
Abstract
Very little is known about the effects of specific practice on motor learning of predictive balance control during novel bipedal gait. This information could provide an insight into how the direction and magnitude of predictive errors during acquisition of a novel gait task influence transfer of balance control, as well as yield a practice protocol for the restoration of balance for those with locomotor impairments. This study examined the effect of a variable practice paradigm on transfer of a novel asymmetric gait pattern in able-bodied individuals. Using a split-belt treadmill, one limb was driven at a constant velocity (constant limb) and the other underwent specific changes in velocity (variable limb) during practice according to one of three prescribed practice paradigms: serial, where the variable limb velocity increased linearly; random blocked, where variable limb underwent random belt velocity changes every 20 strides; and random practice, where the variable limb underwent random step-to-step changes in velocity. Random practice showed the highest balance control variability during acquisition compared to serial and random blocked practice which demonstrated the best transfer of balance control on one transfer test. Both random and random blocked practices showed significantly less balance control variability during a second transfer test compared to serial practice. These results indicate that random blocked practice may be best for generalizability of balance control while learning a novel gait, perhaps, indicating that individuals who underwent this practice paradigm were able to find the most optimal balance control solution during practice.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The human central nervous system (CNS) utilizes a multi-layered control strategy to maintain crucial aspects of locomotion when gait symmetry is compromised due to a changing environmental context such as uneven terrain, neurological injury, or unilateral lower limb amputation. One way to experimentally test the predictive control of gait is through use of asymmetric split-belt treadmill walking (SBW), a locomotor task where two belts on a treadmill are driven at different velocities. To those with a naturally symmetric gait, this task can be considered novel. Therefore, these individuals must adapt their gait pattern when belt velocities are different and subsequently de-adapt when treadmill belt speeds are tied, returning the subject to walking symmetry. Over the last two decades, many studies have used this task to address a variety of questions related to how individuals adapt to a novel gait pattern. Dietz et al. (1994), Reisman et al. (2005), and Morton and Bastian (2006) were the first to recognize specific predictive adaptations over time during performance of this task, namely changes in step length, double support time, and interlimb coordination. The role of the cerebellum has been clearly elucidated in these studies, as subjects with cerebellar damage have demonstrated an inability to make these predictive adjustments during asymmetric SBW (Morton and Bastian 2006). Furthermore, the potential to use this task as a rehabilitative tool has been demonstrated. Subjects with hemiparetic stroke have shown improved step length and double support symmetry when split-belt treadmill belt speeds are tied (Reisman et al. 2007), and during overground walking (Reisman et al. 2010) following a bout of asymmetric SBW. In addition, Lauziere et al. (2014) have demonstrated that individuals with hemiparetic stroke increase their plantar flexion moment post-adaptation on the paretic side when that limb is driven faster than the contralateral one during adaptation.
Despite these recent advances, it remains unknown how these predictive adaptations are stored. It is likely that the manner in which a practice paradigm introduces predictive errors during a bout of asymmetric SBW ultimately affects the transfer of this novel gait. When large errors are introduced during asymmetric SBW, subjects may attribute them to environmental conditions rather than their own internal errors, limiting transfer to overground walking (Torres-Oviedo and Bastian 2012). In addition, a small, gradual introduction of asymmetry results in improved retention and transfer of lower limb endpoint control (Sawers and Hahn 2013) and balance control (Sawers et al. 2013a), and reduced cognitive demand (Sawers et al. 2013b), compared to a sudden, large introduction of asymmetry. However, outside of these studies, it is unknown how further manipulation of error influences locomotor outcomes during and after acquisition of a novel gait task.
While Sawers and Hahn (2013) and Sawers et al. (2013a, b) have argued that minimization of errors improves gait performance while reducing practice difficulty, it is also possible that gradual training is more effective than a sudden one because of contextual interference. This noisy ordering of environmental conditions induces an error in task outcomes during motor skill practice due to a discrepancy between predicted and expected sensory feedback during acquisition of a novel motor task (Shea and Morgan 1979). However, the gradual training paradigm implemented in these studies was introduced in a linear fashion, which potentially allowed for subjects to predict the velocity of the treadmill belts prior to foot contact. Furthermore, Criscimagna-Hemminger et al. (2010) have postulated that while small errors seem to better drive retention during adaptation, large errors allow for better generalization of that task.
Interventions that utilize contextual interference as a training tool often induce a variable practice paradigm, where the task parameters from trial to trial are altered in an unpredictable fashion. The role of variable practice in motor learning has been investigated across a variety of sport-specific tasks. For example, Henz and Schollhorn (2016) have observed different brain activation patterns during variable practice of badminton racquet swings compared to constant practice. Wrisberg and Liu (1991) have shown how badminton players can increase accuracy on retention and transfer tests of different serves following a variable practice paradigm. In addition, Landin et al. (1993) used a variable practice paradigm that increased retention (but not transfer) of a basketball shot at the task goal level. In a rehabilitative setting, Hanlon (1996) showed how variable practice increased retention of a functional reaching task after stroke, while a review by Krakauer (2006) discussed how contextual interference is critical to increase transfer of rehabilitated motor skills post-stroke. These studies demonstrate how the role of variable practice in retention or transfer (or both) of a given task changes depending on the task itself and the skill level of the learner. Wu et al. (2014) have recently suggested that variability (or “noise”) in different experiments that alter practice conditions (such as force feedback) during various reaching tasks allows for neurologically intact individuals to explore the space of potential solutions to errors incurred during practice. This exploration induces a trial-and-error learning mechanism that ultimately improves retention of various motor learning outcomes such as accuracy of hand trajectory. In the context of motor learning of predictive gait parameters during an asymmetric SBW task, variable practice would require belt velocities to change in a way that is unpredictable. Theoretically, this paradigm would allow individuals to explore the space of possible learning outcomes and determine solutions to sensory discrepancies.
To date, the role of variable practice in locomotor adaptation to asymmetric SBW has not been studied. Rhea et al. (2012) do demonstrate how variable speed single-belt treadmill training does not promote increased retention of consistent gait dynamics in individuals who suffer from stroke, but their paradigm induced variable speed changes every minute. This effectively made for blocked practice. This group did recommend that future studies investigate the role of variable practice when treadmill belt speeds change stride-by-stride rather than every minute. While Torres-Oviedo and Bastian (2012) introduced a somewhat variable practice paradigm during a novel asymmetric SBW bout, the belt with varying velocities was consistently faster than the other. This led to some predictability that subjects could determine that one limb would be moving faster than the other. The predictability inherent in this study could have influenced the limited amount of overground transfer noted. Recently, it has been demonstrated that during acquisition of a novel asymmetric SBW task with one limb consistently faster than the other individuals assign a different role to the fast limb compared to the slow limb (Ogawa et al. 2014). It is possible that if it was unpredictable which role each limb would take during practice, then subjects could learn to walk asymmetrically context-free—where they would be able to effectively adapt their motor pattern to a novel context regardless of the velocity of each treadmill belt.
The purpose of this study was to examine the effects of a variable practice paradigm on transfer of balance control during asymmetric SBW. To implement this paradigm, subjects were recruited to undergo practice paradigms with varying levels of unpredictability and contextual interference (from most predictable to least and least contextual interference to most: serial practice, random blocked practice, and random practice). It was hypothesized that (1a) serial practice would be most predictable, and, therefore, individuals completing this paradigm would exhibit the least amount of balance control variability (the outcome measure of motor learning for this study, see “Methods”) during acquisition. In addition, it was hypothesized that (1b) random practice would be most unpredictable, demonstrated through the highest amount of balance control variability during acquisition. Second, it was hypothesized that (2a) serial practice would allow for minimization of errors during practice, leading to the least amount of balance control variability during a transfer test close to that which was previously experienced during acquisition. Conversely, (2b) random practice would demonstrate the highest amount of balance control variability during this test as step-to-step errors would be highest during acquisition. Finally, it was hypothesized that (3a) random practice would demonstrate the best generalizability of balance control variability during a transfer test where belt speeds were more drastically different than the acquisition experience, shown through the lowest variability. On the other hand, (3b) serial practice would have the least amount of generalization, demonstrated through the highest amount of variability.
Methods
Recruitment
Forty-eight able-bodied individuals were recruited for this study (Table 1). To be included in this study, subjects were required to be between the ages of 18 and 50 years, and have the ability to walk on a treadmill for up to 30 min without assistance. Subjects were excluded from this study if any cardiopulmonary, neurological, chronic lower limb musculoskeletal, or acute lower limb musculoskeletal injuries within the last 6 months were self-reported. In addition, subjects were excluded if they had any experience walking asymmetrically on a split-belt treadmill. Informed consent was obtained from all individual participants included in the study, and the university Institutional Review Board approved all study protocols.
Study design and experimental protocol
Subjects were asked to attend 2 days of experimental testing. On the first day, their self-selected walking speed (SSWS) was measured as the average time it took them to walk across a 20 m walkway four times. Next, all subjects underwent a 15-min acclimation phase on an instrumented split-belt treadmill (Bertec, Columbus, OH) where the velocity of both belts was tied to their SSWS. This phase was used to ensure gait consistency during treadmill walking (Zeni and Higginson 2010) and to measure symmetric balance control variability (see “Data analysis”). Next, subjects were randomly selected to undergo a serial, random blocked, or random training protocol of 720 strides, where their non-dominant limb (constant limb) was driven for all strides at their SSWS, while the dominant limb (variable limb) was driven according to the protocol which they were assigned. Limb dominance was determined as the limb that subjects would prefer to use to kick a soccer ball.
For serial practice, the subjects’ variable limb began at SSWS-0.5 m/s for the first stride and increased linearly by 1/720 m/s until belt velocity reached SSWS + 0.5 m/s on the 720th stride. Subjects in the random blocked practice group began with their variable limb set to a random velocity within ±0.5 m/s of their SSWS. This velocity remained constant for 20 strides and then changed to a new random velocity within ±0.5 m/s of their SSWS and ±0.5 m/s of the previous stride to limit the magnitude of changes in velocity. Finally, the random practice group experienced random velocity changes on their dominant limb every step within ±0.5 m/s of their SSWS and ±0.5 m/s of the previous stride. All protocols were preset and randomized according to their SSWS and the assigned protocol (Fig. 1). For the random and random blocked practice groups, belt velocities were randomized using a RANDI function in MATLAB with the aforementioned boundaries with regard to SSWS and the previous stride included. Control of treadmill velocities was automated using a custom-written MATLAB (Mathworks, Natick, MA) script previously established by Hinkel-Lipsker and Hahn (2016) as a way to ensure that belt velocities changed, while the individual’s dominant limb was in swing phase and fully accelerated prior to the subsequent heel strike to avoid additional perturbations, as well as remove any effect of errors by the treadmill operator in manually changing treadmill belt velocities. To analyze the effectiveness of the belt velocity randomizations and ensure that the range of belt velocities was the same for all groups, the mean variable limb belt velocity for each group for each stride was calculated (Fig. 2).

Study design. Forty-eight able-bodied subjects were recruited, and randomly selected to undergo serial, random blocked, or random practice. All subjects first completed a 15-min acclimation phase where both belts were tied to their SSWS. After a 10-s pause, the 720-stride acquisition phase began. The serial group had their variable limb driven at an increasing velocity with every stride, beginning with −0.5 SSWS and ending with +0.5 SSWS. The random blocked group began with their variable limb driven at a random velocity within ±0.5 m/s of SSWS, and the belt velocity changed every 20 strides to a new velocity within ±0.5 m/s of SSWS and within ±0.5 m/s of the previous stride. The random group had their variable limb driven at a random velocity for every stride within ±0.5 m/s of SSWS and ±0.5 m/s of the previous stride. All groups’ constant limb was driven at SSWS for the entire acquisition phase. Twenty-four hours later, 24 subjects completed a 400-stride transfer test (transfer 1) at a 1.5:1 m/s (variable:constant) of SSWS asymmetry, and 24 subjects completed a 400-stride transfer test (transfer 2) at a 2:1 m/s (variable:constant) of SSWS asymmetry

Distribution of variable limb belt velocities for serial, random blocked (RB), and random practice groups that completed either a transfer 1 or b transfer 2. For both a, and b, the serial and random practice groups had a spread encompassing the range of possible belt velocities, and a median velocity of approximately each participant’s SSWS [belt velocity − SSWS (m/s) = 0]. As the random blocked practice groups only had 36 possible belt velocities during acquisition, the median velocity was higher than 0 for both, although the spread ranged from approximately −0.4 to +0.4 m/s. Serial practice experienced a nonparametric distribution for both the c transfer 1 and f transfer 2 groups on the variable limb. Random blocked practice experienced a non-Gaussian distribution of belt velocities for both d transfer 1 and g transfer 2, as there were only 36 possible belt velocities that the randomization function could use. This resulted in most belt velocities being above SSWS. Random practice had an approximately Gaussian distribution for both e transfer 1 and h transfer 2, due to 720 different strides being randomized
On the second day of testing, subjects were randomly assigned to complete one of two different transfer tests (Fig. 1). These tests occurred exactly 24 h after the start of testing on the first day to allow for consolidation of motor memories (Brashers-Krug et al. 1996) and to allow the adapted locomotor pattern time for washout during overground walking in 24 h between tests. Within the area of motor skill learning, transfer tests for the ability of individuals were to generalize their newly learned skill to a novel context, as individuals apply their previous experiences in a way where task performance is still possible using recognition schema (Newell 1991; Schmidt 1975; van Kesteren et al. 2012). One transfer test (transfer 1; T1) was assigned to measure generalizability of this task to a context close to that of an asymmetry experienced during acquisition; a 1.5:1 (dominant:non-dominant) ratio of SSWS asymmetry over 400 strides. This asymmetry was chosen, because the maximum velocity of the variable limb treadmill belt was 0.5 m/s faster than SSWS during acquisition. Therefore, for transfer 1, where variable limb belt velocity was 1.5 × SSWS, individuals walked at an asymmetry close to that of the maximum variable limb belt velocity during acquisition. For the second transfer test (transfer 2; T2), a 2:1 (dominant:non-dominant) ratio of SSWS asymmetry was applied for 400 strides. This asymmetry was chosen to make the context as novel and challenging as possible while ensuring that subjects’ dominant limb was not moving so fast as to cause them to run, which is a different motor pattern not influenced by an enhanced recognition schema for walking. Together, subjects were tested for generalization in two different contexts: one where walking asymmetry was close to that of a previous experience, and one further away. This effectively made for six groups, as each subject completed one of the three acquisition protocols and one of two transfer tests. It should be noted that the term “transfer” here refers to the transfer of this learned gait asymmetry to an unpracticed walking context on a split-belt treadmill. Other groups who have used SBW as a rehabilitative tool have also investigated the transfer of this skill from the treadmill to overground walking, which effectively is testing for a different form of skill generalization (Reisman et al. 2007).
Data collection
Prior to the acclimation phase on the first day, demographic data including age, sex, height, and weight were recorded (Table 1). Before implementation of the experimental protocol on both days, 54 reflective markers were placed on participants’ bony landmarks (Sawers and Hahn 2012) and 3D marker coordinate data were collected at 60 Hz for the final 20 strides of acclimation and throughout the acquisition and transfer 1/transfer 2 phases using an 8-camera motion capture system (Motion Analysis, Santa Rosa, CA). These data were synchronized with ground reaction force (GRF) data collected from two force plates (Bertec, Columbus, OH), one underneath each treadmill belt, at 1200 Hz using Cortex motion capture software (Motion Analysis, Santa Rosa, CA).
Data analysis
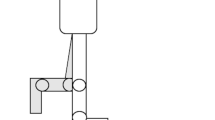
Three-dimensional marker coordinate data were low-pass filtered using a fourth-order Butterworth with a 5 Hz cut-off frequency, and used to build a 13-segment whole-body model using Visual 3D (C-Motion, Germantown, MD), while GRF data were low-pass filtered using a fourth-order Butterworth with a 45-Hz cut-off frequency (Sawers et al. 2013a). Next, whole-body COM position was calculated as the weighted sum of body segments. Then, the frontal inclination angle (FIA) was calculated using a custom-written MATLAB script (Mathworks, Natick, MA) as the angle between a vector from the COM to the lateral malleolus of the heel-striking foot with respect to vertical, projected onto the frontal plane, or (Eq. 1; Fig. 3):
where \(\overrightarrow {{\varvec{COMa}}}\) is the vector from the whole-body COM to the lateral malleolus, \(\overrightarrow {{\varvec{COMv}}}\) is the vertical vector from the whole-body COM, and \(\theta\) is the angle between the two. This measure was taken at heel strike. Heel strike was determined as the first GRF sample of that stride where vertical GRF >10 N. The FIA was chosen as a measure of balance control, because foot placement in the frontal plane is crucial for maintaining mediolateral balance control and altering frontal plane COM position (Bauby and Kuo 2000; MacKinnon and Winter 1993; Sawers et al. 2013a) and is capable of detection of gait imbalances (Chen and Chou 2010; Hugan et al. 2008). These discrete FIA values at heel strike were calculated for each stride and each limb (constant and variable), and were averaged for every 20 strides. Next, the standard deviation (SD) of each block of 20 FIA values for acclimation, acquisition, and transfer 1/transfer 2 was calculated as a measure of variability in the balance control system.

Frontal inclination angle during walking, measured as the angle between a vertical vector from the whole-body center of mass (see vector on right) and a vector from the whole-body center of mass to the lateral malleolus of the heel-striking leg projected onto the frontal plane (see vector on left)
To make comparisons on the effects of practice group on balance control variability, the average FIA SD for all blocks throughout acquisition and transfer 1/transfer 2 was calculated. Then, the average FIA SD during the last 20 strides of acclimation was subtracted from each block during acquisition and transfer 1/transfer 2 as a way to find the difference between natural gait variability during symmetrical walking (Winter 1984) and variability during acquisition and transfer 1/transfer 2. Thus, this metric, previously termed the average uncertainty residual (AUR), reflects the overall amount of variability in foot placement during different tests (Sawers and Hahn 2013; Sawers et al. 2013a) relative to symmetric gait. It should be noted that this measure is not necessarily one that is optimized by the CNS during adaptation, but rather was chosen as a metric of motor learning due to the aforementioned reasons.
Statistical analysis
To compare the effect of practice schedule on balance control during acquisition, transfer 1, and transfer 2 of this novel gait pattern, a three-way ANOVA (α = 0.05) was performed using SPSS v.23 (IBM, Armonk, NY) with practice schedule (serial, random blocked, and random), limb (constant and variable), and test (acquisition, transfer 1, and transfer 2) as independent variables and AUR as the dependent variable. Assumptions of no outliers, normality, and homogeneity of variance were tested (see “Results”). When significant main effects were revealed, Bonferroni-adjusted pairwise comparisons were made.
Results
Forty-eight able-bodied participants were enrolled in this study. In testing for assumptions for the ANOVA comparing practice schedules, it was noted that there were two extreme outliers in the data set. One, a subject with a random blocked acquisition given a transfer 2 test, had an extremely high AUR for both limbs during the transfer test. It is likely that this was the case because their SSWS was measured to be 1.64 m/s, making the treadmill velocity for their variable limb during the transfer test to be 3.28 m/s, which is a typical slow running velocity. Since they had one limb at a walking velocity and one at a running velocity, this provided a methodological reason to remove AUR for both limbs for this participant from the data set as comparisons could not be made with other participants who had walking velocities on both limbs. The other extreme outlier was for the constant limb for a subject in the random practice group who completed a transfer 2 test. This subject had an SSWS within the normal range for that group, and, therefore, no methodological reason could be provided to remove this subject from analysis. As such, the assumption of normality was violated for this group (random transfer 2, acquisition, constant limb; Shapiro–Wilk test, p < 0.05). However, ANOVA is robust to violations of the normality assumption (Schmider et al. 2010). In addition, the assumption of homogeneity of variance was also violated (Levene’s test, p < 0.05), which could possibly be due to the unequal sample sizes observed when the outlier was removed, or a relatively small overall sample size (Rogan and Keselman 1977). To maintain an ability to interpret these data clinically, no transformations were made on the data set and the outlier remained excluded. Thus, it should be noted that due to the heterogeneity of variance in this data set, the probability of type I error might be inflated by 2–4% (Rogan and Keselman 1977).
The model effects of the ANOVA revealed significant main effects of test (F = 12.622, p < 0.05, \(\eta_{p}^{2}\) = 0.132) and group (F = 14.667, p < 0.05, \(\eta_{p}^{2}\) = 0.150), and significant test × group (F = 12.197, p < 0.05, \(\eta_{p}^{2}\) = 0.227) and test × limb F = 4.801, p < 0.05, \(\eta_{p}^{2}\) = 0.055) interactions. The main effect of the limb was not statistically significant nor was the limb × group and test × limb × group interaction. Based on the significant main effects and interactions, Bonferroni-adjusted pairwise comparisons were made between each pair of groups (serial, random blocked, and random) within each test (acquisition, transfer 1, and transfer 2), as well as within-subject comparisons to examine the difference between acquisition and transfer 1/transfer 2, as a measure of learning. Due to a main effect of the limb or the limb × group and test × limb × group interactions not being statistically significant, no between-limb pairwise comparisons were made.
For acquisition, the random practice group had a significantly higher AUR compared to the serial practice group (p < 0.001; Fig. 4) and random blocked practice group (p < 0.001; Figs. 4, 5a, b). The AUR for the serial and random blocked practice groups was not significantly different (Figs. 4, 5a, b). During transfer 1, random blocked practice had a significantly lower AUR compared to serial practice (p < 0.05; Fig. 4) and random practice (p < 0.05; Fig. 4). In addition, neither serial nor random practice groups had significantly different AURs from each other and had similar re-adaptation trends over time (Fig. 6a, b). Finally, during transfer 2, serial practice resulted in a significantly higher AUR compared to both random blocked practice (p < 0.05; Figs. 4, 6c, d) and random practice (p < 0.05; Figs. 4, 6c, d). Furthermore, the adaptation trends over time reflect that serial practice resulted in an overall larger and more variable FIA SD during transfer 2 (Fig. 6c, d).

Average uncertainty residual of acquisition and two transfer tests of asymmetric split-belt treadmill walking during and following either serial, random blocked, or random practice. Random practice was most difficult during acquisition, as evidenced by a significantly (**p < 0.001) greater AUR compared to serial and random blocked practice groups, who did not have a significantly more or less challenging practice experience than each other. Random blocked practice resulted in a significantly (*p < 0.05) lower AUR compared to the other two groups during T1, while serial practice resulted in a significantly higher AUR during T2 compared to both groups

Group mean frontal inclination angle standard deviations (FIA SDs) during the 720-stride acquisition phase in blocks of 20 strides for a the constant limb and b the variable limb. After the initial perturbation, both the serial and random blocked (RB) practice groups demonstrated FIA SDs close to zero, reflecting variability in mediolateral foot placement close to that of natural, symmetric gait variability. The RB practice group had occasionally larger FIA SDs on both limbs due to the sometimes large changes in variable limb velocity from block to block. The random practice group had a consistently large FIA SD, due to the variable limb belt velocity changing with every stride. These data indicate that random practice was more challenging to frontal plane balance control on a step-to-step basis compared to the other two practice groups, and serial practice was least challenging

Group mean frontal inclination angle standard deviations (FIA SDs) in blocks of 20 strides during the 400-stride T1 test for the a constant limb and b variable limb and 400-stride T2 test for the c constant limb and d variable limb. The serial practice group had a larger initial variability during T1 for both limbs, possibly due to the difference in perturbation size from that of their acquisition experience, and generally higher variability throughout the T1 test. Random blocked (RB) resulted in transfer values lower than 0, indicating less variability than natural, symmetric gait. Random practice resulted in variability near 0 for the constant limb, and higher variability for the variable limb. For T2, both RB and random practice groups exhibited low (close to 0) variability on the constant limb, and slightly higher values on the variable limb. The serial practice group demonstrated high variability on both limbs during the T2 test
Discussion
The three groups experienced a very similar range of belt velocities on their dominant limb during acquisition (Fig. 2). This analysis indicates that the randomization protocols that were set prior to the acquisition phase were effective in implementing a practice schedule within the boundaries set, and that no subject experienced a range of belt velocities outside of ±0.5 m/s of their SSWS. Thus, for all groups, the 1.5:1 (dominant:non-dominant) transfer 1 protocol tested for an asymmetry that subjects had come close to experiencing the day before, while the 2:1 transfer 2 protocol tested for a more novel asymmetry. However, the random blocked practice group had a median velocity greater than SSWS and a slightly smaller range of values (Fig. 2). In addition, the belt velocities were clustered for the random blocked practice group more towards the faster end of the range of possible values (Fig. 2d, g). This is likely because the velocities were only randomized 36 times (36 blocks of 720 strides), while the serial and random practice groups had 720 different velocities. This, in addition to the constraints placed on the randomization function (where the next random velocity had to be within ±0.5 m/s of SSWS and ±0.5 m/s of the previous stride’s velocity), likely resulted in the non-Gaussian distribution shown here.
During acquisition, it was revealed that the random practice group had a significantly greater AUR compared to the serial and random blocked practice groups. This supports hypothesis 1a. While it is not surprising that balance control was adversely affected when belt velocities changed randomly with every step, this finding does align with Schmidt’s (1975) original idea that the challenge presented during variable practice should be difficult and noisy to promote exploration of the task goals (Cohen and Sternad 2009). However, hypothesis 1b is not supported, as AUR for serial practice was not significantly lower than that of random blocked practice. An examination of the time series plots for acquisition and the AUR SD for the serial and random blocked groups (Fig. 5a, b) reveals that serial practice resulted in a more consistent AUR for each block of 20 strides, while random blocked practice was more variable, likely because of the possibility of a large change in belt velocity every 20 strides. This indicates that while the magnitude of errors experienced by serial practice was lower, it did not result in an overall lower AUR than random blocked practice. As the main effect of limb and the limb × group interaction were not significant, there did not seem to be a strategy for error minimization on one limb compared to the other. Previous studies have revealed asymmetric limb differences during adaptation to SBW, such as step length and double support time (Reisman et al. 2005), braking GRF (Ogawa et al. 2014), lower limb muscle activation (MacLellan et al. 2014; Ogawa et al. 2014), and phase shift between limbs (Torres-Oviedo and Bastian 2012). However, these studies were designed so that one limb was always faster than the other. Since this study involved all groups’ variable limb spending approximately equal time moving faster and slower, one limb could not adapt to become the fast or the slow limb in this context.
The transfer 1 data do not support hypothesis 2a or 2b, since AUR for random blocked practice was significantly lower than both serial and random practices. Moreover, serial practice had the highest AUR (although not significantly higher than random). These findings are somewhat aligned with those of Roemmich and Bastian (2015) albeit with frontal instead of sagittal plane outcome measures. They found that gradual training (slowly incrementing the belt speeds) resulted in significantly less savings (or re-adaptation following a washout period) than abrupt training (one large perturbation followed by a constant belt speed) during a second bout of asymmetric SBW adaptation. This group attributed these findings to the notion that abrupt training allowed participants to form a more accurate perception of their walking environment during acquisition. In this study, a similar interpretation can be made. Since the random blocked practice group had large perturbations followed by a round of constant belt velocities during acquisition, this environment mimics that of the transfer 1 test, which abruptly went to a 1.5:1 asymmetry on the first step and remained there throughout the test. As seen in the first block of 20 strides during transfer 1 (Fig. 6a, b), serial practice resulted in an FIA SD 2–3 times that of random blocked practice, followed by a consistently greater set of FIA SDs. Overall, these results indicate that random blocked practice performed best on transfer 1 with respect to balance control, possibly because the transfer 1 task mimicked that of their acquisition experience, allowing for subjects to easily generalize their acquisition experience to a context that requires only slight changes in walking parameters compared to what was experienced during acquisition.
However, because AUR for random blocked practice was less than zero for both limbs, this means that these individuals walked with less variability in frontal plane foot placement than their natural, symmetrical gait. One possible explanation for this phenomenon may be increased attentional focus due to increased task difficulty, and, therefore, greater cognitive control of balance (Wulf et al. 2007). Another reason for this result is that the reduction in variability may have occurred as a result of this group having additional practice during acquisition where the variable limb was moving faster than the constant limb. To expand on this, Herzfeld et al. (2014) have recently shown that individuals have the capacity to form a memory of errors experienced during practice of a given motor task. Since the random blocked group here experienced more errors closer to the transfer 1 belt velocities, it is possible that that they were better able to recognize those errors during the transfer 1 test. It should also be noted that too little step width variability is also associated with imbalance and fall risk (Brach et al. 2005). Ultimately, it is possible that the low AUR demonstrated by the random blocked group is not necessarily equivalent to better walking performance. Future studies should examine the lower limb kinematic and kinetic adaptations of random blocked practice during asymmetric SBW to confirm that the low foot placement errors are not detrimental to long-term musculoskeletal health if this paradigm is used as a rehabilitative tool.
An examination of balance control performance during the transfer 2 task reveals that hypotheses 3a and 3b are partially supported. While random practice did not result in a significantly lower AUR than random blocked practice, it was significantly lower than serial practice (Fig. 4). In addition, serial practice had a higher AUR than random blocked practice in this test. Thus, it seems that serial practice is not an effective paradigm to generalize the newly acquired gait pattern to new contexts, as previously noted in other studies observing motor learning of other tasks (Hall and Magill 1995). This result further indicates that the trial-and-error learning system described by Wu et al. (2014) was not engaged due to the small magnitude of errors incurred during practice. Conversely, the high level of contextual interference during both random blocked and random practice did allow for this trial-and-error mechanism to occur, supporting the previous postulations by Criscimagna-Hemminger et al. (2010). In examining changes in FIA SD over the course of the transfer 2 test (Fig. 6c, d), it appears that both random and random blocked practice resulted in these groups limiting balance control variability on the constant limb, while allowing more on the variable limb. There may have also been a difference in cognitive engagement during acquisition that adversely affected the serial practice group’s transfer 2 performance, as it has been reported that large errors during acquisition (as experienced during random blocked and random training) invoke a greater cognitive challenge, thereby allowing the CNS to acquire greater explicit information during practice and apply it to the new context (Roemmich and Bastian 2015; Sawers et al. 2013a). This was likely the case for the random blocked and random groups.
Taken together, it seems that random blocked practice is effective in engaging the two learning mechanisms associated with large and small errors (Criscimagna-Hemminger et al. 2010) in performance of a novel asymmetric gait pattern, as balance control variability was similar to that of serial practice during acquisition, and significantly lower during transfer 1 compared to both groups and transfer 2 compared to the serial practice group. This advances the idea that predictive elements of locomotor adaptation can be trained through specific practice scheduling (Sawers and Hahn 2013; Sawers et al. 2013a). Although there was no difference in AUR between random blocked and random practice during transfer 2, it is evident that the greater challenge to balance control presented by random practice is unnecessary to optimally drive motor learning, as random blocked AUR was lower during acquisition. It is also possible that random blocked practice meets the optimal challenge point discussed in the previous motor learning literature, where too much or too little noise during practice is detrimental to learning performance (Guadagnoli and Lee 2004).
There are some notable clinical implications for rehabilitation of asymmetric gait given the results of this study. First, powered ankle–foot prostheses, which restore ankle power in those with lower limb amputation to nearly biomimetic levels, are now commercially available (Herr and Grabowski 2012). However, it is unknown what the long-term adaptation strategies to a restoration of ankle power are for those with amputation that have adapted to using a passive-elastic prosthesis (which do not fully restore ankle power). It may be necessary to train these individuals to control their device in a metabolically efficient and safe manner, especially since the next step for these prostheses is to use myoelectric controllers to proportionally actuate ankle power (Huang et al. 2014). In this case, training these individuals to acquire a new, symmetrical gait pattern with these prostheses may involve random blocked training for generalizability (transfer), where they can control the prosthesis in new environmental contexts. Second, those with neurological unilateral gait deficiencies, such as individuals with stroke, have shown improved overground walking symmetry following asymmetrical SBW practice (Reisman et al. 2007). While the possibility exists, given the results described here, that they may demonstrate even greater overground transfer following a random blocked SBW intervention, overground transfer was not measured in this study. However, the results of this study may not be applicable to these individuals, as it was previously discussed that random blocked practice may have been most effective for transfer close to a previous practice context due to the abrupt perturbation every 20 strides during acquisition and at the beginning of transfer 1, something that would not happen during overground walking, thereby limiting the generalizability of this task to overground walking.
Some limitations may have affected the results of this study. First, in comparing the effects of practice group on acquisition, transfer 1, and transfer 2, there was one outlier left in the data set, causing a violation of the normality assumption. This outlier was not removed from the data set, because there was no methodological reason to remove it, and, therefore, this data point is representative of a learning experience from an able-bodied sample population. Another outlier was removed, causing unequal sample sizes between groups, which is possibly the reason for violation of the homogeneity of variance assumption. These data were removed for methodological reasons (see “Results”), and would have caused a further violation of normality if left in. Second, AUR was used as a metric for motor learning in this study, as it reflects a predictive (and, therefore, trainable) element of gait that has previously been shown to be sensitive to changes in balance. Since it was calculated as the mean across all strides for each phase of testing, it is possible that it did not capture enough resolution to identify small adaptive changes. On the other hand, given the time series of FIA SD across all strides, it seems that the rate of adaptation did not differ between groups, and, therefore, it was deemed that detailed time series analyses were not necessary. In addition, due to the study design, the random blocked practice group had the ability to practice multiple strides of the same asymmetry, while the serial and random groups did not. Because of this, the median velocity during acquisition being closer to the variable limb transfer 1 velocity, and the greater clustering of belt velocities above SSWS, it is possible that they received more practice at an asymmetry closer to that of the 1.5:1 transfer 1 test. However, serial practice had the benefit of always practicing a 1.5:1 asymmetry for the final stride of acquisition, and random practice experienced asymmetries at or close to 1.5:1 at some point during their acquisition experience. In addition, the transfer tests were designed so that the variable limb was going at a faster velocity than the constant limb to make those tasks as challenging as possible, while during acquisition all subjects experienced variable limb velocities slower and faster than the constant limb to increase contextual interference and unpredictability. Thus, these data are not generalizable to recall and recognition of asymmetries where the variable limb is moving at a slower velocity than the constant limb. Finally, this study did not set the belt velocities to be equal for all groups, but rather set them to be a function of each individual’s SSWS. Thus, individuals with a fast SSWS and short leg length may have experienced a walking gait on the constant limb and running gait on the variable limb, which is a different motor pattern likely not saved by these practice paradigms. However, there were no differences in SSWS or height between groups (Table 1); therefore, if this occurred, then it likely did not affect one group more than the other.
Conclusions
This study sought to determine if a variable practice paradigm is applicable to improved performance of a predictive gait parameter, mediolateral balance control variability, during learning of a novel asymmetric gait pattern. It was found that random practice results in a significantly higher challenge to balance control during acquisition, but that random blocked and serial practice are not more challenging than each other. On a transfer test with a walking environment close to that of acquisition, random blocked practice had a significantly lower amount of balance control variability compared to random and serial practice. While this may indicate that random blocked practice results in the best generalizability to slightly novel contexts, this variability was lower than that of symmetric gait, raising questions as to whether gait strategy was actually indicative of a better performance. Transfer 2 test data reveal that serial practice resulted in a much higher balance control variability compared to the other two groups, indicating the limited generalizability that this practice paradigm provides. Overall, random blocked practice presents a lesser challenge during acquisition, while performing better than random practice during transfer 1 and similarly during transfer 2. Thus, it is likely that random blocked practice meets the optimal challenge required to best drive motor learning during acquisition of this task. These results may help to provide a framework for future rehabilitative protocols using a split-belt treadmill, and help to further clarify the role of error magnitude and direction in locomotor adaptation. Future studies should further investigate this phenomenon by assessing specific biomechanical variables that are altered as a result of changing practice paradigms, to determine if the balance control differences noted here are the result of a differing kinematic and kinetic strategy invoked by the CNS.
References
Bauby CE, Kuo AD (2000) Active control of lateral balance in human walking. J Biomech 33:1433–1440
Brach JS, Berlin JE, VanSwearingen JM, Newman AB, Studenski SA (2005) Too much or too little step width variability is associated with a fall history in older persons who walk at or near normal gait speed. J Neuroeng Rehabil 2:21. doi:10.1186/1743-0003-2-21
Brashers-Krug T, Shadmehr R, Bizzi E (1996) Consolidation in human motor memory. Nature 382:252–255
Chen C-J, Chou L-S (2010) Center of mass position relative to the ankle during walking: a clinically feasible detection method for gait imbalance. Gait Posture 31:391–393
Cohen RG, Sternad D (2009) Variability in motor learning: relocating, channeling, and reducing noise. Exp Brain Res 193:69–83
Criscimagna-Hemminger SE, Bastian AJ, Shadmehr R (2010) Size of error affects cerebellar contributions to motor learning. J Neurophysiol 103:2275–2284
Dietz V, Zijlstra W, Duysens J (1994) Human neuronal interlimb coordination during split-belt locomotion. Exp Brain Res 101:513–520
Guadagnoli MA, Lee TD (2004) Challenge point: a framework for conceptualizing the effects of various practice conditions in motor learning. J Mot Behav 36:212–224
Hall KG, Magill RA (1995) Variability of practice and contextual interference in motor skill learning. J Mot Behav 27:299–309
Hanlon RE (1996) Motor learning following unilateral stroke. Arch Phys Med Rehabil 77:811–815
Henz D, Schollhorn WI (2016) Differential training facilitates early consolidation in motor learning. Front Behav Neurosci. doi:10.3389/fnbeh.2016.01999
Herr HM, Grabowski AM (2012) Bionic ankle-foot prosthesis normalizes walking gait for persons with leg amputation. Proc R Soc B 279:457–464
Herzfeld DJ, Vaswani PA, Marko MK, Shadmehr R (2014) A memory of errors in sensorimotor learning. Science 345:1349–1353
Hinkel-Lipsker JW, Hahn ME (2016) A method for automated control of belt velocity changes with an instrumented treadmill. J Biomech 49:132–134
Huang S, Wensman JP, Ferris DP (2014) An experimental powered lower limb prosthesis using proportional myoelectric control. J Med Dev 8:024501
Hugan S-C, Lu T-W, Chen H-L, Wang T-M, Chou L-S (2008) Age and height effects on the center of mass and center of pressure inclination angles during obstacle-crossing. Med Eng Phys 30:968–975
Krakauer JW (2006) Motor learning: its relevance to stroke recovery and neurorehabilitation. Curr Opin Neurol 18:84–90
Landin DK, Hebert EP, Fairweather M (1993) The effects of variable practice on the performance of a basketball skill. Res Q Exerc Sport 64:232–237
Lauziere S, Mieville C, Betschart M, Duclos C, Aissaoui R, Nadeau S (2014) Plantarfelxion moment is a contributor to step length after-effect following walking on a split-belt treadmill in individuals with stroke and healthy individuals. J Rehabil Med 46:849–857
MacLellan MJ, Ivanenko YP, Massaad F, Bruin SM, Duysens J, Lacquaniti F (2014) Muscle activation patterns are bilaterally linked during split-belt treadmill walking in humans. J Neurophysiol 111:1541–1552
MacKinnon CD, Winter DA (1993) Control of whole body balance in the frontal plane during human walking. J Biomech 26:633–644
Morton SM, Bastian AJ (2006) Cerebellar contributions to locomotor adaptations during split-belt treadmill walking. J Neurosci 26:9107–9116
Newell KM (1991) Motor skill acquisition. Ann Rev Psychol 42:213–237
Ogawa T, Kawashima N, Ogata T, Nakazawa K (2014) Predictive control of ankle stiffness at heel contact is a key element of locomotor adaptation during split-belt treadmill walking in humans. J Neurophysiol 111:722–732
Reisman DS, Block HJ, Bastian AJ (2005) Interlimb coordination during locomotion: what can be adapted and stored? J Neurophysiol 94:2403–2415
Reisman DS, Wityk R, Silver K, Bastian AJ (2007) Locomotor adaptation on a split-belt treadmill can improve walking symmetry post-stroke. Brain 130:1861–1872
Reisman DS, Bastian AJ, Morton SM (2010) Neurophysiologic and rehabilitation insights from the split-belt and other locomotor adaptation paradigms. Phys Ther 90:187–195
Rhea CK, Wutzke CJ, Lewek MD (2012) Gait dynamics following variable and constant speed gait training in individuals with chronic stroke. Gait Posture 36:332–334
Roemmich RT, Bastian AJ (2015) Two ways to save a newly learned motor pattern. J Neurophysiol 113:3519–3530
Rogan JC, Keselman HJ (1977) Is the ANOVA F-test robust to variance heterogeneity when sample sizes are unequal?: an investigation via a coefficient of variation. Am Educ Res J 14:493–498
Sawers A, Hahn ME (2012) Regulation of whole-body frontal plane balance varies within a step during unperturbed walking. Gait Posture 36:322–324
Sawers A, Hahn ME (2013) Gradual training reduces practice difficulty while preserving motor learning of a novel locomotor task. Hum Mov Sci 32:605–617
Sawers A, Kelly VE, Kartin D, Hahn ME (2013a) Gradual training reduces the challenge to lateral balance control during practice and subsequent performance of a novel locomotor task. Gait Posture 38:907–911
Sawers A, Kelly VE, Hahn ME (2013b) Effects of gradual versus sudden training on the cognitive demand required while learning a novel locomotor task. J Mot Behav 45:405–414
Schmider E, Ziegler M, Danay E, Beyer L, Buhner M (2010) Is it really robust? Reinvestigating the robustness of ANOVA against violations of the normal distribution assumption. Methodology 6:147–151
Schmidt RA (1975) A schema theory of discrete motor skill learning. Psychol Rev 82:225
Shea JB, Morgan RL (1979) Contextual interference effects on the acquisition, retention, and transfer of a motor skill. J Exp Psychol-Hum Learn Mem 5:179–187
Torres-Oviedo G, Bastian AJ (2012) Natural error patterns enable transfer of motor learning to novel contexts. J Neurophysiol 107:346–356
van Kesteren MTR, Ruiter DJ, Fernandez G, Henson RN (2012) How schema and novelty augment memory formation. Trends Neurosci 35:211–219
Winter DA (1984) Kinematic and kinetic patterns in human gait: variability and compensating effects. Hum Mov Sci 3:51–76
Wrisberg CA, Liu Z (1991) The effect of contextual variety on the practice, retention, and transfer of an applied motor skill. Res Q Exerc Sport 62:406–412
Wu H, Miyamoto Y, Gonzales-Castro LN, Olveczky BP, Smith MA (2014) Temporal structure of motor variability is dynamically regulated and predicts motor learning ability. Nat Neurosci 17:312–321
Wulf G, Tollner T, Shea CH (2007) Attentional focus effects as a function of task difficulty. Res Q Exerc Sport 78:257–264
Zeni JA Jr, Higginson JS (2010) Gait parameters and stride-to-stride variability during familiarization to walking on a split-belt treadmill. Clin Biomech 25:383–386
Acknowledgements
Thanks to Tyde Kaneshiro, B.S., Chehala Jansen-Byrkit, B.S., Tyler Baca, B.S., and Eito Okino, B.S. for the assistance with data collection and motion analysis post-processing.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki declaration and its later amendments or comparable ethical standards.
Rights and permissions
About this article

Cite this article
Hinkel-Lipsker, J.W., Hahn, M.E. The effects of variable practice on locomotor adaptation to a novel asymmetric gait. Exp Brain Res 235, 2829–2841 (2017). https://doi.org/10.1007/s00221-017-5015-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-017-5015-3