
Abstract
The current study investigates the use of pulsed plasma jets (spark jets) to reduce the separation induced by shock wave-boundary layer interaction generated by a \(20^{\circ }\) compression ramp in a Mach 3 flow with a Reynolds number of 5,400, based on the undisturbed boundary layer momentum thickness. Surface oil streak visualization is used in a parametric study to determine the optimum pulsing frequency of the jet, the optimum distance of the jet from the compression corner, and the optimum configuration of the jets. Several 3-jet actuator configurations are tested, including those where the jets are pitched, and pitched and skewed. The jet pulsing frequency is varied between 2 and 4 kHz, corresponding to a Strouhal number based on separation length of 0.012 and 0.023. Particle image velocimetry is used to characterize the effect that the actuators have on the reattached boundary layer profile on the ramp surface. Results show that plasma jets pitched at \(20^{\circ }\) from the wall, and pulsed at a Strouhal number of 0.018, can reduce the distance between the separation line and the compression ramp corner by up to 40 % and increase the integrated momentum in the downstream reattached boundary layer, albeit with a concomitant increase in the shape factor.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Shock wave-boundary layer interactions (SWBLI) have the potential to affect the performance characteristics of any aerodynamic structure in a transonic or supersonic flow: helicopter blades, wings, aircraft control surfaces, supersonic inlets, etc. Even if the interaction is not strong enough to cause separation, the adverse pressure gradient will cause the boundary layer to grow significantly [18]. In addition, studies in the 1980s showed that interaction with an impinging shock amplifies the turbulence intensity and Reynolds stresses in the boundary layer [1, 3, 4, 12] which leads to increased skin friction around the interaction, in turn increasing thermal loads as well as drag.
In addition to affecting the downstream boundary layer, the instabilities in the separation bubble itself also can adversely affect aerodynamic structures. The rapid excursion of the upstream shock foot exposes the structure in the vicinity of the interaction to a high-frequency, high-amplitude pressure fluctuation. Such a fluctuation can lead to structural fatigue of these components. This problem can be mitigated by simply overbuilding components exposed to the SWBLI, but being able to control such interactions could lead to overall lighter and better optimized airframes.
Of particular interest is the effect of SWBLI on inlet efficiency. Mixed compression supersonic inlets utilize a series of oblique shock waves to compress the oncoming flow before it enters the engine. However, the interaction between these oblique shocks and the wall of the inlet increases flow distortion, and decreases the amount of recovered stagnation pressure; thus it is advantageous to decrease the amount of flow separation induced by an impinging shock.
1.1 Background
Many innovative mitigation techniques for the problem of shock-induced boundary layer separation have been proposed. Often these techniques involve energizing the boundary layer upstream of the shock to increase the resistance to separation. They can be broadly categorized into two types: passive and active control techniques. Passive control techniques utilize fixed surface structures to alter the flow to control boundary layer separation. They do not require power, but they cannot be deactivated when not needed and thus can induce unnecessary drag. Active control techniques use a powered device that can be turned on and off and tuned to various flow conditions.
1.1.1 Passive SWBLI control
Among the most common passive control structures for low-speed flow are sub-boundary layer vortex generators (SBVGs), structures with heights between 10 and 90 % boundary layer thickness (\(\delta \)), which produce streamwise vortices in the boundary layer that draw high-momentum fluid closer to the wall. Since being introduced in the 1940s, they have been used to reduce flow separation or control separation unsteadiness in all manner of flows [5, 6, 8, 23, 24, 27]. In the 1950s, vane-type vortex generators were found to be effective in reducing shock-induced separation on transonic airfoils [24]. In 1993, McCormick [27] investigated the effect of microramp SBVGs on the interaction of a Mach 1.6 normal shock and found a significant improvement in downstream boundary layer shape factor, but a loss of mass-averaged total pressure compared to the baseline flow. Babinsky et al. [5] also showed in 2009 that microramps are effective at mitigating separated flow in a reflected shock interaction.
Suction downstream of a shock interaction can be achieved using a porous bleed plate placed over a cavity. The pressure differential across the shock induces suction downstream and blowing upstream of the shock, spreading out the pressure gradient across the shock, and compressing the flow more isentropically [32]. This results in greater total pressure recovery behind the shock, and hence less wave drag. This structure has mainly been used to decrease drag and boundary layer separation on transonic airfoils [27, 28]. A device called an aeroelastic mesoflap that deforms in response to pressure in the flow to passively allow injection or bleeding has also been used with some success in increasing stagnation pressure recovery and reducing boundary layer thickness downstream of the SWBLI [16, 38].
1.1.2 Active control devices
In general, active control devices use similar fluid mechanics principles to passive devices, e.g. energizing the boundary layer upstream of the shock interaction. The most common method in supersonic inlets is to simply remove the low-momentum fluid entirely using suction through porous bleed walls [11, 44]. This method is highly effective, but has a downside of significant loss of mass flow in supersonic inlets, as well as a drag increase when the bleed air is discharged into the freestream. Momentum can also be directly added by injecting fluid into the boundary layer or directly into the separation bubble. Selig and Smits [34] found that pulsed injection of air through a slot located inside the separation bubble generated by a compression ramp interaction had the effect of moving the shock upstream but leaving the characteristics of the interaction relatively unchanged.
Jets or some other wall disturbances have also been used to generate streamwise vorticity. Some have used pulsed and unpulsed air jets as vortex generators [9, 13, 37, 41]. Another approach is to use surface electrical discharges [10, 22, 33, 43, 45, 46], also called arc filament plasma actuators, to achieve a similar effect. Electrodes are placed on the surface upstream of the shock interaction and a voltage is applied such that dielectric breakdown of the fluid occurs. The resulting electrical discharge creates a heated region which acts as a bump in the flow to generate streamwise vortices. However, this is not the only way for plasma actuators to control supersonic flow. Surface electrical discharges have also been successfully used to directly steer shocks to more optimum angles in an off-design mixed compression inlet [21], leading to improved pressure recovery and, in the fully off-design cases, improved mass flow through the inlet as well.
Utkin et al. [43] investigated the effect of using these plasma actuators in a Mach 1.3 jet. Enhanced mixing in the jet and a reduction in the length of the potential core were observed for forcing frequencies near the jet preferred mode frequency. Caraballo et al. [10] showed that arc filament plasma actuators significantly increase the momentum in the reattached boundary layer downstream of an SWBLI. Again, a peak effectiveness was found near the preferred frequency of the upstream lambda shock oscillation for a reflected shock interaction.
Another way of directly accelerating the fluid in the boundary layer uses magnetohydrodynamic actuators [7, 47]. A strong magnetic field is used to introduce a Lorentz force on a weakly ionized plasma in the flow. Zaidi et al. [47] showed that a plasma column accelerated by a magnetic field does couple into the velocity of the bulk fluid and accelerates it.
1.1.3 Pulsed plasma jets
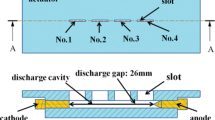
Also called sparkjets, pulsed plasma jets were developed in 2003 by Grossman et al. [19] for use as microactuators for flow control. These devices are synthetic, or zero net mass flow, jets; they are refilled from the freestream after each pulse rather than from an external supply of gas. The jet itself is driven by an electrical discharge in a plenum which heats the air in the plenum through Joule heating, causing it to rapidly expand out of the exit port. Figure 1 shows a schematic diagram of the design used in this study, though other configurations have been used.

Pulsed plasma jet diagram of operation
Synthetic jet actuators are not a new concept; piezoelectric versions having been studied extensively for applications to low-speed and high-speed flow control. Pulsed plasma jets, however, have several key advantages that make them promising for control of SWBLI. One, it is possible to pulse them at significantly higher frequencies than piezoelectric actuators, which allow the pulsed plasma jet actuators to operate at the frequency of the low-frequency oscillations of separated SWBLI. Two, the jet exit velocities are much higher, of the order of 250–600 m/s [19, 31], compared to 10 m/s for piezoelectric synthetic jets [25].
Narayanaswamy et al. [30] applied pulsed plasma jets to control a compression ramp-induced SWBLI. They devised a design with a smaller plenum cavity and a larger exit port than that of Grossman et al., which decreased the plenum refill time, allowing the jets to be reliably pulsed at up to 5 kHz at a discharge current of 1.2 A. Characterization of the properties of the jet design included voltage and current measurements, phase-locked schlieren, and optical emission spectroscopy to determine jet exit velocity, nonequilibrium effects in the discharge, and response time. Jet velocities were found to be relatively insensitive to both orifice diameter and discharge current, ranging between 230 and 320 m/s. A plasma jet injected normally into a Mach 3 flow was found to penetrate 1.5\(\delta \) into the cross flow, and the momentum flux ratio, given by \(\rho _ju_j^2/\rho _{\infty }u_{\infty }^2\), was found to be approximately 0.6 [30]. The efficiency of the jets was found to be about 10 %, with 90 % of the energy of the discharge going to excite the vibrational modes of the gas and only 10 % going for heating and expanding the gas out of the exit port. Golbabaei-Asl et al. [17] also investigated the efficiency of a slightly different design of plasma jet in converting electrical energy into momentum and arrived at a similar result. Characterization of a slightly different design, more similar to the original design by Grossman et al., was performed by Reedy et al., who found that jet velocity was strongly dependent on energy deposition in the gas, as related to capacitance in the driving circuit [42].
Narayanaswamy et al. [31] also showed that the motion of the shock front could be locked into the pulsing frequency of the jets and that the forcing reduced the magnitude of the peak in the power spectral density of the wall pressure in the intermittent region. Controlling the shock foot excursion frequency could lead to ways to reduce the fatigue loading on the airframe, however, this ability of the pulsed plasma jets to lock into instabilities in the separated region also provides a possible mechanism by which they can reduce the overall separation length and improve stagnation pressure recovery.
Beyond applications in flow control, pulsed plasma jets have been studied for flight control as an alternative to moveable control surfaces. Anderson and Knight [2] concluded in their 2012 paper that arrays of plasma jets could be made to impart enough impulse to control the course of a hypersonic vehicle.
1.2 Current work
Pulsed plasma jets have been shown by Narayanaswamy et al. to exhibit control authority over the shock foot instability [31]. In addition, the jets have the potential to energize the boundary layer through both streamwise vortices and through direct momentum addition from the jets [20]. The current work aims to extend the control application of pulsed plasma jets to direct reduction in separation region size and enhancement of boundary layer properties downstream of an interaction.
To this end, the ability of pulsed plasma jets to reduce the separation length scale of a compression ramp interaction in a Mach 3 flow is investigated. First, a parametric study was performed to determine the optimum jet exit orientation, jet exit location relative to the compression ramp, pulse frequency, and pulse duty cycle for reduction in separation length. The size of the shock-induced separation bubble was visualized using oil streak analysis because it was a quick diagnostic that could efficiently eliminate ineffective combinations of parameters. Once an optimum configuration was found, particle image velocimetry (PIV) was used to determine the effectiveness of the pulsed plasma jets in increasing the momentum in the reattached boundary layer downstream of the shock interaction.
2 Experimental setup
2.1 Wind tunnel facility
Experiments were performed in the Mach 3 wind tunnel in the Flowfield Imaging Lab at The University of Texas at Austin. The wind tunnel was a blowdown type pressure-vacuum tunnel, supplied by a \(7 \hbox { m}^3\) storage tank at 900 kPa and vented to a \(50 \hbox { m}^3\) vacuum tank evacuated to 6.5 kPa. The tunnel had a full span splitter plate built into the nozzle to allow wake formation in the test section. For this study, the splitter plate was extended and used as a floor, effectively reducing the test section size by half, to 50.8 mm wide by 22.5 mm high, as shown in Fig. 2. Typical runs use a stagnation pressure of 170 kPa and 300 K stagnation temperature for a runtime of approximately 45 s. The 99 % boundary layer thickness, \(\delta \), on the top surface of the splitter plate was taken to be \(4.5\pm 0.5 \hbox { mm}\) based on previous measurements at similar conditions in the same facility [29]. The \({Re}_{\theta }\) of the incoming boundary layer is approximately 5,400, indicating a turbulent boundary layer.

Wind tunnel assembly
2.2 Plasma actuator array
The plasma actuator design is based on the work of Narayanaswamy et al. [30] and uses a horizontal cylindrical plenum cavity 2.4 mm in diameter bounded by electrodes at each end. The plasma leaves the plenum cavity through a 1.78 mm jet exit tube drilled through the side of the cavity. The actuator plate is made from boron nitride ceramic, and the electrodes are copper plugs 6.35 mm in length. The cathode is sharpened to a point to facilitate gas breakdown. Each actuator plate contains three plasma actuators spaced 8 mm apart in the spanwise direction. The jet-to-crossflow momentum flux ratio, \(\frac{\rho _{j}u_{j}^2}{\rho _{\infty }U_{\infty }^2}\), is approximately 0.6, and the jet exit velocity is 250 m/s [30].
Three jet injection angles were investigated for their effectiveness in controlling the shock-boundary layer interaction: \(45^\circ \) pitch and \(0^\circ \) skew, \(20^\circ \) pitch and \(0^\circ \) skew, and \(22^\circ \) pitch and \(45^\circ \) skew, where the pitch angle is the angle up from the streamwise direction toward the floor-normal direction and the skew is the angle toward the spanwise direction. The location of the jets relative to the ramp, as well as the direction of the pitch and skew angles are shown in Fig. 3.

Schematic of locations of jets and compression ramp
The actuator plates are integrated into the extended tunnel splitter plate so their top surface is flush with the “floor” of the test section. An oblique shock was generated downstream of the actuators using a \(20^\circ \) compression ramp also attached to the splitter plate. The ramp was attached such that it can be placed at an arbitrary location of between 0 and 30 mm downstream of the jet centerlines. The ramp model is 3.8 cm in width, 75 % of test section width, to avoid excessive interaction with the wall boundary layers of the tunnel. For most of the ramp positions, the separation line was observed to be approximately straight over the width of the camera field of view (approximately 2.5 cm, or about 70 % of the ramp width). A model of the wind tunnel assembly is shown in Fig. 2.
The cathodes were connected to a 2-kV power supply (Spellman SL1200) which provides the breakdown voltage. The current is limited by a 1,000 \(\Omega \) ballast resistor. To control the pulse rate of the actuators, the anode is connected to ground through a STP4N150 PowerMESH MOSFET. The MOSFET is switched at between 2,500 and 4,000 Hz using a pulse generator(Berkeley Nucleonics Model 500) and a switching circuit the same as that used by Narayanaswamy et al. [30]. The pulse width was varied between 20 and \(45\,\upmu \hbox {s}\), giving a duty cycle of between 5 and 18 %. The biggest effect of varying the pulse width is that it varies the dissipated energy per jet pulse, which varies linearly with pulse width over the range considered. The dissipated energy ranged from 22 to 49 mJ per jet per pulse for pulse widths of 20–\(50\,\upmu \hbox {s}\), respectively.
2.3 Flow visualization
2.3.1 Surface oil streak visualization
Surface streak visualization was done using a mixture of approximately three parts SAE-30 motor oil to one part \(\hbox {TiO}_2\) powder. The mixture was applied to the surface of the splitter plate before every run. The oil streaks were imaged through a fused silica window in the ceiling of the tunnel using a Kodak Megaplus ES-1 camera at a frame rate of 10 Hz.
When the tunnel was started, a streak of oil formed at the upstream edge of the separated region. An example oil streak image is given in Fig. 4. In the analysis, the separation line is taken to be the line formed by the greatest build-up of oil. Because the unforced separation line was observed to be fairly straight, the average distance of the streak from the ramp corner is taken to be the unforced separation distance, as shown in Fig. 4, and this distance is used to normalize the separation line displacement. On the other hand, the forced separation region is highly three-dimensional, so the change in separation size is taken to be the maximum local displacement of the separation line between the two cases, as this measure quantifies the actuators’ peak control authority. We should note that the average displacement is significantly less than the peak displacement, but the average displacement will be highly dependent on the particular jet geometry used and so may not represent the optimal results that could be achieved with these actuators. The uncertainty in the measured location of the separation line is dependent on the resolution of the oil streak images and how spread out the oil streak is on the surface. The location of the oil streak was determined by finding the edge of the streak based on the intensity of the image, and the uncertainty is defined as the pixel spread of the gradient between the high intensity of the oil streak and the low intensity of the surface. In these cases, the pixel spread was approximately 5 pixels, making the measurement uncertainty approximately 0.1 mm. This uncertainty applies to both the unforced separation distance and the change in separation line location. The total uncertainty for the normalized separation line displacement is assumed to sum as the root of the sum of the squares of the component uncertainties.

Example of oil streak flow visualization image, showing separation line, and compression ramp corner
The separation line could be reliably determined from the images, but the reattachment line was difficult to discern and so the overall size of the separated region could not be reliably measured. The distance between the separation line and the corner of the compression ramp was used as a surrogate metric, but this surrogate for separation length assumes that the downstream reattachment line does not move when the jets are turned on. As such, one can only draw conclusions about how the actuators affect the separation line location and not the overall separation bubble size. A quantification of the discrepancy between the estimated separation length and the true separation length assuming no movement of the reattachment point is made using data from Settles et al. [35]. For a \(20^\circ \) compression ramp, the separation point occurs approximately \(0.5\delta \) upstream of the compression corner, and the reattachment point occurs approximately \(0.1\delta \) downstream of the corner. Neglecting the downstream section of the separated region then incurs a bias of 17 % in the calculated percent change in separation length scales.
2.3.2 Particle image velocimetry
PIV was used to obtain the velocity field on the ramp downstream of the separation region. The freestream flow was seeded with \(1\,\upmu \hbox {m}\) diameter olive oil droplets using a TSI model 9306 six-jet atomizer pressurized to 85 psi. The particles were illuminated using a dual-cavity, frequency-doubled Nd:YAG laser (Spectra Physics PIV 400), with a pulse separation of \(0.5\,\upmu \hbox {s}\). Image pairs were captured at 10 Hz using a frame-straddling 2k \(\times \) 2k pixels CCD camera (Princeton Instruments Megaplus ES4020) and a PIXCI EB1 frame grabber PCI card. The camera was fitted with a Nikkor 105 mm lens operated at an f-number of 2.8.
PIV images were processed using the LaVision software DaVis 7.2. The processing procedure used was based on that of Narayanaswamy [29], for which a very similar wind tunnel and imaging setup was used. The final interrogation window size was 16 \(\times \) 16 pixels, and the maximum pixel displacement was 17 pixels, corresponding to the freestream. Mean vector fields were calculated for each test case from approximately 200 instantaneous fields.
The measurement plane for the PIV study was chosen to be a streamwise-oriented vertical plane centered between the centerlines of two jet exits, as this was where the greatest movement of the separation line was observed.
3 Results
3.1 Parametric study
To find the optimal jet configuration, multiple parameters were investigated: frequency of pulses, duty cycle, jet orientation, and downstream distance of the ramp. Figure 5 shows an example of a case for which actuation by the jets produced downstream motion of the separation line.

Example of downstream displacement of separation line
The distance, \(x\), between the jet centerline and the compression ramp corner was varied between 6 and 28 mm (\(x/\delta \) of 1.7 and 8, respectively). Figure 6 shows the effect of the jets on the separation distance versus the distance of the jets from the compression corner for all of the test cases. From the plot, it is clear that there is a distinct cutoff distance at approximately \(x/\delta =3\), above which the jets have the effect of increasing the separation length scale and below which they decrease the separation length. It is important to note that this cutoff appears to be independent of any of the other parameters investigated. This effect is consistent with the findings of Narayanaswamy et al. [31], where the jets were placed at \(x/\delta =6\) upstream of the separated flow and they also observed an overall upstream motion of the forced separation shock.

Change in separation region size vs. streamwise location of compression ramp, aggregated for all three actuators (including forcing frequencies from 1 to 4 kHz). A negative value for change in separation region length indicates a reduction in size
One possible reason for this cutoff point is an interplay between two effects: streamwise vorticity and heat addition. The jets serve to generate streamwise vorticity, which tends to decrease the separation length scale but would die out around \(x/\delta =3\). On the other hand, the discharges also serve to heat the boundary layer, making it more buoyant and increasing the tendency towards separation.
Figure 7 shows a scatter plot of the performance of each jet, but only for the test cases in which a reduction in separation distance was observed. The \(20^\circ \) pitch/\(0^\circ \) skew jets performed the best by far, with every test case performing better than the other jet configurations. The other two configurations were more on par with each other, the skewed jets in the 15–20 % range, and the \(45^\circ \) pitched configuration only reducing the separation by about 15 %.

Comparison of separation reduction for different jet configurations
Looking at the separation line visualized by the surface oil streaks, we can also get an idea of the flow structures causing this reduction in the separation length scale. In the oil streak image in Fig. 8, one can see that between the jets the separation line is pushed significantly downstream, whereas directly downstream of the jet exits, the separation line is moved upstream slightly. This suggests that the reduction in separation is caused by a counter-rotating vortex structure produced between two jets. A schematic diagram below the image in Fig. 8 outlines the probable flow structure. Between the jet exits, these counter-rotating vortices pull higher-velocity fluid from the top of the boundary layer down close to the wall, increasing the boundary layer’s resistance to separation. However, downstream of the jet exits, the vortices have the opposite effect, pulling lower velocity air into the upper boundary layer and decreasing the resistance to separation in that region.

Illustration of the separation reduction mechanism. The pictured configuration is for the \(20^\circ \) pitch \(0^\circ \) skew case, but similar separation line shapes were observed for all forced cases in which a reduction in separation size was observed
After fixing the ramp location at the optimal distance of \(1.5\delta \) downstream of the jet exits, the effect of jet pulsing frequency was also investigated. The forcing frequency of the actuators was varied between 2 and 4 kHz, corresponding to Strouhal numbers of 0.012 and 0.023. The upper limit of 4 kHz is a limitation of the power rating of the voltage supply. Figure 9 shows the effect of forcing frequency on the change in separation distance. There is a lot of scatter in the data caused by problems with the power supply for the jets, as well as arcing exterior to the jet cavities which affected the amount of discharge energy in the jets from run to run. However, in the figure there is a clear peak in effectiveness at a forcing frequency of 3,200 Hz.

Percent change in separation length vs. pulse frequency
The frequency of 3,200 Hz corresponds to a Strouhal number of 0.018, based on a separation distance, \(L\), of 3.4 mm and a \(U_\infty \) of 615 m/s. According to Dupont et al. [14], the upstream leg of the lambda shock oscillates with a Strouhal number of 0.025 for a reflected shock from a \(9.5^\circ \) compression ramp. Erengil and Dolling [15] found a similar Strouhal number in a compression ramp interaction. Caraballo et al. [10] found that pulsing their plasma actuators with a Strouhal number of 0.03 proved most effective at increasing the momentum of the flow inside the interaction region of a SWBLI. This suggests that in addition to the vortex generator effect of the plasma jets, the forcing frequency also couples into the natural frequency of the instability in the separated region to push the shock foot farther downstream on average.
3.2 PIV of downstream boundary layer
To characterize the effect of the pulsed plasma jets on the boundary layer profile downstream of the SWBLI, PIV was performed for the most effective case found: 3,200 Hz forcing frequency with a \(1.5\delta \) ramp location and \(20^\circ \) pitch \(0^\circ \) skew jets. The measurement plane was positioned at the centerline between two jets, where the maximum effect was noted during the oil streak analysis phase.
A velocity profile was calculated from the average velocity field along a line normal to the compression ramp, centered approximately \(3\delta \) downstream of the compression corner. In the test setup, this point is on the ramp surface, just upstream of where the flow starts to expand around the top of the ramp. The resulting boundary layer profile is shown in Fig. 10. Laser reflection from the floor eliminated data points for \(y/\delta < 0.4\). A wall-wake profile described by Sun and Childs [26, 39, 40] was used to extrapolate the boundary layer profile down to the floor, a technique shown by Mathews et al. to give physically realistic values for \(\delta \) and \(C_f\) for a variety of flows including reattaching flow in a shock-boundary layer interaction [26].

Forced and unforced boundary layer velocity profiles 3\(\delta \) downstream of SWBLI on midplane between two plasma jets for the \(20^{\circ }\) pitch \(0^{\circ }\) skew case
It should also be noted that in generating the wall-wake boundary layer profiles and calculating the boundary layer integral properties, an adiabatic wall was assumed. This is reasonable from the standpoint of convective heat transfer from the walls since the adiabatic wall temperature and the initial wall temperature are both approximately room temperature. However, if the heating from the jets is significantly affecting the flow in the PIV field of view then it is not possible to know the actual density profile for the forced case and the calculated wall-wake profile will not represent the forced case as well. A rough estimate of the deviation from an adiabatic condition due to heat addition by the plasma jets can be calculated based on the power dissipation of the jets. Each jet dissipates 100 W of power for a total of 300 W for the array. Based on measurements taken by Narayanaswamy et al. [30], only 10 % of the power goes toward heating the gas, and the rest raises the vibrational temperature. Thus, approximately 30 W of power goes directly toward gas heating. We obtained an order-of-magnitude estimate of the temperature rise in the boundary layer due to the jets by assuming complete mixing of the jet exhaust with the section of the boundary layer spanning the jet array—16 mm wide. We modeled this mixing as volumetric heat addition and show that depositing 30 W into the boundary layer only increases the total enthalpy by 0.6 %—a negligible amount.
The fit profiles are shown in Fig. 11. From the fit profile the momentum thickness and shape factor for the forced and unforced boundary layers were calculated and are given in Table 1. The boundary layer thickness for the forced case is significantly decreased from that of the unforced flow, which can also be seen in Fig. 10, meaning it has more integrated momentum. At first glance, this would seem to be inconsistent with the lower friction coefficient for the forced case. However, the shape factor of the forced case is also higher, indicating a more destabilized boundary layer, which would have a smaller velocity gradient near the wall. Because such a large fraction of the boundary layer could not be measured, care must be taken in interpreting the results of the fit. The reduction in boundary layer thickness is a reliable result since it is fully defined by the measured values. Indeed, the reasonably large 8 % reduction in momentum thickness for the forced case is also very likely reliable, as even in the raw data points, a significant reduction in the measured velocity of up to 6 % at a given \(y/\delta \) location is observed. On the other hand, the large 12 % reduction in skin friction for the forced case is a little more questionable as it depends greatly on how the flow is behaving at the wall. Mathews et al. [26] noted that though the \(C_{\!f}\) values calculated from the Sun–Childs formulation compared favorably to other formulations like Ludwieg–Tillman, the methods often differed by up to 10 %, especially in the region immediately following a separated SWBLI. It should be noted, however, that this is also a region of the flow in which the Ludwieg–Tillman formulation is less reliable.

Forced and unforced best-fit wall-wake model velocity profiles \(3\delta \) downstream of SWBLI for the \(20^{\circ }\) pitch \(0^{\circ }\) skew case
Since the flow downstream of the separation has been affected by both the plasma jets and the SWBLI, determining the exact cause of the differences between the forced and unforced cases is difficult. The reduction in overall boundary layer thickness for the forced case is likely directly caused by the reduction in size of the separated region. A larger separated region causes the flow to more gradually compress upstream of the compression corner rather than abruptly compressing at the corner, decreasing the pressure gradient. Reducing the size of the separated region increases the abruptness of the compression and strengthens the shock. It is instructive to compare these results with outgoing boundary layer profiles found by Settles et al. [36]. They determined that for a \(20^{\circ }\) compression ramp in Mach 2.85 flow, the ratio of incoming to outgoing boundary layer thickness was 0.75, whereas a calculated value using continuity predicted a value of 0.65, which suggests that the presence of the separated region inflates the outgoing boundary layer. It would then make sense that reducing the size of the separated region would reduce the overall thickness of the outgoing boundary layer.
One interesting question these results raise is why the downstream boundary layer appears to be more prone to separation when previous observations indicate that the shock-induced separation and the overall outgoing boundary layer thickness are reduced. It is possible that reducing the separated flow directly destabilizes the boundary layer. Settles et al. [36] showed that higher ramp angles exhibited more distortion in the outgoing boundary layer, and the boundary layer took longer to evolve back to the equilibrium wall-wake profile. Reducing the size of the separated region increases the strength of the separation shock, which could destabilize the boundary layer more even while reducing its overall thickness.
4 Conclusion
Pulsed plasma jets are promising as a method for reducing shock-induced boundary layer separation from a compression ramp. Plasma jets were shown to be effective in reducing the distance between the separation line and the compression ramp corner, though further study will be needed to investigate whether this reduction corresponds to a reduction in the overall size of the separated region.
The most important variable in how effective pulsed plasma jets are is the distance between the jets and the compression ramp corner, with optimum jet placement being \(1.5\delta \) upstream of the compression ramp corner. Above \(3\delta \), the effect of the jets abruptly diminishes, suggesting the boundary layer mixing induced by the jets dies out relatively quickly. It was also determined that the optimum jet configuration is a low pitch angle and zero skew angle. The jets also show a peak effectiveness at a Strouhal number of 0.018, which agrees with similar findings by Caraballo et al. [10] and is consistent with findings that the instabilities in the separated region have a maximum amplitude at a Strouhal number of about 0.025.
Finally, it was shown using PIV that pulsed plasma jets can also decrease the skin friction and overall thickness of the boundary layer downstream of the shock interaction at the expense of making the boundary layer somewhat more prone to separation. This would seem to indicate that reducing the size of the separated region is counterproductive if the goal is to minimize flow distortion downstream of the SWBLI. It might be more productive to move the jets farther upstream of the separated region and increase the size of the separated region to reduce the strength of the separation shock and possibly reduce distortion in the boundary layer downstream of the interaction. This will be the subject of future research.
Abbreviations
- \(\delta \) :
-
Boundary layer thickness
- \(x\) :
-
Streamwise ramp location
- \(L\) :
-
Separation length scale
- \(U_\infty \) :
-
Freestream velocity
- \(u_j\) :
-
Jet velocity
- \(\rho _{j}\) :
-
Jet density
- \(\rho _{\infty }\) :
-
Freestream density
- \(C_f\) :
-
Skin friction coefficient
- \(\delta ^{\star }\) :
-
Displacement thickness
- \(\theta \) :
-
Momentum thickness
- \(Re_\theta \) :
-
Reynolds number based on momentum thickness
- \(H\) :
-
Shape factor
References
Alexander, J.S., Muck, K.C.: Experimental study of three shock wave/turbulent boundary layer interactions. J. Fluid Mech. 1(182), 291–314 (1987)
Anderson, K.V., Knight, D.D.: Plasma jet for flight control. AIAA J. 50(9), 1855–1872 (2012)
Andreopoulos, J., Muck, K., Dussauge, J., Smits, A., Selig, M.: Turbulence structure in a shock wave/turbulent boundary-layer interaction. AIAA J. 27(7), 862–869 (1989)
Anyiwo, J.C., Bushnell, D.M.: Turbulence amplification in shock-wave boundary-layer interaction. AIAA J. 20(7), 893–899 (1982)
Babinsky, H., Li, Y., Ford, C.W.P.: Microramp control of supersonic oblique shock-wave/boundary-layer interactions. AIAA J. 47(3), 668–675 (2009)
Barter, J., Dolling, D.: Reduction of fluctuating pressure loads in shock/boundary-layer interactions using vortex generators. AIAA J. 33(10), 1842–1849 (1995)
Bisek, N., Rizzetta, D., Poggie, J.: Plasma control of a turbulent shock boundary-layer interaction. AIAA J. 51(8), 1789–1804 (2013)
Blinde, P.L., Humble, R.A., van Oudheusden, B.W., Scarano, F.: Effects of micro-ramps on a shock wave/turbulent boundary layer interaction. Shock Waves 19, 507–520 (2009). doi:10.1007/s00193-009-0231-9
Bueno, P., Hou, Y., Clemens, N., Dolling, D.: A piv study on the effect of pulsed-jet injection upstream of a mach 2 shock wave/turbulent boundary layer interaction. In: Proceedings of ICIASF ’03. 20th International Congress on Instrumentation in Aerospace Simulation Facilities, pp. 59–69 (2003). doi:10.1109/ICIASF.2003.1274853
Caraballo, E., Webb, N., Little, J., Kim, J.H., Samimy, M.: Supersonic inlet flow control using plasma actuators. In: Proceedings of 47th Aerospace Sciences Meeting (2009). doi:10.2514/6.2009-924
Cubbison, R.W., Meleason, E.T., Johnson, D.F.: Effect of porous bleed in a high-performance axisymmetric mixed compression inlet at mach 2.5. In: Proceedings of Nasa tm x-1692, Lewis Research Center, Cleveland, OH (1968)
Delery, J.M.: Experimental investigation of turbulence properties in transonic shock/boundary-layer interactions. AIAA J. 21(2), 180–185 (1983)
Doeffer, P., Szwaba, R.: Shock wave-boundary layer interaction control by streamwise vortices. In: Proceedings of 21st ICTAM Symposium (2004)
Dupont, P., Haddad, C., Debiève, J.F.: Space and time organization in a shock-induced separated boundary layer. J. Fluid Mech. 559, 255–277 (2006). doi:10.1017/S0022112006000267
Erengil, M.E., Dolling, D.S.: Unsteady wave structure near separation in a mach 5 compression rampinteraction. AIAA J. 29(5), 728–735 (1991)
Gefroh, D., Loth, E., Dutton, C., McIlwain, S.: Control of oblique shock/boundary layer interaction with aeroelastic mesoflaps. AIAA J. 40(12), 2456–2466 (2002)
Golbabaei-Asl, M., Knight, D., Anderson, K., Wilkinson, S.: Sparkjet efficiency. In: Proceedings of 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition (2013). doi:10.2514/6.2013-928
Green, J.E.: Interactions between shock waves and turbulent boundary layers. Prog. Aerosp. Sci. 11, 235–340 (1970)
Grossman, K.R., Cybyk, B.Z., VanWie, D.M.: Sparkjet actuators for flow control. In: Proceedings of 41st Aerospace Sciences Meeting and Exhibit (2003). doi:10.2514/6.2003-57
Hardy, P., Barricau, P., Belinger, A., Caruana, D., Cambronne, J.P., Gleyzes, C.: Plasma synthetic jet for flow control. In: Proceedings of 40th Fluid Dynamics Conference and Exhibit, AIAA-2010-5103, Chicago, IL (2010)
Leonov, S.B., Yarantsev, D., Firsov, A., Falempin, F., Goldfeld, M.A., Pozdnyakov, G.: Plasma control of sw configuration in m = 2 inlet at off-design mode. In: Proceedings of 43rd Fluid Dynamics Conference (2013). doi:10.2514/6.2013-3115
Leonov, S.B., Yarantsev, D.A., Gromov, V.G., Kuriachy, A.P.: Mechanisms of flow control by near-surface electrical discharge generation. In: Proceedings of 43rd Aerospace Sciences Meeting and Exhibit (2005). doi:10.2514/6.2005-780
Lin, J.C.: Review of research on low-profile vortex generators to control boundary-layer separation. Prog. Aerosp. Sci. 38(4—-5), 389–420 (2002). doi:10.1016/S0376-0421(02)00010-6
Lina, L.J., Wilmer H. Reed, I.: A preliminary flight investigation of the effects of vortex generators on separation due to shock. In: Proceedings of Naca rm l50j02, Langley Aeronautical Laboratory, Langley, VA (1950)
Mallinson, S.G., Reizes, J.A., Hong, G., Buttini, M.: Synthetic jet actuators for flow control. In: Proceedings of Asia Pacific Symposium on Microelectronics and MEMS, International Society for Optics and Photonics, pp. 146–156 (1999)
Mathews, D.C., Childs, M.E., Paynter, G.C.: Use of coles’ universal wake function for compressible turbulent boundary layers. J. Aircr. 7(2), 137–140 (1970)
McCormick, D.C.: Shock/boundary-layer interaction control with vortex generators and passive cavity. AIAA J. 31(12), 91–96 (1993). doi:10.2514/3.11323
Nagamatsu, H.T., Brower, W.B., Bahi, J.L., Ross, J.: Investigation of passive shock wave-boundary layer control for transonic airfoil drag reduction final report. In: Proceedings of technical report, Rensselaer Polytechnic Institute, Troy, NY (1982)
Narayanaswamy, V.: Investigation of a pulsed-plasma jet for separation shock/boundary layer interaction control. Ph.D. thesis, The University of Texas at Austin, Texas (2010)
Narayanaswamy, V., Raja, L.L., Clemens, N.T.: Characterization of a high-frequency pulsed-plasma jet actuator for supersonic flow control. AIAA J. 48(2), 297–305 (2010)
Narayanaswamy, V., Raja, L.L., Clemens, N.T.: Control of unsteadiness of a shock wave/turbulent boundary layer interaction by using a pulsed-plasma-jet actuator. Phys. Fluids 24, 076101 (2012)
Raghunathan, S.: Passive control of shock-boundary layer interaction. Prog. Aerosp. Sci. 25, 271–296 (1988)
Samimy, M., Adamovich, I., Webb, B., Kastner, J., Hileman, J., Keshav, S., Palm, P.: Development and characterization of plasma actuators for high-speed jet control. Exp. Fluids 37, 577–588 (2004). doi:10.1007/s00348-004-0854-7
Selig, M.S., Smits, A.J.: Effect of periodic blowing on attached and separated supersonic turbulent boundary layers. AIAA J. 29(10), 1651–1658 (1991)
Settles, G.S., Fitzpatrick, T.J., Bogdonoff, S.M.: Detailed study of attached and separated compression corner flowfields in high reynolds number supersonic flow. AIAA J. 17(6), 579–585 (1979). doi:10.2514/3.61180
Settles, G.S., Vas, I.E., Bogdonoff, S.M.: Details of a shock-separated turbulent boundary layer at a compression corner. AIAA J. 14(12), 1709–1715 (1976)
Souverein, L.J., Debiève, J.F.: Effect of air jet vortex generators on a shock wave boundary layer interaction. Exp. Fluids 49, 1053–1064 (2010). doi:10.1007/s00348-010-0854-8
Srinivasan, K.R., Loth, E., Dutton, C.J.: Aerodynamics of recirculating flow control devices for normal shock/boundary-layer interactions. AIAA J. 44(4), 751–763 (2006)
Sun, C.C., Childs, M.: Wall-wake velocity profile for compressible nonadiabatic flows. AIAA J. 14(6), 820–822 (1976)
Sun, C.C., Childs, M.E.: A modified wall wake velocity profile for turbulent compressible boundary layers. J Aircr. 10(6), 381–383 (1973)
Szwaba, R., Flaszynski, P., Szumski, J., Telega, J.: Shock wave-boundary layer interaction control by air-jet streamwise vortices. In: Proceedings of the 8th International Symposium on Experimental and Computational Aerothermodynamics of Internal Flows, ISAIF8-0035 (2007)
Reedy, T.M., Kale, N., Dutton, J., Elliott, G.: Experimental characterization of a pulsed plasma jet. In: Proceedings of 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition (2012). doi:10.2514/6.2012-904
Utkin, Y.G., Keshav, S., Kim, J.H., Kastner, J., Adamovich, I.V., Samimy, M.: Development and use of localized arc filament plasma actuators for high-speed flow control. J. Phys. D Appl. Phys. 40, 685–694 (2007)
Viswanath, P.R.: Shock wave turbulent boundary layer interaction and its control: a survey of recent developments. Sadhana 12, 45–104 (1988)
Webb, N., Clifford, C., Samimy, M.: Preliminary results on shock wave/boundary layer interaction control using localized arc filament plasma actuators. In: Proceedings of 41st AIAA Fluid Dynamics Conference and Exhibit (2011). doi:10.2514/6.2011-3426
Webb, N., Clifford, C., Samimy, M.: Control of oblique shock wave-boundary layer interactions using plasma actuators. In: Proceedings of 6th AIAA Flow Control Conference (2012). doi:10.2514/6.2012-2810
Zaidi, S.H., Smith, T., Macheret, S., Miles, R.B.: Snowplow surface discharge in magnetic field for high speed boundary layer control. In: Proceedings of 44th AIAA Aerospace Sciences Meeting and Exhibit (2006). doi:10.2514/6.2006-1006
Acknowledgments
This work was funded by AFRL through an SBIR contract with Creare, Inc.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by F. Lu and A. Hadjadj.
Rights and permissions
About this article

Cite this article
Greene, B.R., Clemens, N.T., Magari, P. et al. Control of mean separation in shock boundary layer interaction using pulsed plasma jets. Shock Waves 25, 495–505 (2015). https://doi.org/10.1007/s00193-014-0524-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00193-014-0524-5