
Abstract
This paper presents the performance of a renewable autonomous hybrid grid composed of photovoltaic system, wind turbines, hydrokinetic turbines, diesel generator and energy storage systems. Three energy dispatch control and several storage systems have been studied. Technical, environmental and economic indicators have been used to determine the impact on the hybrid autonomous grid and its sizing optimization. However, this study goes further by conducting a sensitivity analysis such as capital cost, state of charge and time step, to choose the best system configuration. The results show that, when using the energy storage system composed of pumped hydro, under the load following energy dispatch control, the net present cost and cost of energy are lower with respect to others storage technologies proposed. However, the storage system with the lowest CO2 emissions is lead acid battery using the combined cycle energy dispatch control. In addition, the wind turbines have presented the greatest sensibility in the net present cost with respect to the capital cost variation and pumped hydro-storage present sensitivity response with respect to state of charge. All configurations have different several behaviors, therefore, the advantages and disadvantages of each one are analyzed.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The sustainable development of future generations depends on the decisions of the current ones. The importance of generating electrical energy from non-polluting renewable sources lies in the high reliability and low cost. To determine the feasibility of a renewable system, several technical and economic studies must be done using mathematical models or computational tools. Several authors have combined renewable sources and energy storage systems (ESS) to optimize a renewable system and have shown that electric power generation is more efficient using several sources simultaneously [1,2,3]. In this sense, many investigations and practical experiences have been done to optimize a system from environmental, economic or logistical criteria. Then, in [4], the authors presents a review of the different hybrid photovoltaic (PV)—wind turbine (WT) renewable energy hybrid systems used for electrical power generations, comparing energy production and cost using simulation techniques and highlighting HOMER Pro software. Also, it is possible to analyze the operation the diesel generator (DG) by change the depth of discharge of the batteries, reducing greenhouse gas emissions. Depending on the type of electric load, the ESS must be chosen carefully since it represents a high percentage of the total cost of the project, in [5, 6] different storage technologies have been considered for the PV-WT system, the results have shown that lithium ion (Li-ion) and Cadmium Nickel batteries could be as competitive as those of lead acid batteries (LAB) if their investment cost decreases. The most important variable in the feasibility study of hybrid systems focuses on renewable resources. In this regard, depending on the location of the project, the size of the system will be chosen [7]. Additional to PV/WT, another promising renewable generation source under study is the hydrokinetic turbine (HKT), for its easy and cheap installation [1]. An analysis of a hybrid system composed of PV/HKT is necessary, especially in places with high hydric and solar resources. In the references [8, 9], a study of optimization of a hybrid system HKT/PV/LAB/DG off-grid has done, the proposed system is capable of supplying the load reducing the operation of the diesel generator at low electricity costs, the LAB and fuel cells have been used to reduce the operation of the DG. Several authors highlight the performance of HKT in hybrid systems; in general, its use in a micro-grid could be combined with a hydroelectric storage pumping system (PH), the HKT maybe use the water from the PH system to generate electrical energy, resulting in highly efficient systems [10, 11]. An autonomous grid composed of PV/HKT/WT/ESS/DG could be feasible in places with high water, solar and wind resources if the cost of electricity is accessible to remote communities. Depending on the load profile, renewable resources, capital cost, among other factors, the choice of energy storage technology must be analyzed in depth. This is the case of the PV/WT system that has been studied in [5], using three storage technologies, LAB, Li-ion and nickel–cadmium batteries. The results show that LAB presents low cost. Also, Li-ion batteries are a promising option for LAB replacement, as they have a longer life expectancy, high energy density and low self-discharge rate [12,13,14,15,16]. On the other hand, VRF batteries are one of the most promising electrochemical energy storage systems considered to be suitable for a wide range of rapidly emerging renewable energy applications. Nowadays, studies are being done to improve their energy density and performance [17], VRF batteries have characteristics that can be used in renewable systems due to their rapid response to load fluctuations and their long life expectancy [18]. Das et al. have conducted an analysis of a PV/DG system with various energy storage systems such as LAB, Li-ion and VRF using HOMER Pro. The results of the analysis have shown that it is cheaper to use LAB and Li-ion batteries. However, they have not studied variations in the minimum state of charge (SOC) of each technology [19]. In general, by varying the state of charge of the ESS, the cost of the system will also change depending on the electrical load and renewable source. Nevertheless, for high-power off-grid electrical loads, the PH system turns out to be the best choice due to its great energy storage capacity [20]. Additionally, some renewable systems use SC to smooth power peaks, even there are several studies that demonstrate their advantages in renewable systems, which are used in combination with PV, fuel cells, DG, etc. Unlike LAB, SC supports more charge and discharge cycles. Also, it has a longer life expectancy and could be very useful in response to power variations in WT [21,22,23].
The optimization methods used in most of the literature are based on computational tools such as HOMER Pro, a software widely used by the scientific community for the optimization of renewable systems. An important aspect when studying a renewable system with various ESS options is the energy dispatch strategies, because the hybrid renewable energy system (HRES) includes a DG, its operation must be analyzed in detail. In Ref. [19], the performance of a PV/DG/ESS system has been investigated using three energetic dispatch strategies, cycle charging, load following and combined control (CC, LF and CD), the results show that the CD strategy has a lower COE than CC and LF. Nevertheless, the LF strategy has lower CO2 emissions than the other two strategies. All the same, VRF technology has not been considered, neither the SC nor PH. Then, the literature presents many HRES studies with different ESS technologies under various energy dispatch systems. However, certain parameters such as the variation of the minimum SOC, the time step or variations in the cost of capital of each component are not analyzed in depth. Furthermore, few authors combine PV/HKT/WT/DG technologies with respect to a single electric charge and three types of energy dispatch considering LAB, Li-ion, VRF, PH and SC. Therefore, this analysis opens pathways to different uses of renewable components in a system.
In this regard, this paper presents a study related to the optimization and performance analysis of a hybrid autonomous grid composed of PV/WT/HKT/DG/ESS for an off-grid load located in southern Ecuador, the proposed ESS are: LAB, Li-Ion, VRF, PH and SC. In each dispatch control strategy (CC, LF and CD), the results are compared between the different configurations under a technical, environmental and economic analysis such as net present cost (NPC), cost of energy (COE), CO2 emissions, excess energy and renewable penetration. Then, a sensitivity analysis was done with respect to the capital cost of each component, the minimum SOC and the time step. The results are shown in the document.
This study is organized as follows: Sect. 2 presents the methodology. In the first place, the electric load under study and renewable resources such as solar radiation, river speed and wind speed are presented in Sects. 2.1 and 2.2, respectively. Secondly, Sect. 2.3 performs the mathematical modeling of each electrical source and ESS proposed. The economic analysis has been showed in Sect. 2.4. Section 2.5 explains the energy control strategies. Section 3 presents the results and discussions obtained. Finally, Sect. 4 presents the conclusions.
2 Methodology
2.1 Case study
A case study is the University located in southern Ecuador; the daily electric demand in (kW) shown in Fig. 1. The peak demand of 30 kW is between 18:00 and 21:00 h. The minimum demand of 10–15 kW is between 22:00 and 06:00 h. For this study, the annual hourly electrical demand shown in Fig. 2 has been considered. The real data measured at the place show small seasonal variations.

Electric demand daily (kW)

Average seasonal demand
2.2 Renewable resources
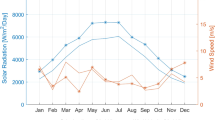
The data have been obtained from the weather station of the University for a year, the global hourly solar radiation is shown in Fig. 3. The maximum value is 1.2 kW/m2 during the months of December and January. In the same way, the wind resource is presented in Fig. 4, the annual hourly average wind speed is approximately 5.5 m/s, there are seasonal variations, the months with the highest wind speed are May, June and July. Then, in Fig. 5, the annual hourly average river speed is 2.5 m/s, the months with lowest resource are July and August, and the months with the greatest resource are June, January and February. For this study, renewable resources have been used with hourly data for 1 year shown in Figs. 3, 4, and 5.

Global solar radiation (kW/m2)

Annual average wind speed in (m/s)

Annual average river speed in (m/s)
2.3 Mathematical representation
The renewable components and the storage system are shown in Fig. 6, a mathematical model has been made as a simulation purpose and was done in the HOMER Pro software. The PV and ESS systems are connected to DC bus, while the WT, HKT and DG are connected to AC bus. A bi-directional converter interconnects the AC–DC bus for power exchange.

Hybrid autonomous grid under study
2.3.1 Modeling of PV array
The output power of the photovoltaic system is calculated using Eq. (1) [24].
2.3.2 Modeling of hydrokinetic turbine
Eq. (2) calculates the power output of the hydrokinetic turbine [8].
The HKT energy is given by:
2.3.3 Modeling of wind turbine
The available power of each wind turbine is given by Eq. (4) [25].
When there are several turbines in the same area, the effect of the wind paths upstream between them must be considered. To solve this problem, it is necessary to develop control strategies that maximize wind farm’s production [26, 27].
2.3.4 Modeling of the DG
The fuel consumption of DG is calculated according to Eq. (5) [28].
The work factor (\( {\text{DF}} \)) (kWh/start–stop/year) is the ratio of power generation of the supplementary primary motors to the total start–stop, is calculated using Eq. (6) [29].
2.3.5 Modeling of batteries
Equation (7) determines the maximum load power of the storage system [19].
where in this case, the minimum state of charge is imposed (SOCmin) is 40%, in Li-ion batteries SOCmin is 20% and VRF SOCmin is 5%, the maximum SOC for the three systems will be 100% [19].
2.3.6 Modeling of SC
The Energy in (Joules) stored in a SC can be calculated using Eq. (8) [30]:
Initial SOC (%) is 100 and minimum SOC is imposed 5% [24]. It is an idealized model. The SC has high power density and low energy density.
2.3.7 Modeling of PH
The energy storage capacity of a PH is calculated using Eq. (9) [31]:
Must consider losses like turbine efficiency, generator efficiency and hydrodynamic losses, usually 80% [32, 33].
In this study, it has been used a generic 245 kWh pumped hydro-generic block in HOMER Pro. That is, the energy of the PH during discharging is 245.25 kWh, and the time to fill reservoir is 14.8 h using an energy = 302.7 kWh. Initial SOC (%): 100 and minimum SOC is 5% [34].
2.3.8 Modeling of inverter DC/AC
The power output is calculated through Eq. (10) [12].
The inverter efficiency is considered 95% as in similar cases [12]. For the simulation, capital costs, operation and maintenance, fuel cost and life expectancy have been considered; these parameters are shown in Table 1.
2.4 Economic study
The main economic indicators used are the NPC and the COE [35]
2.5 Energy control
2.5.1 Dispatch strategy CC
The cycle charge dispatch strategy, if the power from renewable sources is not enough to supply the demand, the DG starts at full load supplying the customers load, and the remaining power is used to recharge the ESS. The operating logic is shown in Fig. 7 [24].

CC control algorithm
where PR is the total renewable output power, PL is the customers load power output, PG is the output power of the DG.
When \( \varvec{ }{\text{PR = PL}} \), the system operates in normal conditions.
-
If, \( \left( {P > 0} \right) \). PR supplies the PL. Therefore, the excess energy is used to recharge the ESS.
-
If, \( \left( {P < 0 \,{\text{and}}\, {\text{SOC}} \ge {\text{SOC}}_{\hbox{min} } } \right) \). There is not enough renewable energy to supply the load through generating sources. Therefore, the customers load will be supplied through the ESS.
-
If, \( \left( {P {\text{ < 0 and SOC < SOC}}_{ \hbox{min} } } \right). \) There are unfavorable conditions by not having energy to supply the customers load. In this case, it is necessary to start the DG at full load to supply the demand and recharge the ESS. Finally, the DG turn off when the ESS has enough stored energy, in this case (SOC \( \ge \) 80%). The time interval depends on the controller.
2.5.2 Dispatch strategy LF
The main difference with respect to CC control lies in the supply priority of the DG. In this case, if the renewable sources do not have sufficient resources to supply the demand, the DG is started supplying only the power required by the load without recharging the ESS, the algorithm is shown in Fig. 8 [24].
-
If, \( \left( {P > 0} \right) \). The power generated PR is greater than the power required by the load PL. Therefore, the excess renewable energy is used to recharge the ESS and the DG must remain off.
-
If,\( \left( {P {\text{ < 0 and SOC }} \ge {\text{SOC}}_{ \hbox{min} } } \right) \). The customers load will be supplied through the ESS.
-
If, \( \left( {P {\text{ < 0 and SOC < SOC}}_{\hbox{min} } } \right). \) The DG starts to supply the demand, the power output will depend on the load. In this case, the DG does not recharge the ESS. Finally, the DG turns off when PR = PL. The ESS will be recharged only with excess renewable power. The time interval depends on the resolution of the controller.

LF control algorithm
2.5.3 CD strategy
Combined dispatch can choose between CC and LF control depending on system conditions. The controller will make the decision depending on the conditions of the system, to reduce the DG starts, emit less CO2 and reduce costs; the algorithm is shown in Fig. 9. Depending on the system conditions, the controller must choose between the CC and LF controls. Because customers load and renewable conditions are random, the combined dispatch strategy uses the current net charge (consumer load—renewable power) to decide. The controller must use the CC strategy if the current net load is low (approximately less than 50%). On the other hand, if the current net load is high the controller must choose the LF strategy. HOMER optimizes each of the options to supply the demand by comparing the cost of charging the ESS with the DG and excess renewable energy.

CD control algorithm
3 Results and discussions
In this study, the optimization of the autonomous micro PV/HKT/WT/DG/ESS grid from a technical, environmental, and economic point of view are discussed below. In order to choose the type of feasible energy control and storage system, each proposed configuration must be analyzed.
3.1 Sizing optimization
This section presents the results of sizing optimization considering the different energy controls and ESS. Table 2 shows the results, if using the CD energy control, the PV capacity increases with respect to the other energy controls. For VRF storage technology, CD control is not recommended. When using SC and PH, the installed capacity of PV is 60 kW while in Li-Ion 40 kW, and 20 kW in LAB, reducing HKT capacity. In addition, the installed capacity of WT and ESS must also be increased under CD control. In this case, when using the CD control, the capacity of PV, WT and ESS must be increased by reducing the HKT.
3.2 Economic results
Many studies have analyzed hybrid systems composed of two renewable sources using the LF control [36,37,38,39], CC control [40,41,42], in other cases, the authors analyze the LF and CC controls [43, 44]. Das explains that in a renewable PV/DC/ESS system, it is cheaper to use LAB than Li-Ion under CD control with respect to DC and LF [12]. However, in this case, Figs. 10 and 11 show the NPC and COE, respectively, the CD control is more expensive than the CC and LF controls in all the proposed ESS. This result is due to the high capacity of renewable sources. Although the cost of the system when using the CC and LF controls is comparable, the LABs, despite having a low initial cost, their COE is high (0.36 $/kWh at best under the LF control). The ESS that has a high initial cost is VRF, with $ 5000/kWh as shown in Table 1, resulting in a COE of $ 0.29/kWh for CC and LF. Then, the COE for the LAB, Li-ion, and PH systems are similar in CC and LF, the variations in cost being due to the initial cost of each ESS and HRES. In summary, from an economic point of view, the system with PH under the LF control has the lowest cost, NPC = $ 300,000 and COE = 0.22 $/kWh.

Variation of NPC in different operating conditions

Variation of COE in different operating conditions
3.3 Environmental results
The environmental result depends on the operation of the DG, Fig. 12 shows that in all systems except LAB, the CO2 emissions for the CD control are higher than the other controls. With LAB, the CD control allows the DG to operate only 354 h/year, reducing diesel consumption to 2200 l/year and increasing renewable penetration to 95% as shown in Table 2. However, the reduction in emissions of CO2 causes an increase in COE up to $ 0.58/kWh.

CO2 emissions in different operating conditions
Table 2 shows that the LF control causes the DG to operate more hours a year than the CC, having to supply the demand whenever the renewable sources do not have the sufficient capacity to do so. Except for PH, in this case, the production of DG (kWh/year) is lower for LF than CC consuming less fuel. In this case, although the DG operates longer with less power than CC, it must always start the DG at full load. In summary, considering only the environmental point of view, the best option is LAB under CD control.
3.4 Energy results
One of the main objectives of a renewable hybrid system is to supply the load permanently. In this case, having a DG, the unmet load is negligible, including that renewable sources have always been oversized to ensure supply of demand. However, when sizing renewable sources, excess energy is produced, as shown in Fig. 13. Table 2 shows that the CD control has more excess energy in almost all cases due to the oversizing of renewable sources and the less energy excess with PH technology under CC control. If there is unavailability of all electrical sources, the ESS ensures a different autonomy time depending on the technology, in this case, PH technology has the greatest autonomy (20.9 h) under the three energy controls.

Variation of Excess Energy in different operating conditions
3.5 Sensitivity analysis
Several sensitivities analyze are presented in this study to further determine the effect of certain indices on the mini grid. Some authors have done the sensitivity analyzes with respect to the variation of the capital cost of its components [5, 12, 19, 39]. In [24], a sensitivity analysis has been performed for a HRES PV/HKT/DG/ESS considering the variation of the capital cost of its elements, minimum SOC and time step with respect to certain technical, economic and environmental indices. Regarding, this study presents several sensitivities analyses considering the variation of the capital cost, the time step and the minimum SOC in each scenario proposed.
3.5.1 Sensitivity analysis regarding capital cost
In Fig. 14, the result of the capital cost sensitivity study of each element with respect to the NPC is presented, the LAB technology has been taken as the ESS model, which is the most used in the HRES mentioned in the literature cited in this paper and the trend is similar with respect to Li-ion and VRF [19]. The WT component has presented the greatest variation with respect to the NPC; the increase is $ 300,000 from 40 to 160% of capital cost variation. The price of fuel is in second place with greater sensitivity, with NPC variations of $ 200,000. The HKT system presents variations of $ 50,000 in the NPC with respect to its cost of capital, the ESS (composed of LAB batteries) with a $ 30,000. The PV system has the lowest sensitivity in the NPC with variations of approximately $ 10,000. Finally, the discount rate has also varied greatly. In [12], the sensitivity analysis of the variation of the capital cost for a PV/DG/LAB system with respect to NPC and COE is presented, the results show that the PV and LAB present the same variation of the NPC with respect to their variations in capital cost, while the price of fuel presents less sensitivity of the NPC with respect to its capital cost. Similarly, [39] studies a PV/DG/LAB system, the sensitivity analysis with respect to the capital cost shows that PV has a higher sensitivity of the NPC by varying its capital cost with respect to LAB and the cost of fuel, respectively.

NPC sensitivity analysis of the micro-grid capital cost components
The variations in the COE are like that in NPC as shown in Fig. 15. Therefore, the WT system has the highest sensitivity with respect to the variation in the capital cost, with an increase of $ 0.25/kWh from 40 to 160% of its capital. In this case, the component with less sensitivity with respect to the COE is the PV, which remains constant and the discount rate in this case tends to increase with a slope like WT.

COE sensitivity analysis of the micro-grid capital cost components
3.5.2 Sensitivity analysis with respect to the minimum SOC under the CC control
The objective of this analysis is to determine the effects on the systems by varying the SOC of the ESS. [24] presents a similar study, using the ESS technologies LAB, Li-ion, VRF and fuel cell for a HRES PV/HKT/DG and using the CC and LF controls. The results of the sensitivity analysis of the minimum SOC with respect to the NPC show that the VRF has the greatest variation with respect to the other ESS technologies under CC control and Li-ion in LF control. In this case, the minimum SOC sensitivity analysis of each ESS has been performed with respect to NPC, COE, CO2 emissions and renewable penetration indexes. In order to compare the results, these have been expressed in per unit (p.u.) dividing each SOC value by its nominal base value. The nominal base of LAB SOC = 40%, Li-ion = 20%, VRF = SC = PH = 5%. Then, the indexes result is also divided for the corresponding base value resulting from the nominal SOC.
SOC = 1 p.u. = 100%. These values are shown in Fig. 16, Li-Ion batteries have the highest sensitivity of the NPC with respect to the SOC, followed by the PH that has an incremental tendency. On the other hand, VRF batteries initially have a decreasing trend until they reach the nominal point, and LAB do not show variations. In addition, it is observed that the behavior of the COE is like NPC. In reference to CO2 emissions, it has been shown that when the SOC is increased, it also increases CO2 emissions, with the PH having the highest sensitivity and LAB technology remains constant. Finally, renewable penetration also shows variations when the SOC change, LAB have no variations. However, the PH has constant decremental variations, while Li-Ion batteries and SC have shown minimal variations to their nominal SOC point, after that, they have presented decremental variations. On the other hand, VRF batteries initially show an incremental behavior until they reach approximately 60% of the nominal value of the SOC, then their behavior is decremental.

Sensitivity analysis of the SOC on micro-grid under CC control
In summary, NPC, COE and CO2 emissions from the energy storage system have presented similar increases while the SOC is higher. Nevertheless, renewable penetration is lower if SOC increases.
3.5.3 Sensitivity analysis with respect to the minimum SOC under the LF control
Figure 17 shows the result of the variation of the SOC under the LF control. In this case, the variations are greater with respect to the CC control, the PH has the largest variations of NPC and SC has the largest sensibility of COE. On the other hand, LAB has presented greater average sensitivity in CO2 emissions and renewable penetration.

Sensitivity analysis of the SOC on micro-grid under LF control
3.5.4 Sensitivity analysis with respect to the minimum SOC under the CD control
In Fig. 18, the results of the sensitivity analysis are presented under CD control. The greatest variation of NPC, COE and CO2 presents LAB system, while Li-Ion has the highest sensitivity in renewable penetration. This type of control has lower sensitivity in CO2 emissions with respect to CC and LF controls. On the other hand, it has the same variation in renewable penetration, the sensitivity of NPC and COE with respect to SOC minimum are greater with respect to the CC control, but smaller than the LF control, SC has presented the maximum sensibility of NPC, COE, CO2 emissions and renewable penetration with respect to its SOC minimum.

Sensitivity analysis of the SOC on hybrid autonomous grid under CD control
3.5.5 Sensitivity analysis regarding time step under CC control
In this section, the sensitivity analysis with respect to the time step has been done, in Fig. 19 the results are shown under the CC control. In general, the results have shown that when analyzing with 5-min time step, the response is more accurate with respect to 60 min.

Sensitivity analysis of the time step on hybrid autonomous grid under CC control
3.5.6 Sensitivity analysis regarding time step under LF control
Under the LF control, the response is similar to the previous case (Fig. 20), the difference lies in some ESS, for example, the SC presents less variation with respect to the NPC and COE, but greater variation of the SC with respect to renewable penetration.

Sensitivity analysis of the time step on hybrid autonomous grid under LF control
3.5.7 Sensitivity analysis regarding time step under CD control
The CD control has shown a different response with respect to the CC and LF controls (Fig. 21). The main feature is that by combining the LF and CC controls, the SC significantly reduces renewable penetration while the time step is increased to 60 min. The PH system also presents considerable variations; in conclusion, the trend is similar for the three energy controls. If analyzed with a shorter time interval, the response is more accurate and optimal.

Sensitivity analysis of the time step on hybrid autonomous grid under CD control
The results have shown that to choose a feasible HRES, several technical, economic and environmental aspects must be considered, including possible variations of certain parameters with respect to time. Finally, the summary of this discussion is shown in Table 3.
4 Conclusions
This document presents a feasibility analysis for a renewable autonomous PV/HKT/WT grid, including a DG and various ESS technologies. Three types of energy control, CC, LF and DC have been done considering certain technical, environmental and economic factors to better understand the behavior of system in each proposed configuration.
There have been several analyses of micro-grid to determine the type of control and appropriate storage system to supply the load efficiently. The results show that for optimize the renewable grid, it is necessary a detailed study of the renewable resources in place, considering all parameters mentioned. Since, if change a certain economic value, this will be reflected from a technical or environmental point of view.
-
It has been determined that if the DC control is applied, the capacity of the renewable sources and the excess energy are greater than the CC and LF controls for all the proposed ESS. This alternative produces greater renewable penetration, causing an increase in the NPC and COE.
-
By using the full-load DG to supply demand and recharge the ESS, its annual operating hours decrease. Therefore, diesel consumption and CO2 emissions also decrease for CC with respect to LF and CD. When applying the CC control, the PV capacity is lower compared to HKT and WT, while the latter two have a similar capacity. The lowest cost ESS technology under CC control is SC, NPC = $ 310,800 and COE = $ 0.228/kWh; renewable sources are PV = 0 kW, WT = 9 units and HKT = 10 units. However, the autonomy of the SC is only 0.3 h.
-
If renewable sources are not able to supply demand, starting the generator to supply the load and not recharging the ESS has a lower cost using LAB and PH technologies. Although, Li-Ion technology under CC control is comparable to PH under LF control. While when using PH technology under the LF control, the COE is lower compared to other technologies (COE = 0.22 $/kWh). In addition, the autonomy is the greatest with 20.9 h.
-
If the capital cost of each component of the micro-grid changes, the result is reflected in the NPC and COE. The WT present the greatest variation of the NPC and COE by increasing or decreasing their capital cost, secondly the cost of fuel, then HKT, ESS and PV. Also, the discount rate presents considerable variations.
-
By increasing the minimum SOC in the ESS, in most of the proposed cases the NPC and COE are also increased, since there will be less stored energy, CO2 emissions are higher, which means that the control prefers to use the DG that increase the capacity of renewable energy sources, reducing renewable penetration, especially in PH, Li-Ion and SC under CC control. While under the control of LF, the PH and the SC have a higher sensitivity in their COE and under the CD control, the SC has a greater variation in its cost, CO2 emissions and renewable penetration.
-
To decrease the NPC, COE and CO2 emissions, and increase the renewable penetration, the minimum SOC in the ESS must be decreased to a technically allowed value.
-
When analyzing a system in HOMER Pro, it is more accurate to do it with a time step of 5 min.
-
PH technology under LF control presents optimal results from the economic, environmental, and technical points of view with respect to LAB, Li-Ion, VRF and SC. With NPC = $ 300,000; COE = 0.22 $/kWh; autonomy = 20.9 h; renewable penetration = 92.8% and CO2 emissions = 8200 kg/year.
Abbreviations
- \( Y_{\text{PV}} \) :
-
Rated capacity of the PV array (kW)
- \( f_{\text{PV}} \) :
-
PV derating factor (%)
- \( \bar{G}_{\text{T}} \) :
-
Solar radiation incident on the PV array (kW/m2)
- \( \bar{G}_{\text{T, STC}} \) :
-
Incident radiation at standard test conditions (kW/m2)
- \( \alpha_{\text{P}} \) :
-
Temperature coefficient of power (%/°C)
- \( T_{\text{c}} \) :
-
PV cell temperature (°C)
- \( T_{\text{c,STC}} \) :
-
PV cell temperature under standard test conditions (°C)
- \( \rho w \) :
-
Water density (kg/m3)
- \( P_{\text{HKT}} \) :
-
Power of the hydrokinetic turbine (kW)
- \( C_{\text{p,H}} \) :
-
Performance coefficient combined of the hydrokinetic turbine
- \( \eta_{\text{HKT}} \) :
-
Hydrokinetic generator efficiency (%)
- \( A \) :
-
Hydrokinetic area (m2)
- \( v \) :
-
Water flow velocity (m/s)
- \( t \) :
-
Parameter representing time (s)
- \( E_{\text{HKT}} \) :
-
Hydrokinetic energy (kWh)
- \( P_{\text{HKT}} \) :
-
Hydrokinetic power (kW)
- \( P_{\text{rated}} \) :
-
Nominal power limit of the wind turbine (kW)
- \( k_{1} \) :
-
Constant represents dimensions of a wind turbine
- \( \rho \) :
-
Air density (kg/m3)
- \( R \) :
-
Rotor radius (m)
- \( C_{\text{p}} \) :
-
Power coefficient of the wind turbine
- \( v_{i} \) :
-
Wind speed (m/s)
- \( F \) :
-
Fuel consumption coefficient
- \( F_{0} \) :
-
Intercept coefficient of the fuel curve
- \( F_{1} \) :
-
Fuel curve slope coefficient
- \( Y_{\text{dg}} \) :
-
Nominal capacity of the diesel generator (kW)
- \( P_{\text{dg}} \) :
-
Electrical power of diesel generator (kW)
- \( {\text{DF}} \) :
-
Ratio of power generation of the supplementary primary motors to the total start–stop (kWh/start–stop/year)
- \( N_{\text{s/s}} \) :
-
Number of starts and stops of diesel generator
- \( Q_{1} \left( t \right) \) :
-
Energy available at the beginning of the operating interval and above the minimum state of charge in batteries (kWh)
- \( Q\left( t \right) \) :
-
Total energy in batteries at the beginning of the passage of time (kWh)
- \( c \) :
-
Ratio of the storage capacity of each energy storage system
- \( k \) :
-
Constant energy storage rate
- \( \Delta t \) :
-
Time interval (s)
- \( E \) :
-
Energy stored in supercapacitor (J)
- \( C \) :
-
Capacitance (F)
- \( V \) :
-
Super capacitor voltage (V)
- \( E_{\text{PH}} \) :
-
Energy stored of pumped storage system (J)
- \( V_{\text{res}} \) :
-
Volume of the reservoir (m3)
- \( h_{\text{head}} \) :
-
Head height (m)
- \( \eta \) :
-
Efficiency of the energy conversion in pumped storage system (%)
- \( P_{0} \left( t \right) \) :
-
Power output of the inverter (kW)
- \( P_{\text{i}} \left( t \right) \) :
-
Input power of the inverter (kW)
- \( \eta_{\text{inv}} \) :
-
Efficiency of the inverter (%)
- \( C_{\text{ann,tot}} \) :
-
Total annualized cost of the system ($/year)
- \( E_{\text{s}} \) :
-
Total energy served (kWh/year)
- \( N \) :
-
Life expectancy of each component
- \( i \) :
-
Annual real interest
- \( C_{\text{cap}} \) :
-
Initial capital cost ($)
- \( n \) :
-
Number of devices in the system
- \( C_{{{\text{O}}\& {\text{Mj}}}} \) :
-
Operation and maintenance cost for each component ($)
- \( C_{\text{f}} \) :
-
Total annual fuel cost ($)
- \( C_{{{\text{R}},i}} \) :
-
Cost replacement for each component ($)
- TAC:
-
Total annualized cost of each component ($/year)
- CRF:
-
Capital recovery factor
- NPC:
-
Net present cost ($)
- COE:
-
Cost of energy ($/kWh)
- WT:
-
Wind turbine
- HKT:
-
Hydrokinetic turbine
- PV:
-
Photovoltaic system
- LAB:
-
Lead acid batteries
- Li-ion:
-
Lithium ion
- VRF:
-
Vanadium redox flow
- PH:
-
Pumped hydro-storage system
- ESS:
-
Energy storage system
- SC:
-
Supercapacitor
- DG:
-
Diesel generator
- SOC:
-
Energy storage system state of charge
- CC:
-
Cycle charge control
- LF:
-
Load following control
- CD:
-
Combined dispatch control
References
Vermaak HJ, Kusakana K, Koko SP (2014) Status of micro-hydrokinetic river technology in rural applications: a review of literature. Renew Sustain Energy Rev 29:625–633. https://doi.org/10.1016/J.RSER.2013.08.066
Castañeda M, Cano A, Jurado F, Sánchez H, Fernández LM (2013) Sizing optimization, dynamic modeling and energy management strategies of a stand-alone PV/hydrogen/battery-based hybrid system. Int J Hydrogen Energy 38(10):3830–3845. https://doi.org/10.1016/J.IJHYDENE.2013.01.080
Choi C et al (2017) A review of vanadium electrolytes for vanadium redox flow batteries. Renew Sustain Energy Rev 69:263–274. https://doi.org/10.1016/j.rser.2016.11.188
AlBusaidi AS, Kazem HA, Al-Badi AH, FarooqKhan M (2016) A review of optimum sizing of hybrid PV–wind renewable energy systems in oman. Renew Sustain Energy Rev 53:185–193. https://doi.org/10.1016/j.rser.2015.08.039
Kaabeche A, Bakelli Y (2019) Renewable hybrid system size optimization considering various electrochemical energy storage technologies. Energy Convers Manag 193:162–175. https://doi.org/10.1016/J.ENCONMAN.2019.04.064
Krishan O, Suhag S (2019) A novel control strategy for a hybrid energy storage system in a grid-independent hybrid renewable energy system. Int Trans Electr Energy Syst. https://doi.org/10.1002/2050-7038.12262
Priyadarshi N, Padmanaban S, Bhaskar MS, Blaabjerg F, Holm-Nielsen JB (2019) An improved hybrid PV-wind power system with MPPT for water pumping applications. Int Trans Electr Energy Syst. https://doi.org/10.1002/2050-7038.12210
Lata-García J, Jurado F, Fernández-Ramírez LM, Sánchez-Sainz H (2018) Optimal hydrokinetic turbine location and techno-economic analysis of a hybrid system based on photovoltaic/hydrokinetic/hydrogen/battery. Energy 159:611–620. https://doi.org/10.1016/j.energy.2018.06.183
Lata-Garcia J, Jurado-Melguizo F, Sanchez-Sainz H, Reyes-Lopez C, Fernandez-Ramirez L (2018) Optimal sizing hydrokinetic-photovoltaic system for electricity generation in a protected wildlife area of Ecuador. Turk J Electr Eng Comput Sci 26(2):1103–1114. https://doi.org/10.3906/elk-1706-23
Kusakana K (2015) Optimization of the daily operation of a hydrokinetic–diesel hybrid system with pumped hydro storage. Energy Convers Manag 106:901–910. https://doi.org/10.1016/J.ENCONMAN.2015.10.021
Koko SP, Kusakana K, Vermaak HJ (2018) Optimal power dispatch of a grid-interactive micro-hydrokinetic-pumped hydro storage system. J Energy Storage 17:63–72. https://doi.org/10.1016/J.EST.2018.02.013
Das BK, Zaman F (2019) Performance analysis of a PV/Diesel hybrid system for a remote area in Bangladesh: effects of dispatch strategies, batteries, and generator selection. Energy 169:263–276. https://doi.org/10.1016/j.energy.2018.12.014
Ghorbanzadeh M, Astaneh M, Golzar F (2019) Long-term degradation based analysis for lithium-ion batteries in off-grid wind-battery renewable energy systems. Energy 166:1194–1206. https://doi.org/10.1016/j.energy.2018.10.120
Charles RG, Davies ML, Douglas P, Hallin IL, Mabbett I (2019) Sustainable energy storage for solar home systems in rural Sub-Saharan Africa—a comparative examination of lifecycle aspects of battery technologies for circular economy, with emphasis on the South African context. Energy 166:1207–1215. https://doi.org/10.1016/j.energy.2018.10.053
Hajiaghasi S, Salemnia A, Hamzeh M (2019) Hybrid energy storage system for microgrids applications: a review. J Energy Storage 21:543–570. https://doi.org/10.1016/j.est.2018.12.017
Liu C, Wang Y, Chen Z (2019) Degradation model and cycle life prediction for lithium-ion battery used in hybrid energy storage system. Energy 166:796–806. https://doi.org/10.1016/J.ENERGY.2018.10.131
Parasuraman A, Lim TM, Menictas C, Skyllas-Kazacos M (2013) Review of material research and development for vanadium redox flow battery applications. Electrochim Acta 101:27–40. https://doi.org/10.1016/J.ELECTACTA.2012.09.067
Alotto P, Guarnieri M, Moro F (2014) Redox flow batteries for the storage of renewable energy: a review. Renew Sustain Energy Rev 29:325–335. https://doi.org/10.1016/J.RSER.2013.08.001
Das BK, Al-Abdeli YM, Woolridge M (2019) Effects of battery technology and load scalability on stand-alone PV/ICE hybrid micro-grid system performance. Energy 168:57–69. https://doi.org/10.1016/j.energy.2018.11.033
Zakeri B, Syri S (2015) Electrical energy storage systems: a comparative life cycle cost analysis. Renew Sustain Energy Rev 42:569–596. https://doi.org/10.1016/J.RSER.2014.10.011
Abdelkader A, Rabeh A, MohamedAli D, Mohamed J (2018) Multi-objective genetic algorithm based sizing optimization of a stand-alone wind/PV power supply system with enhanced battery/supercapacitor hybrid energy storage. Energy 163:351–363. https://doi.org/10.1016/j.energy.2018.08.135
Chong LW, Wong YW, Rajkumar RK, Isa D (2016) An optimal control strategy for standalone PV system with battery-supercapacitor hybrid energy storage system. J Power Sour 331:553–565. https://doi.org/10.1016/J.JPOWSOUR.2016.09.061
Chen C-L, Chen H-C, Lee J-Y (2016) Application of a generic superstructure-based formulation to the design of wind-pumped-storage hybrid systems on remote islands. Energy Convers Manag 111:339–351. https://doi.org/10.1016/J.ENCONMAN.2015.12.057
Arévalo P, Benavides D, Lata-García J, Jurado F (2019) Energy control and size optimization of a hybrid system (photovoltaic-hidrokinetic) using various storage technologies. Sustain Cities Soc. https://doi.org/10.1016/j.scs.2019.101773
Ammari C, Hamouda M, Makhloufi S (2019) Comparison between three hybrid system PV/wind turbine/diesel generator/battery using HOMER PRO Software, pp 227–237
Barreiro-Gomez J, Ocampo-Martinez C, Bianchi F, Quijano N (2019) Data-driven decentralized algorithm for wind farm control with population-games assistance. Energies 12(6):1164. https://doi.org/10.3390/en12061164
Bianchi D, Battista H, Mantz RJ (2006) Wind turbine control systems: principles, modelling and gain scheduling design. In: Advances in industrial control, POD, Springer
Khalid F, Dincer I, Rosen MA (2017) Thermoeconomic analysis of a solar-biomass integrated multigeneration system for a community. Appl Therm Eng 120:645–653. https://doi.org/10.1016/J.APPLTHERMALENG.2017.03.040
Askarzadeh A (2017) Distribution generation by photovoltaic and diesel generator systems: energy management and size optimization by a new approach for a stand-alone application. Energy 122:542–551. https://doi.org/10.1016/j.energy.2017.01.105
Luta DN, Raji AK (2019) Optimal sizing of hybrid fuel cell-supercapacitor storage system for off-grid renewable applications. Energy 166:530–540. https://doi.org/10.1016/j.energy.2018.10.070
Rathore A, Patidar NP (2019) Reliability assessment using probabilistic modelling of pumped storage hydro plant with PV-wind based standalone microgrid. Int J Electr Power Energy Syst 106:17–32. https://doi.org/10.1016/J.IJEPES.2018.09.030
Cheng C, Blakers A, Stocks M, Lu B (2019) Pumped hydro energy storage and 100% renewable electricity for East Asia. Glob Energy Interconnect 2(5):386–392. https://doi.org/10.1016/j.gloei.2019.11.013
Bhayo BA, Al-Kayiem HH, Gilani SIU, Ismail FB (2020) Power management optimization of hybrid solar photovoltaic-battery integrated with pumped-hydro-storage system for standalone electricity generation. Energy Convers Manag 215:112942. https://doi.org/10.1016/j.enconman.2020.112942
HOMER CALCULATIONS. https://www.homerenergy.com/products/pro/docs/3.11/homers_calculations.html. Accessed 08 Feb 2019
HaghighatMamaghani A, AvellaEscandon SA, Najafi B, Shirazi A, Rinaldi F (2016) Techno-economic feasibility of photovoltaic, wind, diesel and hybrid electrification systems for off-grid rural electrification in Colombia. Renew Energy 97:293–305. https://doi.org/10.1016/j.renene.2016.05.086
Das HS, Tan CW, Yatim AHM, Lau KY (2017) Feasibility analysis of hybrid photovoltaic/battery/fuel cell energy system for an indigenous residence in East Malaysia. Renew Sustain Energy Rev 76:1332–1347. https://doi.org/10.1016/j.rser.2017.01.174
Adaramola MS, Paul SS, Oyewola OM (2014) Assessment of decentralized hybrid PV solar-diesel power system for applications in Northern part of Nigeria. Energy Sustain Dev 19(1):72–82. https://doi.org/10.1016/j.esd.2013.12.007
Ngan MS, Tan CW (2012) Assessment of economic viability for PV/wind/diesel hybrid energy system in southern Peninsular, Malaysia. Renew Sustain Energy Rev 16(1):634–647. https://doi.org/10.1016/j.rser.2011.08.028
Mandal S, Das BK, Hoque N (Nov. 2018) Optimum sizing of a stand-alone hybrid energy system for rural electrification in Bangladesh. J Clean Prod 200:12–27. https://doi.org/10.1016/j.jclepro.2018.07.257
Hossain M, Mekhilef S, Olatomiwa L (2017) Performance evaluation of a stand-alone PV-wind-diesel-battery hybrid system feasible for a large resort center in South China Sea, Malaysia. Sustain Cities Soc 28:358–366. https://doi.org/10.1016/j.scs.2016.10.008
Khan MJ, Yadav AK, Mathew L (2017) Techno economic feasibility analysis of different combinations of PV-wind-diesel-battery hybrid system for telecommunication applications in different cities of Punjab, India. Renew Sustain Energy Rev 76:577–607. https://doi.org/10.1016/j.rser.2017.03.076
Shezan SA et al (2016) Performance analysis of an off-grid wind-PV (photovoltaic)-diesel-battery hybrid energy system feasible for remote areas. J Clean Prod 125:121–132. https://doi.org/10.1016/j.jclepro.2016.03.014
Yilmaz S, Dincer F (2017) Optimal design of hybrid PV-diesel-battery systems for isolated lands: a case study for Kilis, Turkey. Renew Sustain Energy Rev 77:344–352. https://doi.org/10.1016/j.rser.2017.04.037
Rohani G, Nour M (2014) Techno-economical analysis of stand-alone hybrid renewable power system for Ras Musherib in United Arab Emirates. Energy 64:828–841. https://doi.org/10.1016/j.energy.2013.10.065
Tontekpower “generadores diesel”. http://www.tontekpower.com/es/diesel-generators. Accessed 08 Apr 2019
Solar Panels|SunPower. https://us.sunpower.com/products/solar-panels. Accessed 08 Apr 2019
SIEMENS, Wind Generators|Energy generation|Siemens. https://new.siemens.com/global/en/markets/wind/equipment/energy-generation/windgenerators.html. Accessed 08 Oct 2019
EnerSys-Hawker Motive Power—Europe—Products. http://www.enersys-hawker.com/english/products.asp?lang=e. Accessed 08 May 2019
Smart Hydro Power, “Smart Hydro Power” (2019). https://www.smart-hydro.de/es/sistemas-de-energia-renovable/turbinas-para-rios-y-canales/. Accessed 15 Jan 2019
Product|BloombergNEF|Bloomberg Finance LP. https://about.bnef.com/product/. Accessed 08 May 2019
HID EUROPE. https://www.hid-europe.com/. Accessed 08 May 2019
Indrivetec AG products|energy storage systems. https://www.indrivetec.com/en_US/. Accessed 18 Apr 2019
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Arévalo, P., Jurado, F. Performance analysis of a PV/HKT/WT/DG hybrid autonomous grid. Electr Eng 103, 227–244 (2021). https://doi.org/10.1007/s00202-020-01065-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-020-01065-9