
Abstract
In this paper, steady-state operating conditions of a doubly fed induction generator (DFIG) are computed considering losses of grid-side (GS) filter. Two different cases are studied for steady-state initialization of the DFIG-based wind turbine systems (WTS). In the first case, active power (P) and reactive power (Q) at DFIG terminals are assumed to be known. In the other case wind speed (\(V_{w}\)), Q is assumed to be known. Apart from considering losses of the DFIG and GS filter, both the cases also consider the non-unity power factor operation of the grid side converter (GSC). For the first case, steady-state operating conditions are calculated by iterative method as well as by non-iterative method. For the second case, iterative method is used to calculate steady-state operating conditions. Calculation of steady-state values of other subsystems of DFIG-based WTS like drive train, controller and network is also shown. The initial values calculated are validated and compared by performing modal analysis and time-domain simulations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The integration of type-3 or DFIG-based WTS is high in present-day power systems. High efficiency, less stress on mechanical components, and the potential of reactive power delivery to grid make DFIG a viable alternative to include in the power system network. On the other hand, the penetration of these converter interfaced machines (CIM) into the power system needs to be thoroughly investigated in stability point-of-view. Negative consequences if any, arising from these CIM needs to be addressed by appropriate control mechanism. Eigenvalue analysis and time-domain simulations are utilized to observe the change in dynamics of overall system, caused by these CIM. Before studying the dynamics of DFIG-connected power system, steady-state initial values must be calculated. Accurate steady-state values aid in properly initializing dynamic investigations before the occurrence of the actual fault, and also to avoid numerical instability [1, 2].
Steady-state initialization of a DFIG-based WTS can be carried out by using basic circuit laws [3], by iterative methods [4,5,6,7,8,9], or by using non-iterative methods [10,11,12,13]. The methods available for steady-state initialization of a DFIG-based WTS are broadly classified as electromagnetic transient programme (EMTP)-based approach and load flow-based approach. EMTP-based approaches use phasor-based technique [14], which deals with non-linear and time-variant systems for small, linear with lumped component networks. However, for a large system, the EMTP-type approach becomes inefficient due to high computational burden and solution may not converge to desirable operating points. On the other hand, load flow programmes are suitable for large systems using minimal mathematical effort. Load flow approach is not suitable for time-variant systems. However, is suitable for both balanced and unbalanced systems. Steady-state model of the DFIG reflects the operation of the DFIG during non-transient state. It should properly represent the power flows and losses. The final steady-state values derived from the steady-state model considered should initialize the DFIG without any initial oscillations.

Schematic of DFIG
Various models representing the steady-state behaviour of a DFIG are available in the literature. The steady-state model is represented as two-port circuit either in T model [15] or \(\pi \) model [16]. Numerous steady-state equivalent circuits of DFIG like PQ model [17], RX model [18] are available in the literature. The equivalent circuit of the DFIG should also consider the GS filter circuit so that filter losses also be taken into account. Calculation of initial values begins with the assumption that DFIG is operating at known active and reactive power at its terminals or wind power and reactive power assumed to be known parameters.
In [10] describes how to initialize various types of wind turbines, including type-3-based wind turbines, but the generator losses are ignored and the flow of reactive power flow through the GSC is assumed to be zero. Concept of torque balancing is used by the author of [11] to initialize full and lower-order models of DFIG. Calculation of initial values including unknown parameters within initialization procedure is shown in [4], but this method is complicated and tedious. Reference [5] uses as PV, PQ and \(V_w-Q\) method and uses the Newton–Raphson (NR) algorithm to calculate initial values without using d-q terms. The author of [13] considered the rotor of DFIG as a current source and calculates the initial values by a non-repetitive method. A direct method to calculate the initial values of DFIG-based WTS is shown in [12].
In most of these works, losses of GS filter are ignored. This paper considers the GS filter loss in the initialization procedure and also considers non-zero reactive power flow through GSC (\(Q_{gsc} \ne 0\)) in the two initialization methods employed. A procedure to calculate steady-state values of other subsystems of DFIG-WTS is also given. Finally, steady-state values are evaluated by eigenvalue analysis and time-domain simulations to examine effectiveness of the initialization methods employed.
The objectives of this paper are: (a) To perform steady-state initialization of a DFIG considering losses of machine and grid-side filter. (b) Utilizing both iterative and non-iterative methods for steady-state initialization, and to compare the performance of both the methods. (c). To calculate steady-state initial values of other subsystems of WTS like turbine, controller, network and DC link capacitor. (d) To validate the steady-state values obtained from eigenvalue analysis and time-domain simulations.
The organization of paper is as follows: Sect. II discusses the steady-state modelling and initialization of a DFIG-based WTS for two different cases. In Sect. III, dynamic modelling of a DFIG-based WTS is shown. In Sect. IV, case studies are conducted on a DFIG connected to a infinite bus system to validate the steady-state values obtained in Sect. II by performing modal analysis and time-domain simulations. In Sect. V, concluding remarks of the present work are given.
2 Steady-state modelling of DFIG
2.1 DFIG-based WTS
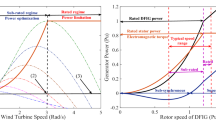
In Fig. 1, the block diagram representation of the DFIG-based WTS is shown where the turbine is coupled to the generator through a gear-box. Stator of the DFIG is directly connected to grid, and the rotor is interfaced to grid via a partial rated back-to-back converter. The converters are controlled by their respective controllers which help in smooth operation of the system [19]. RSC controller coordinates with the wind turbine control to extract maximum power by tracking optimum power points and also help in limiting the mechanical power generated by the turbine system by controlling its pitch angle. The generated mechanical power of wind turbine can be expressed as [20]
where \(\rho \) = density of air in \(\textrm{kg}/{\textrm{m}^3}\), A = area of turbine blades in \({m^2}\), \(C_p\) = performance co-efficient, \(V_w\) = wind velocity in m/s, \(S_{b}\) = MVA base, \(\omega _{rt}\)= rotor speed of the turbine. Details of \(C_p\) and other turbine parameters are referred from [10] and are provided in appendix A.
Apart from controlling the electromagnetic torque, RSC controller has to control reactive power supplied to the grid through stator, by supplying necessary rotor currents into the generator. The objective of a GSC controller is to maintain a constant terminal voltage and to keep voltage across DC-link capacitor constant by which rotor active power will be equal to GSC active power (\(P_{r}\) = \(P_{gsc}\)).

Steady-state model of DFIG including filter
2.2 Modelling of DFIG in steady-state
The steady-state model of a DFIG including the GS filter is shown in Fig. 2.
where \(\vec {V_s} = v_s \angle \delta _s\) and \(\vec {V_r} = v_r\angle \delta _r\) are stator and rotor voltage phasors, respectively. \(\vec {I_s} = i{_s}\angle \gamma _s, \vec {I_r} = i_r\angle \gamma _r, \vec {I_g} = i_g\angle \gamma _g\) are stator, rotor and grid-side current phasors, respectively. The total current is given as
The reactive power flow through GSC is
Here, the line current \(I_l\) is assumed to be negative, due to motoring convention followed.
The losses of the GS filter are given as
2.3 Steady-state initialization in PQ method
The set of non-linear equations of PQ method can be solved by both iterative and non-iterative methods. NR procedure is used to calculate initial values iteratively. To solve these equations by non-iterative method, the set of non-linear DFIG equations are rearranged into solvable quadratic equation. Both iterative and non-iterative methods are discussed in following subsections.

Flowchart depicting PQ initialization procedure
2.3.1 Steady-state initialization using iterative method
Equations related to NR method for initialization are shown as follows.
Iterative function at \(k^{th}\) iteration for NR method is given as
where \(F({\underline{x}})=[f_1, f_2,\ldots , f_8]^\top \), is a set of n equations corresponding to (8a)–(11) which are functions of unknown variable, \({\underline{x}}\) and \([J]_k\) is the \((n \times n)\) Jacobian matrix which contains partial derivatives of the functions \(F({\underline{x}})\) with respect to the variables in \({\underline{x}}\).
The unknown variables are \({\underline{x}} = [i_{sQ}, i_{sD}, i_{rQ}, i_{rD}, v_{rQ}, v_{rD}, i_{gQ}, i_{gD}]^\top \)
The initial values of vector \({\underline{x}}\) are taken as
\({\underline{x}}_0 = [ 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5]^\top \)
The functions \(f_1\) - \(f_8\) correspond to Eqs. (8a)–(11),
The total current supplied by DFIG is equal to sum of stator current and current supplied by GSC
In this work, the reactive power supplied by GSC is assumed to be non-zero
The power loss occurring at the grid-side filter is the difference between rotor active power and grid-side active power, i.e. \(P_{r}\) - \(P_{gsc}\)
The values of unknown vector \({\underline{x}}\) are obtained by solving (7), with initial values assumed in \({\underline{x}}_0\). Figure 3 shows the flow chart defining iterative-based PQ initialization method.
2.3.2 Initialization using non-iterative method
The initial values are calculated non-iteratively using substitution method. The DFIG bus is treated as PQ bus where active and reactive power at DFIG terminals is known. From P and Q, stator voltage, i.e. (\(v_{sQ}\) and \(v_{sD}\)) is calculated by applying fixed point iterative method [9]. The active power (P) is assumed to be equal to input mechanical power \((P_m)\). The slip s corresponding to \((P_m)\) is calculated from (2). Values of Q and \(Q_{gsc}\) are assumed to be known. Other variables, i.e. stator current (\(i_{sQ}\), \(i_{sD}\)), rotor voltage (\(v_{rQ}\), \(v_{rD}\)), rotor current (\(i_{rQ}\), \(i_{rD}\)), and GSC currents (\(i_{gQ}\), \(i_{gD}\)), are calculated by procedure shown as follows:
Referring equation (10), the \(i_{gQ}\) is given as
Substituting (12) in (9a), \(i_{sQ}\) is written as
From (9b) \(i_{sD}\) is written as
Substituting (13) and (14) in (8a), the \(i_{rD}\) is written as
Substituting (13) and (14) in (8b), the \(i_{rQ}\) is written as
Substituting (14), (15b) and (16b) in (8c)
Substituting (14), (15b) and (16b) in (8d)
Substituting (12)–(21d) in (11) we get \(i_{gD}\) as
where
\(a_5 = \frac{v_{sQ}^2}{v_{sD}^2} R_g-a_3a_2-a_4a_1 + R_g\)
\(b_5 = v_{sD} + 2 \frac{v_{sQ}}{v_ {sD}^2} Q_{gsc} R_g +\frac{v_{sQ}^2}{v_{sD}}-a_3b_2-a_2b_3-a_4b_1-a_1b_4\)
\(c_5 = \frac{Q_{gsc}^2}{v_{sD}^2} R_g -b_2b_3 - b_1b_4 + \frac{v_{sQ}}{v_{sD}} Q_{gsc} \) The quadratic solution of \(i_{gD}\) is obtained by solving (19)
Solving Eq. (20) results in two values of \(i_{gD}\); however, only one value of \(i_{gD}\) results in stable operating point. By substituting the stable \(i_{gD}\) in (12)–(18b), the steady-state parameters of the DFIG are obtained.
In Table 1, comparison of the initial values obtained from both iterative and non-iterative method for \(P = 0.68\), \(Q=0.2\), \(Q_{gsc} = 0.1\) is made, all values are in per unit (pu). It is seen that steady-state values are not exactly equal but are close. Steady-state values computed from non-iterative approach do not have rounding-off errors as for iterative methods. Also, an accurate initial guess is needed for iterative methods to prevent system from non-convergence, while in non-iterative method, no initial guess is needed. It can be concluded that initial values calculated from non-iterative methods are accurate and have faster convergence. The advantages of non-iterative methods make it preferable for computing steady initial operating points of DFIG.
2.4 Steady-state initialization in \(V_{w}\)-Q method
Another method of solving initialization problem of DFIG is to consider wind speed (\(V_{w}\)) to be known. Mechanical power developed by wind turbine depends on the speed of the wind. As wind speed is variable in nature, assuming wind speed as constant value makes the initialization method more accurate. The equations considered for \(V_{w} - Q\) method can be solved only by iterative methods and cannot be rearranged such that these equations can be solved linearly. From the wind speed mechanical power developed is calculated. In this method apart from wind speed Q and \(Q_{gsc}\) are assumed to be known parameters.
After calculating mechanical power developed from wind speed, corresponding slip is calculated from Eq. (2). Unknown parameters of DFIG, i.e. stator voltage and current (\(v_{sQ}, v_{sD}, i_{sQ}, i_{sD}\)), rotor voltage and current (\(v_{rQ}, v_{rD}, i_{rQ}, i_{rD}\)) and GSC currents and voltages (\(i_{gQ}, i_{gD}, v_{gQ}, v_{gD}\)), are calculated by applying NR-based iterative method in Eqs. (21a)–(21l).

Flowchart depicting \(V_{w}-Q\) initialization procedure
Figure 4 depicts the flow chart depicting initialization procedure for \(V_w-Q\) case.
where
Due to the motoring convention employed in this work, mechanical power developed by wind turbine is assumed as negative, i.e. \(-P_m\). NR-based iterative method is used to solve the set of 12 non-linear equations to obtain 12 unknown parameters of the DFIG.
Table 3 lists DFIG steady-state values in pu calculated employing iterative method for case index listed in Table 2. In case A of Table 2, \(V_{w}\) is assumed to be 12.5 m/s, corresponding to supersynchronous speeds and Q, \(Q_{gsc}\) are assumed zero. In case B wind speed \(V_{w}\) corresponds to supersynchronous and Q, \(Q_{gsc}\) are assumed to be non-zero. Case C corresponds to subsynchronous speed with wind speed 7.5 m/s and Q, \(Q_{gsc}\) are made zero. Case D corresponds to subsynchronous speed with Q, \(Q_{gsc}\) are assumed to be non-zero.
The reactive power flow from rotor side to grid is given as
2.5 Initialization of other models of WTS
After computing the steady-state initial values of the DFIG, initialization of various other models in WTS is carried out using approach followed.
Wind turbine initialization:
Wind turbine initial values are calculated starting with known steady-state value of s obtained from Eq. 2 for a particular operating condition.
Network parameters initialization:
DFIG controller initialization:
DC-link capacitor initialization:
Steady-state values of turbine, DFIG controller, network and filter are used for eigenvalue analysis and time-domain simulations.
3 Dynamic modelling of DFIG-based WTS
3.1 Drive train model
The two-mass model is used to represent dynamic model of the drive train. Three equations corresponding to shaft, turbine and generator used are [21].
3.2 DFIG dynamic modelling
Dynamic equations of full order model of DFIG are expressed as follows [22].
The developed torque by DFIG is given as
The currents of DFIG are related to stator and rotor flux as follows:
where \(X_{ss} = X_{s} +X_m, X_{rr} = X_{r} + X_m\).
3.3 Interface equations of DFIG to network
The equations for interfacing the DFIG to network are expressed in synchronous reference frame as
A high resistance \(R_L\) with value of 100 pu is connected at DFIG terminals to avoid redundant states.
3.4 Grid-side filter dynamic model
The dynamic equations of the GS filter are written as
3.5 Network model
The dynamic equations of the line connecting DFIG and infinite bus are shown as [23]

Control structure of DFIG

Eigenvalues comparison for iterative and non-iterative case

Eigenvalue plot for \(V_{w}-Q\) case

DFIG interfaced to infinite bus
3.6 Controller dynamic equations
Cascade structure-based controller shown in Fig. 5 is used in this work. Fast inner loop controls the currents. Slower outer loop of both RSC and GSC controls the parameters defined by the control objective. In this case, RSC controller is set to control electromagnetic torque and stator reactive power. The GSC controller has to control DC-link voltage and voltage at the DFIG terminals by supplying appropriate reactive power to grid via GSC. The equations corresponding to RSC and GSC controllers are listed as follows [24].
3.6.1 Dynamic model of RSC controller
Electric torque controller
Stator reactive power controller
Reactive power flow from stator of DFIG to grid is given as
3.6.2 Dynamic model of GSC controller
DC-link capacitor voltage controller
Terminal voltage controller
3.7 Modelling of DC-link capacitor voltage controller
The DC-link capacitor which is a source of reactive power helps in supplying magnetizing currents to the DFIG [1]. The corresponding dynamic equation of DC-link capacitor is
where C, \(v_{dc}\) are DC-link capacitance and its voltage, respectively, and their values are given in appendix. The active power flow from GSC to grid is given as
4 Case studies
The initial values calculated from iterative and non-iterative methods are tested on a 2 MW DFIG interfaced to an infinite bus (see Fig. 8). The initial values calculated are utilized to carry out eigenvalue analysis by linearizing dynamic equations around these steady-state values. Steady-state values also act as initial values for integrator blocks in time-domain simulation model. Filter resistance and reactance values are given in appendix. For parameters of other subsystems of a DFIG-based WTS refer [25]. For gains of GSC controller refer [26]. For eigenvalues the dynamic equations are linearized around a steady-state value obtained from Sect. II. Time-domain simulations are conducted to complement results of eigenvalue analysis. Modal analysis and time-domain simulations are performed in MATLAB/Simulink software.
4.1 Eigenvalue analysis
Table 4 compares the eigenvalues obtained for PQ case with both iterative and non-iterative methods. It is seen that all the eigenvalues are on the left-half of the s-plane, which indicates the system is stable. Eigenvalues corresponding to iterative case are indicated with circle. Eigenvalues corresponding to non-iterative case are indicated with cross. As two of the eigenvalues are very large in magnitude, remaining eigenvalues are close to imaginary axis. In order to observe these eigenvalues a zoomed-in plot of eigenvalues which are close to imaginary axis is plotted within the main plot.
Figure 7 shows the eigenvalues for \(V_w-Q\) case. It is seen that all the eigenvalues are on the left-half of s-plane, which indicates the considered system is stable. Also indicating that the steady-state values calculated are accurate as it maintains the system stable. For analysis with \(V_w-Q\) method, the operating point is deliberately chosen as \(V_w = 11 m/s, Q = 0.1, Q_{gsc} = 0.05.\), from the chosen wind speed, P calculated is 0.6801, which is almost equal to the P defined in PQ method. However, final initial values obtained from \(V_w-Q\) method slightly differ to that of PQ method. This difference in initial values would reflect as variation in final eigenvalues as observed from Table 4. However, to complement the eigenvalue results, time-domain simulation plots are needed to accurately judge the effectiveness of the initialization approach used. The time-domain plots should have a flat start without any initial oscillations and should not destabilize the system when a small disturbance is introduced. From Figs. 6 and 7, it is concluded that the steady-state values computed are accurate as eigenvalue plot shows that the system is stable. Table 4 lists all the eigenvalues for PQ and \(V_w-Q\) cases, for PQ procedure eigenvalues are listed for both iterative and non-iterative methods. Apart from eigenvalues, damping factors and dominant states in each mode are also listed. Participation factor analysis is performed to identify the dominant states in each mode. It is to be noted that dominant states in each mode are same in all the cases considered.

Simulation plots of currents for PQ case with iterative method

Simulation plots of currents for PQ case with non-iterative method

Simulations plot of currents for \(V_w- Q\) case
4.2 Time-domain simulations
The time-domain simulations are shown in Fig. 9 to Fig. 13. Figure 9 shows time-domain simulation plots for the case PQ using iterative method. Plots of \(i_{sD}\), \(i_{sQ}\) that is stator currents are shown, with a small disturbance introduced at 0.5 s of simulation time. The currents plots shown are starting as a straight line without any oscillations and settling to steady-state value after a disturbance is cleared at 0.01 s of the fault occurrence.
Figure 10 shows plots of currents \(i_{sD}\), \(i_{sQ}\) with case PQ for non-iterative method (using initial conditions obtained from non-iterative method). A small disturbance is introduced at 0.5 s by perturbing voltage at infinite bus for 0.01 s. From the simulations plots, it is observed that currents are settling to a steady-state value after the disturbance and also has a flat start initially, equal to the value calculated from non-iterative initialization method.
In Fig. 11, time-domain simulation plots are shown for case \(V_w-Q\). Same disturbance is considered as of above two cases. Similar to the above plots there are no initial oscillations and the current values are starting at the initial values obtained from the steady-state calculation procedure. Also, the currents are settling to the steady-state after the disturbance, which indicates the initial values calculated are accurate and the system is dynamically stable.
Figures 12 and 13 compare the rotor speed and electromagnetic trajectories for the various initialization methods considered. A fault of duration 0.5 s is initiated at 2 s to observe behaviour of rotor speed and electromagnetic torque following a fault for different initialization methods. It is seen from the plots that both rotor speed and electromagnetic torque in PQ method have flat start trajectories following same path in both iterative and non-iterative cases. However, trajectory obtained using \(V_w\)-Q method has slight variation in the initial values with small oscillations. To observe the difference a zoomed-in plot is shown within the main plot for both rotor speed and electromagnetic torque within the main plots. The variation for initial values in \(V_w\) can be attributed to variation in the initial values calculated from different initialization methods.

Comparison of rotor speed trajectories for different initialization methods

Comparison of electromagnetic torque trajectories for different initialization methods
5 Conclusion
Two different methods to initialize the DFIG-based WTS are employed in this paper. The first method that is, PQ approach is solved by both iterative and non-iterative methods and steady-state results are compared. The second approach, i.e. \(V_{w}-Q\) approach is solved by iterative approach. Eigenvalue analysis is performed on a full-order DFIG model to see the dynamic performance of the considered system. Time-domain simulations are performed by introducing a small disturbance to see accuracy of the steady-state values computed. From eigenvalue results, it is seen that all the poles are on left half of the s-plane which indicates the system is stable. From simulation results, it is observed that the currents are having a flat start and are settling to the stable values without destabilization after the fault, which shows the system is stable.
The approaches discussed in this paper help in accurate initialization of the DFIG-based WTS. The approaches employed in this work are flexible to consider non-zero reactive power flow from rotor to grid and filter losses. Apart from DFIG initialization, steady-state initialization of other subsystems of WTS is also discussed in this paper. Validation of steady-state values is performed on a grid-connected DFIG-based WTS by eigenvalue analysis and time-domain simulations. GSC controller states and DC-link voltage controller states are also considered in the analysis.
Data availability
Not applicable.
References
Abad G, Lopez J, Rodríguez M, Marroyo L, Iwanski G (2011) Introduction to a wind energy generation system
Fan L, Miao Z (2015) Modeling and analysis of doubly fed induction generator wind energy systems. Academic Press, Cambridge
Gianto R (2021) Steady-state model of DFIG-based wind power plant for load flow analysis. IET Renew Power Gener 15(8):1724–1735
Amutha N, Kumar BK (2014) Initialization of DFIG based wind generating system. In: 2014 eighteenth national power systems conference (NPSC). IEEE, pp 1–5
Padrón JFM, Lorenzo AEF (2009) Calculating steady-state operating conditions for doubly-fed induction generator wind turbines. IEEE Trans. Power Syst. 25(2):922–928
Karthik DR, Kotian SM, Manjarekar NS (2021) Steady-state initialization of doubly fed induction generator based wind turbine considering grid side filter. In: 2021 13th IEEE PES Asia pacific power energy engineering conference (APPEEC). IEEE, pp 1–6
Kumar Seshadri Sravan V, Thukaram D (2018) Accurate modeling of doubly fed induction generator based wind farms in load flow analysis. Electr Power Syst Res 155:363–71
Ledesma P, Usaola J (2005) Doubly fed induction generator model for transient stability analysis. IEEE Trans Energy Convers 20(2):388–397
Karthik DR, Kotian SM, Manjarekar NS (2022) An accurate method for steady state initialization of doubly fed induction generator. In: 2022 IEEE international conference on power electronics, smart grid, and renewable energy (PESGRE). IEEE, pp 1–6
Slootweg JG, Polinder H, Kling WL (2001) Initialization of wind turbine models in power system dynamics simulations. In: 2001 IEEE Porto power tech proceedings (Cat. No. 01EX502), Vol 4. IEEE, pp 6
Holdsworth L, Wu XG, Ekanayake JB, Jenkins N (2003) Direct solution method for initialising doubly-fed induction wind turbines in power system dynamic models. IEE Proc Gener Transm Distrib 150(3):334–342
Wu M, Xie L (2017) Calculating steady-state operating conditions for DFIG-based wind turbines. IEEE Trans Sustain Energy 9(1):293–301
Alejandro Joaquín P (2019) Initialization of DFIG wind turbines with a phasor-based approach. Wind Energy 22(3):420–32
Louie KW, Wang A, Wilson P, Buchanan P (2005) Discussion on the initialization of the EMTP-type programs. In: Canadian conference on electrical and computer engineering, pp 1962–1965. IEEE
Feijoo A, Villanueva D (2016) A PQ model for asynchronous machines based on rotor voltage calculation. IEEE Trans Energy Convers 31(2):813–814
Eminoglu U, Dursun B, Hocaoglu MH (2009) Incorporation of a new wind turbine generating system model into distribution systems load flow analysis. Wind Energy Int J Progress Appl Wind Power Convers Technol 12(4):375–390
Feijóo A (2009) On PQ models for asynchronous wind turbines. IEEE Trans Power Syst 24(4):1890–1891
Huang C (2018) Two RX models of doubly-fed induction generators for load flow analysis. In: 2018 2nd IEEE conference on energy internet and energy system integration (EI2). IEEE, pp 1–6
Muller S, Deicke M, De Doncker RW (2002) Doubly fed induction generator systems for wind turbines. IEEE Ind Appl Mag 8(3):26–33
de Wekken TV, Wein F Power quality and utilization guide section-8. In: KEMA consulting Distributed generation Leonard Energy Autumn
Manwell JF, McGowan JG, Rogers AL (2010) Wind energy explained: theory, design and application. Wiley, New York
Ekanayake JB, Holdsworth L, Wu X, Jenkins N (2003) Dynamic modeling of doubly fed induction generator wind turbines. IEEE Trans Power Syst 18(2):803–809
Padiyar KR (2006) Power system dynamics—stability and control. BS Publications, Hyderabad
Fan L, Kavasseri R, Miao ZL, Zhu C (2010) Modeling of DFIG-based wind farms for SSR analysis. IEEE Trans Power Deliv 25(4):2073–2082
Prasanthi E, Shubhanga KN (2016) Stability analysis of a grid connected DFIG based WECS with two-mass shaft modeling. In: 2016 IEEE annual India conference (INDICON). IEEE, pp 1–6
Fan L, Zhu C, Miao Z, Hu M (2011) Modal analysis of a DFIG-based wind farm interfaced with a series compensated network. IEEE Trans Energy Convers 26(4):1010–1020
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
DRK was involved in conceptualization, methodology, software, formal analysis, investigation, writing — original draft. NSM and SMK contributed to supervision, writing—review & editing, resources.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendices
1.1 Appendix A
In this appendix following parameters of WTS are listed as given in Ref. [10]
\(C_p\) = \(c_1(\frac{c_2}{\lambda _i}-c_3\beta -c_4)e^{\frac{-c_5}{\lambda _i}}\), \(\frac{1}{\lambda _i}=\frac{1}{\lambda +0.08\beta }-\frac{0.035}{\beta ^3+1}\)
where \(\lambda \) is tip-speed ratio given by \(\lambda \)=\(\frac{\omega _{rtm}R}{V_w}\), \(\beta \) = pitch angle. \(c_1\)=0.22, \(c_2\)=116, \(c_3\)=0.4, \(c_4\)=5, \(c_5\)=21.
The value of \(k_\textrm{opt}\) is calculated by, \(k_\textrm{opt}=\frac{1}{2}\frac{\rho A C_{p_\textrm{opt}} R^3\omega _{rtmB}^3}{s_B \lambda _\textrm{opt}^3}=0.67031\) pu, where R = Rotor radius, \(\omega _{rtmB}\) = Nominal speed of turbine, \(s_B\) = Base MVA.
when, \(\beta \) = \(0^o\), we have \(\lambda _\textrm{opt}\) = 8.1001, and the corresponding \(C_{p_\textrm{opt}}\) = 0.48.
The considered parameters of GS filter are \(L_g\) = 0.0225 pu, \(R_g\) = 0.012 pu
parameters of DC link capacitors are C = 0.014 F, \(v_{\textrm{d}c}\) = 1200 V
Formula used for fixed point iteration method is \(\vec V_{{s(k+1)}} = \vec {V_1} + (\frac{P+jQ}{\vec {V_{s(k)}}})^*Z_l\).
Transmission line resistance (\(R_l\)) is 0.002 pu. Transmission line reactance (\(X_l\)) (including transformer reactance (\(X_{tr}\))) is 0.02 pu
1.2 Appendix B
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Karthik, D.R., Manjarekar, N.S. & Kotian, S.M. Computation of steady-state operating conditions of a DFIG-based wind energy conversion system considering losses. Electr Eng 105, 1825–1838 (2023). https://doi.org/10.1007/s00202-023-01766-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-023-01766-x