
Abstract
Both intrapersonal and interpersonal coordination dynamics have traditionally been investigated using relative phase patterns of in-phase (ϕ = 0°) and/or anti-phase (ϕ = 180°). Numerous investigations have demonstrated that coordination tasks that require other relative phase patterns (e.g., 90°) are difficult or near impossible to perform without extended practice. Recent findings, however, have demonstrated that an individual can produce a wide range of intrapersonal bimanual patterns within a few minutes of practice when provided integrated feedback. The present experiment was designed to directly compare intra- and interpersonal coordination performance and variability when provided Lissajous feedback or pacing metronome. Single participants (N = 12) and pairs of participants (N = 24, 12 pairs) were required to produce relative phase patterns between 0° and 180° in 30° increments using either pacing metronomes or Lissajous displays. The Lissajous displays involved a goal template and a cursor providing integrated feedback regarding the position of the two effectors. The results indicated both single and pairs of participants could effectively produce a large range of coordination patterns that typically act as repellers after only 6 min of practice when provided integrated feedback. However, single participants performed the in-phase coordination pattern more accurately and with less variability than paired participants, regardless of the feedback condition. These results suggest an advantage for intrapersonal coordination when performing in-phase coordination, possibly due to the stabilizing effect occurring via the neuro-muscular linkage between effectors.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Daily activities often require individuals to coordinate actions individually (e.g., driving a car) or with another person (e.g., dancing with a partner). Coordinated actions produced by an individual are referred to as intrapersonal (bimanual) coordination, while coordinated actions produced by two or more individuals are referred to as interpersonal (social) coordination. A large body of research has focused on how intrapersonal patterns of coordination emerge, stabilize, and transition (see Kelso 1995; Oullier et al. 2008; Swinnen 2002; Swinnen and Wenderoth 2004 for reviews). The general results have indicated only two inherently stable coordination patterns, in-phase (ϕ = 0°) and anti-phase (ϕ = 180°), with in-phase more stable than anti-phase. Other phase relationships (e.g., 30°, 90°) have proved difficult or near impossible to perform without extended practice (Fontaine et al. 1997; Lee et al. 1995; Swinnen et al. 1997a, b). The Haken–Kelso–Bunz (HKB) model provides a formal account of these stability properties based on nonlinear dynamics (Haken et al. 1985). In-phase and anti-phase coordination patterns are modeled as stable fixed-point attractors, while other relative phase patterns represent repellers in the attractor landscape. A repellar drives a variable away from it and towards the attractor (e.g., in-phase coordination pattern). As such, spontaneous phase transitions to in-phase coordination patterns may occur when the control parameter (e.g., frequency) is increased (e.g., Kelso 1984, 1994; Peper et al. 1995; Treffner and Turvey 1993). Research has indicated interpersonal coordination is constrained by the same dynamical entrainment process as intrapersonal coordination (see Schmidt et al. 2011 for a review).
The stability of the in-phase pattern has been demonstrated in a number of intrapersonal (e.g., circle drawing (e.g., Semjen et al. 1995; Summers et al. 2008), elbow flexion–extension (e.g., Kovacs et al. 2009a, b), finger flexion–extension (e.g., Riek et al. 1992; Scholz and Kelso 1989), forearm pronation–supination (e.g., Carson et al. 1996; Temprado et al. 1999)) and interpersonal (e.g., leg swinging (Schmidt et al. 1990), pendulum (Schmidt and O’Brien 1997), rocking chair (Richardson et al. 2007), shoe tying (Gorman and Crites 2015)) coordination tasks. The difficulties associated with producing patterns such as 30° and 90° relative phase have typically been attributed to strong phase attraction to inherently stable coordination modes (i.e., in-phase and anti-phase) (Schöner and Kelso 1988). However, evidence also suggest that the difficulty may be due, in large part, to perceptual and attentional factors (see Shea et al. 2016 for a review).
Kovacs et al. (2009a) examined the influence of perceptual and attentional factors on the intrapersonal coordination landscape by comparing scanning trials paced by visual metronomes with a condition where integrated perceptual information was provided. Note, auditory and visual metronomes are quite common in studies examining intrapersonal and interpersonal coordination. For example, Zanone and Kelso (1992) used visual metronomes to pace movement of the right and left limb during scanning trials where the required relative phase pattern was systematically changed. Schmidt et al. (1990) used an auditory metronome to pace a task where participants were required to coordinate their leg swing with another participant in both an in-phase and anti-phase patterns. However, recent research has indicated that the use of auditory and visual metronomes as well as other types of environment information may negatively influence the performance of coordination tasks (e.g., Kovacs et al. 2010a, b). Indeed, the results for the metronome condition (Kovacs et al. 2009a) were consistent with previous research (e.g. Zanone and Kelso 1992; Yamanishi et al. 1980) demonstrating relative phase errors and variability at 0° smaller than that at 180° and significantly larger errors and variability at all other relative phase relationships. In the integrated feedback condition, the perceptual information was presented in the form of Lissajous feedback and movement template.
Lissajous information integrates the position of the two limbs into a single point (cursor) in one plane with, for example, the left limb moving the cursor up (extension) and down (flexion) and the right limb moving it left (flexion) and right (extension). The template provided was a two-dimensional figure which if tracked by the cursor produces the goal coordination pattern. In general, Lissajous information has been shown to greatly enhance intrapersonal coordination patterns with complex phase relationships (e.g., Kennedy et al. 2016c; Kovacs et al. 2009a, b). In addition, participants have tuned in multi-frequency (e.g., 1:2; 2:1: 2:3) circling (Boyles et al. 2012), force (Kennedy et al. 2015, 2017), and reciprocal movement (Kovacs et al. 2010a, b) tasks within a few minutes of practice when provided Lissajous feedback. Note, however, that Lissajous feedback and templates have not been tested in experimental designs requiring interpersonal coordination.
When Kovacs et al. (2009a) provided Lissajous feedback and template to guide performance, relative phase errors and variability were significantly smaller than that found for the metronome condition at all goal relative phases except 0°. Surprisingly, no differences were detected between 30° and 180° relative phase conditions with relative phase errors and variability ≈ 10°. For the in-phase pattern, errors and variability were exceptionally low (≈ 5°). However, it is possible that the lower values of error and variability during the in-phase coordination pattern compared with all the other patterns were due to a stabilizing effect occurring via the neuro-muscular linkage (e.g. neural crosstalk) and/or to a destabilizing effect for all the other phase relations (Cardoso de Oliveira 2002; Kagerer et al. 2003: Marteniuk et al. 1984) rather than factors associated with the feedback (Lissajous) provided. As such, assessing coordination performance and stability under the same conditions (metronome/Lissajous) while removing the neuro-muscular linkage between the component oscillators (limbs) (i.e., interpersonal coordination) may provide additional insights relative to perceptual/attentional and neuro-muscular constraints on coordination dynamics.
Research investigating coordination dynamics (e.g., Kelso 1984, 1994; Peper et al. 1995; Treffner and Turvey 1993) and research directly comparing intrapersonal and interpersonal coordination (e.g., Meerhoff and De Poel 2014, Oullier et al. 2008, Peper et al. 2013; Richardson et al. 2007, Schmidt et al. 1990) have typically used in-phase and anti-phase tasks. Most likely because 0° and 180° relative phase are inherently easy and stable to perform (Yamanishi et al. 1980) while other relative phase patterns have proved difficult (Byblow and Goodman 1994; Swinnen et al. 1997; Zanone and Kelso 1992). Given the recent success of feedback manipulations in facilitating complex intrapersonal coordination (e.g., Kovacs et al. 2010a, b; Wang et al. 2013), however, it may be possible to investigate interpersonal coordination dynamics using more challenging relative phase coordination patterns. Therefore, the current experiment was designed to compare the coordination dynamics between intra- and interpersonal coordination on scanning trials (0°–180°, 30° increments) when provided Lissajous feedback and template to guide performance or pacing metronomes. Understanding factors that may facilitate or interfere with the ability of one or more individuals to coordinate movement is not only important for theoretical purposes but may also have practical implications (e.g., drones, surgery, teleoperations, video games).
Method
Participants
Right-handed undergraduate students (N = 36) volunteered to participate in the experiment. The Institutional Review Board at Texas A&M University approved the procedures, and participants provided written informed consent before participation in the study. None of the participants were active musician or had significant musical training. Participants were randomly assigned to a metronome or Lissajous condition prior to entering the testing room.
Apparatus
The apparatus consisted of two horizontal levers. The levers were affixed at the proximal ends to near frictionless vertical axles. The axles allowed the levers to move in the horizontal plane over the surface of a table. A handle was attached close to the distal end of each lever. The position of the handle was adjustable. The handles were adjusted to allow participants to comfortably grasp each handle with their palms in a vertical position with their forearms resting on the lever and their elbows aligned over the axis or rotation. The horizontal movement of the levers was monitored at 200 Hz by potentiometers attached to the lower ends of the axles. A projector was used to display the visual metronomes or Lissajous information, depending on condition. In the metronome condition, two squares were displayed on the screen. The left (blue) and right (red) squares flashed on and off with the required phase relationship for that trial. In the Lissajous condition, a movement template for goal relative phase pattern and on-line feedback regarding the position of the two limbs as a single point (cursor) was provided on a screen directly in front of the participant. Motion of the left lever moved the cursor up (extension) and down (flexion) while the motion of the right lever resulted in moving the cursor left (flexion) and right (extension). The cursor and Lissajous template were generated with customized software.
Procedure
Participants were recruited individually or in pairs. Upon entering the testing room, participants recruited individually were randomly assigned to either the intrapersonal Lissajous (N = 6) or the intrapersonal (N = 6) metronome condition. Similarly, pairs of participants were randomly assigned to the interpersonal Lissajous (N = 12, 6 pairs) or metronome (N = 12, 6 pairs) condition, and also individuals within a pair were randomly assigned to manipulate either the right lever or the left lever.
All participants sat at a table with their forearm(s) (right, left, or both depending on the assignment) resting on the lever(s) that limited elbow motion to flexion–extension in the horizontal plane. Participants were seated on a height adjustable chair with the horizontal eye line corresponding with the midway point of the display projected onto the screen in front of them (see Fig. 1). Participants were informed that they were to attempt to move their limb (left for the left lever and right for the right lever) back and forth (approximately 30°) to produce the desired phase relationship. It was emphasized that the movements of both limbs should be continuous. Participants in the metronome condition were asked to attempt to reverse (extension to flexion) their limb movement upon the onset of the corresponding light square. When the left (blue) square was illuminated, the participant was required to reverse the left limb; when the right (red) square was illuminated, the participant was required to reverse the right limb. During the scanning trials, the squares blinked on and off according to the goal phase relationship. This type of metronome was used by Kovacs et al. (2009a) in their experiments using scanning trials. Participants in the Lissajous condition were told to follow the general path of the template with the cursor. After any trial in which the average frequency was below 1.0 Hz, the experimenter encouraged the participant to increase the speed at which they produced the relative phase pattern. Similar to Kovacs et al. (2009a), participants were required to perform three practice scanning blocks and one test block. A scanning block required participants to produce each relative phase pattern in an ascending and descending order (0°, 30°, 60°, 90°, 120°, 150°, 180°, 180°, 150°, 120°, 90°, 60°, 30°, 0°) for a total of 14 trials per block (see Fig. 1a). Each trial was 30 s. Participants received 4 min rest interval between each scanning block and 10 min rest prior to the test block.

Illustration of the goal relative phase patterns (a) for the 0° (top) to 180° (bottom) in 30° increments and resulting Lissajous plots. Top view of the experimental set for the one person (b) and two person (c) conditions
Measures and data reduction
Data reduction was performed using MATLAB. The potentiometer signals representing the displacement of the limb were low-pass filtered with a second-order dual pass Butterworth with a cutoff frequency of 10 Hz.
Measures of coordination
The continuous relative phase (ϕ) between the two limbs was computed to examine the spatial–temporal coordination of the limbs’ motion. Prior to computation of the continuous relative phase, displacement and velocity data for each limb were normalized in two steps. First, the mean of each data series was subtracted from each data point in the series to mean center the time series around zero. Second, amplitude rescaling was done by dividing the positive and negative amplitudes with the maximum positive or negative amplitude value. The phase angle (θi) for each limb (i = r, l) was computed for each sample of the displacement time series using the following formula adapted from Kelso et al. (1986):
with Xi representing normalized limb position and dXi/dt normalized instantaneous velocity. Next, the continuous relative phase was computed by subtracting the phase angle of the left limb (θl) from the phase angle of the right limb (θr), ϕ = θr − θl. Absolute error (AE) of the continuous relative phase was used as a measure of the degree to which the required goal relative phase (ϕ = 0°, 30°, 60°, 90°, 120°, 150°, 180°) was achieved. Variable error (VE) and constant error (CE) of relative phase were used as measures of stability and bias of the performed coordination pattern.
Results
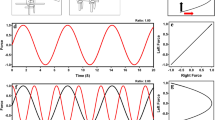
Figure 2 provides performance examples of the goal relative phase patterns (0°–180° in 30° increments) during the test block for participants in the single metronome (A), pair metronome (B), single Lissajous (C), and pair Lissajous (D) conditions.

Examples of performance for goal relative phase patterns (0°–180° in 30° increments) for participants in the individual (a, c) and pair (b, d) metronome (top) and Lissajous (bottom) conditions, respectively
Absolute (AE), variable (VE), and constant (CE) errors of the performed relative phase were analyzed in a 2 Group (Individual, Pair) × 2 Conditions (Lissajous, Metronome) × 7 Goal Phase (ϕ = 0°, 30°, 60°, 90°, 120°, 150°, 180°) ANOVAs with repeated measures on goal phase. Duncan’s new multiple range test and simple main effect post hoc tests were performed when appropriate (α = 0.05). Additionally, apriori comparisons were planned between groups on the relative phase error (AE) and variability (VE) measures during the in-phase and anti-phase coordination.
Coordination performance
AE relative phase
The analysis of relative phase AE (Fig. 3) failed to detect a main effect of group, F(1,20) < 1, p > 0.05. In addition, the Group × condition, F(1,20) < 1, p > 0.05, Group × Goal phase, F(6,120) = 1.22, p > 0.05, or a Group × ondition × Goal phase F(6,120) = 1.00, p > 0.05, interactions failed significance indicating similar patterns of response for the individual and paired participants. However, we acknowledge the low statistical power due to the number of participants in each condition. The analysis detected a main effect of Condition, F(1,20) = 100.43, p < 0.01, with the participants in the Lissajous condition making smaller relative phase errors compared with participants in the metronome condition. The main effect of Goal Phase, F(6,120) = 6.82, p < 0.01, as well as a Condition x Goal Phase, F(6,120) = 5.64, p < 0.01, interactions were also significant. Simple main effect analysis failed to detect a difference in relative phase errors (AE) between the Lissajous and metronome conditions when performing 0° goal phase. All other phase relations were performed with significantly less error by participants in the Lissajous condition compared with participants in the metronome condition. Additionally, no differences were detected between the coordination patterns for the various goal phases performed by participants in the Lissajous condition, but differences were detected in the metronome condition. Participants in the metronome condition performed the in-phase (0°) and anti-phase (180°) coordination pattern with significantly less relative phase error compared with all the other phase relation with the in-phase pattern produced more accurately than the anti-phase pattern. The other phase relations (30°–150°) were not different from one another.

Absolute error (AE) in continuous relative phase (top), and variable error (VE) in continuous relative phase (bottom) for participants in the Lissajous and metronome groups
The apriori contrasts for in-phase and anti-phase performance indicated that participants in both individual groups performed the in-phase goal phase more accurately than participants in both pair groups. On the anti-phase goal phase, the individual and pair groups when provided Lissajous feedback performed more accurately than the individual group provided metronome feedback. The pair group provided metronome feedback produced larger relative phase errors than all other groups on the anti-phase goal phase.
VE relative phase
The analysis of relative phase VE (Fig. 3) detected a main effect of Group, F(1,20) = 16.05, p < 0.01, a main effect of Condition, F(1,20) = 29.36, p < 0.01, as well as a significant Group x Condition, F(1,20) = 7.00, p < 0.05, interaction. Simple main effect analysis indicated significantly more stable relative phase performance under the Lissajous condition compared to the metronome condition, for both the individual group as well as the paired group. Additionally, no differences were found between the individual group compared to the paired group when Lissajous feedback was available. Under the metronome condition, performance of the individual group was significantly more stable compared with the performance of the paired group.
The analysis of VE also detected a main effect of Goal Phase, F(6, 120) = 10.67, p < 0.01, as well as a significant Condition x Goal Phase, F(6, 120) = 3.57, p < 0.01, interaction. Simple main effect analysis failed to detect differences in relative phase stability (VE) between the Lissajous and metronome condition when performing the in-phase coordination pattern. Performance was significantly more stable on all the other goal phase relations for participants in the Lissajous condition compared with participants in the metronome condition. Additionally, the performance of the participants in the Lissajous condition was more stable during the in-phase coordination compared with all the other phase relations, which in turn were not different from one another. Similarly, performance of participants in the metronome condition was less variable during the in-phase coordination compared with all the other required phase relations. Additionally, relative phase variability at the 30° goal phase was also less variable compared with the other phase relations (60°, 90°, 120°, 150°, 180°), which were not different from one another.
The apriori contrast for relative phase VE indicated that participants in the individual groups provided Lissajous and metronome feedback performed the in-phase relative phase coordination pattern with less variability than the pair groups under the Lissajous or metronome feedback condition. The pair group provided metronome feedback was more variable than all other groups. On the anti-phase goal phase the individual and pair groups when provided Lissajous feedback performed with smaller relative phase VE than the individual group provided metronome feedback. Relative phase variability for individual group provided metronome feedback on the anti-phase goal was larger than relative phase variability for individual group provided Lissajous feedback, but not different from the pair group provided Lissajous feedback.
CE relative phase
The analysis of relative phase CE detected main effects of condition, F(1,20) = 4.42, p < 0.05 and goal phase, F(6,120) = 3.26, p < 0.05. Higher CE values were found in the metronome than in the Lissajous condition. Duncan’s new multiple range test on goal phase indicated higher CE values (positive) for 30°, 60° and 120° relative phase patterns than the CE values (negative) for the 150° and 180° relative phase patterns. All other main effects and interactions were not significant.
Discussion
The results of the present experiment indicated that both individual participants (intrapersonal) and pairs of participants (interpersonal) could effectively produce a large range of coordination patterns after only 6 min of practice when provided Lissajous feedback and template (see Fig. 4). However, single participants performed the in-phase coordination pattern more accurately and with less variability than paired participants, regardless of the feedback condition. Overall, these results suggest that both inherent (e.g., neural crosstalk) and incidental (perceptual/attentional factors) constraints influence coordination dynamics.

Absolute error (AE) in continuous relative phase, and variable error (VE) in continuous relative phase for participants in the individual group, and the paired group under the Lissajous condition
Role of neural crosstalk in the coordination dynamics
Although intra- and interpersonal coordination show many similarities in terms of their coordination dynamics (Schmidt et al. 2011), it is important to note that they are fundamentally different, given the neuro-muscular linkage between effectors in the intrapersonal coordination tasks. Of particular, interest from this perspective is neural crosstalk. Neural crosstalk is a mirror image command sent to the homologous muscles of the contralateral limb (Cattaert et al. 1999; Swinnen 2002). It is an often invoked concept to account for the stability differences, phase transition, and difficulties in producing simple (e.g., in-phase, anti-phase) and complex (e.g., 30° relative phase, 1:2 multi-frequency) intrapersonal coordination patterns (e.g., Aramaki et al. 2010, Buchanan and Ryu 2012, Cattaert et al. 1999; Kasuga and Nozaki 2011; Maki et al. 2008; Spijkers and Heuer 1995; Steglich et al. 1999; Swinnen 2002; Swinnen and Wenderoth 2004) and has been demonstrated in both kinematic (e.g., Kasuga and Nozaki 2011, Kennedy et al. 2015, 2016b, Park et al. 2013; Spijkers and Heuer 1995) and neuroimaging (e.g., Aramaki et al. 2006, 2010, Houweling et al. 2010; Maki et al. 2008) research. For interpersonal coordination, the interacting components (i.e. two limbs) do not share a common neural mechanism. Note, however, that a recent investigation examined the role of mechanical linkages between two individuals on the stability on in-phase and anti-phase coordination (Cuijpers et al. 2019).
According to the neural crosstalk model, two independent motor plans exist for each limb and some fraction of the force command for one limb is transmitted to the contralateral limb (Cattaert et al. 1999). Because neural crosstalk conveys the same information to both limbs, it is believed that in-phase coordination patterns using homologous muscles are facilitated when the contralateral and ipsilateral signals are integrated (Cardoso de Oliveira 2002; Kagerer et al. 2003; Marteniuk et al. 1984). The results of the current investigation support such a possibility. Single participants performed the in-phase coordination pattern more accurately and with less variability than paired participants, regardless of the condition (metronome vs. Lissajous). It is possible that the lower values of error and variability during the in-phase coordination pattern compared with all the other patterns may be due to a stabilizing effect occurring via the neuro-muscular linkage (e.g. neural crosstalk). If so, would indicate the coupling and stability characteristics associated with intrapersonal coordination reside in the forward commands and the interactions that arise from those commands as the result of shared neural pathways (Ridderikhoff et al. 2005). Not only are the results of the current investigation consistent with the notion that neural crosstalk can facilitate in-phase coordination, but also suggests there is an advantage for intrapersonal over interpersonal coordination when performing in-phase coordination patterns. Interestingly, Cardoso de Oliveira (2002) has shown that during in-phase coordination, the correlated activity between interhemispheric motor cortical areas (the motor areas activated simultaneously in both hemispheres) is much stronger than during anti-phase coordination. This correlated activity between hemispheres could provides the neural basis of crosstalk between limbs (Swinnen 2002).
When performing relative phase patterns other than 0°, the commands to each limb are often in conflict (Summers et al. 1993). Performance of a 90° relative phase pattern, for example, may suffer from ongoing interference believed to result from the conflicting information or intermingling of the signals controlling the two effectors (e.g., Cardoso de Oliveira 2002; Kagerer et al. 2003: Maki et al. 2008: Marteniuk et al. 1984). Indeed, performance of relative phase patterns between 30° and 150° with metronomes in the current investigation was quite difficult, as indicated by the high error and variability. When different activation patterns are required for the two effectors (e.g., performing 90° relative phase bimanual pattern), an individual must inhibit or compensate for the crosstalk that is transmitted to the contralateral limb (Barral et al. 2006, 2010). If the inhibition or compensation for the crosstalk fails, the interference may challenge the stability of the coordination dynamics likely resulting in unwanted perturbations to the coordinated action or may even prompt a phase transition to a more stable coordination pattern (Houweling et al. 2010). Perturbations consistent with neural crosstalk were observed in a series of experiments examining the performance of a 1:2 bimanual force tasks (Kennedy et al. 2015, 2016a, b). More, specifically, perturbations were observed in the force and force–velocity profiles of the non-dominant limb that could be attributed to the production of force by the dominant limb. Note that Kennedy and colleagues provided Lissajous feedback to guide performance similar to the current investigation. They suggested that the Lissajous information provided the system the opportunity to override neural crosstalk, but it could not completely eliminate its effect (perturbations) on the coordination dynamics (see Shea et al. 2016 for a review). Although similar perturbations were not observed in the displacement trace (see Fig. 2) in the current investigation, this result is consistent with the notion that the effect of neural crosstalk is partially dependent on force, with higher forces resulting in stronger crosstalk effects and lower forces in weaker ones (Heuer et al. 2001). Perhaps, if the current investigation required participants to coordinate relative phase patterns using higher levels of force, perturbations consistent with neural crosstalk would be observed.
Role of perceptual information on coordination dynamics
The results of the current investigation indicated that both single and pairs of participants could effectively produce a large range of coordination patterns that typically act as repellers (from ϕ = 30° to 150°) when provided Lissajous feedback and template (see Fig. 4). However, the same patterns could not be performed well (high error and variability) when participants were provided metronomes (see Fig. 3). This result points to incidental (e.g., perceptual, attentional) constraints in the testing environment rather than interference associated with neural crosstalk for the difficulty in producing complex relative phase coordination patterns. In an experiment to determine whether the constraints associated with bimanual tasks arise from the structure of the neuro-muscular system or from the specific features of the task or environment, Mechsner et al. (2001) manipulated hand positions to create visually or anatomic in-phase and anti-phase coordination patterns. The results indicated that visual in-phase coordination was more stable than visual anti-phase, regardless of the anatomical arrangement (i.e., homologous vs. non-homologous muscles) used to perform the task. As such, it was concluded that constraints associated with the stability of in-phase pattern were due to perceptual constraints. Similarly, Bingham and colleagues (e.g., Bingham et al. 1999; Bingham 2004a, b; Wilson et al. 2005a, b) provided evidence that coordination can be constrained by perceptual factors associated with the task. More specifically, in a series of experiments, Bingham and colleagues demonstrated that a participant’s ability to produce stable relative phase patterns was dependent on the participant’s ability to perceive the relative phase pattern (Bingham et al. 1999; Bingham 2004a, b; Wilson et al. 2005a, b).
Based on this information, Shea and colleagues (Kennedy et al. 2016c; Kovacs et al. 2010a, b; Kovacs and Shea 2011) argued participants could coordinate complex relative phase patterns when information is provided that allows participants to perceive and thereby correct coordination errors (see Shea et al. 2016 for a review). Indeed, Kovacs and colleagues demonstrated a wide range of coordination patterns that were once thought difficult to perform without extensive practice could be quickly and effectively performed when Lissajous feedback was provided and attentional demands were reduced (Kovacs et al. 2010a, b). The Lissajous information likely facilitated the successful performance of complex coordination patterns, because the integrated information provided participants information necessary to detect errors in performance and provided an efficient way to correct those errors (e.g., Kennedy et al. 2016c; Kovacs et al. 2010a, b; Kovacs and Shea 2011). Similar results were also demonstrated with relative phase feedback (Boyles et al. 2012) and visual/auditory models (Kennedy et al. 2013; Panzer et al. 2018). Note, however, this type of feedback was only examined during intrapersonal coordination tasks. Remarkably, pairs of participants were able to rapidly tune-in complex coordination patterns with low error and variability when provided Lissajous feedback and template to guide performance similar to individual participants. These results provide additional evidence for the robust nature of Lissajous information in facilitating complex bimanual coordination patterns. The ability to perform complex interpersonal coordination tasks may have many practical applications. For example, an individual who has suffered an amputation or stroke may have to perform activities of daily living, typically performed bimanually, with the assistance of another individual (e.g., caretaker) or an adapted device (Lum et al. 1995). A surgeon may have to tie surgical knots with another surgeon or robot (Murphy 2001; Wang et al. 2008). As such, additional research is needed to explore the constraints that impact interpersonal coordination and understand differences between intra- and interpersonal coordination.
References
Aramaki Y, Honda R, Okada T, Sadato N (2006) Neural correlates of the spontaneous phase transition during bimanual coordination. Cereb Cortex 16:1338–1348
Aramaki Y, Osu R, Sadato N (2010) Resource-demanding versus cost-effective bimanual interaction in the brain. Exp Brain Res 203:407–418
Barral J, Debû B, Rival C (2006) Developmental changes in unimanual and bimanual aiming movements. Dev Neuropsychol 29:415–429
Barral J, De Pretto M, Debû B, Hauert CA (2010) Activation and inhibition of bimanual movements in school-aged children. Hum Physiol 36:47–57
Bingham GP (2004a) A perceptually driven dynamical model of bimanual rhythmic movement (and phase perception). Ecol Psychol 16:45–53
Bingham GP (2004b) Another timing variable composted of state variables: phase perception and phase driven oscillators. Advances in psychology: time to contact. Elsevier, Amsterdam
Bingham GP, Schmidt RC, Zaal FTJM (1999) Visual perception of relative phasing in human limb movements. Percept Psychophys 61:246–258
Boyles J, Panzer S, Shea CH (2012) Increasingly complex bimanual multi-frequency coordination patterns are equally easy to perform with on-line relative velocity feedback. Exp Brain Res 216:515–525
Buchanan JJ, Ryu YU (2012) Scaling movement amplitude: adaptation of timing and amplitude control in a bimanual task. J Motor Behav 44:135–147
Byblow WD, Goodman D (1994) Performance asymmetries in multifrequency coordination. Hum Mov Sci 13:147–174
Cardoso de Oliveira S (2002) The neuronal basis of bimanual coordination: recent neurophysiological evidence and functional models. Acta Psychol 110:139–159
Carson RG, Byblow WD, Abernethy B, Summer JJ (1996) The contribution of inherent and incidental constraints to intentional switching between patterns of bimanual coordination. Hum Mov Sci 15:55–589
Cattaert D, Semjen A, Summers JJ (1999) Simulating a neural cross-talk model for between-hand interference during bimanual circle drawing. Biol Cybern 81:343–358
Cuijpers LS, Den Hartigh RJR, Zaal FTJM, de Poel HJ (2019) Rowing toghether: interpersonal coordination dynamics with and without mechanical coupling. Hum Mov Sci 64:38–46
Fontaine RJ, Lee TD, Swinnen SP (1997) Learning a new bimanual coordination pattern: reciprocal influences of intrinsic and to-be-learned patterns. Can J Psychol 51:1–9
Gorman JC, Crites MJ (2015) Learning to tie well with others: bimanual versus intermanual performance of a highly practiced skill. Ergonomics 58:680–697
Haken H, Kelso JA, Bunz H (1985) A theoretical model of phase transitions in human hand movements. Biol Cybern 51:347–356
Heuer H, Kleinsorge T, Spijkers W, Steglich W (2001) Static and phasic cross-talk effects in discrete bimanual reversal movements. J Mot Behav 33:67–85
Houweling S, Beek PJ, Daffertshofer A (2010) Spectral changes of interhemispheric crosstalk during movement instabilities. Cereb Cortex 20:2605–2613
Kagerer FA, Summers JJ, Semjen A (2003) Instabilities during antiphase bimanual movements: are ipsilateral pathways involved? Exp Brain Res 151:489–500
Kasuga S, Nozaki D (2011) Cross talk in implicit assignment of error information during bimanual visuomotor learning. J Neurophys 106:1218–1226
Kelso JAS (1984) Phase-transitions and critical-behavior in human bimanual coordination. Am J Phys 246:1000–1004
Kelso JAS (1994) The informational character of self-organized coordination dynamics. Hum Mov Sci 13:393–413
Kelso JAS (1995) Dynamic patterns: the self-organization of the brain and behavior. MIT Press, Cambridge
Kelso JAS, Scholz JP, Schoner G (1986) Nonequilibrium phase-transitions in coordinated biological motion - Critical fluctuations. Phys Lett A 118:279–284
Kennedy DM, Wang C, Shea CH (2013) Reacting while moving: influence of right limb movement on left limb reaction. Exp Brain Res 230:143–152
Kennedy DM, Boyle JB, Rhee J, Shea CH (2015) Rhythmical bimanual force production: homologous versus non-homologous muscles. Exp Brain Res 233:181–195
Kennedy DM, Boyle JB, Wang C, Shea CH (2016a) Bimanual force control: cooperation and interference. Psychol Res 80:34–54
Kennedy DM, Rhee J, Shea CH (2016b) Symmetrical and asymmetrical influences on force production in 1:2 and 2:1 bimanual force coordination tasks. Exp Brain Res 234:287–300
Kennedy DM, Wang C, Panzer S, Shea CH (2016c) Continuous scanning transitioning through the attractor landscape. Neurosci Lett 610:66–72
Kennedy DM, Rhee J, Jimenez J, Shea CH (2017) The influence of asymmetric force requirements on a multi-frequency bimanual coordination task. Hum Mov Sci 51:125–137
Kovacs AJ, Shea CH (2011) The learning of 90 degrees continuous relative phase with and without Lissajous feedback: external and internally generated bimanual coordination. Acta Psychol 136:311–320
Kovacs AJ, Buchanan JJ, Shea CH (2009a) Bimanual 1:1 with 90° continuous relative phase: difficult or easy! Exp Brain Res 193:129–136
Kovacs AJ, Buchanan JJ, Shea CH (2009b) Using scanning trials to assess intrinsic coordination dynamics. Neurosci Lett 455:162–167
Kovacs AJ, Buchanan JJ, Shea CH (2010a) Impossible is nothing: 5:3 and 4:3 multi-frequency bimanual coordination. Exp Brain Res 201:249–259
Kovacs AJ, Buchanan JJ, Shea CH (2010b) Perceptual and attentional influences on continuous 2:1 and 3:2 multi-frequency bimanual coordination. J Exp Psychol Hum Percept Perform 36:936–954
Lee TD, Swinnen SP, Verschueren S (1995) Relative phase alterations during bimanual skill acquisition. J Mot Behav 27:263–274
Lum SP, Lehman SL, Reinkensmeyer DJ (1995) The bimanual lifting rehabilitator: an adaptive machine for therapy of stroke patients. IEEE T Bio Med Eng 3:166–174
Maki Y, Wong KFK, Sugiura M, Ozaki T, Sadato N (2008) Asymmetric control mechanisms of bimanual coordination: an application of directed connectivity analysis to kinematic and functional MRI data. Neuroimage 42:1295–1304
Marteniuk RG, Mackenzie CL, Baba DM (1984) Bimanual movement control—information- processing and interaction effects. Q J Exp Psychol 36:335–365
Mechsner F, Kerzel D, Knoblich G, Prinz W (2001) Perceptual basis of bimanual coordination. Nature 414:69–73
Meerhoff LRA, De Poel HJ (2014) Asymmetric interpersonal coupling in a cyclic sports- related movement task. Hum Mov Sci 35:66–79
Murphy DL (2001) Endoscopic suturing and knot tying: theory into practice. Ann Surg 234:607
Oullier O, de Guzman GC, Jantzen KJ, Lagarde J, Kelso JAS (2008) Social coordination dynamics: measuring human bonding. Soc Neurosci 3:178–192
Panzer S, Kennedy DM, Wang C, Shea CH (2018) The simplest acquisition protocol is sometimes the best protocol: preforming and learning a 1:2 bimanual coordination task. Exp Brain Res 236:539–550
Park S, Dijkstra TMH, Sternad D (2013) Learning to never forget—time scales and specificity of long-term memory of a motor skill. Front Comput Neurosci 7:1–13
Peper CE, Beek PJ, van Wieringen PC (1995) Frequency-induced phase transitions in bimanual tapping. Biol Cybern 73:301–309
Peper CLE, Stins JF, de Poel HJ (2013) Individual contributions to (re-)stabilizing interpersonal movement coordination. Neurosci Lett 557:143–147
Richardson MJ, Marsh KL, Isenhower RW, Goodman JRL, Schmidt RC (2007) Rocking together: dynamics of intentional and unintentional interpersonal coordination. Hum Move Sci 26:867–891
Ridderikhoff A, Peper CL, Beek PJ (2005) Unraveling interlimb interactions underlying bimanual coordination. J Neurophysiol 94:3112–3125
Riek S, Carson RG, Byblow WD (1992) Spatial and muscular dependencies in bimanual coordination. J Hum Mov Stud 23:251–265
Schmidt RC, O’Brien B (1997) Evaluating the dynamics of unintended interpersonal coordination. Ecol Psychol 9:189–206
Schmidt RC, Carello C, Turvey MT (1990) Phase transitions and critical fluctuations in the visual coordination of rhythmic movements between people. J Exp Psychol Hum Percept Perform 16:227–247
Schmidt RC, Fitzpatrick P, Carson R, Margeche J (2011) Understanding social motor coordination. Hum Move Sci 30:834–845
Scholz JP, Kelso JAS (1989) A quantitative approach to understanding the formation and change of coordinated movement patterns. J Motor Behav 21:122–144
Schöner G, Kelso JAS (1988) Dynamic pattern generation in behavioral and neural systems. Science 239:1513–1520
Semjen A, Summers JJ, Cattaert D (1995) Hand coordination in bimanual circle drawing. J Exp Psychol Hum Percept Perform 21:1139–1157
Shea CH, Buchanan JJ, Kennedy DM (2016) Perception and action influences on discrete and reciprocal bimanual coordination. Psychon Bull Rev 23:361–386
Spijkers W, Heuer H (1995) Structural constraints on the performance of symmetrical bimanual movements with different amplitudes. Q J Exp Psychol 48:716–740
Steglich C, Heuer H, Spijkers W, Kleinsorge T (1999) Bimanual coupling during the specification of isometric forces. Exp Brain Res 129:302–316
Summers JJ, Ford SK, Todd JA (1993) Practice effects on the coordination of the 2 hands in a bimanual tapping task. Hum Mov Sci 12:111–133
Summers JJ, Maeder S, Hiraga CY, Alexander JR (2008) Coordination dynamics and attentional costs of continuous and discontinuous bimanual circle drawing movements. Hum Move Sci 27:823–837
Swinnen SP (2002) Intermanual coordination: from behavioural principles to neural-network interactions. Nat Rev 3:350–361
Swinnen SP, Wenderoth N (2004) Two hands, one brain: cognitive neuroscience of bimanual Skill. Trends Cogn Sci 8:18–25
Swinnen SP, Lee TD, Verschueren S, Serrien DJ, Bogaerts D (1997) Interlimb coordination: learning and transfer under different feedback conditions. Hum Mov Sci 16:749–785
Temprado JJ, Zanone PG, Monno A, Laurent M (1999) Attentional load associated with performing and stabilizing preferred bimanual patterns. J Exp Psychol Hum Percept Perform 25:1579–1594
Treffner PJ, Turvey MT (1993) Resonance constraints on rhythmic movement. J Exp Psychol Hum Percept Perform 19:1221–1237
Wang S, Wang H, Yue L (2008) A novel knot-tying approach for minimally invasive surgical robot systems. Int J Med Robot 4:268–276
Wang C, Kennedy DM, Boyle JB, Shea CH (2013) A guide to performing difficult bimanual coordination tasks: just follow the yellow brick road. Exp Brain Res 230:31–40
Wilson AD, Collins DR, Bingham GP (2005a) Perceptual coupling in rhythmic movement coordination: stable perception leads to stable action. Exp Brain Res 164:517–528
Wilson AD, Collins DR, Bingham GP (2005b) Human movement coordination implicates relative direction as the information for relative phase. Exp Brain Res 165:351–361
Yamanishi J, Kawato M, Suzuki R (1980) Two coupled oscillators as a model for the coordinated finger tapping by both hands. Biol Cybern 37:219–225
Zanone PG, Kelso JAS (1992) Evolution of behavioral attractors with learning—Nonequilibrium phase-transitions. J Exp Psychol Hum Percept Perform 18:403–421
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have not received any financial support in this study and declare no conflict of interest.
Additional information
Communicated by Carlo Alberto Marzi.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kovacs, A.J., Wang, Y. & Kennedy, D.M. Accessing interpersonal and intrapersonal coordination dynamics. Exp Brain Res 238, 17–27 (2020). https://doi.org/10.1007/s00221-019-05676-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-019-05676-y