
Abstract
Walking as a means to interact with the environment has a twofold goal: body displacement (intermediate goal) and the future action on the environment (final representational goal). This involves different processes that plan, program, and control goal-directed locomotion linked to motivation as an “emotional state,” which leads to achieving this twofold goal. The aim of the present study was to determine whether emotional valence associated with the final representational goal influences these processes or whether they depend more on the emotional valence associated with the intermediate goal in young adults. Twenty subjects, aged 18–35 years, were instructed to erase an emotional picture that appeared on a wall as soon as they saw it. They had to press a stop button located 5 m in front of them with their right hand. Their gait was analyzed using a force platform and the Vicon system. The main results suggest that the emotional valence of the intermediate goal has the greatest effect on the processes that organize and modulate goal-directed locomotion. A positive valence facilitates cognitive processes involved in the temporal organization of locomotion. A negative valence disturbs the cognitive processes involved in the spatial organization of the locomotion and online motor control, leading to a deviating trajectory and a final body position that is more distant from the stop button. These results are discussed in line with the motivational direction hypothesis and with the affective meaning of the intended response goal.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
During daily activities, most motor actions are aimed at interacting with the environment and usually results in a reward value (Haggard 2005). In this context, a voluntary movement, compared with reflexes or automatisms, represents the highest level of interaction with the environment and is linked to the highest reward level. A voluntary movement can be defined as a movement that addresses the motivation to achieve a goal-oriented task in a specific context (Massion 1997). Motivation is responsible for the initiation, maintenance, and cessation of an intended behavior. It is also responsible for the appetitive or aversive valence conferred on the goal of the action and/or elements of the environment on which this behavior is exerted (Coquery 1991). In this way, an emotion prioritizes certain goals, mobilizes energy, and directs behavior. Therefore, emotions can be considered as the primary motivational system for goal-directed behavior (Bagozzi et al. 2000; Frijda 1986, 2006; Pfister and Böhm 2008; Zeelenberg et al. 2008; Zeelenberg and Pieters 2006, 2007).
The influence of emotions on motor actions is increasingly explored in the study of human behavior. The recent work of Ambron and Foroni (2014) tested whether task-irrelevant faces with or without emotional expressions would influence the trajectories of simple reaching movements. The results showed that emotions (in particular happiness) capture attention and interfere with ongoing goal-directed actions. In this way, locomotion is particularly interesting because locomotion is not a simple mode of travel. Locomotion is a goal-directed motor behavior that involves organizing the whole body to orient its trajectory in order to interact with the environment, either to reach a precise point in space or to avoid it. Some studies have analyzed the effect of emotional pictures on the processes that organize gait initiation and locomotion. However, the effect of the emotional valence associated with the final goal of this action on these processes and its influence on the whole body trajectory remains poorly studied. The aim of the present paper was to investigate this effect on the processes that organize goal-directed locomotion in young adults, taking into account the whole body trajectory.
Locomotion: an automatic link between the perception of valence and approach–avoidance behavior
Emotions are driven by two motivational systems (appetitive and aversive), which prototypically express the primitive behavioral tendencies of approach and avoidance, respectively (Elliot and Thrash 2002; Lane et al. 1997; Lang et al. 1997). However, theoretical developments regarding emotional processes suggest a clear distinction between the concepts of approach–avoidance and emotional valence (i.e., appetitive/pleasant or aversive/unpleasant). For example, recent studies reviewed by Carver and Harmon-Jones (2009) suggested that anger can be classified as a negative emotional state and also as an approach state. Nevertheless, other studies suggest that when emotion is examined with a dimensional affective scale—without considering discrete emotions such as anger—approach and avoidance are strongly linked to valence (Elliot and Thrash 2010; Gable et al. 2003). Another method for examining the links between motivational direction and valence is studying motor behaviors, which is particularly relevant to the research presented here. Even if some studies distinguished behavioral tendencies of approach–avoidance and valence of externally or self-generated and evoked emotional stimuli (Fawver et al. 2015, 2014), others have shown that when affective cues without emotional content are used, there are strong connections between them (Cacioppo et al. 1993; Centerbar and Clore 2006; Dru and Cretenet 2011; Eder and Rothermund 2008; Krieglmeyer et al. 2010; Neumann et al. 2014; Zhang et al. 2012). Therefore, one way to examine the possible links between emotion and movement would be to consider valence in a strict dimensional view, avoiding any discrete emotional content associated with this dimension.
Based on this, several studies have analyzed the effect of emotions on gait initiation and locomotion in healthy adults. Research on the initiation of a gait or walk toward pleasant or unpleasant pictures has revealed that unpleasant images cause an initial “freezing” response and a tendency to move away from the stimuli (Ly et al. 2014; Stins and Beek 2011). Unpleasant images cause an increased reaction time (i.e., a delay between when the picture is first seen and the initiation of dynamic phenomena on the anteroposterior axis) and a decreased amplitude of the early postural component associated with gait initiation, without modifying the length of the first step (Gelat et al. 2011). Naugle et al. (2010, 2011) revealed that locomotion is facilitated when walking toward approach-oriented emotional stimuli and compromised when walking toward aversive emotional stimuli; however, highly arousing unpleasant emotional states accelerated the initial motor response.
This automatic link between perception of valence and approach–avoidance behavior can also be observed when locomotion is performed by a manikin that is “piloted” by the subjects (Krieglmeyer et al. 2010, 2011). In this study, the authors tested whether stimulus valence facilitates behavior that ultimately causes a compatible change in distance, even when this behavior first causes an incompatible change in distance. The participants were asked to move a manikin on a computer screen toward or away from a positive or negative word. In half of the trials, moving the manikin in one direction ultimately required an initial movement in the opposite direction. The results showed that stimulus valence facilitated only ultimate-compatible distance change in terms of reaction time, regardless of the initial direction.
Although most of these studies took into account the congruent versus incongruent aspect of each task,Footnote 1 the emotional valence of the goal of the locomotion remains unclear. Indeed, initiation of a gait or walk toward a picture only reflects the order to walk toward it, with no indication of the emotional load. It is fundamentally different from goal-directed locomotion, which depends on the motivation at the origin of the movement. Indeed, Stins et al. (2011) reported that participants needed more time to initiate a forward step toward an angry face than toward a smiling face, because approaching a friendly face could have invited physical contact and facilitated socially guided behavior, while approaching an angry face could potentially expose the subject to physical or verbal abuse. This motivation is derived from the positive or negative emotional valence associated with the goal of the action; the approach–avoidance motivation governs the construction of the goal behavior (Elliot 2006). Numerous studies have shown that the impact of affective stimuli on responses is influenced by the agent’s current intentions and action goals (Bamford and Ward 2008; Eder and Rothermund 2008; van Dantzig et al. 2008).
Intentions, action goals, and emotions
According to the theory of event coding and the intentional-feature-weighting hypothesis proposed by Hommel et al. (Haazebroek et al. 2013; Hommel et al. 2001; Memelink and Hommel 2013), perception, action, and cognition are tightly intertwined and share common representations and processes. Although the mental representation of an action contains both instructed and non-instructed features, the action is primarily accessed by codes that represent the instructed response goal. Response features that are crucial for accomplishing the task goal (i.e., intention- or goal-related feature dimensions) are weighted more strongly for action coding than features that are less central for solving the task at hand. Moreover, Eder and colleagues found that mental representations of approach and avoidance go along with evaluative coding of these behaviors that match or mismatch the valence of the stimuli. Therefore, the affective coding of a response is sensitive to the motivational implications of the produced effect. For example, coupling a keypress with positive or negative consequences produces affective compatibility effects when the keypress has to be executed in response to positive or negative stimulus categories. When participants are instructed to turn affective words ON (i.e., increase the visual contrast between the word and the background color of the computer screen) and OFF (i.e., decrease the contrast) with left and right response keys, respectively, the positive words were evaluated faster with a keypress that turned the words ON (vs. OFF), whereas negative words were evaluated faster with a keypress that turned the words OFF (vs. ON) (Eder and Klauer 2009; Eder and Rothermund 2008; Eder et al. 2013).
Together, these data suggest that specific motor codes are necessary to perform the instructed response and are primarily accessed through the mental representation of the instructed response, which is a goal linked to the emotions that it elicits.
Although these two points of view complement one another and clearly explain discrete movement (to move a lever, to press a key, etc.), more complexity is introduced when considering the body displacement in space when there is a specific need to interact with the environment. In daily activities, the agent’s intention and/or the goal of the locomotion rarely corresponds to the body motion itself. Locomotion is a means of transport used to interact with the environment. The goal of oriented locomotion is twofold: first, the displacement of the body toward a precise point in space, and second, the aim of the future action on the environment. Achieving the aim of the future action can be considered as a final goal which is representational one. Displacing the body to achieve this final representational goal can be considered an intermediate goal. These two goals must be organized and might also be linked with emotions.
Intermediate and final goals of locomotion during conflicting motivations
What happens when the emotional valences of the intermediate and final goals are opposed? For example, we are sometimes required to walk toward aversive objects, animals, or situations (an unpleasant task) to remove them from our presence (a pleasant outcome). Similarly, we can walk toward an appetitive stimulus (a pleasant task) to remove it (an unpleasant outcome), for example: walking toward the television to turn it off, even if the broadcast was very interesting. In these two cases, the emotional valence conferred on the intermediate and final goals creates both a congruent and incongruent aspect of the locomotion that could evoke conflicting motivations. This could cause inconsistencies between the intermediate and final goals regarding the processes involved in locomotion organization and modulation. Thus, the aim of the present study was to determine whether the emotional valence associated with the final representational goal influences the processes that organize and modulate body displacement, or whether this organization depends more on the emotional valence associated with the intermediate goal. The task comprised walking toward a stop button (intermediate goal) to erase emotional pictures (final goal). Conflicting motivations between the intermediate and final goals (opposed emotional valence of each goal) were used to clearly dissociate the repercussions of the emotional valence associated with each of these goals on the processes organizing and modulating locomotion.
Two hypotheses were tested in agreement with the affective meaning of the intended response goal (Eder and Klauer 2009; Eder and Rothermund 2008; Eder et al. 2013) and the motivational direction hypothesis (Cacioppo et al. 1993; Chen and Bargh 1999; Duckworth et al. 2002; Gelat et al. 2011). The first hypothesis explained that the emotional valence associated with the final representational goal has the greatest effect on the processes that organize the locomotion. In this case, a pleasant final goal (instructed) that creates a congruent situation (task: erase unpleasant pictures) would facilitate an approach behavior. Conversely, an unpleasant final goal that creates an incongruent situation (task: erase pleasant pictures) would disturb it. Alternatively, the emotional valence of the intermediate goal (uninstructed) could have the greatest effect on these processes. In this case, a pleasant intermediate goal that creates a congruent situation (task: walking toward a pleasant picture) would facilitate an approach behavior, while an unpleasant one creating an incongruent situation (task: walking toward an unpleasant picture) would disturb it.
Materials and methods
This research took place entirely in Laboratory 2931, “Research Centre on Sports and Movements” at the University Paris Ouest Nanterre La Défense. It was covered by BIOMEDIC® insurance and approved by the local ethics committee (Comité de Protection des Personnes, Paris VI).
Participants
Twenty young adults voluntarily participated in this study: 10 males and 10 females, aged 18–35 years (male average age: 27 years ± 4; female average age: 24 years ± 2). All of the participants provided signed, informed consent and were right-handed. They presented normal or corrected vision and did not have balance, neurological, or emotional disorders.
Materials and procedure
Locomotion analyses were performed using a force plate AMTI® (120 × 60 cm) and an automatic motion analyzer (VICON® system), which employed seven cameras and a sampling frequency of 200 Hz. All signals from the force platform were recorded at 1000 Hz and were filtered through a 10-Hz low-pass, fourth-order, zero-lag Butterworth filter. The coordinates for the center of foot pressure (CP) in the anteroposterior (xCP) directions were calculated from the ground reaction forces and moments. The participants, barefoot and in their underwear, were fit with 23 spherical retroreflective markers (14 mm in diameter) taped in pairs on their back as follows: head (markers 1, 2, and 3), vertebrae C7, D7, D12, and L5 (markers 4, 5, 6, and 7, respectively), acromion (markers 8 and 9), elbows (markers 10 and 11), iliac spine (markers 12 and 13), trochanters (markers 14 and 15), tibial plates (markers 16 and 17), heels (markers 18 and 19), external malleoli (markers 20 and 21), and fifth metatarsal joints (markers 22 and 23). One additional marker was placed at the top of the button (Fig. 1a).

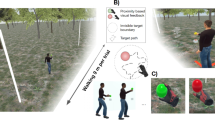
a Body reconstruction from the marker locations on the body. b The experimental setup. The rectangle represents the force plate, whence participants began their walk toward the stop button (black point) to stop the emotional picture viewing. The dotted X, Y axes in bold type on the force plate and the arrow represent the orientation of the force plate coordinate system with respect to the path of progression
Various pictures were used to induce emotional states during the experimental trials. The stimuli included 45 digitized photographs (15 each of pleasant, unpleasant, and neutral images) selected from the International Affective Picture System (IAPS). Pictures were chosen according to the gender of the participants with respect to the scores of the computerized 9-point version of the Self-Assessment Manikin (SAM) scale that were provided by Lang et al. (2005). In order to minimize a potential effect of the arousal on posture and movement (Bonnet et al. 1995; Horslen and Carpenter 2011), pictures were composed of (a) high arousing pleasant, (b) high arousing unpleasant, and (c) neutral images (see Appendix). Univariate analyses were used to test whether the arousal and valence ratings differed between the subsets of pleasant, neutral, and unpleasant images and therefore to confirm the validity of the image choices. This analysis showed a global effect of the subsets of pleasant, neutral, and unpleasant images on the valence and arousal ratings [F(2,87) = 2059.7, p < 0.001; η 2 p = 0.98, and F(2,87) = 62.9; η 2 p = 0.59, respectively]. Post-tests indicated that valence ratings differed between the three categories (p < 0.001) and that the arousal ratings of the neutral images only differed from both pleasant and unpleasant images (p < 0.001). Pictures (150 × 150 cm) were projected on a wall at random to avoid any learning phenomenon. Picture onset was marked by a 2.16-V signal (a timing pulse that is generated by a pressure sensor placed on the keyboard of the experimenter to trigger the appearance of the picture and to synchronize this time with kinetic and kinematic data; see Fig. 2). To the right of the picture, a stop button was located in front of the subject, placed at shoulder height. The subjects stood on the force plate, which was located 5 m from the wall where the pictures were projected, 15 degrees to their left. As soon as the picture appeared on the wall, the subjects had to walk toward the stop button (intermediate goal) to erase the picture with their right hand (final goal): “You will erase the picture by pressing the button as soon as it appears.” Three situations were tested: (1) The picture was pleasant: The intermediate goal (walking toward the picture) was pleasant and the final goal (erase it) was unpleasant; (2) the picture was unpleasant: The intermediate goal was unpleasant and the final goal was pleasant; and (3) the picture was neutral.

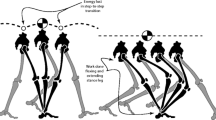
a Trace of one anteroposterior displacement of the center of foot pressure (CP). This one was calculated from ground reaction forces and moments. This signal was filtered with a 10-Hz low-pass, fourth-order, zero-lag Butterworth filter. b The anteroposterior velocity of CP. The reaction time (RT) was measured between the onset of the picture display and the onset of the CP shift (t0). APA duration was measured between t0 and the onset of the heel-off on the vertical axis. APA amplitude corresponded to the maximal amplitude of the first backward CP shift on the anteroposterior axis (xCP: adjusted × displacement, in the direction of the walking path toward the stop button), one trial, one subject, during exposure to a pleasant image
After each trial, the participant had to go back on the force plate, where their footprints had been drawn beforehand with chalk. No instruction was given concerning the speed or the “foot initiation”; subjects initiated locomotion with either their left or right leg, at their discretion.
To achieve a straight line trajectory, the foot position of the subject was directed toward the stop button; therefore, a change in the coordinate system was used for all the force plate calculations (Fig. 1b). Fifteen trials per picture category (pleasant/unpleasant/neutral) were performed (a total of 45 trials). The 45 trials were randomized inside a set to limit any learning and anticipation phenomena.
Coding and preliminary analysis
The processes involved in movement organization were investigated using the following parameters.
Simple reaction time (RT)
RT was calculated as the latency from the beginning of picture viewing to the onset of the dynamic phenomena on the anteroposterior axis (start of the CP shift defined as the time at which 5 % of the first peak of anteroposterior velocity of CP during its backward shift was reached) (Fig. 2). This time is an indicator of the cognitive processes involved in the movement organization.
Mean deviation of the subject’s trajectory
This parameter was quantified using the mean deviation between the real subject trajectory (L5: sacrum segment trajectory) and the straight path (see Fig. 1b). It was calculated using the root-mean-square error (\({\text{RMSE}} = \sqrt {\frac{{\sum {d^{2} } }}{N}}\), where d is the Euclidean distance between the real trajectory and the straight path, and N is the number of points in the trajectory; Ferrel et al. 2001). The results are presented in centimeters and as absolute values. In agreement with Ambron and Foroni (2014), this parameter is an indirect measure of approach and avoidance tendencies. It is also an indirect indicator of the cognitive processes planning locomotion trajectory using abstract representations of the movement trajectory, combined with the online motor control, which monitors and adjusts it online.
Final position of the subject
This corresponded to the distance between the last position of the subject at the end of the locomotion and the stop button on the anteroposterior and lateral axes. The L5 segment position was used to calculate this parameter because the L5 marker (sacrum) better represented the whole body position and was furthest from the button (button marker). This parameter indicated whether a potential deflected trajectory was corrected to adjust the final body position relative to the button, how far from the button the approach behavior was stopped, and lastly whether this position allowed the final goal achievement. It is indirectly linked to the cognitive processes involved in the goal determination, decision making, and trajectory planning that leads to the action combined with the result of online motor control.
According to our first hypothesis, it was our expectation that if the emotional valence of the final goal has the greatest effect on these processes, erasing unpleasant pictures would facilitate an approach behavior because “erase” and “unpleasant picture” are congruent, while erasing pleasant pictures would disturb approach behavior (Eder et al. 2013). In these cases, the RT would be shorter when erasing unpleasant pictures (congruent) than when erasing pleasant ones (incongruent), and the locomotion trajectory as the final body position would be more deflected when erasing pleasant pictures compared with erasing unpleasant ones. By contrast, if the emotional valence of the intermediate goal had the greatest effect, then we would expect to observe a shorter RT when subjects walked toward pleasant pictures (congruent) compared with walking toward unpleasant pictures (incongruent), while the locomotion trajectory and the final body position would deviate further when subjects walked toward unpleasant pictures compared with pleasant pictures.
Anticipatory postural adjustments (APAs)
The amplitude and duration of the APAs were calculated. The role of APAs is to destabilize the erect posture prior to the stepping movement by displacing the center of foot pressure (CP) backward and onto the stepping foot (Brenière et al. 1981). The APA amplitude was determined using the maximal amplitude of the CP displacement on the anteroposterior axis (xCP: adjusted × displacement, in the direction of the walking path toward the stop button). The APA duration corresponded with the period between the beginning of the CP shift and the beginning of the kinematic movement, which was marked by the heel-off on the vertical axis (Fig. 2). These parameters quantify the first dynamic phenomenon linked to the onset of the motor program execution corresponding to gait initiation. Their adaptation to various constraints reflects the involvement of cognitive processes in their organization (Gelat et al. 2011; Yiou et al. 2012).
First stride and launched locomotion parameters
The duration, amplitude, and average velocity of the first stride and third stride (launched locomotion) were calculated. Two consecutive heel-offs of the same foot were taken as a reference for the calculation. For the stride amplitude, a potential movement of the foot according to the lateral axis was taken into account: In time, the positions of the heel marker on the X and Y axes were calculated (\(d = \sqrt {\left( {dx^{2} + dy^{2} } \right)}\), where dx is the amplitude on the x-axis and dy is the amplitude on the y-axis. These parameters were normalized according to the height of the subject. They characterized the automatic aspect of the locomotion and benefit from the online motor control.
We expected that if the emotional valence of the final goal had the greatest effect on the processes involved in movement organization and modulation, then erasing pleasant pictures would create an incongruent situation that would disturb the APAs, first stride, and launched locomotion parameters compared with erasing unpleasant pictures (congruent). By contrast, if the emotional valence of the intermediate goal had the greatest effect, then these parameters would be disturbed when subjects walked toward unpleasant pictures (incongruent) compared with walking toward pleasant pictures (congruent).
Statistical analysis
The Statistica® program was used to make a one-way analysis of variance (ANOVA) with repeated measures on paired samples. According to Cohen (1988), the effect size was specified by the partial eta squared (η 2 p ), and a value >0.14 was considered a large effect. There was one intra-group factor: the emotional valence of the picture, which we termed VALENCE (positive/neutral/negative). When a parameter was significant, the post-test Bonferroni correction was used. For all statistical treatments, the significance level was set at p < 0.05. The results are expressed in terms of averages and standard deviations. In figures: *p < 0.05; **p < 0.01; ***p < 0.001.
Results
RT
RT data from one participant were not included because of a technical problem with the force platform on the day of the recording. The ANOVA of the RT data showed a global VALENCE effect [F(2,36) = 11.57; p < 0.001; η 2 p = 0.39]. The post-test indicated that these effects resulted from a decrease in the RT during projection of the pleasant pictures compared with the neutral (p < 0.01) and unpleasant pictures (p < 0.001; Fig. 3a).

a Mean reaction time(s) according to the emotional valence of the pictures. b Mean deviation between the real subjects’ trajectories (L5: sacrum segment trajectories) and the straight path. c The mean lateral deviation of the final body position (adjusted y position, in the direction of the walking path) from the stop button according to the emotional valence of the pictures. Positive values (mm) indicate a deviation directed to the right. *p < 0.05; **p < 0.01; ***p < 0.001
Mean deviation of the subjects’ trajectories
The ANOVA of the mean deviation between the subjects’ theoretical trajectories and their real trajectory highlighted a global VALENCE effect [F(2,38) = 3.92; p < 0.05; η 2 p = 0.17]. The Bonferroni post-test indicated that the subjects made significantly more deflected trajectories during projection of the negative pictures compared with projection of the positive ones (p < 0.05; Fig. 3b).
Final position of the subject
This parameter was calculated for only 16 subjects because there was an issue with body rotations for four subjects at the end of the locomotion, thereby hiding the L5 markers from the cameras. This result was taken into consideration when calculating the eta squared. The ANOVA only showed a VALENCE effect [F(2,28) = 5.85; p < 0.01; η 2 p = 0.3] in the lateral axis; all subjects stopped to the right of the button (and thus from the picture) when the emotional picture was negative compared with positive (p < 0.01; Fig. 3c).
By contrast, no effect was found on this parameter in the anteroposterior axis; both groups stopped in a similar way regardless of the emotional valence of the pictures.
APA duration and amplitude
The APA data from one participant were not included because of a technical problem with the force platform on the day of the recording. The ANOVA showed a VALENCE effect [F(2,36) = 8.4, p < 0.001; η 2 p = 0.32] on the duration of the APA. The post-test indicated that a pleasant emotional picture led to an increase in this parameter compared with neutral (p < 0.05) and unpleasant pictures (p < 0.001; Table 1). However, there was no effect found for the APA amplitude on the anteroposterior axis.
First stride and launched locomotion parameters
The ANOVA of the first stride and launched locomotion parameters showed no VALENCE effects; these parameters remained the same regardless of the emotional valence of the pictures (Table 1).
Discussion
This study examined the effect of positive and negative emotional valences associated with intermediate versus final representational goals of locomotion and their consequences on the processes involved in locomotion organization and modulation. Two hypotheses were tested. The first was that the emotional valence of the final goal (instructed response) has the greatest effect on the processes that organize locomotion. In this case, the locomotion organization would be primarily accessed through the mental representation of the instructed response, which is a goal linked to the emotions that it elicits (Eder and Klauer 2009; Eder and Rothermund 2008; Eder et al. 2013; Haazebroek et al. 2013; Hommel et al. 2001; Memelink and Hommel 2013). Therefore, erasing unpleasant pictures would facilitate locomotion organization, while erasing pleasant pictures would disturb it. The second hypothesis was that the emotional valence of the intermediate goal has the greatest effect on the processes that organize locomotion. In this case, an automatic link between perception of stimuli valence and approach–avoidance behavior would facilitate locomotion organization during exposure to pleasant pictures and disturb it during exposure to unpleasant ones (Cacioppo et al. 1993; Chen and Bargh 1999; Duckworth et al. 2002; Gelat et al. 2011).
Before discussing the results, it is important to note that regardless of the emotional valence of the two goals, all subjects performed locomotion and erased the pictures. This demonstrates that both locomotion and the future action to erase the pictures (press the stop button) were planned and programmed, and hence, both intermediate and final goals were adopted and pursued by the participants.
Three main conclusions emerged from this study, the first of which concerns the RT. The results showed a reduction in the RT after exposure to the highly arousing pleasant pictures relative to the neutral and unpleasant pictures. Exposure to highly arousing pleasant pictures provides a pleasant intermediate goal and creates a congruent situation when subjects walk toward them. The appetitive circuits are activated (Cacioppo et al. 1993; Chen and Bargh 1999; Duckworth et al. 2002; Lang 1995), and the scope of attention is broadened (see Friedman and Forster 2010; Olofsson et al. 2008 for review; Ambron and Foroni 2014), which speeds up picture scanning and initiation of the motor response (locomotion) relative to all other affective pictures. Therefore, the cognitive processes that organize goal-directed locomotion are facilitated by the positive emotional valence of the intermediate goal; the organization of locomotion would be independent from the emotional valence of the final goal, highlighting a unique and automatic link between the perception of positive valence and approach behavior. Nevertheless, as the RT observed during exposure to unpleasant and neutral pictures was similar, an automatic link between the perception of negative valence and avoidance behavior cannot be demonstrated.
The second result is linked to the body trajectory and final position of the body relative to the stop button. The results of the average variation between the straight line and actual trajectories indicated that exposure to unpleasant pictures led to a more deflected trajectory for all of the subjects compared with the pleasant pictures. As a result, the final lateral body position at the end of the locomotion was more distant from the stop button. These results validate our second hypothesis, as with the previous result; the approach behavior is disturbed when the intermediate goal is unpleasant, while the pleasant aspect of the final goal seems to have no effect. The lack of trajectory deviation with respect to the straight line when a negative emotion was associated with the final goal (erasing a pleasant picture) strengthens the dominant role of the emotional valence of the intermediate goal in the trajectory planning process and the automatic link between perception of stimuli valence and approach–avoidance behavior. This result is also in line with the concept of transfer of affective value to instrumental behavior, indicating that emotional biasing of instrumental (goal-directed) action involves interaction with a system that controls innately specified responses (Balleine and Dickinson 1998; Dayan et al. 2006; Ly et al. 2014; Seymour and Dolan 2008).
On the other hand, Pham et al. (2007) and Hicheur et al. (2007) proposed that the central nervous system plans and controls goal-oriented locomotion at the level of whole body trajectories in space and, to some extent, independently of the motor implementation level (Pham et al. 2011). At some superior levels of the nervous system, there would be an abstract representation of the trajectory connected to an estimation of the environmental context and the spatial and postural constraints of the body in relation to this environment (Bernstein 1984). In agreement with this point of view and according to Eder and colleagues (Eder and Klauer 2009; Eder and Rothermund 2008; Eder et al. 2013), mental representations of the trajectory would go along with evaluative coding of approach–avoidance behaviors that match or mismatch the valence of the stimuli. Indeed, walking toward unpleasant pictures involved approach behavior and then a forward trajectory planning that mismatched the negative valence of the picture. As a result, locomotor trajectory planning would be disturbed, leading to the more deflected trajectory and the final position more distant from the stop button as observed in our results. Therefore, when action on the environment involves body displacement at first, the organization of this displacement would not be primarily accessed by codes that represent the instructed response goal as proposed by Hommel and colleagues for discrete action (Haazebroek et al. 2013; Hommel et al. 2001; Memelink and Hommel 2013). The intermediate goal directly linked to the locomotion was not, in this case, an instructed response goal. Response features that are crucial for accomplishing the ultimate task goal (i.e., intention- or final goal-related feature dimensions) could include potential intermediate responses in event coding.
However, the intervention of detailed motor strategy (foot placements, muscular activations, inter-segmental coordination, etc.) which implements these trajectories cannot be excluded. As movement progresses, a control system gradually takes over the movement and makes online adjustments. Through feedback mechanisms, the control system monitors and adjusts the motor program online. In this scenario, the deviation from the theoretical trajectory throughout locomotion without correction at the end of the displacement (final position more distant from the stop button) represents a combination of errors from the initial motor planning and the online motor control; these errors are due to approach behavior that mismatched the negative valence of the picture. This implies that the emotional valence of the intermediate goal would affect both cognitive processes that organize locomotion and online motor control that modulates locomotion throughout its execution.
The last result concerns the APA, gait initiation, and launched locomotion parameters. We observed that the APA duration increased during exposure to the pleasant pictures compared with the unpleasant or neutral ones but without modifying its amplitude as the kinematic parameters of the first gait. This indicates that during pleasant picture viewing, APA duration is slightly modulated to reach a similar stationary gait compared with unpleasant and neutral picture viewing. Moreover, the launched locomotion parameters were similar regardless of the emotion conveyed by the picture. Therefore, the emotions of the intermediate goal affected the duration of the movement preparation linked to gait initiation through cognitive processes. Interestingly, these emotions had no effect on the stride amplitude, duration, and mean velocity included in the motor program responsible for launched locomotion. These results are in agreement with a recent study on goal-directed locomotion in children with autism (Vernazza-Martin et al. 2013).
However, if we refer to our expected results for the APA, another interpretation can be provided that is in agreement with the work of Gelat et al. (2011) who studied gait initiation during a simple congruent versus incongruent gait initiation task. In this study, young adults were instructed to initiate gait (several steps) toward pleasant or unpleasant pictures that corresponded to a congruent (CO) or an incongruent (IC) task. The results revealed that the gait initiation process was slower during IC than CO trials. However, this effect was transient; both the length of the first step and peak of center of mass velocity did not differ between the CO and IC trials by the end of the step. In the present study, we obtained similar results when the incongruent aspect of the task concerned the emotional valence of the final goal, i.e., erasing pleasant pictures. These results suggest that the dynamic phenomena responsible for gait initiation would be influenced by the emotional valence of the final goal.
Conclusion
To conclude, this study shows the necessity of distinguishing the twofold goal involved in goal-directed locomotion and the emotional valence of each. Our results emphasize two points. First, our data suggest that the main goal that organizes locomotion toward a target is the intermediate goal, which is directly linked to body displacement. Therefore, the emotional valence of this intermediate goal has the most effect on the processes that organize and modulate goal-directed locomotion. A future analysis of the arm movement toward the stop button would allow determination of whether the emotional valence of the final goal affects this movement more specifically.
The second point is that the emotional valence of the intermediate goal mainly affects the cognitive processes involved in the locomotion organization. However, this effect depends on the valence associated. A negative valence disturbs the spatial organization of the trajectory planning and online motor control. A positive valence facilitates the temporal organization of the locomotion planning, which translates to a shorter RT. It also modulates the temporal organization of the movement preparation that is linked to gait initiation, which translates to a longer APA duration. This triggers a stable and stereotyped locomotion toward the final goal regardless of its emotional valence. However, this last point requires confirmation of the link between the emotional valences of the final goal and the dynamic phenomena responsible for gait initiation not excluded.
This research provides new perspectives about the potential role of the emotional valence of the intermediate goal on the cognitive processes that trigger movement initiation compared with the cognitive processes that allow mental representation of an action. If the automatic link between perception of stimuli valence and approach–avoidance behavior seems to be clearly established, taking into account the intermediate versus final goal of the action might be essential, not only for the action coding (Hommel et al. 2001), but also for the affective coding of a global motor response = (Eder and Rothermund 2008).
Notes
Congruent: approach/avoidance behaviors associated with pleasant/unpleasant stimuli, respectively; incongruent: approach/avoidance behaviors associated with unpleasant/pleasant stimuli, respectively.
References
Ambron E, Foroni F (2014) The attraction of emotions: irrelevant emotional information modulates motor actions. Psychon Bull Rev. doi:10.3758/s13423-014-0779-y
Bagozzi RP, Baumgartner H, Pieters R, Zeelenberg M (2000) The role of emotions in goal-directed behavior. In: Ratneshwar S, Mick DG, Huffman C (eds) The why of consumption: contemporary perspectives on consumer motives, goals, and desires. Routledge, New York, pp 36–58
Balleine BW, Dickinson A (1998) Goal-directed instrumental action: contingency and incentive learning and their cortical substrates. Neuropharmacology 37:407–419
Bamford S, Ward R (2008) Predispositions to approach and avoid are contextually sensitive and goal dependent. Emotion 8:174–183. doi:10.1037/1528-3542.8.2.174
Bernstein N (1984) The problem of the interrelation of co-ordination and localization. In: Whiting HTA (ed) Human motor actions. Bernstein reassessed. Elsevier/North-Holland, Amsterdam, pp 77–119
Bonnet M, Bradley MM, Lang PJ, Requin J (1995) Modulation of spinal reflexes: arousal, pleasure, action. Psychophysiology 32:367–372
Brenière Y, Do M, Sanchez J (1981) A biomechanical study of the gait initiation process. Journal de Biophysique Médecine Nucléaire 5:197–205
Cacioppo JT, Priester JR, Berntson GG (1993) Rudimentary determinants of attitudes. II: arm flexion and extension have differential effects on attitudes. J Pers Soc Psychol 65:5–17
Carver CS, Harmon-Jones E (2009) Anger is an approach-related affect: evidence and implications. Psychol Bull 135:183–204. doi:10.1037/a0013965
Centerbar DB, Clore GL (2006) Do approach–avoidance actions create attitudes? Psychol Sci 17:22–29. doi:10.1111/j.1467-9280.2005.01660.x
Chen M, Bargh JA (1999) Consequences of automatic evaluation: immediate behavioral predispositions to approach or avoid the stimulus. J Personal Soc Psychol Bull 25:215–224
Cohen J (1988) Statistical power analysis for the behavior sciences, 2nd edn. Lawrence Erlbaum Associates, Hillsdale
Coquery JM (1991) Motivation. Dans. In: Bloch H, Chemama R, Gallo A, Leconte P, Le Ny J-F, Moscovici S, Postel J, Reuchlin M (eds) Grand dictionnaire de la psychologie. Larousse, Paris
Dayan P, Niv Y, Seymour B, Daw ND (2006) The misbehavior of value and the discipline of the will. Neural Netw 19:1153–1160. doi:10.1016/j.neunet.2006.03.002
Dru V, Cretenet J (2011) Performing lateralized approach and avoidance behaviors: effects on perceptual, affective and confidence judgments. J Int Neuropsychol Soc 17:289–294. doi:10.1017/S1355617710001657
Duckworth KL, Bargh JA, Garcia M, Chaiken S (2002) The automatic evaluation of novel stimuli. Psychol Sci 13:513–519
Eder AB, Klauer KC (2009) A common-coding account of the bidirectional evaluation-behavior link. J Exp Psychol Gen 138:218–235. doi:10.1037/a0015220
Eder AB, Rothermund K (2008) When do motor behaviors (mis)match affective stimuli? An evaluative coding view of approach and avoidance reactions. J Exp Psychol Gen 137:262–281. doi:10.1037/0096-3445.137.2.262
Eder AB, Rothermund K, De Houwer J (2013) Affective compatibility between stimuli and response goals: a primer for a new implicit measure of attitudes. PLoS ONE 8:e79210
Elliot AJ (2006) The hierarchical model of approach–avoidance motivation. Motiv Emot 30:111–116
Elliot AJ, Thrash TM (2002) Approach–avoidance motivation in personality: approach and avoidance temperaments and goals. J Pers Soc Psychol 82:804–818
Elliot AJ, Thrash TM (2010) Approach and avoidance temperament as basic dimensions of personality. J Pers 78:865–906. doi:10.1111/j.1467-6494.2010.00636.x
Fawver B, Hass CJ, Park KD, Janelle CM (2014) Autobiographically recalled emotional states impact forward gait initiation as a function of motivational direction. Emotion 14:1125–1136. doi:10.1037/a0037597
Fawver B, Beatty GF, Naugle KM, Hass CJ, Janelle CM (2015) Emotional state impacts center of pressure displacement before forward gait initiation. J Appl Biomech 31:35–40. doi:10.1123/jab.2013-0306
Ferrel C, Bard C, Fleury M (2001) Coordination in childhood: modifications of visuomotor representations in 6- to 11-year-old children. Exp Brain Res 138:313–321
Friedman RS, Forster J (2010) Implicit affective cues and attentional tuning: an integrative review. Psychol Bull 136:875–893. doi:10.1037/a0020495
Frijda NH (1986) The emotions. Cambridge University Press, New York
Frijda NH (2006) The laws of emotion. Erlbaum, Mawwah
Gable SL, Reis HT, Elliot AJ (2003) Evidence for bivariate systems: an empirical test of appetition and aversion across domains. J Res Pers 37:349–372
Gelat T, Coudrat L, Le Pellec A (2011) Gait initiation is affected during emotional conflict. Neurosci Lett 497:64–67. doi:10.1016/j.neulet.2011.04.030
Haazebroek P, van Dantzig S, Hommel B (2013) How task goals mediate the interplay between perception and action. Front Psychol 4:247. doi:10.3389/fpsyg.2013.00247
Haggard P (2005) Conscious intention and motor cognition. Trends Cogn Sci 9:290–295. doi:10.1016/j.tics.2005.04.012
Hicheur H, Pham QC, Arechavaleta G, Laumond JP, Berthoz A (2007) The formation of trajectories during goal-oriented locomotion in humans. I. A stereotyped behaviour. Eur J Neurosci 26:2376–2390. doi:10.1111/j.1460-9568.2007.05836.x
Hommel B, Musseler J, Aschersleben G, Prinz W (2001) The theory of event coding (TEC): a framework for perception and action planning. Behav Brain Sci 24:849–878 (discussion 878-937)
Horslen BC, Carpenter MG (2011) Arousal, valence and their relative effects on postural control. Exp Brain Res 215:27–34. doi:10.1007/s00221-011-2867-9
Krieglmeyer R, Deutsch R, De Houwer J, De Raedt R (2010) Being moved: valence activates approach–avoidance behavior independently of evaluation and approach–avoidance intentions. Psychol Sci 21:607–613. doi:10.1177/0956797610365131
Krieglmeyer R, De Houwer J, Deutsch R (2011) How farsighted are behavioral tendencies of approach and avoidance? The effect of stimulus valence on immediate vs. ultimate distance change. J Exp Soc Psychol 47:622–627
Lane RD, Reiman EM, Bradley MM, Lang PJ, Ahern GL, Davidson RJ, Schwartz GE (1997) Neuroanatomical correlates of pleasant and unpleasant emotion. Neuropsychologia 35:1437–1444
Lang PJ (1995) The emotion probe. Studies of motivation and attention. Am Psychol 50:372–385
Lang PJ, Bradley MM, Cuthbert BN (1997) Motivated attention: affect, activation, and action. In: Lang PJ, Simons RF, Balaban MT (eds) Attention and orienting: sensory and motivational processes. Erlbaum, Hillsdale, pp 97–135
Lang PJ, Bradley MM, Cuthbert BN (2005) International affective picture system (IAPS): digitized photographs, instruction manual and affective ratings. University of Florida, Gainesville
Ly V, Huys QJ, Stins JF, Roelofs K, Cools R (2014) Individual differences in bodily freezing predict emotional biases in decision making. Front Behav Neurosci 8:237. doi:10.3389/fnbeh.2014.00237
Massion J (1997) Cerveau et motricité: fonctions sensori-motrices. Presses Universitaire de France, Paris
Memelink J, Hommel B (2013) Intentional weighting: a basic principle in cognitive control. Psychol Res 77:249–259. doi:10.1007/s00426-012-0435-y
Naugle KM, Joyner J, Hass CJ, Janelle CM (2010) Emotional influences on locomotor behavior. J Biomech 43:3099–3103. doi:10.1016/j.jbiomech.2010.08.008
Naugle KM, Hass CJ, Joyner J, Coombes SA, Janelle CM (2011) Emotional state affects the initiation of forward gait. Emotion 11:267–277. doi:10.1037/a0022577
Neumann R, Lozo L, Kunde W (2014) Not all behaviors are controlled in the same way: different mechanisms underlie manual and facial approach and avoidance responses. J Exp Psychol Gen 143:1–8. doi:10.1037/a0032259
Olofsson JK, Nordin S, Sequeira H, Polich J (2008) Affective picture processing: an integrative review of ERP findings. Biol Psychol 77:247–265. doi:10.1016/j.biopsycho.2007.11.006
Pfister HR, Böhm G (2008) The multiplicity of emotions: a framework of emotional functions in decision making. Judgm Decis Mak 3:5–17
Pham QC, Hicheur H, Arechavaleta G, Laumond JP, Berthoz A (2007) The formation of trajectories during goal-oriented locomotion in humans. II. A maximum smoothness model. Eur J Neurosci 26:2391–2403. doi:10.1111/j.1460-9568.2007.05835.x
Pham QC, Berthoz A, Hicheur H (2011) Invariance of locomotor trajectories across visual and gait direction conditions. Exp Brain Res 210:207–215. doi:10.1007/s00221-011-2619-x
Seymour B, Dolan R (2008) Emotion, decision making, and the amygdala. Neuron 58:662–671. doi:10.1016/j.neuron.2008.05.020
Stins JF, Beek PJ (2011) Organization of voluntary stepping in response to emotion-inducing pictures. Gait Posture 34:164–168. doi:10.1016/j.gaitpost.2011.04.002
Stins JF, Roelofs K, Villan J, Kooijman K, Hagenaars MA, Beek PJ (2011) Walk to me when I smile, step back when I’m angry: emotional faces modulate whole-body approach–avoidance behaviors. Exp Brain Res 212:603–611. doi:10.1007/s00221-011-2767-z
van Dantzig S, Pecher D, Zwaan RA (2008) Approach and avoidance as action effects. Q J Exp Psychol (Hove) 61:1298–1306. doi:10.1080/17470210802027987
Vernazza-Martin S, Longuet S, Chamot JM, Oreve MJ (2013) Emotions and voluntary action: what link in children with autism? Behav Brain Res 251:176–187. doi:10.1016/j.bbr.2013.05.049
Yiou E, Caderby T, Hussein T (2012) Adaptability of anticipatory postural adjustments associated with voluntary movement. World J Orthop 3:75–86. doi:10.5312/wjo.v3.i6.75
Zeelenberg M, Pieters R (2006) Feeling is for doing: a pragmatic approach to the study of emotions in economic behavior. In: DeCremer D, Zeelenberg M, Murnighan JK (eds) Social psychology and economics. Erlbaum, Mahwah, pp 117–137
Zeelenberg M, Pieters R (2007) A theory of regret regulation 1.0. J Consum Psychol 17:3–18
Zeelenberg M, Nelissen RMA, Breugelmans SM, Rik Pieters R (2008) On emotion specificity in decision making: why feeling is for doing. Judgm Decis Mak 3:18–27
Zhang Y, Proctor RW, Wegener DT (2012) Approach–avoidance actions or categorization? A matching account of reference valence effects in affective S-R compatibility. J Exp Soc Psychol 48:609–616
Acknowledgments
The authors would like to thank Sophie Domingues-Montanari for revising the English in this manuscript. The authors report no current or potential conflict of interest.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Vernazza-Martin, S., Longuet, S., Damry, T. et al. When locomotion is used to interact with the environment: investigation of the link between emotions and the twofold goal-directed locomotion in humans. Exp Brain Res 233, 2913–2924 (2015). https://doi.org/10.1007/s00221-015-4361-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-015-4361-2