
Abstract
Stability is the ability of a system to maintain a desired static or dynamic motor pattern. Maneuverability, on the other hand, is the ability to transition between motor patterns, and it is antagonistic to stability. Animals frequently reduce the stability of an ongoing task to facilitate anticipated movement transitions. Such stability–maneuverability tradeoffs are observed in human locomotion. However, the notion applies to other behaviors and this paper reports the first study on the stability–maneuverability tradeoff in human prehension. We tested if the coordination between the digit forces during the manipulation of a hand-held object is altered in response to an expected change in the manipulation pattern. We focused on the coupling between the grip and the load force and between the opposing forces exerted by the thumb and the four fingers, and on the transition from rhythmic vertical oscillation to non-vertical oscillation of the object. The nature of these couplings depends on the oscillation direction. Therefore, the stability–maneuverability tradeoff predicts that an expected volitional change to the object’s movement will diminish the strength of these couplings so that the force patterns generating the current movement can efficiently transition into new ones that generate the new movement. The strength of the grip–load coupling did not alter in tasks that required a change in movement compared to tasks that did not. We speculate that participants preferred safety over maneuverability and maintained the grip–load coupling strength to counter high inertial loads and avoid object slip. In contrast, the strength of the coupling between the thumb and the four fingers’ opposing forces reduced in tasks that required a change in movement compared to tasks that did not. Thus, the stability-reduction aspect of the stability–maneuverability tradeoff occurs in prehensile behavior. Future work should focus on associating the reduction in stability with gains in maneuverability, and on developing a comprehensive account of this tradeoff in prehensile tasks.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Stability and maneuverability of action are important attributes of a healthy motor system that enable human beings to execute functional movements. Stability is the ability of a system to maintain a desired static or dynamic motor state by rejecting neuromuscular and environmental noise. Maneuverability is the ability to transition between motor states, and it is usually thought to be antagonistic to stability. Studies in comparative biology suggest that biomechanical traits influence overall maneuvering capacity of animals (Fish 2002; Dakin et al. 2018). However, skill or neural control of movement and neuromuscular health also play a part in determining the maneuvering capacity of individual animals. Individuals will often trade off stability to enhance maneuverability. That is, the stability of the current task is reduced to facilitate an anticipated motor transition (Riccio and Stoffregen 1988; Riccio 1993; Riley and Turvey 2002; Hasan 2005; Huang and Ahmed 2011; Tillman and Ambike 2018a). Such stability–maneuverability tradeoffs have been observed in humans in locomotion (Acasio et al. 2017) and posture control tasks (Huang and Ahmed 2011). Although this tradeoff is usually discussed in the context of locomotion, the notion applies to other behaviors, and the current paper reports the first study on the stability–maneuverability tradeoff in human prehension.
Maneuverability in prehensile behavior refers to the transitions between patterns of object manipulation. This is a component of manual dexterity (Santisteban et al. 2016), and it is a critical ability that enables tool use in humans. The objective of this work is to test if the stability-reduction aspect of the stability–maneuverability tradeoff occurs in manual prehension. We test if the stability of prehensile forces reduces in response to anticipated volitional changes in the prehensile task. Anticipatory control is a dominant feature of volitional prehensile actions. It manifests in the near simultaneous changes in grip force with changes in load forces that occur (1) during manipulation (Johansson and Westling 1984; Flanagan et al. 1993; Flanagan and Wing 1993, 1995; Flanagan and Tresilian 1994; Viviani and Lacquaniti 2015), (2) due to self-induced perturbations to objects (Flanagan and Wing 1993; Scholz and Latash 1998; Danion 2004; Shim et al. 2006), (3) while moving an object against a predictable external load (Hermsdorfer and Blankenfeld 2008), and (4) in anticipation of an impact between the hand-held object and the environment (Kuling et al. 2019). Anticipatory control is also apparent in the use of sensorimotor memory in the handling of familiar objects: grip force for lifting an object is pre-planned based on the experience of lifting the same or similar objects in the past (Johansson and Westling 1984; Gordon et al. 1993; Quaney et al. 2003; Johansson and Flanagan 2009; Fu et al. 2010). However, the manipulation tasks used in prehension studies are typically predefined (grasp and lift, oscillate the object, etc.), and the effect of uncertainty in the transition between manipulation behaviors is rarely studied. It is not known if grip characteristics during an ongoing manipulation pattern change in response to an anticipated volitional transition into another manipulation pattern.
Therefore, in this study we quantified the alteration in the stability of grip characteristics that facilitate anticipated changes in the direction of oscillation of a hand-held object. During the vertical oscillation of a vertically grasped object, we assessed the strength of two well-known couplings in human prehension: the grip-force–load-force coupling and the coupling between the pressing forces applied by the thumb and the fingers. We performed these assessments when the participant neither expected nor changed the direction of oscillation, and when the participant expected to change the oscillation direction in response to a cue and compared the coupling strengths across the two task types.
The participant held an object in a prismatic grasp with the distal phalanges of the thumb and the four fingers pressing on the object’s surfaces in opposition to each other (Fig. 1). When the object is static, these opposing forces are equal, and they yield the grip force (see “Methods” for operational definition). The normal pressing force at each digit–object interface creates friction that balances the load force due to the object’s weight and the inertial forces along the digit–object contact surface during manipulation (Flanagan et al. 1993). When moving a vertically oriented object in the vertical direction, the grip and load forces covary positively, and this phenomenon is the grip-force–load-force coupling (Johansson and Westling 1984). Furthermore, the normal forces applied by the thumb and the virtual finger [an imaginary finger which produces force and moment equal to the resultant of the forces and moments produced by the four fingers (Arbib et al. 1985)] must cancel out while grasping an object with zero horizontal acceleration. However, during vertical oscillation, the normal force magnitudes change according to the grip-force–load-force coupling (henceforth called ‘grip–load coupling’). This implies that the normal force magnitudes covary positively to minimize the horizontal movement of the object, thus yielding the coupling between the thumb and virtual finger normal forces (Gao et al. 2005; Slota et al. 2011).

Instrumented object. Five digits of the right hand on five force transducers. Normal (red) and vertical tangential (green) forces at the interface of each digit and transducer are shown. A motion capture system tracked the positions of four reflective markers fixed to the object
The grip–load coupling arises from the continuous feedforward specification of the grip force magnitude (Flanagan and Wing 1997; Johansson and Flanagan 2009), or other control variables such as referent digit positions that yield the grip force (Pilon et al. 2007; Ambike et al. 2015). However, recent evidence has emerged that the control of grip force (or of latent control variables responsible for the grip force) can become intermittent, resulting in intermittent (i.e., weaker or less stable) grip–load coupling (Grover et al. 2018, 2019). This can occur when highly predictable fluctuations in the load lead to a low possibility of object slip, e.g., when the movement is deterministic (Grover et al. 2019) and/or the environmental disturbances are small (Hadjiosif and Smith 2015). Here, we test the hypothesis that a similar reduction in the stability of this coupling will occur when a volitional alteration in the manipulation pattern is expected (hypothesis 1). Note that in this case, the ongoing movement is highly deterministic. However, an event will occur in the near future during which the nervous system must alter the grip force pattern to compensate for a new load force pattern that will result from a different movement.
Similarly, the nature of the thumb–virtual finger normal force coupling (henceforth called ‘thumb–virtual finger coupling’) is different when the object is moved in non-vertical directions. For example, horizontal oscillation of the object requires an oscillating net horizontal force (Kerr and Roth 1986; Yoshikawa and Nagai 1991), which is achieved through negative covariation between the thumb and virtual finger normal force magnitudes (Gao et al. 2005; Slota et al. 2011). Therefore, to transition from vertical to horizontal oscillation of the object, the thumb and virtual finger normal force magnitudes must transition from positive covariation to negative covariation. Similar changes, but of smaller magnitude, must occur for transitioning from vertical to oblique oscillations. The phenomenon of anticipatory synergy adjustment documents such changes in tasks in which the four fingers together produce one pressing force (Olafsdottir et al. 2005, 2007, 2008; Shim et al. 2005; Tillman and Ambike 2018a, b). In these studies, the four finger forces covary negatively to maintain the total pressing force, and they covary positively when the total force must be changed. When individuals are required to transition from producing constant total force to producing a rapid change in total force, the strength of the negative covariation in the forces diminishes before the total force changes. Therefore, our second hypothesis is that the strength of the thumb-virtual finger coupling will be lower when a change in oscillation direction from vertical to non-vertical is expected compared to when it is not.
Furthermore, it is plausible that stability adjustments scale proportionally with the perceived difficulty of the task. This is consistent with the view that the central nervous system utilizes probabilistic models of the task to optimize performance (Kording and Wolpert 2004; Wolpert and Landy 2012). Such a model will assess a task with a larger response set (i.e., the anticipated change in oscillation direction may be in one of several possible directions), or tasks where the direction and/or timing of oscillation change is unknown, as harder tasks, and the nervous system may respond by weakening the couplings more to maintain the performance of the transitions. Therefore, our third hypothesis is that the coupling strengths will reduce more for tasks with larger response sets, and our fourth hypothesis is that the coupling strength will be lower for reaction-time tasks compared to tasks where the timing and nature of the change is known (‘self-paced’ tasks).
Methods
Participants
Twenty healthy young individuals [11 females; age = 23.2 ± 3.1 years; weight = 67.5 ± 11.1 kg; height = 1.69 ± 0.08 m; (mean ± standard deviation)] volunteered to participate in this study. All participants were right-hand dominant by self-report [hand length measured from hand base to the tip of middle finger = 18.8 ± 2.1 cm; hand breadth measured across distal ends of metacarpal bones = 8.3 ± 0.6 cm], and no participant had any history of neurological disease or musculoskeletal disorder or injury in the upper arm. All participants provided written informed consent in accordance with procedures approved by the Institutional Review Board of Purdue University.
Equipment
Participants grasped an instrumented object weighing 325 g with the digit tips of their right hand (Fig. 1). Five six-component (three-force and three-moment components) force transducers (four Nano 17-E and one Nano 25-E, ATI Industrial Automation, Garner, NC) were mounted on the object as shown in Fig. 1. Center-to-center distance between Nano 17-E transducers was fixed at 30 mm, and the Nano 25-E transducer was mounted directly opposite to the transducer for the middle finger. The force transducers measured forces applied by fingers and the thumb. Sandpaper (100C medium grit) was glued on the surface of each transducer to increase the coefficient of friction between the transducer and the digit. Output signals from the transducers were collected using the MotionMonitor software (Innovative Sports Training Inc.) and sampled at 1000 Hz. Transducers were zeroed while resting the object vertically on the table prior to the start of each experimental session.
We recorded the position of the object in three-dimensional space at 250 Hz using the a seven-camera (Vicon Vero VE22-S) Vicon Motion Capture System (Vicon, Oxford, UK) and four reflective markers attached to the object (Fig. 1). The motion capture system was calibrated for each participant and the tracking error was less than 1 mm inside the capture volume.
Experimental setup
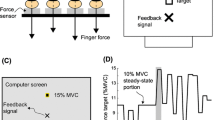
Before the start of the experiment, participants cleaned the digit tips of their right hand using alcohol wipes to normalize the skin condition. Then, they sat upright on a piano bench facing a computer screen and a square frame placed on a table (Fig. 2a). The world co-ordinate system for quantifying the movement kinematics was defined as shown in Fig. 2a. The square frame was placed in front of the participant at a distance equal to the participant’s arm length measured from the acromion. The height of the frame was adjusted so that the centroid of the frame coincided with the participant’s right acromion. The length of each side of the square frame was adjusted to 25% of the participant’s arm length. A reference line was marked on the table along the medio-lateral direction, half-way between the frame and the participant. Participants were instructed to grasp the object by placing their fingertips at the center of transducers and to hold it stationary and vertically above this reference line such that the object’s top surface coincided with the frame’s bottom edge from their point of view. The participants were then required to perform oscillatory movements along different directions in the frontal plane while maintaining the object’s vertical orientation and position above the reference line. Horizontal and vertical sides of the frame defined the amplitude of the oscillations, and an auditory metronome set at three beats per second defined the frequency of the oscillations. Participants were instructed to move the object such that they were at the extreme position in the cycle at each beat of the metronome. Therefore, the target oscillation frequency was 1.5 Hz.

Experimental setup (a). Computer screen and the square frame (b). The computer screen displayed a yellow rectangle at different positions: north (shown in yellow), east (to the right), northwest (top right corner), and northeast (top left corner). Corresponding oscillation directions are also shown
The computer screen provided visual cues in the form of a yellow rectangle whose position indicated the direction of oscillation (Fig. 2b). There were four possible positions of the movement-direction cue (north, east, northwest, and northeast), and four corresponding oscillation directions. When the cue was in the north position, participants performed vertical oscillations of the object between the top and bottom edges of the square frame such that the top surface of the object coincided with these edges from their point of view. When the cue was in the east position, participants performed horizontal oscillations of the object between the side edges of the frame such that the vertical axis of the object coincided with these edges. When the cue was in the northwest position, participants performed oblique oscillations between the top-left corner and the bottom-right corner of the frame such that the top surface of the object coincided with these corners. Similarly, when the cue was in the northeast position, participants performed oscillations along the other diagonal of the square frame. The computer screen and the frame were placed close to each other so that the cue on the screen was within the participant’s peripheral vision and they could focus on the frame during the oscillations.
Experimental procedure
All participants performed five types of experimental tasks with six trials per task. Each trial began with the participant holding the object stationary over the reference line. After 2 s, the movement-direction cue appeared on the screen, and participants began oscillatory movements. All 30 trials began with vertical oscillation of the object.
In the steady task, the cue appeared in the north position on the screen and did not change its position for the duration of the trial. Therefore, the participants performed only vertical oscillations. Each trial lasted for 15 s.
There were three reaction-time tasks in which the participants were required to change the oscillation direction in response to a jump in the cue position on the screen. The size of the response set varied across the three tasks, and each trial had multiple changes in cue position. In the 1-choice task, the cue switched between the north and the east position, staying at each location for a variable duration. Thus, the size of the response set was one (a simple reaction-time task). In the 2-choice task, the cue switched between north, east, and northwest positions randomly, staying at each location for variable durations. Therefore, the cue could switch to two possible positions at any time. In the 3-choice task, the cue switched between north, east, northwest, and northeast positions randomly, staying at each location for a variable duration. Hence, the cue could switch to three possible positions at any time. Each reaction-time task contained five to six changes in oscillation direction and lasted 25 s.
Finally, in the self-paced task, the cue first appeared in the north position. Nine seconds later, it moved to the east position and remained there till the completion of the trial. Before jumping to the east position, two short audio beeps at the seventh and ninth seconds cued the participant to change the oscillation direction from vertical to horizontal. Participants were instructed to change the direction of oscillation at a self-selected pace and not as quickly as possible. Each trial lasted 18 s.
All five tasks were block randomized across participants. We designed six unique target sequences for each reaction-time task. The order of administration of these sequences was randomized within each block. Three out of the six sequences contained an initial vertical oscillation period between 7 and 9 s. A portion of the participants’ behavior during this initial period was utilized for data analysis. The other three sequences contained a shorter vertical oscillation period between 3 and 6 s. This minimized the possibility that the participants guessed the first switch in the target location. Since the period of vertical oscillation was shorter, the data from these three trials was not utilized for analysis.
It is critical to note that, prior to the start of each experimental block, the participants were informed about the nature of the task, i.e., whether the oscillation direction will change, and the size of the response set if it did. This is the way we manipulate the participant’s anticipation regarding the required transitory behavior. Participants performed six to eight practice trials before the start of data collection. Each practice trial started with vertical oscillation of the object, included transitions between oscillation directions, included oscillations in all directions and lasted 15 s each. The target sequences used for practice were different from those used in the experimental tasks.
Participants rested for 30 s between trials, and additional rest periods were provided if participants felt fatigue in their arm or digits. Furthermore, participants were encouraged to ask for additional rest whenever required. None of our participant requested additional rest, and none of the participants reported fatigue during the protocol.
Data analysis
MATLAB programs were written for data analysis (R2017a The MathWorks Inc). We analyzed the data from 21 trials: six trials from the steady task and the self-paced tasks each, and three trials from each of the three reaction-time tasks for each participant. Recall that three of the six trials for each reaction-time task were sham trials since the movement transition was elicited early, therefore, these were not analyzed. All finger-force data and kinematic data were low-pass filtered at a cutoff frequency of 10 Hz using a fourth-order, zero-lag Butterworth filter. For the steady task, we analyzed data from the 4th second to the 9th second after the start of the trial (Fig. 3a), since this window coincided roughly with the analysis windows selected for all other task types. For reaction-time tasks, we analyzed five seconds of data immediately preceding the first switch in the target location (Fig. 3b). For the self-paced task, we analyzed five seconds of data before the first beep (Fig. 3c). We selected data during this epoch for the self-paced task since our hypotheses pertain to behavior changes in response to the experimenter’s instruction at the start of the experimental block, and we are interested in the behavior prior to the initiation of a transition. The data analysis involved (1) digit force and load force computations, (2) grip force and load force linear cross-correlation analysis, and (3) cross recurrence quantification analysis between (a) grip force and load force, and (b) thumb normal force and virtual finger normal force. Recall that the virtual finger is an imaginary finger that produces force and moment equal to the resultant of forces and moments produced by all fingers (Arbib et al. 1985).

Thumb normal force of a representative subject for the steady task (a), 3-choice reaction-time task (b), and self-paced task (c). The time windows isolated for analyses are shown as shaded rectangles
Digit force and load force computations
We computed grip force, load force, and virtual finger normal force from the filtered force sensor readings. Grip force was defined as the summation of the thumb and the virtual finger normal force absolute values during vertical oscillations (Slota et al. 2011). The object orientation changed minimally during vertical oscillation. Therefore, the vertical tangential force expressed in the sensor-fixed coordinate frame for each digit was summed to obtain the load force. The load force is the weight of the object plus mass times its vertical acceleration. The thumb normal force was directly available from the sensor and the virtual finger normal force was the summation of normal forces of index, middle, ring, and little fingers.
Correlational analyses
Linear cross-correlation analysis was performed to determine the correlation at zero lag (Gao et al. 2005), the maximum (max) cross correlation, and the lag (Flanagan and Tresilian 1994; Blank et al. 2001) between the grip and the load force and between the thumb and virtual finger normal forces. The value of the two correlations quantify the strength or stability of coupling between the force pairs, with higher values indicating stronger coupling.
Cross recurrence quantification analysis
In contrast to the traditional view, recent work shows that the grip–load coupling is intermittent if the load force changes during the manipulation are small (Grover et al. 2018), or when the movement is highly predictable (Grover et al. 2019). These observations were obtained using non-linear time series analyses that provide a comprehensive assessment of the time-varying properties of the coupling. Such information may be missed by linear correlational analyses. Therefore, to quantify the strength or stability of the two force couplings, we employed cross recurrence quantification analysis (CRQA), a type of nonlinear time series analysis for investigating the recurrent behavior of two processes. This analysis describes how the interaction between the two processes evolves over time by quantifying how they visit common locations in a reconstructed phase space (Webber and Zbilut 1994; Marwan and Kurths 2002).
CRQA proceeds in three steps. First, both time series are represented in a reconstructed phase space. Second, a cross-recurrence plot is constructed that identifies the locations where the two phase-space trajectories are within a pre-defined distance ‘R’ from each other. Finally, output measures are computed from the cross-recurrence plot. Three input parameters—the embedding dimension (m), time delay (τ) and radius (R)—must be identified to conduct this analysis. We identified embedding dimension using the recommendations of (Abarbanel et al. 1993), time delay based on the recommendations of (Hasson et al. 2008), and radius based on the recommendations of (Zbilut et al. 2002). Table 1 provides the values used in this paper. The maximum normalized distance was used to measure proximity between points in the phase space, and a line segment was defined by three or more consecutive points in the cross recurrence plot.
Our preliminary analysis revealed high frequency of diagonal line structures in the cross-recurrence plots. If recurrent states, i.e., instants when the two processes occupy the same locations in the phase space, form a diagonal line in the cross-recurrence plot, it indicates that the two trajectories evolve similarly. We also observed that our force time series were smooth and regular (cf. Figs. 3, 4). These data yielded smooth phase-space trajectories, which precluded the use of common metrics based on the diagonal line structures—maximum and average diagonal line lengths and determinism—since they are considered unreliable (Marwan 2011). For such data, the entropy obtained from the histograms of the lengths of diagonal lines is a reliable measure for identifying the proximity of the system to a transition between deterministic (regular) and chaotic behaviors (Marwan 2011). In a tightly coupled (deterministic) system, the two processes co-evolve consistently. This yields diagonal line segments of uniform lengths, and therefore, low entropy in the corresponding histogram. Conversely, if the two processes are decoupled, the diagonal line lengths become more variable, and the corresponding histogram yields a higher entropy value. Therefore, the hypothesized decline in the coupling strength in our force signals will be reflected as higher entropy.

Forces for a representative subject for a steady task. Grip force and load force (a), and thumb and virtual finger normal forces (b)
Finally, CRQA output measures show some sensitivity to the choice of the input parameters. Therefore, we calculated entropy for a range of input parameter values (4 ≤ m ≤ 6 and 0.3 ≤ R ≤ 0.8). For each value of m, the value of τ was obtained by following the recommendation of (Hasson et al. 2008). Our initial analysis indicated that entropy was robust to variations in τ, so we limited the scope of our sensitivity analysis to variations in m and R. However, given the smooth nature of our phase-space trajectories, the minimum number of points that define a diagonal line segment was altered (between two and nine) and the sensitivity of the entropy measure to this parameter was also explored (Marwan 2011).
Statistics
Data are means ± SE, unless mentioned otherwise. We computed all output variables (correlation at zero lag, max cross correlation, lag and entropy) for each trial of each task and then averaged the output measures across the trials for each task type. The correlation at zero lag and max cross correlation values were z transformed to meet the requirement for normality. However, non-transformed values are presented in the Results section. The correlation at zero lag, max cross correlation and lag values for each task type were subjected to one-sample t tests to determine if they were significantly different from zero. We tested our hypotheses by subjecting all output measures (except lag) to separate one-way, repeated-measures ANOVA with factor task type (five levels). Mauchly’s sphericity tests were performed to verify the validity of using repeated-measures ANOVA. The Greenhouse–Geisser adjustment to the degrees of freedom was applied whenever departure from sphericity was observed. Significant effects of ANOVA were further explored using pairwise comparisons with Bonferroni corrections. All possible pairwise comparisons were conducted. All statistics were performed using an α-level of 0.05 and with SPSS statistical software (Version 24, IBM Corp.).
Results
Basic performance parameters
To characterize the overall performance of the task, we computed the amplitude of vertical movements, angular excursion of the object, the movement of the object in the horizontal plane and the oscillation frequency within the analysis windows (Fig. 3). These movement characteristics were consistent, indicating that the participants accomplished the task well. The across-participant mean (± SE) of the standard deviation of the amplitudes were 1.1 ± 0.1 cm, 1.0 ± 0.2 cm, 0.9 ± 0.1 cm, 0.8 ± 0.3 cm, and 1.0 ± 0.1 cm for the steady, 1-, 2-, and 3-choice reaction-time tasks and the self-paced task, respectively. The standard deviation of the angular excursion of the object was 5.9° ± 0.8°, 5.3° ± 0.6°, 6.5° ± 0.7°, 5.8° ± 0.6°, and 6.0° ± 0.8° for the various tasks. The standard deviation of the horizontal movement of the object was 1.56 ± 0.3 cm, 1.89 ± 0.3 cm, 2.17 ± 0.4 cm, 1.86 ± 0.3 cm, and 1.84 ± 0.3 cm, for the various tasks.
The oscillation frequencies were also consistent across participants: 1.55 ± 0.04 Hz, 1.57 ± 0.04 Hz, 1.55 ± 0.1 Hz, 1.55 ± 0.03 Hz, and 1.55 ± 0.05 Hz for the various tasks. One-sample t tests indicated that the observed frequencies were not significantly different from the target frequency of 1.5 Hz for any task (p > 0.05).
Linear correlational analysis of coupling
Figure 4 shows the time series for grip force and load force and thumb and virtual finger normal forces within the analysis window for a representative participant and for one trial for the steady task. Qualitatively, grip force changes continuously and in parallel to load force, consistent with the classical grip–load coupling (Fig. 4a). The normal forces also change continuously and in phase (Fig. 4b). Similar behavior for both pairs of forces was observed consistently during the vertical oscillations for all task types.
To contextualize our findings within the literature, we performed traditional assessments of the coupling between grip and load forces and between the thumb and virtual finger forces (Fig. 5). Grip force changed proportionally with load force as indicated by significant positive correlations for all task types (p < 0.01, one-sample t tests). Furthermore, grip–load changes occurred with minimal lag (p > 0.05 for one-sample t test, test value = 0 ms; Fig. 5b). We obtained identical results for the thumb and virtual finger force time series. These forces also change proportionally with minimal lag. The lag here was significantly different from zero for all task types (p < 0.05), except the 3-choice reaction-time task (p = 0.058). However, the magnitude of the lag is small (< 5 ms; Fig. 5e).

Mean ± SE of the linear correlation coefficients, lag and the entropy for the grip-force–load-force coupling and the coupling between the thumb and virtual finger normal forces. *Significantly different pairs (p < 0.05)
For the grip–load analysis, a main effect of task type was observed for the correlation at zero lag (F(4,76) = 3.66; p < 0.01; ηp2 = 0.16) as well as the max correlation (F(4,76) = 2.54; p < 0.05; ηp2 = 0.12). Both correlations for the 2-choice reaction-time task were lower compared to the self-paced task (Fig. 5a). For the thumb-virtual finger analysis, task type did not influence the correlation at zero lag (F(4,76) = 1.02; p = 0.4; ηp2 = 0.05) or the max cross correlation (F(4,76) = 0.89; p = 0.46; ηp2 = 0.04; Fig. 5d).
Cross recurrence quantification analysis
Cross recurrence plots for grip–load force data and thumb–virtual finger force data for a representative trial of the steady task are shown in Fig. 6. Recurrence points form diagonal lines in both the cross-recurrence plots. Such patterns were consistently observed for both force pairs and for all task types. There was an effect of task type on the entropy for the grip and load force data (F(4,76) = 2.62; p = 0.04; ηp2 = 0.12). However, there were no significant pairwise differences (Fig. 5c). There was also an effect of task type on the entropy for the thumb and virtual finger force data (F(2.63,49.90) = 3.94; p = 0.02; ηp2 = 0.17). The entropy for the 1-, 3-choice reaction-time tasks and the self-paced task were all significantly greater than that for the steady task (Fig. 5f).

a Cross recurrence plots for grip force (GF) and load force (LF), and thumb and virtual finger normal forces. b Corresponding trajectories of the normalized (z score) forces. Plots are for one representative trial of the steady task
Discussion
The objective of the present work was to evaluate if the stability of digit force patterns, as reflected in the strength of the couplings between the grip force and load force and between the thumb and the virtual finger normal forces, is reduced to facilitate anticipated transitions in the direction of oscillation of a hand-held object. Such a reduction in stability would suggest that the stability–maneuverability tradeoff occurs in human prehensile behavior.
The data did not support our first hypothesis: the anticipated change in the direction of oscillation of the hand-held object did not lead to consistent changes in the stability of the grip–load coupling. In contrast, anticipated change in oscillation direction weakened the coupling between the thumb and the virtual finger normal forces, supporting our second hypothesis. Hypothesis 3 was not supported by our data: increasing the difficulty of the task by increasing the possible number of directions in which the transition could occur (in the 1-, 2-, and 3-choice reaction-time tasks) did not change the stability of the two couplings. Finally, the grip–load coupling was lower for one of the reaction-time tasks compared to the self-paced task, partially supporting hypothesis four. We discuss these findings below.
The grip-force–load-force coupling
The grip–load coupling may be robust to anticipated changes in object manipulation patterns. Specifically, there were no differences in the linear correlational measures or entropy between the steady task and any of the reaction-time or self-paced tasks (Fig. 5a, c). Therefore, either the stability–maneuverability tradeoff does not occur for this coupling, or the tradeoff occurs, but it was not detectable with our protocol. The grip–load coupling strength may have been maintained due to safety concerns regarding object slip. Grover and colleagues have argued that the grip–load coupling becomes intermittent when the fluctuations in the load force are unlikely to cause the object to slip (Grover et al. 2018, 2019). The object used in this study was heavier than that used by Grover and colleagues. This may have imposed large inertial loads for the given oscillation frequency, and concerns regarding object slip may have prevented anticipatory reduction of the grip–load coupling. Alternatively, our finding is consistent with the findings of Nashed et al. (2017) who demonstrated that while reaching to a target with a grasped object in uncertain conditions (target location may change after initiation of the reach), the chosen reach direction is towards an average target location, but the grip force compensates for the anticipated loads associated with the average reach direction, and not for the average of the loads associated with the various reach directions. This suggest that any uncertainty in the upcoming movements is restricted to the level of arm motion and does not influence the control of grip force or the grip–load coupling. The tension between these contrasting possibilities cannot be resolved without further investigation. However, these possibilities should be considered with caution, since we are interpreting a null result.
The thumb–virtual finger normal force coupling
The stability-reduction aspect of the stability–maneuverability tradeoff is evident in the thumb–virtual finger normal force coupling. We observed that the stability of this coupling reduced when the participant expected to change the oscillation direction in the near future. This destabilization occurred whether or not the participant knew the timing and/or direction of the upcoming change, i.e., whether they performed a reaction-time task or the self-paced task. These results are consistent with anticipatory synergy adjustments (ASA) observed in isometric finger force production tasks. There, the coupling between the pressing forces produced by the four fingers reduced prior to a volitional rapid change in the current force produced by the fingers. In particular, the stability reduction occurred in reaction-time tasks (stage-1 ASA; Tillman and Ambike 2018a, b), and also in self-paced tasks where participants knew the timing and the direction of the upcoming force change (stage-2 ASA; Olafsdottir et al. 2005; Shim et al. 2005; Zhou et al. 2013).
CRQA was key to observing the change in the coupling strength of the thumb and virtual finger normal forces. The changes were evident in the entropy (Fig. 5f), but not in linear correlational measures (Fig. 5d). This is consistent with the observations of (Grover et al. 2018, 2019) who identified intermittency in grip–load coupling using CRQA. We note, however, that although CRQA is an effective technique for identifying time-varying characteristics of bivariate data, it can be sensitive to the choice of the input parameters (m, τ, R, and the minimum number of points that define a diagonal line). We computed entropy for a range of input parameter values and found that our results were robust to changes in m and the number of points that defined diagonal lines. The entropy was sensitive to changes in R, however, suggesting the need for replicating our findings.
Finally, other measures can assess the coupling strength in bivariate time series. For example, the Hurst exponent, Lyapunov exponent, Minkowski fractal dimension, and spectral exponent can quantify the coupling between the force pairs (Mandelbrot 1982; Kantz and Schreiber 1997; Marwan and Kurths 2002). We chose CRQA to maintain consistency with recent work that has begun the exploration of time-varying properties of force couplings in human prehension (Grover et al. 2018, 2019).
Effect of task difficulty on coupling strength
We were interested in exploring whether the reduction in coupling strength is a graded phenomenon. Hypotheses 3 and 4 tested the idea that the coupling strengths would decreased as the difficulty of the upcoming transition increased. This question has not been investigated in the context of prehensile behavior, and our expectations were consistent with the view that the nervous system optimizes behavior based on probabilistic models of the task. We modulated the difficulty of the transitions by changing the size of the response set across the reaction-time tasks and by changing the degree of uncertainty in the timing of the transition across the reaction-time and self-paced tasks.
The evidence supporting graded destabilization of digit force couplings is weak. We did not observe a systematic effect of the size of the response set in the reaction-time tasks on the stability of either coupling. A trend is evident in Fig. 5f, indicating a progressive weakening of the thumb–virtual finger coupling as the number of choices in the choice reaction-time task increased. However, the pairwise comparisons between the choice reaction-time tasks were not significant. For the grip–load coupling, the correlational measures for the 2-choice task were smaller than that for the self-paced task (Fig. 5a). This result provides some support for this idea. However, the evidence is weak, since this is the only significant pairwise difference, and it is not mirrored in the more sensitive entropy values. Nevertheless, the trends in our data suggest that further investigations are warranted.
Limitations
The main drawback of this work is that this experimental paradigm does not allow a clear assessment of the gains in reaction time due to anticipatory stability reduction. The steady task has no reaction time measurement, and the reaction times in the choice reaction-time tasks are expected to increase with the size of the response set according to the Hick–Hyman law (Hick 1952; Hyman 1953). Since cognitive processes are responsible for this increase, the challenge is to parse information-processing delays from putative gains from mechanical stability reduction in the measured reaction time.
We have restricted this initial work to investigating two candidate force couplings that we thought were likely to demonstrate changes in stability based on our earlier work with isometric finger force production studies (Tillman and Ambike 2018a, b), and on recent work demonstrating intermittency in the grip–load coupling (Grover et al. 2018, 2019). However, the digit forces in a prismatic grasp operate under additional constrains associated with object rotations and linear accelerations in three spatial directions. This leads to other couplings in the various forces and free moments exerted by the digits (Gorniak et al. 2009) that we have not considered. Furthermore, we have explored preparation to one type of transition: from vertical oscillation to non-vertical oscillation. It is plausible that other types of transitions (horizontal to non-horizontal or translational oscillations to rotational oscillations, etc.) will also alter the stability of various couplings.
Finally, our study may be underpowered, since a significant effect of task type on the grip–load entropy was present but no pair-wise comparison among the tasks was significantly different. These issues remain the focus of our future work.
Conclusion
In conclusion, the stability-reduction aspect of the stability–maneuverability tradeoff occurs in human prehension; the strength of the coupling between the opposing normal forces exerted by the thumb and the virtual finger during the vertical oscillation of an object weakened when a change in the oscillation direction is expected. However, this effect may not be evident in other kinetic variables involved in prehension. In particular, the strength of the grip-force–load-force coupling did not reduce when a change in oscillation direction was expected, suggesting that this coupling may be robust to anticipated changes in manipulation patterns. Alternatively, high inertial loads and safety concerns regarding object slippage may have prevented reduction in the strength of the grip–load coupling. Future work should quantify whether the stability reduction that we observed leads to improved maneuverability, and whether the stability reduction is graded according to the difficulty of the manipulation task.
References
Abarbanel H, Brown R, Sidorowich J, Tsimring L (1993) The analysis of observed chaotic data in physical systems. Rev Mod Phys 65:1331–1392. https://doi.org/10.1103/RevModPhys.65.1331
Acasio J, Wu M, Fey NP, Gordon KE (2017) Stability–maneuverability trade-offs during lateral steps. Gait Posture 52:171–177. https://doi.org/10.1016/j.gaitpost.2016.11.034
Ambike S, Zhou T, Zatsiorsky VM, Latash ML (2015) Moving a hand-held object: reconstruction of referent coordinate and apparent stiffness trajectories. Neuroscience 298:336–356. https://doi.org/10.1016/j.neuroscience.2015.04.023
Arbib MA, Iberall T, Lyons D (1985) Coordinated control programs for movements of the hand. Exp Brain Res Suppl 10:111–129
Blank R, Breitenbach A, Nitschke M, Heizer W, Letzgus S, Hermsdorfer J (2001) Human development of grip force modulation relating to cyclic movement-induced inertial loads. Exp Brain Res 138:193–199. https://doi.org/10.1007/s002210000622
Dakin R, Segre PS, Straw AD, Altshuler DL (2018) Morphology, muscle capacity, skill, and maneuvering ability in hummingbirds. Science 359:653–657. https://doi.org/10.1126/science.aao7104
Danion F (2004) How dependent are grip force and arm actions during holding an object? Exp Brain Res 158:109–119. https://doi.org/10.1007/s00221-004-1882-5
Fish FE (2002) Balancing requirements for stability and maneuverability in cetaceans. Integr Comp Biol 42:85–93. https://doi.org/10.1093/icb/42.1.85
Flanagan JR, Tresilian J, Wing AM (1993) Coupling of grip force and load force during arm movements with grasped objects. Neurosci Lett 152:53–56. https://doi.org/10.1016/0304-3940(93)90481-y
Flanagan JR, Tresilian JR (1994) Grip–load force coupling: a general control strategy for transporting objects. J Exp Psychol Hum Percept Perform 20:944–957. https://doi.org/10.1037/0096-1523.20.5.944
Flanagan JR, Wing AM (1993) Modulation of grip force with load force during point-to-point arm movements. Exp Brain Res 95:131–143
Flanagan JR, Wing AM (1995) The stability of precision grip forces during cyclic arm movements with a hand-held load. Exp Brain Res 105:455–464. https://doi.org/10.1007/bf00233045
Flanagan JR, Wing AM (1997) The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. J Neurosci 17:1519–1528
Fu Q, Zhang W, Santello M (2010) Anticipatory planning and control of grasp positions and forces for dexterous two-digit manipulation. J Neurosci 30:9117–9126. https://doi.org/10.1523/JNEUROSCI.4159-09.2010
Gao F, Latash ML, Zatsiorsky VM (2005) Internal forces during object manipulation. Exp Brain Res 165:69–83. https://doi.org/10.1007/s00221-005-2282-1
Gordon AM, Westling G, Cole KJ, Johansson RS (1993) Memory representations underlying motor commands used during manipulation of common and novel objects. J Neurophysiol 69:1789–1796. https://doi.org/10.1152/jn.1993.69.6.1789
Gorniak SL, Zatsiorsky VM, Latash ML (2009) Hierarchical control of static prehension: II. Multi-digit synergies. Exp Brain Res 194:1–15. https://doi.org/10.1007/s00221-008-1663-7
Grover F, Lamb M, Bonnette S, Silva PL, Lorenz T, Riley MA (2018) Intermittent coupling between grip force and load force during oscillations of a hand-held object. Exp Brain Res 236:2531–2544. https://doi.org/10.1007/s00221-018-5315-2
Grover FM, Nalepka P, Silva PL, Lorenz T, Riley MA (2019) Variable and intermittent grip force control in response to differing load force dynamics. Exp Brain Res 237:687–703. https://doi.org/10.1007/s00221-018-5451-8
Hadjiosif AM, Smith MA (2015) Flexible control of safety margins for action based on environmental variability. J Neurosci 35:9106–9121. https://doi.org/10.1523/JNEUROSCI.1883-14.2015
Hasan Z (2005) The human motor control system's response to mechanical perturbation: should it, can it, and does it ensure stability? J Mot Behav 37:484–493. https://doi.org/10.3200/JMBR.37.6.484-493
Hasson CJ, Van Emmerik RE, Caldwell GE, Haddad JM, Gagnon JL, Hamill J (2008) Influence of embedding parameters and noise in center of pressure recurrence quantification analysis. Gait Posture 27:416–422. https://doi.org/10.1016/j.gaitpost.2007.05.010
Hermsdorfer J, Blankenfeld H (2008) Grip force control of predictable external loads. Exp Brain Res 185:719–728. https://doi.org/10.1007/s00221-007-1195-6
Hick WE (1952) On the rate of gain of information. Q J Exp Psychol 4:11–26
Huang HJ, Ahmed AA (2011) Tradeoff between stability and maneuverability during whole-body movements. PLoS ONE. https://doi.org/10.1371/journal.pone.0021815
Hyman R (1953) Stimulus information as a determinant of reaction time. J Exp Psychol 45:188–196
Johansson RS, Flanagan JR (2009) Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat Rev Neurosci 10:345–359. https://doi.org/10.1038/nrn2621
Johansson RS, Westling G (1984) Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp Brain Res 56:550–564
Kantz H, Schreiber T (1997) Nonlinear time series analysis. Cambridge University Press, Cambridge
Kerr J, Roth B (1986) Analysis of multifingered hands. Int J Robot Res 4:3–17. https://doi.org/10.1177/027836498600400401
Kording KP, Wolpert DM (2004) Bayesian integration in sensorimotor learning. Nature 427:244–247. https://doi.org/10.1038/nature02169
Kuling IA, Salmen F, Lefevre P (2019) Grip force preparation for collisions. Exp Brain Res 237:2585–2594. https://doi.org/10.1007/s00221-019-05606-y
Mandelbrot BB (1982) The fractal geometry of nature. Freeman, San Fransisco
Marwan N (2011) How to avoid potential pitfalls in recurrence plot based data analysis. Int J Bifurc Chaos 21:1003–1017. https://doi.org/10.1142/s0218127411029008
Marwan N, Kurths J (2002) Nonlinear analysis of bivariate data with cross recurrence plots. Phys Lett A 302:299–307. https://doi.org/10.1016/S0375-9601(02)01170-2
Nashed JY, Diamond JS, Gallivan JP, Wolpert DM, Flanagan JR (2017) Grip force when reaching with target uncertainty provides evidence for motor optimization over averaging. Sci Rep 7:11703. https://doi.org/10.1038/s41598-017-10996-6
Olafsdottir H, Yoshida N, Zatsiorsky VM, Latash ML (2005) Anticipatory covariation of finger forces during self-paced and reaction time force production. Neurosci Lett 381:92–96. https://doi.org/10.1016/j.neulet.2005.02.003
Olafsdottir H, Zhang W, Zatsiorsky VM, Latash ML (2007) Age-related changes in multifinger synergies in accurate moment of force production tasks. J Appl Physiol 102:1490–1501. https://doi.org/10.1152/japplphysiol.00966.2006
Olafsdottir HB, Kim SW, Zatsiorsky VM, Latash ML (2008) Anticipatory synergy adjustments in preparation to self-triggered perturbations in elderly individuals. J Appl Biomech 24:175–179
Pilon JF, De Serres SJ, Feldman AG (2007) Threshold position control of arm movement with anticipatory increase in grip force. Exp Brain Res 181:49–67. https://doi.org/10.1007/s00221-007-0901-8
Quaney BM, Rotella DL, Peterson C, Cole KJ (2003) Sensorimotor memory for fingertip forces: evidence for a task-independent motor memory. J Neurosci 23:1981–1986
Riccio GE (1993) Information in movement variability about quantitative dynamics of posture and orientation. In: Newell KMCD (ed) Variability and motor control. Human Kinetics, Champaign, pp 317–357
Riccio GE, Stoffregen TA (1988) Affordances as constraints on the control of stance. Hum Mov Sci 7:265–300
Riley MA, Turvey MT (2002) Variability of determinism in motor behavior. J Mot Behav 34:99–125. https://doi.org/10.1080/00222890209601934
Santisteban L, Teremetz M, Bleton JP, Baron JC, Maier MA, Lindberg PG (2016) Upper limb outcome measures used in stroke rehabilitation studies: a systematic literature review. PLoS ONE 11:e0154792. https://doi.org/10.1371/journal.pone.0154792
Scholz JP, Latash ML (1998) A study of a bimanual synergy associated with holding an object. Hum Mov Sci 17:753–779
Shim JK, Olafsdottir H, Zatsiorsky VM, Latash ML (2005) The emergence and disappearance of multi-digit synergies during force-production tasks. Exp Brain Res 164:260–270. https://doi.org/10.1007/s00221-005-2248-3
Shim JK, Park J, Zatsiorsky VM, Latash ML (2006) Adjustments of prehension synergies in response to self-triggered and experimenter-triggered load and torque perturbations. Exp Brain Res 175:641–653. https://doi.org/10.1007/s00221-006-0583-7
Slota GP, Latash ML, Zatsiorsky VM (2011) Grip forces during object manipulation: experiment, mathematical model, and validation. Exp Brain Res 213:125–139. https://doi.org/10.1007/s00221-011-2784-y
Tillman M, Ambike S (2018a) Cue-induced changes in the stability of finger force-production tasks revealed by the uncontrolled manifold analysis. J Neurophysiol 119:21–32. https://doi.org/10.1152/jn.00519.2017
Tillman M, Ambike S (2018b) Expectation of movement generates contrasting changes in multifinger synergies in young and older adults. Exp Brain Res 236:2765–2780. https://doi.org/10.1007/s00221-018-5333-0
Viviani P, Lacquaniti F (2015) Grip forces during fast point-to-point and continuous hand movements. Exp Brain Res 233:3201–3220. https://doi.org/10.1007/s00221-015-4388-4
Webber CL Jr, Zbilut JP (1994) Dynamical assessment of physiological systems and states using recurrence plot strategies. J Appl Physiol 1985 76:965–973. https://doi.org/10.1152/jappl.1994.76.2.965
Wolpert DM, Landy MS (2012) Motor control is decision-making. Curr Opin Neurobiol 22:996–1003. https://doi.org/10.1016/j.conb.2012.05.003
Yoshikawa T, Nagai K (1991) Manipulation and grasping forces in manipulation by multifingered robot hands. IEEE Trans Robot Autom 7:67–77. https://doi.org/10.1109/70.68071
Zbilut JP, Thomasson N, Webber CL (2002) Recurrence quantification analysis as a tool for nonlinear exploration of nonstationary cardiac signals. Med Eng Phys 24:53–60
Zhou T, Wu YH, Bartsch A, Cuadra C, Zatsiorsky VM, Latash ML (2013) Anticipatory synergy adjustments: preparing a quick action in an unknown direction. Exp Brain Res 226:565–573. https://doi.org/10.1007/s00221-013-3469-5
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Francesco Lacquaniti.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Naik, A., Ambike, S. The coordination between digit forces is altered by anticipated changes in prehensile movement patterns. Exp Brain Res 238, 1145–1156 (2020). https://doi.org/10.1007/s00221-020-05783-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-020-05783-1