup and reported perceived heaviness relative to the reference object and perceived length by changing the position of a marker by pulling a string on a string-pulley assembly. Note that only the heaviness (and not the length) of the experimental object was judged relative the reference object. We instructed the participant to minimized the movement amplitude in the 2 Hz and 3 Hz dynamic conditions. The 5 s duration was chosen to minimize memory-based comparisons from previous trials.
Each participant was tested individually in a 90–105-min session during which he/she completed a total of 108 trials: 3 Wrist angles × 3 Wrist angular kinematics × 6 Objects × 2 Trials. A crossed, pseudo-randomized block design was used, the factors of Wrist angle (Radial, Neutral, and Ulnar) crossed with the factors of Wrist angular kinematics (Static, 2 Hz dynamic, and 3 Hz dynamic). The order of the 12 trials (6 Objects × 2 Trials/Object) was pseudo-randomized for each block.
Statistical analyses
To investigate which mechanical variables best explained variation in perceived heaviness and length, we followed an information-theoretic approach. This approach uses the Akaike Information Criterion (AIC; or quasi-AIC (QAICc) for over-dispersed data) to choose a set of plausible models from a given set of a priori candidate models (Burnham and Anderson 2002). According to this approach, the Akaike information criterion (AIC) serves as an estimator of out-of-sample prediction error and thereby the relative quality of statistical models for a given set of data. AIC estimates the quality of each model relative to each of the other models. Specifically, a smaller AIC value reflects better performance/complexity trade-off. Thus, AIC provides a means for selecting the model with the best performance/complexity trade-off. We considered eight candidate models, including the null model and all the different combinations of the given mechanical variables: mass, static moment, and the logarithm of moment of inertia. We performed this analysis for heaviness and length separately and controlled for participant identity in each model using linear mixed-effects models (LMEs).
While there is no formal approach to identify if particular sample size is small, it is known that using AIC-based model selection with relatively small sample sizes can lead to selecting models with more parameters, thus overfitting (Hurvich and Tsai 1989). Therefore, we have used quasi-AICc or QAICc, which applies a sample size correction and correction for overdispersion, making it appropriate for use on datasets with small sample sizes (Hurvich and Tsai 1995). Hence, we maintain that the statistical techniques used are appropriate for our data.
To examine the effects of wrist angle, wrist angular kinematics, and object on perception, we submitted the values of perceived heaviness and perceived length to aligned rank transformed (ART) ANOVAs—one each for perceived heaviness and perceived length, using the function artlm() from package ARTool (Feys 2016) in RStudio (Team 2013). ART ANOVA is a nonparametric approach that accommodates multiple independent variables, interactions, and repeated measures. Coefficients for the model are described in Table 5. Significant main and interaction effects were followed by post-hoc comparisons with the p values corrected for multiple comparisons using Tukey’s method for pairwise contrasts and Holm method for interaction contrasts. Each test statistic was considered significant at the two-tailed alpha level of 0.05. Pairwise contrasts are described in Table 5.
Because our data did not fit any exponential family distribution, it required a non-parametric approach like the ART ANOVA (using ranked data) for inference. However, we still report Cohen’s d-like effect sizes—approach as taken in Rouder et al. (2012)—on the actual data (not ranked data) from the linear mixed-effects model (LME) using the function nlme() from package nlme (Pinheiro et al. 2018) in RStudio (Team 2013). Although the LMEs will be less reliable given the data distribution, they can still be used to make sense of the effect sizes. Effect sizes are described in Table 5.
Results
Testing Hypothesis-1: Distinct mechanical variables specified perceptual judgments of heaviness and length
To investigate which mechanical variables best explained variation in perceived heaviness, we followed an information-theoretic approach to model selection. Of the eight models we considered (Table 2), four models with non-zero probability included the static moment; the fifth model included mass and the moment of inertia but not the static moment. The model with the best performance-to-complexity ratio (i.e., smallest QAICc value) included only the static moment, and the support for this model was 1.46 times stronger than the model also including mass (evidence ratio = wi/wj = 0.35/0.24 = 1.46; Table 2; Fig. 2a, top panel), 1.84 times stronger than the model also including the moment of inertia (wi/wj = 0.35/0.19 = 1.84), and 3.89 times stronger than the model including all mechanical variables (wi/wj = 0.35/0.09 = 3.89). The second-best model also included object mass, which is consistent with the finding that for each value of the static moment, the object with a greater mass was perceived to be heavier (Tables 3, 4; Fig. 2a, bottom panel). Although all four models that also included mass and/or the moment of inertia showed closer fits, as reflected by the smaller log-likelihood values, the improvement in fit was accompanied by an increase in the complexity of the model, ultimately reducing the performance-to-complexity ratio, as reflected by the larger QAICc values. In other words, including mass and/or the moment of inertia in a model likely overfitted the data than it increased its predictive power. Considering model-averaged parameter estimates (Burnham and Anderson 2002), an increase in the static moment resulted in an increase in perceived heaviness; for the other two mechanical variables, the 95% confidence interval set included zero (Table 2).

Perception of heaviness and length via effortful touch was based on distinct mechanical variables. a Perceived heaviness increased as a function of the static moment. b Perceived length increased as a function of the moment of inertia. The thicker and thinner lines in the top panels indicate the best and the second-best model fits, respectively. Error bars indicate ± 1SEM. Mass: Object-1 > Object-2, Object-3 > Object-4, Object-5 > Object-6; Static moment: MS < MM < ML; Moment of inertia: Object-1 < Object-2, Object-3 < Object-4, Object-5 < Object-6
An identical model comparison yielded very distinct effects of the three mechanical variables on perceived length. Of the eight models we considered (Table 2), all four models with coefficients within 95% CI and non-zero probability included the moment of inertia. The model with the best performance-to-complexity ratio (i.e., smallest QAICc value) included only the moment of inertia, and the support for this model was 2.5 times stronger than the model also including the static moment (evidence ratio = wi/wj = 0.483/0.192 = 2.516; Table 2 and Fig. 2B, top panel), 2.6 times stronger than the model also including mass (wi/wj = 0.483/0.187 = 2.586), and 6.5 times stronger than the model also including both mass and the static moment (wi/wj = 0.483/0.074 = 6.527). In contrast to perceived heaviness, for each value of the static moment, the object with a greater moment of inertia—and not mass—was perceived to be longer (Tables 3, 4; Fig. 2b, bottom panel). The very close log-likelihood values for the four models indicate that including mass and the static moment did not increase the model fit—as indicated by closer-to-zero log-likelihood—as much as it increases the model complexity. In other words, including mass and/or the static moment in a model likely overfitted the data as opposed to increasing its predictive power. Considering model-averaged parameter estimates (Burnham and Anderson 2002), an increase in the moment of inertia resulted in an increase in perceived length; for the other two mechanical variables, the 95% CI set included zero (Table 2).
Testing Hypotheses-2: The ulnar deviation increased perceived heaviness and reduced perceived length
The ulnar deviation exerted the stronger effect on perceptual judgments while the radial deviation showed no difference from the neutral position. Regarding Hypotheses-2a and -2b, the manipulations of wrist angle affected perceived heaviness (F2,1231 = 23.56, P < 0.001; Table 3). Each object was perceived to be heavier when the wrist was constrained to move about the ulnar position than the neutral and radial positions (Neutral – Ulnar, t1232 = –4.88, η2 = 0.00, P < 0.001; Radial – Ulnar, t1232 = –6.62, P < 0.001; Tables 4, 5; Fig. 3a, top panel). Regarding Hypotheses-2c and -2d, the manipulations of wrist angle affected perceived length (F2,1231 = 13.37, P < 0.001; Table 3). In contrast to the observed effects on perceived heaviness, each object was perceived to be shorter when the wrist was constrained to move about the ulnar position than the neutral and radial positions (Neutral – Ulnar, t1232 = 3.55, P = 0.001; Radial – Ulnar, t1232 = 5.03, P < 0.001; Tables 4, 5b; Fig. 3a, middle panel).

Wrist angle and wrist angular kinematics showed opposite effects on perception of heaviness and length. The solid circles indicate the median value for each combination of wrist angle and wrist angular kinematics. The dots indicate judgments in individual trials and have been offsetted for visibility. a These effects of wrist angle on perception of heaviness diminished as the object was wielded at greater frequencies (Radial – Ulnar: 2 Hz dynamic – Static, P = 0.006; Neutral– Ulnar: 3 Hz dynamic – Static, P = 0.007; Radial – Ulnar: 3 Hz dynamic – Static, P = 0.027). b These effects of wrist angle on perception of length amplified as the object was wielded at 2 Hz and 3 Hz than held static (Neutral – Ulnar: 3 Hz – 2 Hz dynamic, P < 0.001; Radial – Ulnar: 3 Hz dynamic – Static, P = 0.006; Radial – Neutral: 2 Hz dynamic – Static, P = 0.007)
Testing Hypotheses-3: Wielding at a higher frequency prompted larger heaviness judgments with weaker dependence on the wrist angle and length judgments with stronger dependence on the wrist angle
Wielding at a higher frequency prompted larger heaviness judgments but no change in length judgments. Regarding Hypothesis-3a, the manipulation of wrist kinematics affected perceived heaviness (F2,1231 = 8.05, P < 0.001; Table 3). Each object was perceived to be heavier when that object was wielded at 2 Hz and 3 Hz than when held static (2 Hz dynamic – Static, t1232 = 3.96, P < 0.001; 3 Hz dynamic – Static, t1232 = 2.54, P = 0.030; Tables 4, 5; Fig. 3a, middle panel). However, regarding Hypothesis-3b, the manipulation of wrist kinematics did not affect perceived length (F2,1231 = 1.36, P = 0.257; Table 3).
Wielding at a higher frequency weakened the observed effects of the manipulation of wrist kinematics on heaviness judgments but accentuated the effects on length judgments. Regarding Hypothesis-3c, wrist angular kinematics modulated the effects of wrist angle on perceived heaviness (F2,1231 = 456.87, P < 0.001; Table 3). These effects of wrist angle on perceived heaviness diminished as each object was wielded at greater frequencies (Radial – Ulnar: 2 Hz dynamic – Static, P = 0.006; Neutral– Ulnar: 3 Hz dynamic – Static, P = 0.007; Radial – Ulnar: 3 Hz dynamic – Static, P = 0.027; Tables 4, 5; Fig. 3a, bottom panel). On the other hand, wrist angular kinematics modulated the effects of wrist angle on perceived length (F4,1231 = 5.66, P < 0.001; Table 3). These effects of wrist angle on perceived length amplified as each object was wielded at 2 Hz and 3 Hz than when held static (Neutral – Ulnar: 3 Hz – 2 Hz dynamic, P < 0.001; Radial – Ulnar: 3 Hz dynamic – Static, P = 0.006; Radial – Neutral: 2 Hz dynamic – Static, P = 0.007; Tables 4, 5; Fig. 3b, bottom panel).
Discussion
Blindfolded participants manually wielded objects of different mass and mass distribution about the wrist at different wrist angles and kinematics and reported their perceptual judgments of heaviness and length. Analysis revealed that perception of heaviness and length depended on an object’s static moment and the moment of inertia, respectively. Variation in perceived heaviness and length over variation in wrist angle and wrist angular kinematics suggest that movement-related peripheral feedback from spindles and tendon organs play a fundamental role in effortful perception of both heaviness and length. However, manipulations of wrist angle and wrist angular kinematics affected perceptual judgments of heaviness and length in distinct ways, suggesting that proprioceptive afferents differentially contribute to effortful perception of object heaviness and length. In what follows, we discuss possible explanations of these findings.
Perception of heaviness and length depend on an object’s static moment and the moment of inertia, respectively
The results of the AIC-based model selection suggest that distinct mechanical variables provide the informational support for perception of heaviness and length of an occluded wielded object. Perceived heaviness of an object was mainly a function of its static moment, a finding which strongly echoes previous results (Kingma et al. 2002, 2004). Notably, perceived heaviness of an object was an equally good function of the static moment and the combination of mass and the moment of inertia. This second finding reflects the fact that mass and the moment of inertia in conjunction can inform about the static moment. For instance, an object with a greater moment of inertia must have its center of mass distributed farther away from the hand than an object of the same mass but a smaller moment of inertia; both objects might be perceived equally heavy. This redundancy implies that previous studies that reported perceived heaviness as a function of the moment of inertia (Amazeen and Turvey 1996; Turvey et al. 1999; Streit et al. 2007a, b) do not contradict those that reported perceived heaviness as a function of the static moment (Kingma et al. 2002, 2004) after all. Indeed, when the mass, static moment, and moment of inertia vary independently, perception can depend on mechanical variables based on their salience (van de Langenberg et al. 2006). Heaviness perception can also depend on the style of lifting objects (Amazeen et al. 2011). Such deviation from a strict physical model is what characterizes the flexibility and context sensitivity of the haptic perceptual system (Thomas et al. 2019).
In contrast, perceived length of an object was mainly a function of its moment of inertia (Fitzpatrick et al. 1994; Turvey et al. 1998; Mangalam et al. 2018a). The mass and the static moment did not contribute to length perception, as adding these variables in the model did not increase its predictive power. Indeed, this result reflects our everyday experience of separating movement from the medium. An object’s static moment depends on the force of gravity incurred by a medium. Therefore, an object is perceived lighter when immersed in water than when wielded in the air. In contrast, an object’s moment of inertia depends on its situation within our movements: inertial moments reflect resistance to our ability to rotate the objects about our wrist. Hence, perceived length of an object is fairly consistent whether it is wielded in water or the air (Pagano and Donahue 1999; Pagano and Cabe 2003; Mangalam et al. 2017, 2018b).
Finally, we find that exploration plays a participatory rather than an exclusively defining role in perception. The postures and movements of the arm interact with the physiology rather than acting as a clamp that switches one mechanoreceptor class on and the other off. The fact that both kinds of perception (i.e., of heaviness and length) were possible in all exploratory modes entails that, under all motoric conditions, all candidate mechanical variables were accessible, and all candidate mechanoreceptors were active. Hence, restrictive exploratory behavior does not undermine the finding that heaviness and length judgments were tied to different mechanical variables. The diminution of overt angular accelerations in the static condition might leave perceptual information about the static moment more available (Kingma et al. 2002, 2004). However, holding an object still requires generating angular accelerations to counteract gravity. Access to the moment of inertia extends to movements that are incredibly minimal and sometimes completely unintended (Carello et al. 1992; Palatinus et al. 2013, 2014).
Proprioceptive afferents differentially contribute to effortful perception of object heaviness and length
The portrait that emerges is of a nervous system moderating its activity in accordance with relatively central expectations and relatively peripheral exploration. The results of nonparametric ANOVA support Luu et al.’s (2011) unifying hypothesis of the fusiform and reafferent origin of heaviness perception, depending on both efferent and afferent activity—deviations from expected reafference may support the perception of an object as lighter or heavier. We interpret the present results related to heaviness perception in the light of this unifying hypothesis and reconcile several previous results using the same hypothesis.
The dynamics of the muscular contraction produce reafference that conveys object heaviness and length of to the nervous system (von Holst and Mittelstaedt 1950). Afferent feedback from group Ia spindle fibers convey the rate of change of muscle length to the nervous system, group II spindle fibers convey a muscle’s instantaneous length (Al-Falahe et al. 1990; Proske and Gandevia 2012), and group Ib tendon-organ fibers convey the force produced by an active muscle. In our experiment, when an object was held static, the ulnar and radial deviations of the wrist supposedly increased tension in the muscles, as well as increase the antagonists’ length. The ulnar deviation would primarily increase the reafference from group II and Ib fibers innervating the ulnar antagonist muscles, and as a consequence, objects were perceived heavier than during the neutral wrist angle. In contrast, the radial deviation reduced the reafference from group II and Ib fibers innervating from the radial agonist muscles, due to which the objects were perceived lighter than during ulnar deviation and neutral wrist angle.
Volitional contraction of muscles while wielding an object would create strong reafference from group 1a afferents, reflecting rapid changes in muscle length. The result that wielding at 2 and 3 Hz increased perceived heaviness indicates that 1a afferents may also play a role in heaviness perception. The failure of wrist-angle manipulation to impact heaviness perception at the same wielding frequencies suggests that the movement-related reafference from group 1a afferents may contribute towards heaviness perception independent of 1b afferents. In contrast, in the absence of reafference from group Ia afferent when an object is held static, heaviness perception is based primarily on reafference from group Ib and group II afferents.
The fact that perceived length increased with radial deviation but failed to change with frequency suggests that length perception does not depend on the magnitude of group 1a afferent feedback. That length perception does not depend on the magnitude of afferent stimulation is not surprising. Length perception with reasonable accuracy is possible under reduced peripheral afferent feedback: by moving an object minimally (Carello et al. 1992; Lederman et al. 1996), and by wielding an object when its buoyancy reduces the resistance to rotation (Pagano and Donahue 1999; Pagano and Cabe 2003; Mangalam et al. 2017, 2018b). Despite being unable to identify objects in her left hand or sense them in the hand while manipulating them, a patient with peripheral neuropathy could perceive the length of occluded wielded objects with reasonable accuracy (Carello et al. 2006). Unfortunately, this study’s design does not allow us to identify and comment on how exactly afferent feedback contributes to length perception. Nonetheless, the result that the radial deviation amplified judgments of length despite the supposed reduction in the reafference from group II and Ib fibers innervating the radial agonist muscles strengthens our claim that group 1a and group Ib afferents independently and differentially contribute to length differently than they do to heaviness perception.
Limitations of the present study
One limitation of the present study is that the two repetitions for each combination of wrist angle, wrist angular kinematics, and object are insufficient to develop a measure of central tendency for any individual. However, there are a few points to be noted here. First, we were interested in defining how individuals use proprioceptive and kinesthetic sensory feedback to estimate mass and inertial properties. Second, we specifically wanted to avoid confounds due to practice and fatigue. Thus, to minimize these confounds, we could use neither multiple repetitions nor trials much longer than 5 s each as the testing session already lasted close to 2 h. Therefore, we have refrained from implying that the perceptual reports of participants imply a central tendency or a stable psychophysical measure. Finally, we also want to clarify that we did not use a mean of the two values for each combination of wrist angle, wrist angular kinematics, and object but instead, considered both values.
Another limitation of the present study is that during the 5 s trial period, the baseline position of the wrist (either radial or ulnar) may have drifted to reach a more natural neutral position. Furthermore, the static moment and the moment of inertia of the objects may have also influenced the magnitude of drift. Although we instructed the participants to minimize the movement amplitude in the 2-Hz and 3-Hz dynamic conditions, any amount of wrist movement may have influenced the baseline wrist angle. Although we did not have data to verify that participants maintained the required wrist angle, any potential differential interaction effects of wrist angle and wrist angular kinematics on perceived heaviness and length suggest that, for the most part, this factor failed to register any interaction effects of wrist angle, wrist angular kinematics, and object on perceived heaviness and length further supports this assertion.
Implications for the physiological study of effortful touch
The present results indicate that parsing of different mechanoreceptors for different perceptual functions is not so cut and dry. The nervous system’s emerging portrait seems to respect a fluid use of afference from specific mechanoreceptors—this fluidity might look slippery and ambiguous. However, the ecological approach to perception offers a long history of evidence within which these results fit neatly. For instance, bare intention sets constraints on which motor units contract before the volitional movement begins to act out of instructions (Gurfinkel et al. 1971; Latash 1993). The organizational framework for context-sensitive intentional action is not specific to mechanoreceptor classes but rather interactions across scales, in which information from movement is co-determined by intention no less than the mechanoreceptors (Latash 2020).
The ecological approach to perception seeks to refocus how physiology might support perception. Thus, lifting the burden of explaining haptic perceptual responses from the rhetorical shoulders of mechanoreceptor classes does not entail a loss of physiological specificity. It only allows the realigning our appeal to physiological causes along a multiscaled architecture. The bodywide tensions exerted by connective tissues (e.g., spanning muscles and joints) give the organism a tensional integrity—sometimes called ‘tensegrity’ (Ingber 2006). Tensegrity offers a fast, global substrate whose tensile properties offer an adaptive platform for the relatively slow, local neural dynamics (Turvey and Fonseca 2014). A key signature of tensegrity is multifractality, a mathematical property with various physiological applications (Frost et al. 2017) and an entailment of these tissues exhibiting exquisite interactions across many scales. Although the present results do not speak to this multifractal structure, alternative analyses of these same perceptual judgments have shown that the bodywide flow of multifractality predicts trial-by-trial judgments of heaviness and length (Mangalam and Kelty-Stephen 2020; Mangalam et al. 2020a, c, b). Hence, while manipulating intent and movement, the slippery appearance of each mechanoreceptor class’s role may offer a glimpse of tensegrity dynamics.
References
Al-Falahe NA, Nagaoka M, Vallbo AKEB (1990) Response profiles of human muscle: afferents during active finger movements. Brain 113:325–346. https://doi.org/10.1093/brain/113.2.325
Amazeen EL, Turvey MT (1996) Weight perception and the haptic size–weight illusion are functions of the inertia tensor. J Exp Psychol Hum Percept Perform 22:213–232. https://doi.org/10.1037/0096-1523.22.1.213
Amazeen EL, Tseng PH, Valdez AB, Vera D (2011) Perceived heaviness is influenced by the style of lifting. Ecol Psychol 23:1–18. https://doi.org/10.1080/10407413.2011.539100
Aniss AM, Gandevia SC, Milne RJ (1988) Changes in perceived heaviness and motor commands produced by cutaneous reflexes in man. J Physiol 397:113–126. https://doi.org/10.1113/jphysiol.1988.sp016991
Blemker SS, Pinsky PM, Delp SL (2005) A 3D model of muscle reveals the causes of nonuniform strains in the biceps brachii. J Biomech 38:657–665. https://doi.org/10.1016/j.jbiomech.2004.04.009
Brooks J, Allen TJ, Proske U (2013) The senses of force and heaviness at the human elbow joint. Exp Brain Res 226:617–629. https://doi.org/10.1007/s00221-013-3476-6
Burnham KP, Anderson DR (2002) Model selection and multimodel inference: a practical information-theoretic approach. Springer-Verlag, New York
Carello C, Turvey MT (2000) Rotational invariance and dynamic touch. In: Heller MA (ed) Touch, representation and blindness. Oxford University Press, New York, pp 27–66
Carello C, Fitzpatrick P, Domaniewicz I et al (1992) Effortful touch with minimal movement. J Exp Psychol Hum Percept Perform 18:290–302. https://doi.org/10.1037/0096-1523.18.1.290
Carello C, Kinsella-Shaw J, Amazeen EL, Turvey MT (2006) Peripheral neuropathy and object length perception by effortful (dynamic) touch: a case study. Neurosci Lett 405:159–163. https://doi.org/10.1016/j.neulet.2006.06.047
Fallon JB, Macefield VG (2007) Vibration sensitivity of human muscle spindles and golgi tendon organs. Muscle Nerve 36:21–29. https://doi.org/10.1002/mus.20796
Feys J (2016) Nonparametric tests for the interaction in two-way factorial designs using R. R J 8:367–378
Fitzpatrick P, Carello C, Turvey MT (1994) Eigenvalues of the inertia tensor and exteroception by the “muscular sense.” Neuroscience 60:551–568. https://doi.org/10.1016/0306-4522(94)90264-X
Frost JJ, Pienta KJ, Coffey DS (2017) Symmetry and symmetry breaking in cancer: a foundational approach to the cancer problem. Oncotarget 9(14):11429–11440
Fultot M, Adrian Frazier P, Turvey MT, Carello C (2019) What are nervous systems for? Ecol Psychol 31:218–234. https://doi.org/10.1080/10407413.2019.1615205
Gandevia SC, McCloskey DI (1977a) Sensations of heaviness. Brain 100:345–354. https://doi.org/10.1093/brain/100.2.345
Gandevia SC, McCloskey DI (1977b) Effects of related sensory inputs on motor performances in man studied through changes in perceived heaviness. J Physiol 272:653–672. https://doi.org/10.1113/jphysiol.1977.sp012065
Gandevia SC, McCloskey DI (1977c) Changes in motor commands, as shown by changes in perceived heaviness, during partial curarization and peripheral anaesthesia in man. J Physiol 272:673–689. https://doi.org/10.1113/jphysiol.1977.sp012066
Gibson JJ (1979) The ecological approach to visual perception. Houghton Mifflin, Boston
Gurfinkel VS, Kots YM, Krinskiy VI et al (1971) Concerning tuning before movement. In: Gelfand IM, Gurfinkel VS, Fomin SV, Tsetlin ML (eds) Models of the structural-functional organization of certain biological systems. MIT Press, Cambridge, pp 361–372
Henry CA, McNulty IM, Durst WA et al (2005) Interactions between muscle fibers and segment boundaries in zebrafish. Dev Biol 287:346–360. https://doi.org/10.1016/j.ydbio.2005.08.049
Hurvich CM, Tsai C-L (1989) Regression and time series model selection in small samples. Biometrika 76:297–307. https://doi.org/10.1093/biomet/76.2.297
Hurvich CM, Tsai C-L (1995) Model selection for extended quasi likelihood models in small samples. Biometrics 51:1077–1084. https://doi.org/10.2307/2533006
Ingber DE (2006) Cellular mechanotransduction: putting all the pieces together again. FASEB J 20:811–827. https://doi.org/10.1096/fj.05-5424rev
Kandel ER, Schwartz JH, Jessell TM et al (2000) Principles of neural science. McGraw-Hill, New York
Kelty-Stephen DG, Eddy CL (2015) Self-trained perception need not be veridical: Striking can exaggerate judgment by wielding and can transfer exaggeration to new stimuli. Atten Percept Psychophys 77:1854–1862. https://doi.org/10.3758/s13414-015-0947-9
Kingma I, Beek PJ, van Dieën JH (2002) The inertia tensor versus static moment and mass in perceiving length and heaviness of hand-wielded rods. J Exp Psychol Hum Percept Perform 28:180–191. https://doi.org/10.1037/0096-1523.28.1.180
Kingma I, van de Langenberg R, Beek PJ (2004) Which mechanical invariants are associated with the perception of length and heaviness of a nonvisible handheld rod? Testing the inertia tensor hypothesis. J Exp Psychol Hum Percept Perform 30:346–354. https://doi.org/10.1037/0096-1523.30.2.346
Latash ML (1993) Control of human movement. Human Kinetics, Champaign
Latash ML (2020) On primitives in motor control. Mot Control 24:318–346. https://doi.org/10.1123/mc.2019-0099
Lederman SJ, Ganeshan SR, Ellis RE (1996) Effortful touch with minimum movement: revisited. J Exp Psychol Hum Percept Perform 22:851–868. https://doi.org/10.1037/0096-1523.22.4.851
Lu X, Yao X, Thompson WF, Hu L (2020) Three distinct neural mechanisms support movement-induced analgesia. bioRxiv. https://doi.org/10.1101/2020.05.14.097261
Luu BL, Day BL, Cole JD, Fitzpatrick RC (2011) The fusimotor and reafferent origin of the sense of force and weight. J Physiol 589:3135–3147. https://doi.org/10.1113/jphysiol.2011.208447
Maddaluno O, Guidali G, Zazio A et al (2020) Touch anticipation mediates cross-modal Hebbian plasticity in the primary somatosensory cortex. Cortex 126:173–181. https://doi.org/10.1016/j.cortex.2020.01.008
Mangalam M, Kelty-Stephen DG (2020) Multiplicative-cascade dynamics supports whole-body coordination for perception via effortful touch. Hum Mov Sci 70:102595. https://doi.org/10.1016/j.humov.2020.102595
Mangalam M, Barton SA, Wagman JB et al (2017) Perception of the length of an object through dynamic touch is invariant across changes in the medium. Atten Percept Psychophys 79:2499–2509. https://doi.org/10.3758/s13414-017-1403-9
Mangalam M, Conners JD, Fragaszy DM, Newell KM (2018a) Location of a grasped object’s effector influences perception of the length of that object via dynamic touch. Exp Brain Res 236:2107–2121. https://doi.org/10.1007/s00221-018-5287-2
Mangalam M, Wagman JB, Newell KM (2018b) Temperature influences perception of the length of a wielded object via effortful touch. Exp Brain Res 236:505–516. https://doi.org/10.1007/s00221-017-5148-4
Mangalam M, Carver NS, Kelty-Stephen DG (2020a) Global broadcasting of local fractal fluctuations in a bodywide distributed system supports perception via effortful touch. Chaos Solitons Fractals 135:109740. https://doi.org/10.1016/j.chaos.2020.109740
Mangalam M, Carver NS, Kelty-Stephen DG (2020b) Multifractal signatures of perceptual processing on anatomical sleeves of the human body. J R Soc Interface 17:20200328. https://doi.org/10.1098/rsif.2020.0328
Mangalam M, Chen R, McHugh TR et al (2020c) Bodywide fluctuations support manual exploration: fractal fluctuations in posture predict perception of heaviness and length via effortful touch by the hand. Hum Mov Sci 69:102543. https://doi.org/10.1016/j.humov.2019.102543
Michaels CF, Weier Z, Harrison SJ (2007) Using vision and dynamic touch to perceive the affordances of tools. Perception 36:750–772. https://doi.org/10.1068/p5593
Pagano CC, Cabe PA (2003) Constancy in dynamic touch: length perceived by dynamic touch is invariant over changes in media. Ecol Psychol 15:1–17. https://doi.org/10.1207/S15326969ECO1501_01
Pagano CC, Donahue KG (1999) Perceiving the lengths of rods wielded in different media. Percept Psychophys 61:1336–1344. https://doi.org/10.3758/BF03206184
Palatinus Z, Dixon JA, Kelty-Stephen DG (2013) Fractal fluctuations in quiet standing predict the use of mechanical information for haptic perception. Ann Biomed Eng 41:1625–1634. https://doi.org/10.1007/s10439-012-0706-1
Palatinus Z, Kelty-Stephen DG, Kinsella-Shaw J et al (2014) Haptic perceptual intent in quiet standing affects multifractal scaling of postural fluctuations. J Exp Psychol Hum Percept Perform 40:1808–1818. https://doi.org/10.1037/a0037247
Pinheiro J, Bates D, DebRoy S, et al (2018) nlme: linear and nonlinear mixed effects models. R Packag version 31–137
Profeta VLS, Turvey MT (2018) Bernstein’s levels of movement construction: a contemporary perspective. Hum Mov Sci 57:111–133. https://doi.org/10.1016/j.humov.2017.11.013
Proske U, Allen T (2019) The neural basis of the senses of effort, force and heaviness. Exp Brain Res 237:589–599. https://doi.org/10.1007/s00221-018-5460-7
Proske U, Gandevia SC (2012) The proprioceptive senses: their roles in signaling body shape, body position and movement, and muscle force. Physiol Rev 92:1651–1697. https://doi.org/10.1152/physrev.00048.2011
Rouder JN, Morey RD, Speckman PL, Province JM (2012) Default Bayes factors for ANOVA designs. J Math Psychol 56:356–374. https://doi.org/10.1016/j.jmp.2012.08.001
Sakamoto T, Kondo T (2017) Awareness of movement does not facilitate robot-assisted passive motor learning. Adv Robot 31:24–28. https://doi.org/10.1080/01691864.2016.1249026
Savelberg HHCM, Willems PJB, Baan GC, Huijing PA (2001) Deformation and three-dimensional displacement of fibers in isometrically contracting rat plantaris muscles. J Morphol 250:89–99. https://doi.org/10.1002/jmor.1061
Siebert T, Rode C, Till O et al (2016) Force reduction induced by unidirectional transversal muscle loading is independent of local pressure. J Biomech 49:1156–1161. https://doi.org/10.1016/j.jbiomech.2016.02.053
St MR, Talebkhah KS (2018) Neurological evidence of a mind-body connection: mindfulness and pain control. Am J Psychiatry Resid J 13:2–5. https://doi.org/10.1176/appi.ajp-rj.2018.130401
Streit M, Shockley K, Riley MA (2007a) Rotational inertia and multimodal heaviness perception. Psychon Bull Rev 14:1001–1006. https://doi.org/10.3758/BF03194135
Streit M, Shockley K, Riley MA, Morris AW (2007b) Rotational kinematics influence multimodal perception of heaviness. Psychon Bull Rev 14:363–367. https://doi.org/10.3758/BF03194078
Taylor AM, Christou EA, Enoka RM (2003) Multiple features of motor-unit activity influence force fluctuations during isometric contractions. J Neurophysiol 90:1350–1361. https://doi.org/10.1152/jn.00056.2003
Team RC (2013) R: A language and environment for statistical computing. Comput 1. https://doi.org/10.1890/0012-9658(2002)083[3097:CFHIWS]2.0.CO;2
Thomas BJ, Riley MA, Wagman JB (2019) Information and its detection: The consequences of Gibson’s theory of information pickup. In: Wagman JB, Blau JJC (eds) Perception as information detection: reflections on Gibson’s ecological approach to visual perception. Routledge, New York, pp 237–252
Turvey MT, Carello C (2011) Obtaining information by dynamic (effortful) touching. Philos Trans R Soc Lond B Biol Sci 366:3123–3132. https://doi.org/10.1098/rstb.2011.0159
Turvey MT, Fonseca ST (2014) The medium of haptic perception: a tensegrity hypothesis. J Mot Behav 46:143–187. https://doi.org/10.1080/00222895.2013.798252
Turvey MT, Burton G, Amazeen EL et al (1998) Perceiving the width and height of a hand-held object by dynamic touch. J Exp Psychol Hum Percept Perform 24:35–48. https://doi.org/10.1037/0096-1523.24.1.35
Turvey MT, Shockley K, Carello C (1999) Affordance, proper function, and the physical basis of perceived heaviness. Cognition 73:B17–B26. https://doi.org/10.1016/S0010-0277(99)00050-5
van de Langenberg R, Kingma I, Beek PJ (2006) Mechanical invariants are implicated in dynamic touch as a function of their salience in the stimulus flow. J Exp Psychol Hum Percept Perform 32:1093–1106. https://doi.org/10.1037/0096-1523.32.5.1093
von Holst E, Mittelstaedt H (1950) Das reafferenzprinzip. Naturwissenschaften 37:464–476. https://doi.org/10.1007/BF00622503
Waddell ML, Amazeen EL (2017) Evaluating the contributions of muscle activity and joint kinematics to weight perception across multiple joints. Exp Brain Res 235:2437–2448. https://doi.org/10.1007/s00221-017-4979-3
Waddell ML, Amazeen EL (2018) Lift speed moderates the effects of muscle activity on perceived heaviness. Q J Exp Psychol 71:2174–2185. https://doi.org/10.1177/1747021817739784
Waddell ML, Fine JM, Likens AD et al (2016) Perceived heaviness in the context of Newton’s Second Law: combined effects of muscle activity and lifting kinematics. J Exp Psychol Hum Percept Perform 42:363–374. https://doi.org/10.1037/xhp0000151
Wagman JB, Carello C (2003) Haptically creating affordances: the user-tool interface. J Exp Psychol Appl 9:175–186. https://doi.org/10.1037/1076-898X.9.3.175
Yuan C, Arora A, Garofalo AM, Grange RW (2021) Potential cross-talk between muscle and tendon in Duchenne muscular dystrophy. Connect Tissue Res 62:40–52. https://doi.org/10.1080/03008207.2020.1810247
Author information
Authors and Affiliations
Contributions
MM conceived and designed research; MM performed experiments; MM and ND analyzed data; MM, ND, and DGK-S interpreted results of experiments; MM prepared figures; MM drafted manuscript; MM, ND, and DGK-S edited and revised manuscript; MM, ND, and DGK-S approved final version of manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that no competing interests exist.
Additional information
Communicated by Melvyn A. Goodale.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Mangalam, M., Desai, N. & Kelty-Stephen, D.G. Proprioceptive afferents differentially contribute to effortful perception of object heaviness and length. Exp Brain Res 239, 1085–1098 (2021). https://doi.org/10.1007/s00221-021-06045-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-021-06045-4