
Abstract
The establishment of a national gravity standard based on international metrological standards is a high priority for the Estonian geodetic, geophysical, and metrological community. With the presently available gravimetric instruments and models, geoscientific research at the level of \(10^{-9}\) g is possible and requires a homogeneous performance of the definition of gravity standards and of measurements of gravity values at the regional to global scale. From 1995 to 2017, five absolute gravimetric measurement campaigns have been carried out to determine the absolute value of gravity acceleration at all of the seven Estonian gravity network points by deploying JILAg, FG5, and FG5X gravimeters. In this study, the absolute gravity (AG) data were collected and reprocessed to unify the corrections due to local vertical gravity gradient, the self-attraction, and diffraction of the absolute gravimeter. The full set of gravity observations was used to estimate the rates of secular gravity change on the periphery of the Fennoscandian postglacial rebound area, which is continuously deforming due to the glacial isostatic adjustment (GIA). The observed gravity rates, which have been estimated using a linear regression model, differ from the gravity rates that are derived from the vertical velocities of the continuous Global Navigation Satellite System (GNSS) stations and the land uplift model NKG2016LU of the Nordic Commission of Geodesy (NKG) for northern Europe. These differences could be the effect of an insufficient amount of data, seasonal, and inter-annual variation in the hydrology on the observed gravity rates, and the offsets of gravimeters. The discrepancies, nevertheless, are within the uncertainties of observed and derived gravity rates. Similarly, an estimated slope of a linear relation between observed gravity rates and vertical velocities is consistent with a GIA model prediction. The effect of possible offsets of gravimeters on Estonian AG data was corrected, based on the results of international comparisons of absolute gravimeters, as well as the regional analysis of Finnish AG data. The linear regression with corrected data did not improve the fit with the rates that were based on vertical velocities. Further, the linear relation between observed gravity and uplift rates deviated more from the GIA prediction. Therefore, our results did not confirm the positive effect of gravimeter offset correction. However, in order to potentially obtain conclusions that are more solid, the absolute gravity measurements should be continued in Estonia to combine longer and denser gravity time series with the modelling of environmental effects (e.g. regional hydrology, the loading of Baltic Sea). This would allow to improve the accuracy of the national gravity frame and observed gravity rates which, in turn, would support the establishment and extension of the International Gravity Reference Frame (IGRF) in the Nordic–Baltic region by following the internationally agreed rules and recommendations of the new global gravity standard.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Over the last half century, the absolute value g of gravity acceleration \(\varvec{g}\) (the \(l_2\) norm \(g= \left\| \varvec{g} \right\| \) of vector \(\varvec{g}\) along the local vertical) on the Earth’s surface has been determined by using ballistic absolute gravimeters on the basis of laser interferometry. The accuracy of absolute gravity (AG) determinations with free-fall gravimeters has evolved from an uncertainty of a few hundred nm/s\(^{2}\) to a greater accuracy of about 20 nm/s\(^{2}\) for contemporary instruments (Torge 1989; Wilmes et al. 2016).
Since the 1990s, the establishment of a fundamental national gravity standard, based on international metrological standards, has been a high priority for the Estonian geodetic, geophysical, and metrological community. Given the rapid progress in absolute gravimetry starting in the 1970s, new national gravity networks are not referred to legacy reference systems such as international gravity standards (first the Potsdam System and then the International Gravity Standardization Net 1971) but are established independently of such systems by using absolute gravimetry. The international comparisons of absolute gravimeters then guarantee the metrological quality of the patchwork that is thus created. With the presently available gravimetric instruments and models for tidal and atmospheric corrections, geoscientific research at the level of \(10^{-9}\) g is possible and requires a homogeneous performance of the definition of gravity standards and of measurements of g-values at the regional, continental, and global scale. As a straightforward approach, the Estonian gravity standard would support the establishment of the International Gravity Reference Frame (IGRF) in the Nordic–Baltic region by following the internationally agreed rules and recommendations of the new global gravity standard, see, e.g. Wziontek et al. (2021). This will allow to monitor and study the postglacial rebound in Estonia with a long-term stable global reference.
In Estonia, the first absolute gravity determination by a free-fall gravimeter was performed in 1975, when the country was still part of the Union of Soviet Socialist Republics (USSR). A special reference point of the USSR gravity network with a massive concrete pier was constructed in Tallinn, the capital of Estonia (Sildvee 1998; Ellmann et al. 2009). The ballistic GABL gravimeter of the Institute of Automation and Electrometry of the Siberian Branch (USSR Academy of Sciences) was used to determine gravity accelerations with a standard uncertainty of 250 nm/s\(^{2}\) (Arnautov et al. 1977). Today, this campaign and its results are of historical interest only. This is because not all of the necessary information about the measurements and results (e.g. the exact location of gravimeter, determined gravity value) are known, which is probably due to the confidentiality restrictions on gravity determinations in the USSR at that time (Oja 2007). Different AG values for the Tallinn site can be found from research by Sildvee (1998) but to date the original sources of these values are unconfirmed (Oja 2007).
After the restored independence of Estonia in 1991, the restrictions on gravimetric results were lifted and since then new AG measurements have been undertaken to establish the nationwide gravity reference frame (Sildvee 1998; Oja 2012). More AG campaigns have been repeated as a result of the international cooperation between the Northern European countries (coordinated by the Nordic Geodetic Commission—NKG) to monitor geodynamic signal due to the glacial isostatic adjustment (GIA) in Northern Europe (Timmen et al. 2006, 2012; Bilker-Koivula et al. 2008, 2015; Olsson et al. 2019).
This study focuses on all AG sites that were occupied and measurements that were taken in Estonia from 1995 to 2017, with the aim of reprocessing observation data, and compiling and analysing AG data for estimating secular gravity changes. It extends the information found in the joint Nordic–Baltic AG paper of Olsson et al. (2019) by increasing the number of Estonian AG sites, re-evaluating the vertical gravity gradient, and extending the AG data series with new measurements in 2017. The fitted gravity rates are compared with the rates derived from the vertical velocities of the permanent Global Navigation Satellite System (pGNSS) stations, and the Nordic–Baltic land uplift model NKG2016LU. Similar to the previous studies (see, e.g. Olsson et al. 2016; Smith 2018; Bilker-Koivula et al. 2021), the AG data are also corrected for the offsets of absolute gravimeters based on the results of international, regional, and local comparisons. The effect of corrected offsets on fitted gravity rates is evaluated by comparing the fitting results with the output of the NKG2016LU and GIA models.
2 Land uplift and gravity change
According to the regional land uplift model NKG2016LU (Vestøl et al. 2019) and the relation between uplift rates \({\dot{h}}\) and gravity rates \({\dot{g}}\) found by Olsson et al. (2015), values from \(-0.5\) to \(-6\) nm/s\(^{2}\) per yr for \({\dot{g}}\) can be predicted over the Estonian territory (Fig. 1).
The model NKG2016LU resulted from a joint NKG cooperation project of Nordic and Baltic countries and was released in 2016 (Vestøl et al. 2016). The NKG2016LU combines the geodetic data with the geophysical GIA model (see Steffen et al. 2016) by using the least squares collocation (LSC) method (Vestøl et al. 2019). The geodetic data consist of the radial velocities and uncertainties of pGNSS stations in the International Terrestrial Reference Frame 2008 (ITRF2008) and repeated levelling data.
The uplift velocities of five Estonian pGNSS stations (SUR4, TOIL, TOR2, AUDR, KURE) that were used in the modelling were estimated from the analysis of 3D position time series (Kierulf et al. 2014; Vestøl et al. 2019). The repeated levelling data of the Estonian height network that were used in the compilation of NKG2016LU have been reviewed by Kall et al. (2014). Accordingly, the NKG2016LU model in Estonia has been constrained rather well with precise geodetic data. The NKG2016LU uplift rates for Estonian AG sites are given in Table 1.
The NKG land uplift model is comprised of two versions: (1) NKG2016LU_lev relative to the geoid surface as measured by levelling, and (2) NKG2016LU_abs relative to the ITRF2008 as observed by GNSS. Out of the two models, the latter is used in the sequel, as it provides the absolute land uplift which is useful in comparison with observed gravity rates relative to the mass centre of the Earth system (CM), including the solid earth, oceans, and atmosphere. Another beneficial component of the NKG2016LU model is a land uplift uncertainty grid which is estimated from the propagation of uncertainties of input observation data and the GIA model through the least squares collocation method (Vestøl et al. 2019).
The conversion of the NKG2016LU_abs land uplift \({\dot{h}}_\mathrm {lu}\) values (with unit mm/yr) to the gravity rate of change \({\dot{g}}_\mathrm {lu}\) (nm/s\(^{2}\) per yr) was performed by using
where the parameters \({\dot{g}}_{0} = 0.3\) nm/s\(^{2}\) per yr and \(C = -1.63\) nm/s\(^{2}\) per mm were derived from the geophysical GIA modelling in Fennoscandia (Olsson et al. 2015) and describes the relationship between \({\dot{g}}\) and \({\dot{h}}\). It is noteworthy that a similar conversion of NKG2016LU_abs to the gravity rate model, named as NKG2016LU_gdot by Olsson et al. (2019), was undertaken without the constant term in Eq. (1). However, for practical purposes, Eq. (1) with or Eq. (1) without constant term are identical.

Contour lines presenting secular gravity change \({\dot{g}}\) [nm/s\(^{2}\) per yr] in Northern Europe from the land uplift model NKG2016LU_abs (Vestøl et al. 2019) and from the modelled relation between gravity rates and vertical rates by Olsson et al. (2015), see Eq. (1). Absolute gravity sites in Estonia are depicted by blue squares
The uncertainty of gravity rate predicted from the NKG2016LU_abs through Eq. (1) can be estimated by
where \(u({\dot{h}}_\mathrm {lu})\) is computed from the aforementioned NKG2016LU uncertainty model. The component u(C) in Eq. (1) was estimated to be \(\pm 0.10\) nm/s\(^{2}\) per mm. We determined this estimate by analysing the variability of C values over the thousands of GIA model predictions made by Steffen et al. (2018). This uncertainty is slightly smaller than the value of \(\pm 0.16\) nm/s\(^{2}\) per mm that was used by Olsson et al. (2019).
The last term in Eq. (2) is further expanded
to include the uncertainties due to the drifting scale (\(\pm 0.3\) mm/yr) and origin (\(\pm 0.5\) mm/yr) of the terrestrial reference frame ITRF2008, in accordance to Collilieux et al. (2014).
In addition to the uplift rates \({\dot{h}}_\mathrm {lu}\) from the model NKG2016LU, we will use observed uplift rates \({\dot{h}}_\mathrm {gnss}\) at pGNSS stations (Sect. 3). The prediction of gravity rates \({\dot{g}}_\mathrm {gnss}\) from \({\dot{h}}_\mathrm {gnss}\) is made with the constants of Eq. (1). Similarly, change subscripts “lu” to “gnss” in Eq. (2) to obtain the uncertainty \(u({\dot{g}}_\mathrm {gnss})\) of \({\dot{g}}_\mathrm {gnss}\) from \({\dot{h}}_\mathrm {gnss}\) and its uncertainty \(u({\dot{h}}_\mathrm {gnss})\). Finally, since the \({\dot{h}}_\mathrm {gnss}\) in Sect. 3 refers to ITRF2008, the uncertainty expansion of Eq. (3) is valid for \({\dot{h}}_\mathrm {gnss}\) as well. The \({\dot{g}}_\mathrm {lu}\) and \(u({\dot{g}}_\mathrm {lu})\) together with the \({\dot{g}}_\mathrm {gnss}\) and \(u({\dot{g}}_\mathrm {gnss})\) from the preferred GNSS solution (Sect. 3) are given in Table 5.
3 Absolute gravity stations
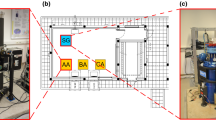
In 1994, three indoor gravimetric points (Kuressaare, Suurupi, and Tõravere) were established and secured with subsurface concrete piers that are insulated from a ground floor with \(1.2\times 1.2\) m surface size and up to a few metres of depth, cf. Fig. 2. In 2007, four additional indoor piers with similar construction were built in the public schoolhouses in Audru, Haanja, Lauka, and Toila. The massive piers are based on either limestone bedrock (Suurupi, Kuressaare, and Toila) or the layers of Quaternary deposits (Audru, Haanja, Lauka, and Tõravere on moraines) that are common in Estonia and provide stability for AG measurements. Every AG point has a metal benchmark (BM) in the middle of the pier surface to centre the AG instrument and to make the reference point available for relative gravity measurements and height determination. These BMs of AG sites were connected to the national height network by applying precise levelling during the period of 2013–2014 (Oja 2019). The seven AG points, altogether, establish the Estonian first-order (I order) gravity network that is suitable for high precision gravity determination (Fig. 3).
The NKG2016LU_abs model predictions and the uplift rates of the nearest pGNSS stations (shown in Fig. 3) together with Eq. (1) were used for the estimation of secular gravity change at gravity points. The gravity points in Audru, Suurupi, Toila, and Tõravere are co-located (within a few hundred m) with pGNSS reference stations AUDR, SUR4, TOIL, TOR2, respectively. Three of the stations (SUR4, TOIL, TOR2) belong to the EUREF Permanent GNSS Network—EPN (http://www.epncb.oma.be). The other pGNSS stations are part of the nationwide ESTPos, a network of the Estonian GNSS-RTK, operated by the Estonian Land Board (Metsar et al. 2018). For the Kuressaare AG site, the distance to the nearest pGNSS station is about 1.5 km (EPN station KURE). For Lauka and Haanja, the distance to the nearest ESTPos stations is 11.8 km (KARD) and 13.5 km (VOR2), respectively.
One of the latest velocity solutions of Estonian pGNSS stations was presented by Kall et al. (2019). Their solution was computed using a precise point positioning method in the ITRF2008 which was based on the daily series of coordinates observed from 2008 to 2016. Different regression and noise models were tested to estimate the velocities of pGNSS stations and their uncertainties. The land uplift rates of pGNSS stations in Table 1 were selected from the velocity solution “Gipsy + Hector IQ2.2” which was computed using the generalized Gauss–Markov noise model; for more details see Kall et al. (2019).

3D projection of the Suurupi pillar (left) and photograph of the FG5X#221 gravimeter on the same pillar in 2017 (right). The complex shape of the pillar is due to the subsurface massive rock (probably, a glacial erratic boulder)
The uplift rate of the Haanja AG site was estimated as the arithmetic mean of vertical velocities of the two nearest pGNSS stations VOR2 (to the NW direction) with \({\dot{h}}_\mathrm {gnss} = 0.83 \pm 0.27\) mm/yr, and MISS (17 km to SE) with \({\dot{h}}_\mathrm {gnss}=0.24 \pm 0.12\) mm/yr. MISS pGNSS station, which is operated by a private company, was included to the analysis of Kall et al. (2019). It is noteworthy that Haanja station lies approximately in the middle of a line connecting two adjacent GNSS stations, which in turn is perpendicular to the contour lines of the land uplift. Such a distribution of data points ensures the reliable interpolation of the GNSS-based uplift rate in Haanja. Further, the estimated rate is also consistent with the NKG2016LU_abs (Table 1). For the Lauka station, the GNSS-based uplift rate was not estimated. Unlike Haanja, Lauka is not surrounded by several pGNSS stations. Also, the rate \({\dot{h}}_\mathrm {gnss} = 2.56 \pm 0.19\) mm/yr estimated for KARD, the nearest GNSS station, deviates more than 1 mm/yr from the NKG2016LU_abs prediction. This seems to be an outlier and thus it is unusable in the following analysis.
The GNSS-based uplift rates \({\dot{h}}_\mathrm {gnss}\) are consistent with the predicted rates \({\dot{h}}_\mathrm {lu}\) of NKG2016LU_abs, as their average discrepancy at AG stations is only \(0.07 \pm 0.18\) mm/yr. For the gravity stations Kuressaare and Haanja, which are not co-located with pGNSS stations, the average discrepancy is 0.14 mm/yr which is also insignificantly small and refers to the reliability and usability of their GNSS-based velocity values. The coordinates and height values in Table 1 are given in the Estonian geodetic system (Estonian Ministry of Environment 2017).

First-order (I order) points of the gravity network which are suitable for precise AG determination with co-located or nearby continuous GNSS stations in Estonia. Main roads, cities in Estonia, and \({\dot{g}}\) contours (unit nm/s\(^{2}\) per yr) based on the NKG2016LU_abs model and Eq. (1) are shown in the background
3.1 Vertical gradient of gravity
At AG stations, the reduction of the gravity value along the local vertical (or the plumb line) from the observation height to the reference height level or to the BM level is needed for, e.g. the comparison of AG results or the relative gravity connections between AG stations and lower-order gravity networks, respectively.
The gravity differences along the vertical above the benchmark of Estonian AG stations were repeatedly observed by the operators of the Finnish Geospatial Research Institute (FGI), the Leibniz University Hannover (LUH), and the Estonian Land Board (ELB) by using Lacoste&Romberg (LCR G-600) and Scintrex CG3/CG5 AUTOGRAV TM (CG-3#4492, CG-5#36, CG-5#10052 and CG-5#10092) relative gravimeters from 1995 to 2017 (FGI 2003; Gitlein 2009; Oja et al. 2009).
In every station, the gravity differences between 3 or more height levels were measured with the aim to detect nonlinear gravity changes along the vertical. A second-degree polynomial model was used to approximate gravity as a function of height z:
The gravity difference between two heights \(z_1\) and \(z_2\) is then estimated by
and its standard uncertainty by
Here, u(a) and u(b) are the standard uncertainties of the estimated coefficients a and b, and \(\mathrm {Corr}[a,b]\) is the Pearson’s correlation coefficient between a and b. The coefficients and their uncertainties were estimated from a weighted least squares (WLS) adjustment on the basis of n observed gravity differences \({\Delta }g\) (Table 2). For the weights, the relation \(w = 1/[u^2({\Delta }g)]\) was used where \(u({\Delta }g)\) is the standard uncertainty of \({\Delta }g\) estimated from the processing of relative gravity data (Oja 2019).
4 Absolute gravimeters and campaigns
Three types of free-fall absolute gravimeters, JILAg (Faller et al. 1983), FG5 (Niebauer et al. 1995), and FG5X (Niebauer et al. 2011) have been used from 1995 to 2017 for the determination of gravity accelerations in Estonia. In autumn 1995, the JILAg#5 absolute gravimeter of the FGI was deployed to measure gravity in Kuressaare, Suurupi, and Tõravere (FGI 2003). In summer 2007, the LUH operators with gravimeter FG5#220 measured gravity in Suurupi and Tõravere (Timmen 2008; Oja et al. 2009). A year later, all seven first-order points were occupied by the FGI team with gravimeter FG5#221 during a monthly measurement campaign from July to August (Bilker-Koivula 2009; FGI 2009). The upgraded absolute gravimeter FG5X#221 of FGI was used in winter 2013 to measure gravity in Suurupi and again in summer 2017 at four stations: Suurupi, Toila, Tõravere, and Haanja (FGI 2017). More details about the instruments and measurement procedures used by LUH and FGI teams can be found in: Bilker-Koivula et al. (2008), Gitlein (2009), Timmen (2010), Mäkinen et al. (2016), and Bilker-Koivula et al. (2021).
For the investigation of the instruments’ long-term stability, repeatability, and traceability to the SI (International System of Units), the gravimeters JILAg#5, FG5#220, FG5#221, and upgraded FG5X#221 have been repeatedly participating in the International and European Comparisons of Absolute Gravimeters, denoted as ICAG and ECAG/EURAMET, respectively. The purpose of these comparisons was to determine the deviations of participating gravimeters (biases) from a Comparison Reference Value (CRV).
Since the ICAG2009 (with the metrological name CCM.G-K1), a Degrees of Equivalence (DoE) were introduced to describe a bias of participating gravimeters
where \(g_i\) is the gravity value measured with the gravimeter i (e.g. \(i=\) FG5#220, FG5#221, ...). Within the metrology, the DoE is used to evaluate the declared uncertainty estimates for the participating instruments or standards (Jiang et al. 2012). The DoE values, relative to the CRV with their expanded uncertainties from the comparisons that are relevant for this study and other details, are found in Table 3.
Comparison data obtained before 2009 are based on the results given by Bilker-Koivula et al. (2021, Table 2) and those include a recalculated JILAg#5 bias for the 1994 comparison. Since 2009, the DoEs and their uncertainties were collected from the reprocessed results of uniformly elaborated comparisons published by Pálinkáš et al. (2021). A solution treating all gravimeters at the same level, labelled as ICN, was used to obtain DoE values in Table 3.
The stability and repeatability of current AG meters have also been ensured through regional and local comparisons and the long time series of repeated gravity measurements at a specific reference station. The bilateral comparisons (AG instruments side by side) at FGI reference station Metsähovi and double occupations at other Finnish sites in the period of 2003–2007 have revealed the difference of \(9 \pm 27\) nm/s\(^{2}\) between the FG5#220 and FG5#221 gravimeters (Bilker-Koivula et al. 2008). A similar difference of \(4 \pm 27\) nm/s\(^{2}\) between the FG5#220 and FG5#221 gravimeters from the comparison of 15 simultaneous observations at Fennoscandian observing sites from 2003 to 2006 was found by Pettersen et al. (2010).
Before and after every AG campaign the control measurements at the reference station of FGI (at Metsähovi station in Finland) and LUH (at Clausthal or Bad Homburg in Germany) were undertaken. The difference of \(77.4\pm 7.8\) nm/s\(^{2}\) has been found between the results of the JILAg#5 and FG5 gravimeters observed at Metsähovi station in Finland (Olsson et al. 2019). The latest analysis of the absolute gravity data measured at stations in Finland revealed an offset of \(67.6 \pm 8.1\) nm/s\(^{2}\) for the JILAg#5 results with respect to the FG5 and FG5X data (Bilker-Koivula et al. 2021). The similar offset values ranging from 71 to 94 nm/s\(^{2}\) (with uncertainties from \(\pm 14\) to \(\pm 19\) nm/s\(^{2}\)) between the JILAg and FG5 gravimeters have also been estimated by Lambert et al. (2001), Timmen et al. (2008), and Pálinkáš et al. (2013).
The JILAg#5 biases estimated from the comparisons (in Table 3) are changing over the campaigns. The linear interpolation within the comparison results from 1994 to 1997 gives the bias of about 57 nm/s\(^{2}\) for JILAg#5 at the epoch of the AG campaign in 1995. The uncertainty of the JILAg#5 biases from 1989 to 1997 is about 100 nm/s\(^{2}\) (Bilker-Koivula et al. 2021), thus, these interpolated values are statistically non-significant. However, their numerical values agree with the JILAg#5 offsets given above. In conclusion, it is reasonable to consider the bias of JILAg#5 in the following analysis of AG time series.
The analysis of AG data measured in Finland also revealed a small but significant offset of \(-14.1 \pm 5.8\) nm/s\(^{2}\) for the FG5X#221 with respect to the results of FG5 gravimeters (Bilker-Koivula et al. 2021). No deviation between the FG5 and FG5X results has been found in the analysis of reprocessed comparisons from 2009 to 2018 (Pálinkáš et al. 2021), as the conclusions of those authors were that FG5 and FG5X data sets show high levels of consistency and are described with a single distribution function. Further, a non-significant offset between the FG5#221 and FG5X#221 can be concluded, based on the DoEs presented in Table 3. However, for testing purposes, the offset of FG5X#221 that was found in the latest analysis of Finnish AG data as well as DoE values in Table 3 are later used to correct AG data for possible biases in the following analysis.
There are still open questions regarding the long-term stability of a metrological reference based on Comparison Reference Values (CRVs). These include, e.g. the dependence of the CRV on the participating instruments and the dominance of FG5/FG5X instruments, the changing design and processing of the comparisons in time and the incompatible uncertainties of DoE. Several of these questions have been addressed and solved by the uniform analysis of Pálinkáš et al. (2021).
5 Absolute gravity data processing and results
During the measurement campaigns in Estonia, the number of free-fall experiments (drops) that were mainly taken within 2 or 3 days, varied from 2000 to 4496 per station determination (Table 4). The JILAg#5 interferometric data were first processed using the software provided with the gravimeter. The drop-by-drop results were then post-processed using software that was developed at the FGI. The FG5 interferometric data were processed using the Micro-g LaCoste “g” Absolute Gravity Data Acquisition and Processing Software (Micro-g LaCoste 2012).
Several reductions were made to transform the time variable acceleration of free fall to the acceleration of gravity. The final g-value of a station determination is an average result that is valid for the occupation period on each absolute point. The International Absolute Gravity Basestation Network (IAGBN) processing standards (Boedecker 1988, 1993), created within the Working Group II (World Gravity Standards) of the International Gravity Commission (IGC) and de facto standards in geodesy, were followed in data processing, i.e. the standard processing methods and the models were generally used to reduce the effects of tides, polar motion, and air pressure variations. Some specific details about the tidal correction are, nonetheless, given below.
For the solid Earth tides reduction, the Wahr–Dehant–Zschau tidal model (Wahr 1981; Dehant 1987; Zschau and Wang 1987; Dehant and Zschau 1989), the Tamura (1987) potential development and the PREM Earth model, as implemented in the ETERNA program package (Wenzel 1996) are embedded in the “g” software by the Micro-g LaCoste (Micro-g LaCoste 2012) that was used for the FG5 and FG5X gravimeters. For ocean tides, the FES2004 model (Lyard et al. 2006) in “g” was used for the FG5#221 and FG5X#221. In Timmen and Wenzel (1995), the solid Earth tides and the ocean tides by Schwiderski (1980) are already combined and available in a worldwide \(1^\circ \times 1^\circ \) grid. The grid was used by the LUH group to interpolate the tidal parameters for the FG5#220 data processing. It was also used by the FGI for the JILAg#5, with ETERNA. For the Fennoscandian area, numerical testing of the slightly different models of tidal parameters, as applied to the JILAg and the FG5 observations, showed a sufficient agreement and are ensuring a consistency within a very few nm/s\(^{2}\) for the final gravity results.
No correction was made for global and local water storage, mass distribution of the Baltic Sea, non-tidal ocean loading, and the postglacial rebound. The measurement procedures, methods, and the data processing undertaken by the LUH and FGI teams are reviewed in detail by FGI (2003, 2009, 2017), Gitlein et al. (2008), Bilker-Koivula et al. (2008), Timmen (2010), and Mäkinen et al. (2016).
The results of JILAg#5 were corrected for the recoil effect (Klopping et al. 1991). The results of FG5 and FG5X (but not JILAg) presented in this study were corrected due to the diffraction (Van Westrum and Niebauer 2003) and the self-attraction effects (Niebauer et al. 1995, 2013). The combined correction used in this study was \(12.0-14.8=-2.8\) nm/s\(^{2}\) for FG5#220, \(13.7-14.8=-1.1\) nm/s\(^{2}\) for FG5#221 and \(14-11.7=2.3\) nm/s\(^{2}\) for FG5X#221, as a sum of the diffraction and the self-attraction corrections, respectively.
For all of the AG results, height-dependent gravity corrections dg, by using Eq. (5) with the parameters from Table 2, were applied to convert gravity values along the vertical from the mean effective height to the reference height level at 120 cm above the BM (Table 4).
The combined standard uncertainties (\(u_{\mathrm {st}}\) values in Table 4) come from detailed uncertainty budgets for FGI instruments JILAg#5, FG5#221, and FG5X#221 (FGI 2003, 2009, 2017). They include both the instrument and the site-dependent uncertainties. For the LUH gravimeter FG5#220, the value \(\pm 25\) nm/s\(^{2}\), which coincides with the FG5#221 uncertainty (in 2008), was used to estimate the combined standard uncertainty shown in Table 4.
The gravity values and their uncertainties presented in Table 4 differ from the original published results and the values published in Olsson et al. (2019). The differences result from the re-evaluation of the vertical gravity gradient, and the diffraction and self-attraction corrections of the FG5 instrument. However, these differences are rather insignificant, mostly below \(\pm 5\) nm/s\(^{2}\). Only one observation made in Tõravere in 1995 produced a larger deviation compared to that described by Olsson et al. (2019): the result presented in the present study is 8 nm/s\(^{2}\) lower due to the higher value of the height correction from the mean effective height to the reference height.

Absolute gravity data measured at the first-order stations of the Estonian gravity network from 1995 to 2017, fitted with a linear regression model by applying the weighted least squares method. The standard deviation of unit weight (\({\hat{s}}_0\)) was evaluated separately. The gravity rates from the NKG2016LU_abs and nearby pGNSS stations are found in Table 5, the standard uncertainties are from Table 4, and the \(1\sigma \) confidence intervals of the fitted linear model are also shown
6 Gravity rates and relationship between \({\dot{g}}\) and \({\dot{h}}\)
Observed gravity rates at each station were calculated by fitting a linear regression model to the repeated AG observations. Three fits were performed: \({\dot{g}}_\mathrm {1}\) uses \(g_{120}\) values from Table 4. To check the effect of possible offsets of gravimeters on rate estimation, two additional fits were performed. For the solution \({\dot{g}}_\mathrm {2}\) the \(g_{120}\) values were corrected for offsets \(67.6 \pm 8.1\) nm/s\(^{2}\) of JILAg#5 and \(-14.1 \pm 5.8\) of FG5X#221 that were found by Bilker-Koivula et al. (2021). For the solution \({\dot{g}}_\mathrm {3}\) the \(g_{120}\) values were corrected using the DoE values in Table 3, as explained in Sect. 4. The fitting solutions are presented in Table 5 and the differences between the fitted and the GNSS-based gravity rates are shown in Fig. 6. A similar comparison with the NKG2016LU_abs derived rates gives practically the same distribution and, thus, is shown in the electronic Supplementary Material.
In fitting with the ordinary WLS method, the weights \(w = 1/u^{2}_{\mathrm {st}}\) were applied, where the standard uncertainties \(u_{\mathrm {st}}\) were taken from Table 4. The slope uncertainty of the fitted line as the square root of the diagonal element from the covariance matrix of the fitted parameters’ vector was not multiplied by the estimated standard deviation of unit weight
where \(\nu =n_{\mathrm{obs}}-2\) is degrees of freedom, \(n_{\mathrm{obs}}\) is the number of AG observations, \(\varvec{r}\) is the vector of residuals, and \(\varvec{W}\) is the diagonal weight matrix. The \({\hat{s}}_0\) was evaluated separately (cf. Fig. 4, Table 5), and the reason of such an approach was to the estimate uncertainty of the gravity rates independently of the goodness of fit. In other words, the rate uncertainty that is not scaled by \({\hat{s}}_0\) depends only on AG measurement uncertainties. Firstly, it made it possible for us to evaluate the trend model while also including the stations with 2 data points. For such stations, \(\nu = 0\) and thus \({\hat{s}}_0\) cannot be evaluated (undefined value). Secondly, \({\hat{s}}_0\) value at stations with more than two observations (Suurupi and Tõravere) helped to assess the goodness of fit. For instance, a \({\hat{s}}_0>1\) indicates other error sources in the data besides measurements errors, such as nonlinear gravity variations in time and discrepancies between AG instruments.
Based on the different solutions of fitted gravity rates (\({\dot{g}}_i\) from Table 5) and vertical velocities from the model NKG2016LU_abs and the pGNSS stations (\({\dot{h}}_\mathrm {lu}\) and \({\dot{h}}_\mathrm {gnss}\) from Table 1), the weighted orthogonal distance regression (WODR) was applied to estimate a new set of parameters for Eq. (1) by using the gmtregress software (Wessel et al. 2013). The suitability of the WODR fitting methods for the evaluation of the relation between the observed \({\dot{g}}\) and \({\dot{h}}\) has been discussed by Olsson et al. (2019, p. 1150). New values of slope C and intercept \(g_0\) estimated with WODR fitting are shown in Table 6. Two results of WODR fitting (\({\dot{h}}_\mathrm {gnss}\) vs \({\dot{g}}_\mathrm {1}\) and \({\dot{h}}_\mathrm {gnss}\) vs \({\dot{g}}_\mathrm {3}\)) are plotted in Fig. 5 to visualize the effect of gravimeter offset correction on the \({\dot{g}}\) and \({\dot{h}}\) relation. The other fitting solutions show visually similar results and thus are presented only in the electronic Supplementary Material.

Two solutions of gravity rates (\({\dot{g}}_\mathrm {1}\), \({\dot{g}}_\mathrm {3}\)) relative to the CM versus height rate \({\dot{h}}_\mathrm {gnss}\) in ITRF2008 determined from the AG measurements and pGNSS stations in Estonia, respectively. The modelled and observed curves presented by Eq. (1) and a linear regression model fitted to the measured values by using the weighted orthogonal distance regression, respectively. The uncertainties and the confidence bands are given at the one sigma level
7 Discussion
Overall, the number of gravity determinations to date is still not sufficiently satisfactory to provide significant constraints to the geophysical predictions of the land uplift. More gravity determinations are needed to strengthen the reliability of the observational gravity rates. However, at the stations with more than one measurement, a long time span is covered, enabling a first evaluation of the differences between observed and predicted gravity variations at the first-order stations of the Estonian gravity network.
A rather good agreement can be seen between the fitted gravity rates \({\dot{g}}_1\) and the rates derived from the land uplift velocities of nearby permanent GNSS stations and the NKG2016LU_abs model (Fig. 4, Table 5). All fitted and derived values are less than two standard uncertainties from each other, i.e. there are no statistically significant individual discrepancies. The fitting with AG data corrected for the instrumental offsets shows slightly reduced residuals, as \({\hat{s}}_0\) values change from 1.2–1.3 to 0.9–1.1 (Table 5). However, the discrepancy between the fitted and derived rates tends to increase with the offset correction, and only in Kuressaare do the discrepancies decrease (Fig. 6).
The results of this study (\({\dot{g}}_1\) solution) are also consistent with the rates \(-1.4\pm 3.8\) nm/s\(^{2}\) per yr in Suurupi and \(-7.2\pm 6.2\) nm/s\(^{2}\) per yr in Tõravere, as estimated by Olsson et al. (2019). The opposite sign and larger difference of rates in Tõravere apparently indicate the influence of the JILAg#5 measurement of 1995 on the fitted rates, which has now been reduced due to the additional measurement in 2017. One can argue for the complete omission of JILAg#5 observations. Without the JILAg#5 data, the fitted gravity rate (solution \({\dot{g}}_1\)) would be \(1.3 \pm 3.0\) nm/s\(^{2}\) per yr in Suurupi and \(4.1 \pm 3.1\) nm/s\(^{2}\) per yr in Tõravere. These results show a higher rate uncertainty, as well as a poorer match with the derived rates. It is also true for other gravity rate solutions, because the offset corrections for the FG5 and FG5X instruments are rather small. Accordingly, no improvement by removing the JILAg#5 data is obtained.

Distribution of differences (\(d{\dot{g}}_i = {\dot{g}}_i - {\dot{g}}_\mathrm {gnss}\)) between fitted (solutions \(i=1,2,3\)) and GNSS-based gravity rates. Bars with light, medium, and dark grey show differences \(d{\dot{g}}_1\), \(d{\dot{g}}_2\) and \(d{\dot{g}}_3\), respectively, and error bars show their combined uncertainties at the one sigma level
It is noteworthy that there are possible common-mode signals up to 60–70 nm/s\(^{2}\) which appear in 2007–2017 by following the discrepancies between the data and the rates derived from the pGNSS stations and NKG2016LU_abs model (Fig. 4). The major disturbing signal with strong seasonal and inter-annual variability is probably due to the hydrological processes, e.g. groundwater level and soil moisture variations (Mäkinen and Tattari 1988; Timmen 2010; Van Camp et al. 2017). At Metsähovi, a station in Finland with meteorological conditions similar to the Estonian AG sites, the combined analysis of time series of the superconducting gravimeter and the multiple hydrological sensors showed that the seasonal peak-to-peak variations of gravity could be about 50–60 nm/s\(^{2}\) due to the hydrology (Mäkinen et al. 2014). Metsähovi is on crystalline bedrock, and conceivably the hydrology effects at Estonian sites which are on more porous limestone and on sediments could be considerably greater. It is noteworthy that, generally, no corrections to remove that effect are made for the AG results as the data on local hydrological conditions are often limited or missing.
For the stations at or near the coast, such as Suurupi, Kuressaare, Toila, Lauka, and Audru (with the distance from a few hundred metres to 4 km from the coastline), another disturbing gravity signal stems from the non-tidal loading effect of the Baltic Sea level change. Nordman et al. (2015) modelled the time series (2008–2012) of the sea loading effect for nearly two hundred sites (including Estonian AG stations) around the Baltic Sea. According to their study, the gravity (peak-to-peak) variation in Estonia is due to the Baltic Sea loading range from \(67\,(-35 \ldots 32)\) nm/s\(^{2}\) in Kuressaare to \(21\,(-11 \ldots 10)\) nm/s\(^{2}\) in Haanja. We conclude that the sea loading effect could also be quite significant for the sites such as Haanja, about 150–200 km away from the coast.
The estimated gravity rates at coastal stations can also be affected by direct attraction and short wavelength elastic deformation from present-day GIA-induced sea level variations (Olsson et al. 2009). According to the computation of those authors, the effect on gravity rate could be \(-0.3 \ldots -0.4\) nm/s\(^{2}\) per yr at Swedish AG sites where the ratio D/10H between the distance D from the coast and height H from the sea level is below 1, i.e. \(D/10H < 1\). For the majority of Estonian AG sites, this ratio is above 1, except for the Toila site where \(D=220\) m and the ratio is 0.6. However, it is important to note that correcting for this effect would not influence the fitted results of the present study.
The fitted \({\dot{g}}_1\), observed and modelled \({\dot{h}}\) values, and the fitted WODR trend line are within \(1\sigma \) uncertainty of the modelled line in Fig. 5a, which supports the theoretical relation from the geophysical GIA model, given by Eq. (1). Yet, all of the points except Kuressaare are above the theoretical line, which would indicate that gravity is not decreasing as much as expected via the GIA process. The correction for the gravimeter offsets increased the fitted gravity rates, that is, shifted the data points upwards (Fig. 5b vs. Fig. 5a). Although the WODR goodness of fit was improved (the line is closer to the points), the deviation from the theoretical model increases. The reason for such a deviation could be a common-mode gravity increase caused by annual to decadal variations in the hydrology, as discussed above. We believe that the common-mode increase in gravity in 2007–2017 provides a plausible explanation for the mismatch between the data and the linear models. We also conclude that the results are robust with respect to the various \({\dot{g}}\) and \({\dot{h}}\) choices, presented above and in the electronic Supplementary Material.
By taking the uncertainty estimations of fitted and derived gravity rates into account, the consistency between them and the GIA model prediction can be concluded. However, temporally sparse AG measurements at Estonian gravity stations still complicate the separation of the GIA signal from other disturbing signals. The improved linear regression fitting with smaller residuals in Fig. 4 could be expected if the global and local hydrological models (see, e.g. Pálinkáš et al. 2013), in combination with GRACE satellite mission data (Luthcke et al. 2013; Szabó and Marjańska 2020) and non-tidal Baltic Sea loading model (e.g. Nordman et al. 2015), are used for data corrections in the future. Moreover, a denser sampling rate and longer time series of gravity data would improve the linear regression fit results. For instance, since 2007 the sampling interval in SUUR is 4–5 years with corresponding frequency 0.2–0.25 cpy. It is suggested to follow that or an even shorter interval between the future AG campaigns for the reliable separation of GIA-related and other signals from the observed time series of absolute gravity.
8 Summary
The free-fall acceleration of gravity data, determined at seven points of the Estonian first-order gravity network from 1995 to 2017, were collected and reprocessed to estimate gravity values with uncertainties. The reprocessing included the unified evaluation of the local vertical gravity gradient and the corrections due to the self-attraction and diffraction of the absolute gravimeter. The application of the unified corrections was necessary for the homogeneous results, which are important for the establishment of the accurate national gravity frame as well as for the geodynamical research.
The absolute gravity data at five points were analysed to estimate the long-term rate of gravity change anticipated in Northern Europe, e.g. due to the ongoing GIA process. A linear regression model was fitted with AG data to estimate observed gravity rates by using the weighted least squares method. The differences between the fitted gravity rates and the gravity rates derived from the nearby pGNSS stations and the NKG2016LU_abs model were within the range of uncertainties of these rates; and thus, these can be regarded as statistically non-significant. However, the residuals of linear regression (in Fig. 4) refer to some common-mode signals with similar temporal features in AG data which could complicate the reliable separation of GIA signal from other disturbing signals. The extended analysis with the corrections due to the instrumental offsets, revealed slightly improved fitting results with lower residuals. But, it also showed larger deviations from the derived gravity rates (from pGNSS stations and LU model) and the prediction of the GIA model. Therefore, the positive effect of instrumental offset correction is not confirmed by our study.
Other possible sources of disturbances are the hydrological mass variation and the Baltic Sea level change. The correction of these effects by using global, local hydrological, and non-tidal Baltic Sea loading models, as well as GRACE data, is critical to improve trend fitting and reduce the residuals in future research. Additionally, new AG measurements at the first-order points of the Estonian gravity network determined over the certain period of time (at least after every 4–5 years) will be necessary to improve the separation of temporal gravity variations and, thus, assure the accuracy of the national gravity frame. The advancing technology, such as quantum gravimeters would be beneficial to use for the new AG measurements. Also, the establishment of the International Gravity Reference System/Frame would be the important base for the further development of the national gravity standard. The IGRF with unified methods would also be needed to ensure a common gravity reference and the long-term stability, repeatability, and traceability (to the SI) of the different absolute gravimeters used. It would be advisable to install an additional AG site in the middle of Estonia, away from the coast (for the smaller impact of the Baltic Sea) for better spatial resolution and also distribution of absolute gravity data.
A similar conclusion was made by Olsson et al. (2019), that currently the most accurate GIA-induced gravity rates over the Nordic–Baltic postglacial rebound area (such as in Estonia) are predicted from the NKG2016LU_abs model together with the geophysical relation between land uplift and gravity change. However, the origin and scale errors of the International Terrestrial Reference Frames (ITRFs) could still add bias to these predicted gravity rates and propagate their uncertainties. Hence, the observed gravity rates are useful input data for the evaluation of ITRF error budget.
The presented AG results with unified corrections and realistic uncertainties form an initial base for the geophysical and GIA-related studies in the future. For instance, the gravity rates fitted to the homogeneous AG time series of Estonian gravity stations showed lower uncertainties and better agreement with the rates derived from GNSS measurements and the NKG2016LU_abs model than those found by Olsson et al. (2019). Furthermore, the gravity data set of this study helps to further elaborate the Estonian gravity reference frame EG2000, which is needed in high-quality applications, such as the prediction model of the gravity anomaly field (Oja et al. 2019) and the national 5 mm geoid computation (Ellmann et al. 2019).
Data availability
All data generated during the current study are available in this published article and its Supplementary Information files.
References
Arnautov G, Bulanzhe Y, Kalish E, Stus Y, Tarasjuk V (1977) The measurements of the absolute value of gravity acceleration at gravity points in Ledovo (Moscow), Tallinn, and Tbilisi. Results of high-precision gravimetric measurements pp 72–77. (in Russian)
Bilker-Koivula M (2009) FG5-221 measurements in Estonia (summer 2008). Unpublished report, Finnish Geodetic Institute, p 21
Bilker-Koivula M, Mäkinen J, Timmen L, Gitlein O, Klopping F, Falk R, Peshekhonov V (2008) Repeated absolute gravity measurements in Finland. In: Terrestrial Gravimetry: static and mobile measurements (TG-SMM2007). Proceedings of international symposium, Elektropribor, St. Petersburg, pp 147–151
Bilker-Koivula M, Mäkinen J, Ruotsalainen H, Näränen J, Timmen L, Gitlein O, Klopping F, Falk R (2015) Post-glacial rebound studies using absolute gravimetry in Finland. In: 27th Geophysics days of the geophysical society of Finland. Oulu, Finland, pp 11–12
Bilker-Koivula M, Mäkinen J, Ruotsalainen H, Näränen J, Saari T (2021) Forty-three years of absolute gravity observations of the Fennoscandian postglacial rebound in Finland. J Geodesy 95(2)
Boedecker G (1988) International absolute gravity Basestation network (IAGBN). Absolute gravity observations data processing standards station documentation. Bulletin d’information-Bureau gravimétrique international 63:51–57
Boedecker G (1993) The international absolute gravity Basestation network (IAGBN): status 1992. In: Montag H, Reigber C (eds) Geodesy and physics of the earth. IAG Symp., vol 112. Springer, Berlin, pp 61–62
Collilieux X, Altamimi Z, Argus D, Boucher C, Dermanis A, Haines B, Herring T, Kreemer C, Lemoine F, Ma C et al (2014) External evaluation of the terrestrial reference frame: report of the task force of the IAG sub-commission 1.2. In: Rizos C, Willis P (eds) Earth on the edge: science for a sustainable planet. Proceedings of the IAG General Assembly, vol 139. Springer, Berlin, pp 197–202
Dehant V (1987) Tidal parameters for an inelastic earth. Phys Earth Planet Inter 49(1–2):97–116
Dehant V, Zschau J (1989) The effect of mantle inelasticity on tidal gravity: a comparison between the spherical and the elliptical earth model. Geophys J Int 97(3):549–555
Ellmann A, All T, Oja T (2009) Toward unification of terrestrial gravity data sets in Estonia. Estonian J Earth Sci 58(4):229–245
Ellmann A, Märdla S, Oja T (2019) The 5 mm geoid model for Estonia computed by the least squares modified Stokes’s formula. Surv Rev 1–21
Estonian Ministry of Environment (2017) Geodeetiline Süsteem [Geodetic system]. Legal Acts of Estonia, Decree No. 64, Riigi Teataja I. https://www.riigiteataja.ee/akt/128102011003?leiaKehtiv. Accessed 26 Nov 2018 (in Estonian)
Faller J, Guo Y, Gschwind J, Niebauer T, Rinker R, Xue J (1983) The JILA portable absolute gravity apparatus. Bur Grav Int, Bull d’Inf 53:87–97
FGI (2003) Certification of calibration, No 6/2003. Technical report, Finnish Geodetic Institute
FGI (2009) Certification of calibration, No 4/2009...10/2009. Technical report, Finnish Geodetic Institute
FGI (2017) Measurement certificates, No 28/2017...31/2017. Finnish Geospatial Research Institute, National Standards Laboratory
Gitlein O (2009) Absolutgravimetrische Bestimmung der Fennoskandischen Landhebung mit dem FG5-220. PhD thesis, Leibniz Universität Hannover, Fachrichtung Geodäsie und Geoinformatik
Gitlein O, Timmen L, Müller J, Denker H, Mäkinen J, Bilker-Koivula M et al (2008) Observing absolute gravity acceleration in the fennoscandian land uplift area. In: Terrestrial gravimetry: static and mobile measurements (TG-SMM2007). Proceedings of international symposium, Elektropribor, St. Petersburg, pp 175–180
Jiang Z, Pálinkáš V, Arias F, Liard J, Merlet S, Wilmes H, Vitushkin L, Robertsson L, Tisserand L, Dos Santos FP et al (2012) The 8th international comparison of absolute gravimeters 2009: the first key comparison (CCM.G-K1) in the field of absolute gravimetry. Metrologia 49(6):666–684
Kall T, Oja T, Tänavsuu K (2014) Postglacial land uplift in Estonia based on four precise levelings. Tectonophysics 610:25–38
Kall T, Oja T, Kollo K, Liibusk A (2019) The noise properties and velocities from a time-series of Estonian permanent GNSS stations. Geosciences. https://doi.org/10.3390/geosciences9050233
Kierulf HP, Steffen H, Simpson MJR, Lidberg M, Wu P, Wang H (2014) A GPS velocity field for Fennoscandia and a consistent comparison to glacial isostatic adjustment models. J Geophys Res Solid Earth 119(8):6613–6629
Klopping FJ, Peter G, Robertson DS, Berstis KA, Moose RE, Carter WE (1991) Improvements in absolute gravity observations. J Geophys Res Solid Earth 96(B5):8295–8303. https://doi.org/10.1029/91JB00249
Lambert A, Courtier N, Sasagawa GS, Klopping F, Winester D, James TS, Liard JO (2001) New constraints on Laurentide postglacial rebound from absolute gravity measurements. Geophys Res Lett 28(10):2109–2112
Luthcke SB, Sabaka T, Loomis B, Arendt A, McCarthy J, Camp J (2013) Antarctica, Greenland and Gulf of Alaska land-ice evolution from an iterated GRACE global mascon solution. J Glaciol 59(216):613–631
Lyard F, Lefevre F, Letellier T, Francis O (2006) Modelling the global ocean tides: modern insights from FES2004. Ocean Dyn 56(5–6):394–415
Mäkinen J, Tattari S (1988) Soil moisture and groundwater: two sources of gravity variations. Bulletin d’information Bureau Gravimétrique International 62:103–110
Mäkinen J, Hokkanen T, Virtanen H, Raja-Halli A, Mäkinen RP (2014) Local hydrological effects on gravity at Metsähovi, Finland: implications for comparing observations by the superconducting gravimeter with global hydrological models and with GRACE. In: Gravity, geoid and height systems, IAG symposia, vol 141. Springer, Berlin, pp 275–281
Mäkinen J, Sermyagin R, Oshchepkov I, Basmanov A, Pozdnyakov A, Yushkin V, Stus YF, Nosov D (2016) RFCAG2013: Russian-Finnish comparison of absolute gravimeters in 2013. J Geodetic Sci 6:103–110
Metsar J, Kollo K, Ellmann A (2018) Modernization of the Estonian national GNSS reference station network. Geodesy Cartogr 44(2):55–62
Micro-g LaCoste (2012) g9 User’s manual. Micro-g LaCoste, Lafayette, Colorado, USA
Niebauer T, Sasagawa G, Faller JE, Hilt R, Klopping F (1995) A new generation of absolute gravimeters. Metrologia 32(3):159
Niebauer T, Billson R, Ellis B, van Westrum D, Klopping F (2011) Simultaneous gravity and gradient measurements from a recoil-compensated absolute gravimeter. Metrologia 48(1):154–163
Niebauer T, Billson R, Schiel A, van Westrum D, Klopping F (2013) The self-attraction correction for the FG5X absolute gravity meter. Metrologia 50(1):1–8
Nordman M, Virtanen H, Nyberg S, Mäkinen J (2015) Non-tidal loading by the Baltic sea: comparison of modelled deformation with GNSS time series. GeoResJ 7:14–21
Oja T (2007) Gravimeetrilised süsteemid ja võrgud Eestis: IGNS71 ja EGS ajavahemikus 1975–2007 (Gravity systems and networks in Estonia: IGNS71 and EGS from 1975 to 2007). Geodeet 35:11–20 (in Estonian)
Oja T (2012) Gravity system and network in Estonia. In: Kenyon S, Pacino M, Marti U (eds) Geodesy for planet earth, IAG symposia, vol 136. Springer, Berlin, pp 315–322
Oja T (2019) Estonian first order gravity network and solution EG2000 [Eesti I klassi gravimeetriline võrk ja EG2000 lahendus]. Report of geodetic works, Department of geodesy, Estonian Land Board, 52 p. (in Estonian)
Oja T, Timmen L, Gitlein O (2009) Determination of the gravity acceleration at the Estonian stations Suurupi and Tõravere with the absolute gravimeter FG5-220 in 2007. Geodeet 38(39):16–27 (in Estonian, abstract in English)
Oja T, Ellmann A, Märdla S (2019) Gravity anomaly field over Estonia. Estonian J Earth Sci 68(2):55–75
Olsson PA, Scherneck HG, Ågren J (2009) Effects on gravity from non-tidal sea level variations in the Baltic sea. J Geodyn 48(3–5):151–156
Olsson PA, Milne G, Scherneck HG, Ågren J (2015) The relation between gravity rate of change and vertical displacement in previously glaciated areas. J Geodyn 83:76–84
Olsson PA, Engfeldt A, Ågren J (2016) Investigations of a suspected jump in Swedish repeated absolute gravity time series. In: Earth and environmental sciences for future generations, IAG Symp., vol 147. Springer, Berlin, pp 137–143
Olsson PA, Breili K, Ophaug V, Steffen H, Bilker-Koivula M, Nielsen E, Oja T, Timmen L (2019) Postglacial gravity change in Fennoscandia-three decades of repeated absolute gravity observations. Geophys J Int 217(2):1141–1156
Pálinkáš V, Lederer M, Kosteleckỳ J, Šimek J, Mojzeš M, Ferianc D, Csapó G (2013) Analysis of the repeated absolute gravity measurements in the Czech Republic, Slovakia and Hungary from the period 1991–2010 considering instrumental and hydrological effects. J Geodesy 87(1):29–42
Pálinkáš V, Wziontek H, Val’ko M, Křen P, Falk R (2021) Evaluation of comparisons of absolute gravimeters using correlated quantities: reprocessing and analyses of recent comparisons. J Geodesy 95(2)
Pettersen BR, Bilker-Koivula M, Breili K, Engfeldt A, Falk R, Gitlein O, Gjevestad JGO, Hoppe W, Lysaker DI, Mäkinen J et al (2010) An accuracy assessment of absolute gravimetric observations in Fennoscandia. Nordic J Surv Real Estate Res 7(1):14
Schwiderski EW (1980) Ocean tides, part I: global ocean tidal equations. Part II: a hydrodynamical interpolation model. Mar Geodesy 3(1–4):161–255
Sildvee H (1998) Gravity measurements of Estonia. Finn Geodetic Inst 98:3
Smith VA (2018) Extracting geodetically useful information from absolute gravimetry at a fundamental geodetic station. PhD thesis, UCL (University College London)
Steffen H, Barletta V, Kollo K, Milne G, Nordman M, Olsson PA, Simpson M, Tarasov L, Ågren J (2016) NKG201xGIA—a model of glacial isostatic adjustment for Fennoscandia. In: Proceedings of the 2014 NKG general assembly, Göteborg, Sweden, Lantmäterirapport 2016, vol 4
Steffen H, Olsson PA, Oja T, Tarasov L (2018) Identifying characteristics of ice history models using the relation between rates of change of deformation and gravity. In: EGU general assembly conference abstracts, vol 20, p 12155
Szabó V, Marjańska D (2020) Accuracy analysis of gravity field changes from GRACE RL06 and RL05 data compared to in situ gravimetric measurements in the context of choosing optimal filtering type. Artif Satell 55(3):100–117
Tamura Y (1987) A harmonic development of the tide-generating potential. Bull d’Inf Marées terrestres 99:6813–6855
Timmen L (2008) Determination of the gravity acceleration at the Estonian stations Suurupi and Tõravere with the absolute gravimeter FG5-220 in 2007. Final report, Institut für Erdmessung (IfE), University of Hannover, 6 p
Timmen L (2010) Absolute and relative gravimetry. In: Sciences of geodesy—I: advances and future directions. Springer, Berlin, pp 1–48
Timmen L, Wenzel HG (1995) Worldwide synthetic gravity tide parameters. In: Sünkel H, Marson I (eds) Gravity and geoid, international association of geodesy symposia, vol 113. Springer, Berlin, pp 92–101
Timmen L, Gitlein O, Müller J et al (2006) Observing Fennoscandian gravity change by absolute gravimetry. In: Sansò F, Gil AJ (eds) Geodetic deformation monitoring: from geophysical to engineering roles, IAG symposia, vol 131. Springer, Berlin, pp 193–199
Timmen L, Gitlein O, Müller J, Strykowski G, Forsberg R (2008) Absolute gravimetry with the Hannover meters JILAg-3 and FG5-220, and their deployment in a Danish–German cooperation. Zeitschrift für Geodäsie, Geoinformation und Landmanagement 133(3):149–163
Timmen L, Gitlein O, Klemann V, Wolf D (2012) Observing gravity change in the Fennoscandian uplift area with the Hanover absolute gravimeter. Pure Appl Geophys 169(8):1331–1342
Torge W (1989) Gravimetry. Walter de Gruyter, Berlin, p 465
Van Camp M, de Viron O, Watlet A, Meurers B, Francis O, Caudron C (2017) Geophysics from terrestrial time-variable gravity measurements. Rev Geophys 55(4):938–992
Van Westrum D, Niebauer T (2003) The diffraction correction for absolute gravimeters. Metrologia 40(5):258–263
Vestøl O, Ågren J, Oja T, Kall T, Liepins I, Paršeliunas E, Rüdja A (2016) NKG2014LU_test - a new empirical land uplift model over Fennoscandia. In: Proceedings of the 2014 NKG general assembly, Göteborg, Sweden, Lantmäterirapport 2016, vol 4, pp 78–79
Vestøl O, Ågren J, Steffen H, Kierulf H, Tarasov L (2019) NKG2016LU: a new land uplift model for Fennoscandia and the Baltic region. J Geodesy 93(9):1759–1779
Wahr JM (1981) Body tides on an elliptical, rotating, elastic and oceanless earth. Geophys J Int 64(3):677–703
Wenzel HG (1996) The nanogal software: earth tide data processing package ETERNA 3.30. Bull Inf Marées Terrestres 124:9425–9439
Wessel P, Smith WH, Scharroo R, Luis J, Wobbe F (2013) Generic mapping tools: improved version released. EOS Trans Am Geophys Union 94(45):409–410
Wilmes H, Vitushkin L, Pálinkáš V, Falk R, Wziontek H, Bonvalot S (2016) Towards the definition and realization of a global absolute gravity reference system. In: International symposium on earth and environmental sciences for future generations. IAG Symposia, vol 147, pp 25–29
Wziontek H, Bonvalot S, Falk R, Gabalda G, Mäkinen J, Pálinkáš V, Rülke A, Vitushkin L (2021) Status of the international gravity reference system and frame. J Geodesy 95(1)
Zschau J, Wang R (1987) Imperfect elasticity in the earth’s mantle. Implications for earth tides and long period deformations. In: Kuo JT (ed) Proceedings of the 9th international symposium on earth tides, pp 605–629
Acknowledgements
Dr. Olga Gitlein is acknowledged for her contribution to the AG campaign of 2007 in Estonia. Dr. Maaria Nordman kindly shared the time series of non-tidal loading effect due to the Baltic Sea for Estonian AG stations. Five reviewers are thanked for critical reading to improve and clarify the manuscript. The figures have been generated using the GMT software (Wessel et al. 2013).
Funding
Absolute gravity measurements in 2017 were financed by the project 12220 of “SA Keskkonnainvesteeringute Keskus” (EIC, Estonia).
Author information
Authors and Affiliations
Contributions
TO initiated the work. All authors made measurements and processed data. TO and JM did the final analysis of the data and TO wrote the initial draft of the manuscript. JM, LT, and MBK commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Oja, T., Mäkinen, J., Bilker-Koivula, M. et al. Absolute gravity observations in Estonia from 1995 to 2017. J Geod 95, 131 (2021). https://doi.org/10.1007/s00190-021-01580-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00190-021-01580-y