
Abstract
This paper deals with the influence of velocity on the postural adjustments that occur during the course of a voluntary movement, that is to say, simultaneous postural adjustments (SPA). To this aim, a pointing task performed at different velocities (V) was considered. Upper limb kinematics and body kinetics were recorded. Using a 2-DOF model, the body was divided into two parts: the right upper limb (termed the “focal” chain) and the rest of the body (termed the “postural” chain). This model allowed us to calculate the kinetics of both subsystems (−F x and \( R_{\text{x}}^{{\prime }} \)), with one corresponding to the resultant action on the shoulder (AoSh: −F x) and the other to the resultant reaction of the shoulder (RoSh: \( R_{\text{x}}^{{\prime }} \)). The influence of pointing velocity on peak amplitudes and durations was evaluated, as was their instantaneous relationship (“Lissajous ellipse”). The results showed that RoSh and AoSh display similar diphasic profiles, whose amplitude and duration vary with movement velocity. In addition, RoSh is in phase advance of AoSh, the advance being all the shorter as the focal movement velocity becomes faster. Finally, SPA appears to play a dual role, which includes a propulsive action during upper limb acceleration and body stabilization during deceleration. These new findings strengthen the hypothesis that the postural chain is programmed according to task velocity in the same way as the focal chain and that both are coping in order to make the task more efficient.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
This study aims to gain new insights into the postural adjustments that occur during the course of a voluntary movement [“simultaneous postural adjustments” (SPA)]. It is based on a general framework in which motor control is hypothesized to include focal and postural components, in accordance with Gelfand et al. (1966). The former refers to the body segments that are mobilized in order to perform a voluntary movement and the latter to the rest of the body, which is involved in stabilizing reactions. The partitioning of the body into a “focal chain” and a “postural chain” (Bouisset and Zattara 1981) was a direct consequence of this assumption.
More precisely, it was hypothesized by Bouisset and Do (2008) that the postural chain plays a dual role that includes postural stabilization and propulsive action, with one prevailing over the other, depending on the time instant of movement evolution. The aim of this study was to explore more deeply the dual role of SPA, that is to say, the role of the postural chain during the course of movement, and to examine the extent to which we can hypothesize that SPA can be programmed in relation to movement velocity [see Massion (1992) for a review].
In our study, the task was to hit a target with the index finger. The voluntary movement involved the movement of the upper limb in order to allow the index finger to accomplish the task. Thus, the simplest option was to consider that the focal chain corresponds to the upper limb and the postural chain represents the rest of the body, as has been the case in many existing studies (for a review, see Bouisset and Do 2008). This assumption was supported by previous experimental data on the same paradigm (Lino 1995; Teyssèdre et al. 2000) and by classical data on functional anatomy and motor physiology.
In order to evaluate SPA, various methods have been proposed by authors such as Brenière et al. (1987) and Patla et al. (2002) in their studies on locomotion. In addition, Triolo et al. (2001) proposed a three-dimensional (3-D) model of the upper extremities for the purpose of estimating postural disturbances generated by various arm movements. Unfortunately, they did not consider postural adjustments in relation to voluntary movement. A simple 2-DOF model has also been elaborated (Richardson et al. 2012; Fourcade et al. 2014), which distinguished between the focal chain and the postural chain. In particular, it allowed for the calculation of the kinetics of both subsystems and a comparison of the resultant reaction (RoSh) with the corresponding action (AoSh) at shoulder level, as reported previously by Fourcade et al. (2014). Such a comparison helps in determining the extent to which the main features of SPA are dependent on movement velocity and affords new insights into postural programming. The evidence obtained from healthy subjects contributes to further specification of the differences associated with motor impairment.
Materials and methods
Nine right-handed adults (age: 24.6 ± 7.2 years; body weight: 74.4 ± 14.5 kg; height: 1.80 ± 0.06 m) participated in the experiments. None of them had any history of neurological or musculo-skeletal disorder, and all of them had normal vision. They gave their informed consent, and the experiments were conducted in accordance with legal requirements (Huriet’s law).
The subjects were seated on a stool, positioned on a force platform (see below), with approximately 30 % of the ischio-femoral length in contact with the seat, the feet in contact with the force platform (see below), and the upper arms vertical, the forearms horizontal and the right index finger outstretched. The right wrist joint was constrained by a plastic splint to reduce the upper limb’s degrees of freedom. The instruction was to tap with the right index finger on a soft target (diameter: 5 cm) and to stop for 3–5 s before returning to the initial position. The target was located in front of the subject at shoulder level and at the maximal reach distance. Each subject was invited to perform one series of nine pointing movements at maximal velocity (series #1) to achieve the maximal performance, and one series of nine pointing movements at progressively decreasing velocities (series #2). The subjects were asked to take care to perform these submaximal movements, like the maximal ones, in a continuous way (that is, in a “no jerk” condition, Hogan 1984). In order to acquire the necessary adaptation to experimental conditions, the subjects were allowed to perform between 10 and 15 preliminary trials before each series.
A V8i VICON eight-camera (Mcam2) motion capture system with 64 analogue channels (Oxford Metrics Ltd., UK) was used to record upper limb movement (see below). The experimental device also included a force platform (AMTI OR600x1200 mm, USA) that was firmly affixed to the floor of the laboratory. Lastly, a monoaxial accelerometer (ENTRAN EGCS ±10 g, StrainSense Limited, UK), initially AP oriented, was located on the splint to determine the characteristic pointing movement events: the index off (IO), which was used to determine the end of anticipatory postural adjustments (“APA”), the index contact (IC), the contact with the target and the index stop (IS), which was used to denote the onset of consecutive postural adjustments (“CPA”) (see Fig. 1). Kinematic and force plate data were low-pass filtered using a Butterworth filter with a 15 Hz cutoff frequency. They were collected at a rate of 500 Hz.

Representative R x, \( R_{\text{x}}^{{\prime }} \) and −F x time courses for three pointing velocities. From top to bottom V 60 (60 % V Max), V 80 (80 % V Max) and V 100 (100 % V Max). These tracings correspond to pointing movements performed at three decreasing velocities by the same subject (subject no. 6). They refer to the time interval for the overall kinetic process, that is, from APA onset to the recovery of “static” body balance after the end of CPA. The upper limb movement (during which SPA occur) corresponds to the shaded area on the graph: It starts at t 0 (index off: IO) and lasts till t 6 (index stop: IS). At the very beginning of the kinetic process (that is to say, during APA) R x and \( R_{\text{x}}^{{\prime }} \) display slight positive variations. During the upper limb movement (from t 0 to t 6) the −F x and \( R_{\text{x}}^{{\prime }} \) time courses display a diphasic profile, the upper limb being first accelerated and then decelerated. After the end of upper limb displacement (t 6), the \( R_{\text{x}}^{{\prime }} \) negative polarity (from t 6 to t e) corresponds to CPA. It is noticeable that, if the −F x, \( R_{\text{x}}^{{\prime }} \) and R x profiles remain similar, the peak amplitudes are lower when velocity is slower. The period of each signal was estimated at \( T_{{0.6V_{ \hbox{max} } }} \) = 300 ± 40 ms, \( T_{{0.8V_{ \hbox{max} } }} \) = 260 ± 33 ms, \( T_{{V_{ \hbox{max} } }} \) = 210 ± 17 ms. R x: antero-posterior component of the reaction forces (N), with \( R_{\text{x}} = R_{\text{x}}^{\prime } + F_{\text{x}} \). F x: quantity of acceleration of the right upper limb (N); −F x is the opposite quantity. \( R_{\text{x}}^{{\prime }} \): quantity of acceleration of the rest of the body (N). t 0: upper limb acceleration onset; t 1 and t 2: instants of the \( R_{\text{x}}^{{\prime }} \) and of the −F x negative peaks; t 3 and t 4: instants of the \( R_{\text{x}}^{{\prime }} \) and of the −F x zero crossings; t 5 and t 6: instants of the index contact (IC) and of the index (and upper limb acceleration) stop (IS); t e: CPA plausible end. APA (close to 0 to t 0), SPA (from t 0 to t 6), CPA (from t 6 to t e): anticipatory, simultaneous, consecutive postural adjustments. B backwards, F forwards
Six reflective skin markers (14 mm in diameter) were used to capture the upper limb movement. They were located according to the plug-in gait marker placement nomenclature: one was placed on the dorsum of the hand just below the head of the second metacarpal; two were placed on the thumb side and little finger side of the wrist bar; one was placed on the lateral epicondyle elbow joint axis; and two were placed on the right and left acromio-clavicular joints. Additional markers were placed on the trunk, but they were not considered in this study.
The motion capture system measured the shoulder, elbow and possibly wrist angular movements in relation to the shoulder, elbow and wrist rotation centers, that is to say, the right acromio-clavicular joint, the lateral epicondyle elbow joint and the middle of the thumb and little finger sides of the wrist bar. They were considered in the shoulder parasagittal plane. The length and the COG location of each of the upper limb links (upper arm, lower arm and hand) were estimated from individual body heights, and the related masses were estimated from individual body weights (Zatsiorsky et al. 1990).
The resulting upper limb COG (G x) kinematics (displacement, velocity and acceleration) and kinetics along the antero-posterior axis were calculated in relation to the shoulder rotation center, using MATLAB™ software (R2009b, The MathWorks Inc., USA). Peak velocity (V) was systematically measured. Moreover, the kinematic data were used to calculate the upper limb quantities of acceleration (F x = m 2 a(G2x), with m 2 being the upper limb mass, and a(G2x), the acceleration of its center of gravity, G2x). The force platform on which the stool was located was used to measure the antero-posterior (AP) component (R x) of the reaction forces. As is already known, R x represents COG acceleration along the AP axis, to within the subject’s mass (R x = m a(G x), with m being the mass of the body and a(G x) the acceleration of the body center of gravity, G x). Major kinetic events (see Fig. 1) were defined using the time coincidence method (Bouisset and Zattara 1981). APA duration (dAPA) was measured as lasting from R x to the onset of wrist acceleration. SPA duration was measured as lasting from IO to IS. In addition, the 2-DOF model already described (Fourcade et al. 2014) was used. It allowed a distinction to be made between the right upper limb that was mobilized to perform the pointing movement, and the rest of the body, mainly the trunk and lower limbs. More precisely, the quantity of acceleration of the upper limb (F x) was calculated from kinematic data and that of the rest of the body (\( R_{\text{x}}^{{\prime }} \)) from kinetic data (\( R_{\text{x}} = R_{\text{x}}^{\prime } + F_{\text{x}} \), according to the model). Therefore, \( R_{\text{x}}^{{\prime }} \) = m 1 a(G1x), with m1 being the mass of the rest of the body and a(G1x) the acceleration of its center of gravity, G1x. Finally, −F x (the opposite of F x) and \( R_{\text{x}}^{{\prime }} \) were considered, because one is a measurement of the resultant action on the shoulder (AoSh) and the other the resultant reaction of the shoulder (RoSh). The ellipse that best matches these experimental data was calculated using the Lissajous ellipse method. In order to calculate the direct least squares fit, a MATLAB code using the method put forward by Fitzgibbon et al. (1999) was written. This method has already been published by Fourcade et al. (2014). It allowed accurate comparisons to be made between \( R_{\text{x}}^{{\prime }} \) and −F x instantaneous values during upper limb displacement, in order to calculate the mean time lag (τ) between the \( R_{\text{x}}^{{\prime }} \) and −F x time course, and the ellipse eccentricity (e = \( \frac{{\sqrt {a^{2} - b^{2} } }}{a} \), with a and b being half of its major and minor axes).
For each subject, the five fastest trials of series #1 were kept as a reference, in order to define the maximal task–movement characteristics. Moreover, nine trials of series #2 were considered, provided that these submaximal movements, like the maximal ones, were performed in a continuous way. The three maximal ones are termed in Table 1 “fast,” the three slowest ones, “slow” and the three in between, “mid.”
An ANOVA was used for testing significant differences in the data, and linear correlations (Bravais–Pearson’s r) were calculated. The threshold for significance was set at 0.05 (p ≤ 0.05: significant *).
Mean values and standard deviations were calculated for each variable in the experimental conditions. To test the influence of velocity, a “three-velocity” (slow, mid and fast) ANOVA with repeated measures was used on each experimental variable. Linear correlations (Bravais–Pearson’s r) were also calculated. The threshold for significance was set at 0.05 (p ≤ 0.05: significant *).
Results
The focus of our research is on the influence of movement velocity on SPA main features. It includes qualitative and quantitative data.
Qualitative analysis of the kinetic process
Scanning of time course profiles (Fig. 1) shows that variations in kinetic quantities (−F x, \( R_{\text{x}}^{{\prime }} \) and R x) are similar for the three different movement velocities (V 60, V 80 and V 100).
The upper limb movement that started at t 0, marking the end of the APA, lasted till t 6, that is to say, from IO to IS. During this movement time interval (which is necessarily also the SPA time interval), the −F x and \( R_{\text{x}}^{{\prime }} \) time courses displayed a diphasic profile: the upper limb first accelerated and then decelerated (as F x, the opposite of −F x, is the upper limb acceleration, to within the upper limb’s mass) (see above). \( R_{\text{x}}^{{\prime }} \) displays a negative polarity during the first phase and a positive polarity during the second phase. After the end of upper limb displacement (t 6), the \( R_{\text{x}}^{{\prime }} \) negative polarity includes CPA (from t 6 to t e). It is noticeable that, if the −F x, \( R_{\text{x}}^{{\prime }} \) and R x profiles stay similar when the velocity is different, the peak amplitudes are lower when the velocity is slower. More generally, the comparison between the −F x and \( R_{\text{x}}^{{\prime }} \) time courses (Fig. 1) shows that, even if they are parallel, they are shifted: \( R_{\text{x}}^{{\prime }} \) tends to be in advance of −F x for all the movement velocities.
In addition, the sinusoidal \( R_{\text{x}}^{{\prime }} \) and −F x time variations suggested the plotting of one against the other. The ellipse that best matches these experimental data was calculated. Figure 2 shows that a Lissajous ellipse fits the submaximal movements, as was the case for the maximal ones (Fourcade et al. 2014). The influence of velocity on Lissajous ellipses is clearly apparent. It includes greater \( R_{\text{x}}^{{\prime }} \) and −F x amplitudes and greater ellipse eccentricities. More generally, Fig. 2 suggests a continuous transformation of a Lissajous ellipse as a function of pointing velocity, which includes a dilatation along the major and minor ellipse axes. It can be also noted that the \( R_{\text{x}}^{{\prime }} \) and −F x signs were negative from t 0 to t 3, and positive, from t 4 to t 6; however, the opposite was found between t 3 and t 4. With regard to this criterion, SPA duration can be divided into three successive parts: early (eSPA), mid (mSPA) and late (lSPA), with mSPA appearing as a transition between eSPA and lSPA.

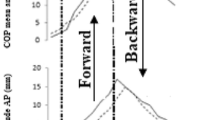
Lissajous ellipses for three pointing velocities. The ellipses correspond to the same pointing movements performed by the same subject as in Fig. 1 (no. 6), at three different velocities: V 60 (60 % V Max), V 80 (80 % V Max) and V 100 (100 % V Max). They allow a comparison of the best mean ellipse (solid line) with one of the corresponding experimental ellipses (dashed lines), as it is exemplified for V 100. The SPA lasts from t 0 till t 6. It can be noted that \( R_{\text{x}}^{{\prime }} \) and −F x are oriented differently according to the ellipse quadrant, the −F x amplitude being first greater (up to t 3) and then (from t 3 to t 6) lesser than that of \( R_{\text{x}}^{{\prime }} \). Moreover, the \( R_{\text{x}}^{{\prime }} \) and −F x signs were opposite for part of the SPA duration (between t 3 and t 4), but they displayed the same sign during the resting SPA: they were both negative from t 0 to t 3, and positive, from t 4 to t 6. I, II, III and IV refer to ellipse quadrants; t 0,…,t e: same symbols as in Fig. 1. \( R_{\text{x}}^{{\prime }} \) (N) and −F x (N) axes are orientated from backwards (−) to forwards (+)
Quantitative variations of kinetic quantities in relation to velocity
Quantitative figures were calculated in order to state more precisely the influence of movement velocity on SPA. They amounted to a wide range of pointing movement velocities, from V min = 1.16 ± 0.35 m/s to V max = 2.75 ± 0.26 m/s. It was shown that velocity had a clear influence on SPA durations and amplitudes. Indeed, the SPA overall duration (dSPA), as well as the duration for the part SPA (deSPA, dmSPA and dlSPA), decreased from the slower to the faster velocities (Table 1), and the correlations between these durations and the movement velocity (V) were significant (r = .82*; r = .51*; r = .60*; r = .82*). In addition, the SPA peak amplitudes (|p − \( R_{\text{x}}^{{\prime }} \)| and p + \( R_{\text{x}}^{{\prime }} \)) increased significantly from the slower to the faster velocities (Table 1), and the correlations were significantly positive (Fig. 3b, d). However, during the negative SPA time course, |p − (−F x)| > |p − \( R_{\text{x}}^{{\prime }} \)|: The absolute value of (−F x) negative peak amplitude (|p − (−F x)|) was greater than the absolute value of \( R_{\text{x}}^{{\prime }} \) negative peak amplitude (|p − \( R_{\text{x}}^{{\prime }} \)|). The opposite was found during the positive SPA time course: p + \( R_{\text{x}}^{{\prime }} \) > p + (−F x). In addition, |p − (−F x)| was not significantly (N.S.) different from |p + (−F x)| between the three velocities: F(1,8) = 3.20 (N.S), for the slow velocity; F(1,8) = 0.90 (N.S.), for the mid one; F(1,8) = 4.21 (N.S), for the fast one. On the contrary, |p − \( R_{\text{x}}^{{\prime }} \)| and p + \( R_{\text{x}}^{{\prime }} \) increased significantly: [F(1,8) = 18.54*; F(1,8) = 37.12*; F(1,8) = 55.03*]. Lastly, the time lag (τ) between the \( R_{\text{x}}^{{\prime }} \) and −F x time courses decreased significantly, from the slower to the faster velocity, and a significant negative correlation with velocity was found (Fig. 3g): The shorter the time lag, the faster the movement velocity. In other words, velocity was faster when the phasing between R x and −F x was enhanced. Moreover, greater ellipse eccentricities (e) proceeded from greater velocities (Fig. 3h).

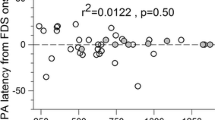
Main linear correlations between kinetic characteristics and movement velocity (V). The correlations result from the matching of individual data (27 values per subject). For each of the nine subjects, the individual data resulting from the nine trials were distributed into three groups, each one including three trials, that is, the three slowest, the three fastest and the three mid-range. The corresponding means were calculated for the peak velocity of the upper limb (termed “velocity”: V) and related kinetic characteristics. It can be noted that all the correlations were significant, the durations decreasing in relation to velocity, as well as the time lags, while the peak forces increased. V: peak velocity of the upper limb; |p − \( R_{\text{x}}^{{\prime }} \)| and p + \( R_{\text{x}}^{{\prime }} \): SPA peak amplitudes (negative and positive \( R_{\text{x}}^{{\prime }} \) phases); |p − (−F x)| and p + (−F x): −F x peak amplitudes (negative and positive −F x phases); dAPA: APA duration; dSPA: SPA duration; τ: mean time lag between the \( R_{\text{x}}^{{\prime }} \) and −F x time courses; e: ellipse eccentricity. r: Bravais–Pearson’s coefficient (p ≤ 0.05: significant *)
Discussion
This study has focused on SPA that last from t 0 to t 6 (the shaded areas in Fig. 1), that is to say, the adjustments that occur during the upper limb movement associated with the performance of an index finger pointing task at various velocities. It is mainly based on original findings on \( R_{\text{x}}^{{\prime }} \) and a comparison between \( R_{\text{x}}^{{\prime }} \) (the resultant reaction of the shoulder: RoSh) and −F x (the resultant action on the shoulder: AoSh). One is an expression of “postural” kinetics, while the other represents “focal” kinetics. Two main results have emerged from this research: (1) RoSh is in phase advance of AoSh, the time lag (τ) being all the shorter as the focal movement velocity becomes faster and (2) RoSh and AoSh display similar diphasic profiles whose amplitude and duration vary with movement velocity. These results enable us to examine three questions in greater depth.
-
1.
Is the postural chain programmed according to the focal chain velocity?
When studying postural programming, anticipatory postural adjustments (APAs) were shown to be a valuable tool. Indeed, different task parameters have already been identified in this way, such as velocity, load, direction, and orientation in space (for a review, see Bouisset and Do 2008). The APA argumentation can be used in the current study. More specifically, the APA duration (dAPA) increases in relation to the velocity (V) of the forthcoming focal movement (Table 1; Fig. 3e). Since by definition, APAs precede the onset of a movement, they cannot result from the re-afferentation this onset triggers: In other words, APAs are “pre-programmed.” Consequently, as APAs occur in the postural chain, it can be assumed that the postural chain is programmed. Moreover, APAs were found to vary in relation to the velocity of the forthcoming movement, in accordance with previous data on shoulder flexion (Bouisset et al. 2000). Therefore, it can be assumed that the postural chain is programmed as a function of pointing velocity, if it is considered that the postural component is a continuous process in which SPA and APA are successive parts.
The 2-D model used makes it possible to evaluate the instantaneous postural and focal kinetics. Thus, there is the potential for deeper insight, because it is possible to check the evidence based on the APA approach, making direct use of the SPA kinetics. Indeed, during the SPA time course, the RoSh and AoSh profiles do not change when velocity varies (Fig. 1). However, the \( R_{\text{x}}^{{\prime }} \) quantitative parameters (dSPA, deSPA, dmSPA, dlSPA, |p − \( R_{\text{x}}^{{\prime }} \)| and p + \( R_{\text{x}}^{{\prime }} \)), and, more generally, the main postural kinetics characteristics do vary as a linear function of movement velocity (Table 1; Fig. 3); in particular, RoSh and AoSh display linear increases. At the end, the postural kinetics appear to vary continuously according to the required task velocity. Moreover, RoSh precedes AoSh for the different movement velocities. Therefore, using the same reasoning as above, as RoSh precedes AoSh, SPA cannot be triggered by the focal movement. Moreover, the time lag (τ) between the postural and the focal kinetics varies as a function of velocity. Finally, it can be assumed that the postural chain kinetics is programmed as a function of velocity. In accordance with Latash (1993), programming can be based on an internal simulation of the forthcoming mechanical perturbation, induced by the focal movement the subject intends to perform.
Finally, the present evidence strengthens the hypothesis that postural adjustments occurring during upper limb movement (SPA) are programmed in relation to the focal movement velocity. Moreover, it seems possible to assume that postural kinetics that includes APA, SPA and CPA are the necessary and univocal consequence of motor programming.
-
2.
Focal and postural requirements in order to recover “static” body balance at the task–movement ending.
Several clinicians, including Babinski (1899) and André-Thomas (1940), have considered voluntary movement as a perturbation; indeed, their ideas can be seen in the first experimental research on APA (Belenkii et al. 1967). In other words, it has been claimed that APA represents a proactive counter-perturbation that could contribute to dynamic stability (Bouisset and Zattara 1981). This hypothesis was strengthened by an analysis of forces acting at the shoulder level and at the body’s center of gravity.
Fourcade et al. (2014) considered pointing tasks performed at maximal velocity, postulating that RoSh is strictly a counter-perturbation when the RoSh sign is opposite to the AoSh one. They showed that a counter-perturbation occurs only partly during the SPA time course (mSPA). However, the SPA role can also be considered from a more general viewpoint, that is to say, from the kinetic action required during the motor act. Thus, it is helpful to take into account not only the task parameters (e.g., velocity and amplitude), but also the related biomechanical “local” (related to upper limb kinetics) and “global” (related to body kinetics) requirements.
In the current study, the upper limb must be moved between an initial and a final resting position, that is to say, an initial and a final “static” state that implies no upper limb kinetics (or kinematics, as upper limb acceleration and velocity must also be nil). Therefore, positive and negative quantities of acceleration must be equal, and a biphasic kinetic pattern can be expected if the task is performed in a continuous way. Such a pattern is actually observed in Fig. 1 (to within the sign, as F x is the opposite to −F x), in accordance with classical data, such as Bouisset and Lestienne (1974) and Hogan (1984) studies. In other words, an upper limb acceleration phase is followed by an upper limb deceleration phase during upper limb displacement (“primary movement”). Moreover, as upper limb movement perturbs body balance, the same reasoning can be applied to the body: A body acceleration phase must be followed by a body deceleration phase in order to recover “static” whole body balance at the end of the motor act. This is clearly the reason why R x also displays a diphasic profile, and \( R_{\text{x}}^{{\prime }} \) (\( R_{\text{x}}^{\prime } = R_{\text{x}} {-}F_{\text{x}} \): see “Materials and methods”), a triphasic one, as R x is not in phase with −F x (Fig. 1). However, as the current study is focused on postural adjustments that occur during the course of the pointing movement (SPA), it is only necessary to focus on the SPA kinetic process in terms of the upper limb acceleration and deceleration phases; that is to say, refer to the local requirements. In other words, the early SPA (eSPA: from t 0 to t 3) corresponds to the movement acceleration phase, the late SPA (lSPA: from t 4 to t 6) to the braking phase and the middle SPA (mSPA: from t 3 to t 4) to the transition between the two.
-
3.
Is the postural chain only a postural stabilizer?
First, during the early and mid SPA (from t 0 to t 4), the task implies that an upper limb forward acceleration occurs at the focal movement onset: F x, the upper limb acceleration (to within the upper limb mass), must be positive, and consequently, AoSh must be negative (as −F x is opposite F x). During the same time interval, \( R_{\text{x}}^{{\prime }} \), which displays the same time course as −F x, was also found to be negative. Thus, SPA contributes to upper limb acceleration. This finding is not surprising, because the positive acceleration and forward displacement of the shoulder that occurs at the onset of pointing has already been reported by Lino (1995) and by Ma and Feldman (1995) among others. Moreover, AoSh is greater than RoSh, while both increase significantly with respect to velocity (Fig. 3a–d). In other words, during the upper limb acceleration phase, even if AoSh is prevailing on RoSh, RoSh contributes clearly to upper limb acceleration; that is to say, it contributes to propulsive action (except during the mid SPA where RoSh is opposite AoSh). However, RoSh kinetics cannot be considered a passive consequence of AoSh kinetics, as RoSh is in phase advance of AoSh. Furthermore, as previously reported, EMG activities in the trunk and lower limbs precede those of the prime mover (Lino 1995; Teyssèdre et al. 2000).
Second, during the late SPA (lSPA), from t 4 to t 6, the upper limb acceleration F x must be negative (and consequently −F x, that is to say, AoSh, must be positive), in order to stop upper limb displacement. During this deceleration phase, RoSh is greater than AoSh when velocity increases (Table 1), even if they are both increasing significantly (Fig. 3a–d): RoSh plays a major role during this phase. Clearly, RoSh contributes to upper limb deceleration. However, the amplitude of RoSh is greater than that for AoSh. This result can be attributed to the necessity to compensate for the perturbation applied by the upper limb to body balance and to favor the body final “static” position at the end of CPA. Here again, RoSh could not be a passive consequence of AoSh, as it is in phase advance of it, and because it fits with the anticipatory postural EMGs reported above.
Furthermore, as previously reported, EMG activities in the trunk and lower limbs preceded those of the prime mover (Lino 1995; Teyssèdre et al. 2000). In addition, the postural muscles’ activation pattern was specific to either the acceleration or deceleration phase in this pointing task, as was the case in other upper limb movements, such as shoulder flexion (see Zattara and Bouisset 1988). The role of trunk muscles during upper limb movements in stance was recently extensively re-evaluated by Eriksson Crommert et al. (2015) and Stamenkovic and Stapley (2016).
To conclude, the present data support the hypothesis that motor command includes two distinct components (i.e., a focal and a postural component), which are programmed according to movement velocity [see Massion (1992) for a review]. They suggest that the postural chain is intimately complementary to the focal chain, thus making the task more efficient, and that SPA characteristics are task-specific. Consequently, they would present differences between healthy subjects, and individuals with motor impairments, such as those with Parkinson’s disease (Traub et al. 1980; Bazalgette et al. 1986) and hemiparesis (Archambault et al. 1999). Therefore, the method used to identify the postural and focal components within the same movement may serve as a useful tool for identifying difficulties in motor planning, programming and movement execution.
References
André-Thomas (1940) Équilibre et équilibration. Masson, Paris 567 p
Archambault P, Pigeon P, Feldman AG, Levin MF (1999) Recruitment and sequencing of different degrees of freedom during pointing movements involving the trunk in healthy and hemiparetic subjects. Exp Brain Res 126:55–67
Babinski J (1899) De l’asynergie cérebelleuse. Rev Neurol 7:806–816
Bazalgette D, Zattara M, Bathien N, Bouisset S, Rondot P (1986) Postural adjustments associated with rapid voluntary arm movements in patients with Parkinson’s disease. Adv Neurol 45:371–374
Belenkii YY, Gurfinkel VS, Paltsev YI (1967) Element of control of voluntary movements. Biofizika 12:135–141
Bouisset S, Do MC (2008) Posture, dynamic stability, and voluntary movement. Neurophysiol Clin 38:345–362
Bouisset S, Lestienne F (1974) The organisation of a simple voluntary movement as analysed from its kinematic properties. Brain Res 71:451–457
Bouisset S, Zattara M (1981) A sequence of postural movements precedes voluntary movement. Neurosci Lett 22:263–270
Bouisset S, Richardson J, Zattara M (2000) Do anticipatory postural adjustments occurring in different segments of the postural chain follow the same organisational rule for different task-movement velocities, independently of the inertial load value? Exp Brain Res 132:79–86
Brenière Y, Do MC, Bouisset S (1987) Are dynamic phenomena prior to stepping essential to walking? J Mot Behav 19:62–76
Eriksson Crommert M, Halvorsen K, Ekblom MM (2015) Trunk muscle activation at the initiation and braking of bilateral shoulder flexion movements of different amplitudes. PLoS One 10(11):1–16
Fitzgibbon AW, Pilu M, Fisher RB (1999) Direct least squares fitting of ellipses. IEEE Trans Pattern Anal 21:476–480
Fourcade P, Hansen C, LeBozec S, Bouisset S (2014) Simultaneous postural adjustments (SPA) scrutinized using the Lissajous method. J Biomech 47:3645–3649
Gelfand IM, Gurfinkel VS, Tsetlin ML, Shik ML (1966) Some problems of investigation of movements. In: Gelfand IM, Gurfinkel VS, Fomin VS, Tsetlin ML (eds) Models of the structural–functional organization of certain biological systems. Nauka, Moscow, pp 264–276 (in Russian)
Hogan N (1984) An organizing principle for a class of voluntary movements. J Neurosci 11:2745–2754
Latash ML (1993) Control of human movement. Human Kinetics, Champaign
Lino F (1995) Analyse biomécanique des effets de modifications des conditions d’appui sur l’organisation d’une tâche de pointage exécutée en posture assise. PhD thesis, Paris-Sud University, Orsay, France
Ma S, Feldman AG (1995) Two functionally different synergies during arm reaching movements involving the trunk. J Neurophysiol 73:2120–2122
Massion J (1992) Movement, posture and equilibrium: interaction and coordination. Progr Neurobiol 35:35–56
Patla AE, Ishac MG, Winter DA (2002) Anticipatory control of center of mass and joint stability during voluntary arm movement from a standing posture: interplay between active and passive control. Exp Brain Res 143:318–327
Richardson J, Bouisset S, Hansen C, Ribreau C (2012) A simple method to compare body and upper limb kinetics in the course of a pointing task. Comput Methods Biomech Biomed Eng 15:371–373
Stamenkovic A, Stapley PJ (2016) Trunk muscles contribute as functional groups to directionality of reaching during stance. Exp Brain Res 234(4):1119–1132
Teyssèdre C, Lino F, Zattara M, Bouisset S (2000) Anticipatory EMG patterns associated with preferred and non-preferred arm pointing movements. Exp Brain Res 134:435–440
Traub MM, Rothwell JC, Marsden CD (1980) Anticipatory postural reflexes in Parkinson’s disease and other akinetic-rigid syndromes and in cerebellar ataxia. Brain 103:393–412
Triolo RJ, Werner KN, Kirsch RF (2001) Modeling the postural disturbances caused by upper extremity movements. IEEE Trans Neural Syst Rehabil Eng 9:137–144
Zatsiorsky VM, Seluyanov VN, Chugunova LG (1990) Contemporary problems of biomechanics. In: Chernyi GG, Regirer SA (eds) Methods of determining mass–inertial characteristics of human body segments. CRC Press, USA, pp 272–291
Zattara M, Bouisset S (1988) Posturo-kinetic organisation during the early phase of voluntary upper limb movement. 1. Normal subjects. J Neurol Neurosurg Psychiatr 51:956–965
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
None declared.
Rights and permissions
About this article

Cite this article
Fourcade, P., Le Bozec, S. & Bouisset, S. Are simultaneous postural adjustments (SPA) programmed as a function of pointing velocity?. Exp Brain Res 234, 2809–2817 (2016). https://doi.org/10.1007/s00221-016-4683-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-016-4683-8