
Abstract
At present, the BeiDou system (BDS) enables the practical application of triple-frequency observable in the Asia-Pacific region, of many possible benefits from the additional signal; this study focuses on exploiting the contribution of zero difference (ZD) ambiguity resolution (AR) to the precise point positioning (PPP). A general modeling strategy for multi-frequency PPP AR is presented, in which, the least squares ambiguity decorrelation adjustment (LAMBDA) method is employed in ambiguity fixing based on the full variance-covariance ambiguity matrix generated from the raw data processing model. Because of the reliable fixing of BDS L1 ambiguity faces more difficulty, the LAMBDA method with partial ambiguity fixing is proposed to enable the independent and instantaneous resolution of extra wide-lane (EWL) and wide-lane (WL). This mechanism of sequential ambiguity fixing is demonstrated for resolving ZD satellite phase bias and performing triple-frequency PPP AR with two reference station networks with a typical baseline of up to 400 and 800 km, respectively. Tests show that about \(90\,\%\) of the EWL and WL phase bias of BDS has a consistency of better than 0.1 cycle, and this value decreases to \(<\)80 % for L1 phase bias for Experiment I, while all the solutions of Experiment II have a similar RMS of about 0.12 cycles. In addition, the repeatability of the daily mean phase bias agree to 0.093 cycles and 0.095 cycles for EWL and WL on average, which is much smaller than 0.20 cycles of L1. To assess the improvement of fixed PPP brought by applying the third frequency signal as well as the above phase bias, various ambiguity fixing strategy are considered in the numerical demonstration. It is shown that the impact of the additional signal is almost negligible when only float solution involved. It is also shown that by fixing EWL and WL together, as opposed to the single ambiguity fixing, will leads to an improvement in PPP accuracy by about \(20.6\,\%\) on average. Attributed to the efficient resolution of EWL \(+\) WL within about 2 min in Experiment I, the 0.5 m level positioning can be achieved in 10 min for both horizontal and vertical, compared to 50 min for horizontal and 30 min for vertical by the NONE/EWL/WL fixed solution. While, for Experiment II, the improvement in the convergence can only be seen for the horizontal as the TTFF takes about 40 min for EWL and WL to be resolved.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
To establish a global navigation satellite system independently, China has been working on the development of BDS since April 13, 2007. At present, the satellite C13 is no longer working and the constellation is consisted of five Geostationary Orbit (GEO), five Inclined Geosynchronous Orbit (IGSO) and three Medium altitude Earth Orbit (MEO) satellites. Concerning the performance of BDS signals, on board atomic frequency standards, as well as its contribution to the future GNSS systems, a wide range of valuable literatures has been published (Montenbruck et al. 2010; Yang et al. 2011; Hauschild et al. 2012; Zhou et al. 2012). More recently, based on the data/products (precise orbit and clock) generated with the Multi-GNSS Global Experiment (MGEX) (Steigenberger et al. 2013) and BDS Experimental Tracking Stations (BETS) (Shi et al. 2012a), BDS has also been demonstrated as an efficient way to get reliable locations for both relative and standalone positioning throughout the Asia-Pacific region independently, and a few centimeter accuracy compared to GPS could be achieved (Shi et al. 2012b; Gu et al. 2013; Zhao et al. 2013).
One of the major feature of BDS is that it is the first constellation that offers code and phase ranging signals on up to three frequencies, i.e., 1561.098 MHz (B1), 1207.140 MHz (B2) and 1268.520 MHz (B3) for all satellites (Yang 2010; Yang et al. 2011). Although it has just begun to provide preliminary regional navigation service since 2012, considerable research efforts have already been—and are still being—made towards the optimization of triple-frequency GNSS data processing worldwide since 1997. In a quest for instantaneous ambiguity resolution (AR) in real-time without a dense terrestrial network, Forssell et al. (1997) extended the wide laning technique to bridge the large wavelength gap between code chip and carrier-phase with three hypothetical suitably spaced carrier frequencies and described the three carrier ambiguity resolution (TCAR) method. Independently, a similar strategy denoted as cascade integer resolution (CIR) for high integrity and continuity carrier-phase navigation was promoted by Enge et al. (1999), in which, the ambiguity of each combination with different wavelengths are resolved by integer rounding in cascade manner [extra wide-lane (EWL), \(\approx \)5.9 m; wide-lane (WL), \(\approx \)86 cm; mediumlane, \(\approx \)75 cm; and finally the L1]. Both TCAR and CIR methods lead to robust and fairly simple implementation under favorable environment, e.g., short baseline. However, theoretical investigation based on the least squares ambiguity decorrelation adjustment (LAMBDA) ambiguity success rate (Teunissen 1995, 1998) suggested that simultaneously ambiguity resolution for long baselines was remain time consuming (De Jonge et al. 2000). Furthermore, compared TCAR and CIR with the LAMBDA method, Teunissen et al. (2002) argued that both TCAR and CIR are designed for geometry-free model with integer bootstrapping, while LAMBDA method is the geometry-based case, thus will always outperform or at least as good as TCAR and CIR at a cost of extra computational load. Vollath (2004) presented a factorized multi-carrier ambiguity resolution (FAMCAR) algorithm for a fast float solutions, the resultant floating solution was then decorrelated and fixed by LAMBDA method. Many other researchers have develop more deeply into the problem since then, each adding their own contribution (Feng and Rizos 2005; Hatch 2006; Cao et al. 2007; Cocard et al. 2008). Notably the work of Feng (2008), in which, an optimal combination selection criteria is more generally established and a geometry-based TCAR method is proposed. Follow on with this work, Li et al. (2010) demonstrated the distance-independent AR over several minutes by using semi-generated triple-frequency GPS signals.
It was until more recently when the BDS enables the practical application of triple-frequency signals in the Asia-Pacific region, the initial assessment of BDS only baseline solution using real tracking triple-frequency data was presented, and it is demonstrated that an accuracy of about 1 cm is achieved with a baseline of 8 m (Montenbruck et al. 2013). The same baseline was then used by Odolinski et al. (2014) to demonstrate the advantage of BDS \(+\) GPS combined relative positioning over the BDS- and GPS-only solutions. Furthermore, long baselines of 20–50 km were processed with both the geometry-free and geometry-based TCAR methods by Tang et al. (2014), and the results of which suggested that the triple-frequency AR is more reliable than that of dual-frequency. Moreover, the advantages of BDS \(+\) GPS relative positioning are further confirmed by Teunissen et al. (2014) and Nadarajah et al. (2014a) in instantaneous RTK and attitude determination, respectively.
Regarding the studies above, great efforts have been focused on relative positioning using triple-frequency observable with promising results. Obviously, it is also expected that the precise point positioning (PPP) will be benefited from the additional frequency signals, especially given the numerous achievements in zero-difference (ZD) AR (Wübbena et al. 2005; Ge et al. 2008; Laurichesse et al. 2009; Geng et al. 2010; Bertiger et al. 2010; Collins et al. 2010; Landau et al. 2013; Tegedor et al. 2014a). It should be keep in mind that, though we are accustomed to denote the PPP AR as zero-difference AR, it was proven that within the context of PPP-RTK, all the single-receiver user integer ambiguities are straightforward double-difference ambiguities theoretically (Teunissen and Khodabandeh 2014). Concerning multi-frequency PPP-RTK, there is only a limited number of studies (Tegedor et al. 2014b; Li et al. 2014a). To evaluate the phase bias estimate and PPP AR of multiple Galileo signals, ionosphere-free mixed code-carrier combinations as well as uncombined phase and code observable were analyzed by Henkel and Günther (2008) using simulated measurements, and the results demonstrated that the accuracy of bias estimate can be further improved by an additional ionosphere-free L1-E5 mixed code-carrier combination. Further study concerning multi-frequency PPP AR was published by Geng and Bock (2013), in which GPS triple-frequency signals were simulated with and without multipath effects. By resolving the EWL and WL ambiguity, they formulated an ambiguity-fixed ionosphere-free (AFIF) measurement to assist narrow-lane ambiguity resolution and argued that real-time triple-frequency PPP has the potential to achieve ambiguity-fixed solutions within a few minutes by this method.
However, on the one hand, those studies were all conducted with simulated signals; on the other hand, though the theory for multi-frequency PPP ambiguity resolution should apply properly well to all systems, the conclusions of Galileo and GPS can be hardly applied to BDS directly due to the different data (observable and orbit/clock products) quality as well as the different orbit design (only 3 MEO satellite available currently). As a result, this paper presents the first experiment of BDS triple-frequency PPP AR with real tracking observable, while, to fully evaluate the performance of BDS positioning, dual-frequency PPP-AR are also included in the demonstration. This paper is organized as follows: firstly, the raw data processing model with ionosphere constraints is formulated to produce float solution. Afterwards, the approach of phase bias separation from a reference network is introduced and the ambiguity resolution strategy suggested in this study is described. Finally, the triple-frequency BDS phase bias is generated and assessed by comparison with GPS. The efficiency of the fixing strategy and phase bias products is then confirmed by PPP-AR in terms of accuracy and convergency.
2 Method
2.1 Float solution
Typically, the linear combination known as ionosphere-free (IF) that formulated for dual-frequency observable is enabled in PPP applications (Zumberge et al. 1997; Kouba and Héroux 2001). However, to access the true capabilities of the multi-frequency GNSS environment, an alternative approach for GNSS analysis is to employ the raw signal of each frequency as independent observable (Schönemann et al. 2011; Gu et al. 2013).
The raw observable of the GNSS pseudo-range and carrier-phase are expressed as
in which, \(P_{r,f}^s\), \(\Phi _{r,f}^s\) are pseudo-range and carrier-phase on frequency f from receiver \(r (r=1,\ldots ,i)\) to satellite \(s (s=1,\ldots ,j)\) in length units, respectively; where i is the number of receivers involved, and j is the number of satellites being tracked; \(\rho \) is the geometric distance, while antenna phase center corrections should be applied to P, \(\Phi \) before \(\rho \) becomes unassociated with the frequency; \(t_r\) is the receiver clock error; \(T_z\) is the zenith tropospheric delay that can be convert to slant with the mapping function \(\alpha \); b is the frequency dependent signal delay for receiver and satellite, respectively; N is the float ambiguity and \(\varphi \) is the phase windup error in cycle, together with the corresponding wavelength \(\lambda \); I denotes the line-of-sight total electron content with the frequency dependent factor \(\beta _f=40.3/f^2\). Note that the satellite clock term is not presented since the corresponding precise clock products are held fixed in this study.
Regarding the signal delays, since \(b_{r,f}\) and \(b_f^s\) (\(f=1,2,3\)) are linear dependent, it is assumed that
to make it uniquely solvable (Fig. 1). The first \(r+s\) constrains are introduced to separate clocks from code biases for receiver and satellite, respectively; while, the following 2 constrains are introduced to eliminate the linear dependence of code bias between receiver and satellite for frequency 2 and 3, respectively. These \(r+s+2\) equations together form the minimum constrains for the network multi-frequency GNSS code bias and satellite clock solution based on raw observable (Gu et al. 2013). And it was proven that, in this case, \(-b_2^s\) and \(-b_3^s\) are actually known as Differential Code Bias (DCB) in International GNSS Service (IGS) working groups (Gu et al. 2013; Gu 2013). Since only UPD and PPP-RTK solution are discussed in this work, for more details regarding these constrains we refer to Gu et al. (2013) and Gu (2013). Concerning the DCB estimation of BDS satellites, a wide range of publications has been written, and it is demonstrated that the BDS DCB can be corrected with a precision of about 0.5 ns (Jiao et al. 2012; Gu et al. 2013; Li et al. 2014b).

Distribution of the Experiment I network with four stations in red for phase bias estimation, while two stations in green for positioning

Distribution of the Experiment II network with ten stations in red for phase bias estimation, while eight stations in green for positioning
Furthermore, proper constraints can be applied to the ionosphere delay terms \(I_r^s\) to improve the performance of solution as proposed by Shi et al. (2012c):
where \(I(z)_r^s\) is the vertical total electron content of the ionosphere pierce point (IPP); \(\gamma \) is the mapping function as used by Schaer (1999); \(a_i(i=0,1,2,3,4)\) describes the deterministic behavior of the ionospheric delay using a polynomial function; while the scalar field \(r_r^s\) represents the stochastic component from a second-order stationary process; \(dL(_r^s), dB(_r^s)\) are the longitude and latitude difference between the IPP and the approximate location of station, respectively. Through decomposition into functional and stochastic terms, more precise constraints can be applied into the corresponding parameters as discussed in details in the previous study of involving authors (Shi et al. 2012c). \(\widetilde{I}(z)_r^s\) is the vertical ionosphere delay correction interpolated from Global Ionosphere Map (GIM) (Schaer 1999) or an available regional ionosphere model (Yao et al. 2013) with the corresponding noise \(\varepsilon _{\widetilde{I}(z)_r^s}\).
From the above discussion, the satellite bias terms \(b_f^s\) can be corrected from external sources and omitted from Eq. (1). Furthermore, substituting Eqs. (3) and (4) into Eq. (1), the PPP model based on raw observable can be written as follows:
Furthermore, we supposed that all these observable are uncorrelated, thus the corresponding stochastic model can be expressed as:
in which, the \(1\mathrm{e}^{-4}\) comes from the fact that the precision of phase is 100 times better than that of pseudo-range. \(\sigma _0^2\) and \(\sigma _\mathrm{I}^2\) are the variance of pseudo-range and ionosphere observable, respectively. In this study, \(\sigma _0\) is set as 0.2 m, and \(\sigma _\mathrm{I}\) is obtained from the a priori ionosphere model, e.g., GIM. Obviously, Eqs. (5) and (6) present a model which is navigation system independent (suitable for GPS, GLONASS, BDS, Galileo, etc.) and frequency number unrelated (suitable for single-frequency, dual-frequency, triple-frequency, etc.). By solving Eqs. (5) and (6), the ambiguity/UPD terms, coordinate, ionosphere/troposphere delays, receiver clock errors as well as receiver code biases can be determined by using the square root information filter (SRIF).
2.2 Phase bias and ambiguity resolution
To perform PPP AR, the float ambiguity N should be further formulated as
to generate the phase bias of both receiver and satellite, i.e., \(d_r\) and \(d^s\). n is the integer ambiguity which is usually determined by integer-rounding.
Instead of extracting the phase bias from the original float ambiguities \(N_f (f=1,2,3)\), the integer transformation \(Z_{\mathrm{trans}}\) is usually applied to retrieve the EWL (\(\lambda _{\mathrm{EWL}}\approx 102.5~\mathrm{cm}\)), WL (\(\lambda _{\mathrm{WL}}\approx 84.7~\mathrm{cm}\)) and L1 (\(\lambda _{\mathrm{L1}}\approx 19.2~\,\mathrm{cm}\)) ambiguities
and then, the phase biases for EWL, WL and L1 are estimated in cascade manner. Suppose j satellites are tracked by i receivers, we have
where \(\bar{N}_{r, f}\) and \(\bar{n}_{r, f}\) are the float and integer ambiguity vectors for station r on frequency f; \(U_k\) is a \(k\times k\) identity matrix and \(u_k\) is a \(k\times 1\) vector with one entries (\(k=i,j\)); \(\otimes \) is the Kronecker product (Rao 1973); \(\bar{d}_r\) and \(\bar{d}^s\) are the phase bias vectors for station r and satellite s, respectively. Eq. (10) is the extra condition to eliminate the rank deficiency of model (9). The constrain is only applied for the first epoch in which j equals the satellite number of this epoch. Then both \(\bar{d}_r\) and \(\bar{d}^s\) are updated as random walk process with a power density of \(2\mathrm{e}^{-3}~\mathrm{cycle}/\sqrt{s}\), and thus the constrain (10) can be transferred over a multi-epoch experiment. Based on model (9) and (10), the phase bias on each frequency \(\bar{N}_{\mathrm{EWL}}, \bar{N}_{\mathrm{WL}}, \bar{N}_1\) can be derived stepwisely. More details concerning the procedure of the UPD solution, we refer to Geng et al. (2012), Teunissen and Khodabandeh (2014) and Gu et al. (2015).
For the user solution, the PPP AR can be performed with a single receiver by using the above phase biases: firstly, the float ambiguity are estimated with Eqs. (5) and (6); secondly, the integer transformation \(Z_{\mathrm{trans}}\) is applied to retrieve the EWL, WL and L1 ambiguity set; then the integer property of these ambiguity are recovered by removing the corresponding satellite phase biases; in the forth step, LAMBDA (Teunissen. 1995) method is applied to search the optimal fixed values for each subset of ambiguity; and finally, these integer ambiguity are applied as constrains to get the fixed-PPP solution.
For a reliable ambiguity resolution, the integer validation plays a crucial role. One of the earliest and most popular ways of validating the integer ambiguity solution is the so-called ratio test (Euler and Schaffrin 1991). For the PPP AR ambiguity validation, the ratio test is given by:
where \(\Vert \cdot \Vert ^2\) denotes the squared norm; n and \(n_2\) are the best and second-best integer solution; and \(Q_N\) denotes the variance-covariance matrix of float ambiguity N; \(\hat{d_r}\), \(\hat{d^s}\) are the phase bias estimates of receiver and satellite, respectively; c is the critical value for the test. Test (11) is applied to the user-end ambiguity resolution directly. While, for the network phase bias estimation of each satellite, a similar criteria is presented in this work:
in which \([\cdot ]\) denotes rounding to an integer and \(\vert \cdot \vert \) denotes taking the absolute value.
Since the float ambiguity N is estimated receiver by receiver in this study, the variance–covariance matrix is not available for the phase bias estimation, thus we assume that \(Q_N\) is an identity matrix. Under this simplification, Eq. (12) can be derived from Eq. (11) by recognizing:
with \(\mathrm{sign}(\cdot )\) is the sign of \(\cdot \) and \(\breve{N}=N+\hat{d_r}-\hat{d^s}\). Substituting Eq. (13) into Eq. (11) with \(Q_N\) the identity matrix, it follows that
which is exactly Eq. (12).
It should be noted that, a more strict test for UPD estimation is expected by applying the full variance–covariance matrix \(Q_N\). However, it involves the integrated solution of all receivers which is rather time consuming. Furthermore, concerning the critical value in the ratio test, there is more reasonable way to determine it (Teunissen and Verhagen 2009; Wang and Feng 2013b).
Though the integer transformation \(Z_{\mathrm{trans}}\) in Eq. (8) is exactly the transformation matrix used in TCAR ambiguity resolution, we employ the geometry-based model rather than the geometry-free model in the estimation; furthermore, the integer least-squares (ILS) (implemented through LAMBDA) method is used in the integer-fixing for each ambiguity subset rather than the integer-rounding. Therefore our approach will always perform better or at least as good as the traditional TCAR method (Teunissen et al. 2002). Theoretically, to achieve the highest probability of success ambiguity-fixing, ILS method should be applied as a whole since a full ambiguity variance–covariance matrix is produced with Eqs. (5) and (6) (Teunissen et al. 2002). However, as will be demonstrated in the following section, for the BDS PPP users located in a long inter-distance network (e.g., \(\ge \)400 km), the reliable resolution of their L1 ambiguity is not a easy task currently. As an alternative of resolving the complete vector of ambiguities, the subsets of EWL and WL ambiguity can still be resolved to their integer values feasibly. Thus, the method proposed in this contribution can be regarded as a special case of ILS method with partial ambiguity fixing (Teunissen et al. 1999; Wang and Feng 2013a).
3 Experiment
3.1 Software development and data collection
The Position And Navigation system Data Analyst (PANDA) software package was originally developed by Wuhan University in China since ten years ago (Liu and Ge 2003; Shi et al. 2008). At present, the PANDA software is competent for the jobs of precise orbit determination (POD) of GNSS (Li 2011) and Low Earth Orbits (Zhao 2004), satellite clock estimation (Lou 2008), precise positioning (Li et al. 2014C), GPS seismology (Shi et al. 2010; Xu et al. 2013) as well as earth gravity recovery (Zhao et al. 2011). To cope with the upcoming or available new and modernized GNSS signals, especially, the multi-frequency data processing of BDS, as well as the real-time applications, the PANDA team has launched the PANDA II project. This study presents the first result of BDS triple-frequency PPP-AR based on the PANDA II prototype software, in which, the idea of raw data processing strategy was implemented for triple-frequency ZD ambiguity fixing.
Two experiments were carried out in the following section as listed in Table 1. The BDS observable were all collected with triple-frequency Trimble NetR9 receivers acquired carrier phase and pseudorange data from the 13 available BDS satellites. In the following demonstration, the BDS UPD are extracted from the reference stations in red and compared to the GPS UPD. Based on these UPD products, the benefits of the additional signal to PPP are then illustrated with the rover stations. Precise orbit, clock as well as DCB products that generated with PANDA software based on the MGEX stations are held fixed in all of the processing. Furthermore, the ionosphere correction of GIM from CODE are applied as pseudo-observable. While concerning the integer validation, 10 is selected as the critical value for the network UPD estimation, i.e., \(\mathrm{ratio}_{\mathrm{UPD}}\ge \)10 to avoid inaccurate modeling, and the critical value for the ratio test of user-end is set as 5 in this research.
3.2 Phase bias
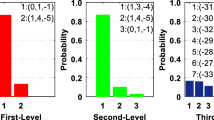
As introduced in Sect. 2.2, phase bias can be extracted from the float ambiguity. Ideally, the satellite phase bias are identical with each other among different stations, therefore, the residual distribution of Eqs. (9) and (10) provides a strong statistical test for evaluating the precision of the \(d^s\) terms (Teunissen 2002). Shown in Fig. 3 is the residual distribution of the BDS phase bias solution from the network for the experimental periods. For Experiment I, the best performance is found in the estimation of EWL phase bias, in which the RMS of residual is about 0.07 cycles, this statistic decreases by a factor of 2.9 and \(37.1~\%\) when WL and L1 involved respectively. Comparing the bottom sub-figures with the upper sub-figures, we could found that the performance of phase bias estimates decreases as the distance increases and all the solutions of Experiment II have a similar RMS of about 0.11 cycles under the condition \(\mathrm{ratio}_{\mathrm{UPD}} \ge \)10.

Residual distribution of the BDS phase bias solution for Experiment I (upper panel) and Experiment II (bottom panel). While from left to right are the distributions of the EWL solution, the WL solution and the L1 solution
Beside the consistency among different stations, the temporal behavior of phase bias provides another effective way to validate its performance. Firstly, to analyze their behavior within one day, the phase bias serial of C03 was examined in Fig. 4 as an example. As shown in Fig. 4, the phase bias of EWL and WL are not constant, but changing in time by up to about 0.3 cycles. Actually this variation exists in all the BDS satellite phase bias series as presented in Fig. 5. Since that the daily phase bias has identical tendency, presented in Fig. 5 is the 42 days average trend of EWL, WL and L1 for satellite with GEO orbit (left panel), IGSO orbit (middle panel) and MEO orbit (right panel). Similar behavior can be recognized for the EWL and WL phase bias of the same satellite. Though it remains unclear the root cause of EWL/WL phase bias anomaly, they cannot be attributed to the L1 signal since the L1 series in the bottom sub-figures do not share the same property. It is also not likely attributed to the elevation angle related errors as evidenced by Fig. 4. By comparison with the details of the satellite orbit as shown in Table 2, it is observed that this temporal variation is highly correlated with the RAAN of the satellite orbit which suggests that the phenomenon is most likely due to the orbit plane related errors.

Serial of estimated EWL phase bias (upper panel), WL phase bias (middle panel) and L1 phase bias (bottom panel) of C03 for all these 42 days of Experiment I and Experiment II, and the red line denotes the corresponding elevation angle

Average trend of estimated EWL phase bias (upper panel), WL phase bias (middle panel) and L1 phase bias (bottom panel) for GEO satellites (left panel), IGSO satellites (middle panel) and MEO satellites (right panel) for all these 42 days of Experiment I and Experiment II
Removing the average trend in Fig. 5, left and right panel of Fig. 6 present the average BDS phase bias along with its STD over the 11 days of Experiment I and 31 days of Experiment II, respectively. The green dots show the average value of the phase bias for each satellite, while the corresponding STD are presented as the error bar. Overall, the average STD are 0.060, 0.073 and 0.207 cycles for EWL, WL and L1 respectively for Experiment I, from which it is observed that the EWL and WL phase bias are rather stable over days after removing the mean trend. However, when the inter-station distance increases to about 800 km as in Experiment II, the consistency decreases to about 0.12 cycles for EWL and WL phase bias. Moreover, the gray histogram shows the number of sample involved in the statistic under the criterion (12), from which, it can be concluded that the extraction of L1 phase bias is rather difficult compared with EWL and WL, since much less product can be generated under the criterion (12). While the comparison among different satellites suggests that, the phase bias of IGSO is the easiest to be generated. On average, the pass rate of criterion (12) is 66.8, 85.8 and \(74.3~\%\) for GEO, IGSO and MEO respectively.

Statistic of the BDS phase bias solution over the 11 days of Experiment I (left panel) and 31 days of Experiment II (right panel). The green dots show the average value of the phase bias for each satellite with the corresponding STD presented as the error bar, while the gray histogram shows the number of sample involved in the statistic
As a comparison, we have also plot the corresponding statistic for the GPS solution in Figs. 7 and 8 with the same date set. Note that, the satellite G09 and G03 has not been tracked by Experiment I and Experiment II, respectively. From the results of the residual distribution as well as the temporal stability, it is informed that the overall performance of estimated phase bias can be expressed in the following inequality

Residual distribution of the GPS phase bias solution for Experiment I (upper panel) and Experiment II (bottom panel). While from left to right are the distributions of the WL solution and the L1 solution

Statistic of the GPS phase bias solution over the 11 days of Experiment I (upper two panels) and 31 days of Experiment II (bottom two panels). The green dots show the average value of the phase bias for each satellite with the corresponding STD presented as the error bar, while the gray histogram shows the number of sample involved in the statistic
3.3 PPP
In order to judge the efficiency of the BDS phase bias solution, the procedure of PPP-AR as described in Sect. 2.2 was carried out by applying the above phase bias products. The post-estimated coordinates in static mode are set as reference to assess the positioning accuracy.
Tables 3 and 4 present the averaged RMS and time-to-first-fix (TTFF) over the stations of Experiment I and Experiment II for dual- and triple-frequency PPP, respectively. In addition, to evaluate the contribution of AR on each individual lane, i.e., EWL, WL and L1, the ambiguity-fixing is performed in several model as list in the following tables. Note that, since the TTFF varies for each solution, the results presented here are all based on the whole daily session. That means, positioning of both before and after ambiguity-fixing are included in the statistic.
As shown in Table 3, ambiguity-fixing of WL can not improve the PPP accuracy in general. Furthermore, concerning the L1 ambiguity, one must be aware of that it takes more than 3 h for fixing, thus, compared with the positioning of the float solution, the contribution of additional L1 fixing is also limited.
Similar with dual-frequency PPP, several conclusions could be proposed for triple-frequency positioning: firstly, the impacts of only EWL or WL fixing on PPP solution are rather limited; secondly, though the third frequency signal can shorten the TTFF for L1 by about \(39.8~\%\), it still takes almost 3.4 h which inhibits the effect of L1 fixing. The TTFF is rather long compared to the results of GPS L1 resolution, e.g., Geng et al. (2010). Besides the different satellite orbit and station location of the observable collected, it is most likely due to the real-time processing mode of both UPD and PPP solution, and the stricter threshold for ratio test compared to three in other works.
Comparing the triple-frequency solution with dual-frequency, it is observed that the influence of the additional signal is negligible when only float solution involved. However, the average 3D RMS of triple-frequency PPP has an improvement of about \(20.6~\%\) when AR involved. Furthermore, the TTFF for triple-frequency ambiguity fixing could be shortened significantly.
In addition, the comparison between Experiment I and Experiment II suggests that: as the inter-station distance of the network decrease from about 800 to 400 km, the efficiency of EWL/WL AR can be improved significantly, i.e., from about 128 min to 5 min for dual-frequency and from 44 min to 2 min for triple-frequency. While, it is surprising to see that the L1 AR performs better for Experiment II, this conclusion, however, is not convincing since that the sample involved in the L1 AR statistic is rather limited, especially in Experiment II as indicated by Fig. 6.
Another crucial indicator of the performance of PPP is the convergence time. Figure 9 can be used to infer the averaged convergence series of a 3-h pass during the initialization, the inserted part in each panel in this figure expands the vertical scale for clarity purpose. Clearly, the performance of float and fixed dual-frequency PPP are roughly the same for both experiments. Concerning the triple-frequency PPP, the overall initialization time is significantly reduced by introducing the EWL and WL ambiguity-fixing together in Experiment I, while, for the triple-frequency PPP in Experiment II, visible improvement in convergence can be only achieved for horizontal.

Left panel average convergence serial of BDS PPP for days 185–195, 2014 over a 3-h pass of the horizontal (upper panel) and vertical (bottom panel); right panel average convergence serial of BDS PPP for days 274–304, 2014 over a 3-h pass of the horizontal (upper panel) and vertical (bottom panel). The inset in each panel expands the vertical scale for clarity purpose
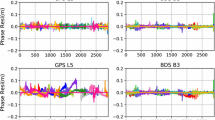
As an example, Fig. 10 compares the Up/North/East (UNE) errors of the triple-frequency float PPP and ambiguity-fixed PPP for nncg on the day 188, 2014. As expected, the ambiguity-fixed PPP is obviously superior to the float PPP solution by the efficient resolution of EWL and WL ambiguity. However, the positioning seems insensitive to the L1 ambiguity fixing after convergence in terms of precision.

Position differences in the Up (upper panel), North (middle panel), and East (bottom panel) components for station nncg on the day 188, 2014. The float solution are presented as black line, and the fixed solution are presented as red line
In summary, it is demonstrated that, the performance of BDS PPP with ambiguity resolution can be improved significantly attribute to the additional signal. However, one should always aware that concerning the practical applications, the situation is much more complex as the availability of the third BDS frequency for the general user is still not clear. Additionally, the study is based on the same type receiver, thus, the effect of mixed receiver bias on the positioning was not considered and should be investigated further (Nadarajah et al. 2014b).
4 Conclusions
This contribution has solved for the first time the triple-frequency ambiguity-fixed PPP based on the real tracking BDS observable. There are basically two steps involved in the analysis: firstly, float solution with full variance–covariance matrix of ambiguity is generated based on the raw data processing strategy; afterwards, the ILS method with partial ambiguity fixing is proposed for the fixed solution. This is important because it is noted that the quickly resolution of BDS L1 ambiguity with sufficient probability is simply not possible, thus, the partial ambiguity fixing technique enables the independent and instantaneous resolution of EWL and WL.
This mechanism of sequential ambiguity fixing is verified using six BDS stations with a typical inter-station distance of 400 km during days 185–195 in 2014, and 18 BDS stations with a typical inter-station distance of 800 km during days 274–304 in 2014. The ZD BDS phase bias are generated and evaluated in terms of residual distribution and temporal stability, and the comparison with GPS phase bias shows much promise for the EWL and WL phase bias of BDS for a network of 400 km. While the consistency and stability of L1 phase bias seems dubious at best, most likely due to problems with the BDS signal and imperfect models. Results using the phase bias indicate that compared with the dual-frequency PPP, the float solution is not significantly affected by the third frequency, furthermore, the impact of resolving the single ambiguity, e.g., EWL, WL, is almost negligible. The result of De Jonge et al. (2000) based on theoretical analysis tends to support this conclusion. While concerning Experiment I, attributed to the efficient resolution of EWL and WL ambiguity within about 2 min, the positioning accuracy is improved by about \(31~\%\) with the triple-frequency fixed PPP, and accelerates the convergence to give 0.5 m level positioning from 50 to 10 min for horizontal, and from 30 to 10 min for vertical, when compared with NONE/EWL/WL fixed solution. For Experiment II, though the resolution of EWL and WL takes about 40 min due to the longer inter-station distance, improvement can still be achieved in terms of both precision and convergence.
It should be mentioned that the study is still initial result due to the regional BDS constellation and imperfect models, and this partial ambiguity fixing does not provide the best possible precision. Apart from looking for the partial ambiguity manually, more efficient partial ambiguity resolution may be obtained by letting LAMBDA choose the best ambiguity combinations according to the correlations between ambiguities. It is expected that, benefited from the modernization of GPS and GLONASS, together with the further development of BDS and Galileo in the near future, instantaneous centimeter-level positioning could be achieved based on the multi-frequency PPP-AR for real-time applications.
References
Bertiger W, Desai S, Haines B, Harvey N, Moore Angelyn W, Owen S, Weiss J (2010) Single receiver phase ambiguity resolution with GPS data. J Geod 84(5):327–337
Cao W, Keefe K, Cannon ME (2007) Partial ambiguity fixing within multiple frequencies and systems. In: Proceedings of the 20th international technical meeting of the Satellite Division of the Institute of Navigation, pp 312–323
Cocard M, Bourgon S, Kamali O, Collins P (2008) A systematic investigation of optimal carrier-phase combinations for modernized triple-frequency GPS. J Geod 82(9):555–564
Collins P, Bisnath S, Lahaye F, Hroux P (2010) Undifferenced GPS ambiguity resolution using the decoupled clock model and ambiguity datum fixing. NAVIGATION J Inst Navig 57(2):123–135
De Jonge P, Teunissen P, Jonkman N, Joosten P (2000) The distributional dependence of the range on triple frequency GPS ambiguity resolution. In: Proceedings of the 2000 national technical meeting of the Institute of Navigation, pp 605–612
Enge P, Jung J, Pervan B (1999) High integrity carrier phase navigation for future LAAS using multiple civilian GPS signals. In: Proceedings of the American control conference, pp 3650–3654
Euler H, Schaffrin B (1991) On a measure for the discernibility between different ambiguity solutions in the static-kinematic GPS-mode. In: IAG symposia no. 107, Kinematic systems in geodesy, surveying, and remote sensing, pp 285–295
Feng Y (2008) GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals. J Geod 82(12):847–862
Feng Y, Rizos C (2005) Three carrier approaches for future global, regional and local GNSS positioning services: concepts and performance perspectives. In: Proceedings of ION GNSS, pp 2277–2787
Forssell B, Martin-Neira M, Harrisz R (1997) Carrier phase ambiguity resolution in GNSS-2. In: Proceedings of the 10th international technical meeting of the Satellite Division of the Institute of Navigation, pp 1727–1736
Geng J, Bock Y (2013) Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J Geod 87(5):449–460. doi:10.1007/s00190-013-0619-2
Geng J, Teferle F, Meng X, Dodson A (2010) Towards PPP-RTK: ambiguity resolution in real-time precise point positioning. Adv Space Res 47(10):1664–1673
Geng J, Shi C, Ge M, Dodson A, Lou Y, Zhao Q, Liu J (2012) Improving the estimation of fractional-cycle biases for ambiguity resolution in precise point positioning. J Geod 86(8):579–589
Ge M, Gendt G, Rothacher M, Shi C, Liu J (2008) Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J Geod 82(7):389–399
Gu S (2013) Research on the zero-difference un-combined data processing model for multi-frequency GNSS and its applications. PhD thesis, Wuhan University (in Chinese)
Gu S, Shi C, Lou Y, Feng Y, Ge M (2013) Generalized-positioning for mixed-frequency of mixed-GNSS and its preliminary applications. In: Proceedings of the China satellite navigation conference (CSNC), vol 102(B3), pp 5005–5017
Gu S, Shi C, Lou Y, Liu J (2015) Ionospheric effects in uncalibrated phase delay estimation and ambiguity-fixed PPP based on raw observable model. J Geod. doi:10.1007/s00190-015-0789-1
Hatch R (2006) A new three-frequency, geometry-free technique for ambiguity resolution. In: Proceedings of ION GNSS, pp 26–29
Hauschild A, Montenbruck O, Sleewaegen J, Huisman L, Teunissen P (2012) Characterization of compass M-1 signals. GPS Solut 16(1):117–126
Henkel P, Günther C (2008) Precise point positioning with multiple Galileo frequencies. In: Proceedings of IEEE/ION position, location and navigation symposium, Monterey, pp 592–599
Jiao W, Geng C, Ma Y, Huang X, Zhang H, Li M, Hu Z (2012) A method to estimate DCB of COMPASS satellites based on global ionosphere map. In: Sun J, Liu J, Yang Y, Fan S (eds) Proceedings of the China satellite navigation conference (CSNC), pp 347–353. Springer, Berlin. doi:10.1007/978-3-642-29187-6-34
Kouba J, Héroux P (2001) Precise point positioning using IGS orbit and clock products. GPS Solut 5(2):12–28
Landau H, Brandl M, Chen X, Drescher R, Glocker M, Nardo A, Nitschke M, Salazar D, Weinbach U, Zhang F (2013) Towards the inclusion of Galileo and BeiDou/compass satellites in trimble centerpoint RTX. In: Proceedings of the 26th international technical meeting of the Satellite Division of the Institute of Navigation, pp 1215–1223
Laurichesse D, Mercier F, Berthias J, Broca P, Cerri L (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navigation 56(2):135–149
Li M (2011) Research on multi-GNSS precise orbit determination theory and application. PhD dissertation, School of Geodesy and Geomatics, Wuhan University, Wuhan (in Chinese with an abstract in English)
Li B, Feng Y, Shen Y (2010) Three carrier ambiguity resolution: distance-independent performance demonstrated using semi-generated triple frequency GPS signals. GPS Solut 14(2):177–184
Li T, Wang J, Laurichesse D (2014a) Modeling and quality control for reliable precise point positioning integer ambiguity resolution with GNSS modernization. GPS Solut 18(3):429–442
Li Z, Yuan Y, Fan L, Huo X, Houtse H (2014b) Determination of the differential code bias for current BDS satellites. IEEE Trans Geosci Remote Sens 52(7):3968–3979. doi:10.1109/TGRS.2013.2278545
Li M, Qu L, Zhao Q, Guo J, Su X, Li X (2014c) Precise point positioning with the beidou navigation satellite system. Sensors 14(1):927–943. doi:10.3390/s140100927
Liu J, Ge M (2003) PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ J Nat Sci 8(2):603–609. doi:10.1007/BF02899825
Lou Y (2008) Research on real-time precise GPS orbit and clock offset determination. PhD dissertation, School of Geodesy and Geomatics, Wuhan University, Wuhan (in Chinese with an abstract in English)
Montenbruck O, Hauschild A, Steigenberger P, Hugentobler U, Riley S (2010) A COMPASS for Asia: first experience with the BeiDou-2 regional navigation system
Montenbruck O, Hauschild A, Steigenberger P, Hugentobler U, Teunissen P, Nakamura S (2013) Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut 17(2):211–222. doi:10.1007/s10291-012-0272-x
Nadarajah N, Teunissen P, Raziq N (2014a) Instantaneous BeiDou-GPS attitude determination: a performance analysis. Adv Space Res 54(5):851–862
Nadarajah N, Teunissen P, Sleewaegen J, Montenbruck O (2014b) The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut. doi:10.1007/s10291-014-0392-6
Odolinski R, Teunissen P, Odijk D (2014) First combined COMPASS/BeiDou-2 and GPS positioning results in Australia. Part II: Single- and multiple-frequency single-baseline RTK positioning. J Spat Sci 59(1):25–46. doi:10.1080/14498596.2013.866913
Rao C (1973) Linear statistical inference and its applications. Wiley, New York
Schaer S (1999) Mapping and predicting the Earth’s ionosphere using the global positioning system. Ph.D. thesis, University of Bern, Switzerland
Schönemann E, Becker M, Springer T (2011) A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J Geod Sci 1(3):204–214. doi:10.2478/v10156-010-0023-2
Shi C, Zhao Q, Geng J, Lou Y, Ge M, Liu J (2008) Recent development of PANDA software in GNSS data processing. In: Li D, Gong J, Wu H (eds) Proceedings of SPIE, the International Society for Optical Engineering, vol 7285, p 72851S. SPIE, Bellingham. doi:10.1117/12.816261
Shi C, Lou Y, Zhang H, Zhao Q, Geng J, Wang R, Fang R, Liu J (2010) Seismic deformation of the Mw 8.0 Wenchuan earthquake from high-rate GPS observations. Adv Space Res 46(2):228–235. doi:10.1016/j.asr.2010.03.006
Shi C, Zhao Q, Li M, Tang W, Hu Z, Lou Y, Zhang H, Niu X, Liu J (2012a) Precise orbit determination of Beidou satellites with precise positioning. Sci China Earth Sci 55(7):1079–1086. doi:10.1007/s11430-012-4446-8
Shi C, Zhao Q, Hu Z, Liu J (2012b) Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites. GPS Solut 1–17: doi:10.1007/s10291-012-0264-x
Shi C, Gu S, Lou Y, Ge M (2012c) An improved approach to model ionospheric delays for single-frequency precise point positioning. Adv Space Res 49(12):1698–1708. doi:10.1016/j.asr.2012.03.016
Steigenberger P, Montenbruck O, Weber R, Hugentobler U (2013) Status and perspective of the IGS multi-GNSS experiment (MGEX). In: EGU general assembly conference abstracts, vol 15, p 2558
Tang W, Deng C, Shi C, Liu J (2014) Triple-frequency carrier ambiguity resolution for Beidou navigation satellite system. GPS Solut 18(3):335–344. doi:10.1007/s10291-013-0333-9
Tegedor J, Liu X, De Jong K, Goode M, Øvstedal O, Vigen E (2014a) Estimation of Galileo uncalibrated hardware delays for ambiguity-fixed precise point positioning. In: Proceedings of the 27th international technical meeting of the Satellite Division of the Institute of Navigation, pp 2346–2353
Tegedor J, Øvstedal O, Vigen E (2014b) Precise orbit determination and point positioning using GPS, Glonass, Galileo and BeiDou. Journal of Geodetic Science 4(1):2081–9943. doi:10.2478/jogs-2014-0008
Teunissen P (1995) The least-squares ambiguity decorrelation adjustment a method for fast GPS integer ambiguity estimation. J Geod 70(1–2):65–82
Teunissen P (1998) Success probability of integer GPS ambiguity rounding and bootstrapping. J Geod 72(10):606–612
Teunissen P (2002) The parameter distributions of the integer gps model. J Geod 76(1):41–48
Teunissen P, Verhagen S (2009) The GNSS ambiguity ratio-test revisited: a better way of using it. Surv Rev 41(312):138–151
Teunissen PJG, Khodabandeh A (2014) Review and principles of PPP-RTK methods. J Geod. doi:10.1007/s00190-014-0771-3
Teunissen P, Joosten P, Tiberius C (1999) Geometry-free ambiguity success rates in case of partial fixing. In: Proceedings of ION 55th national technical meeting, pp 25–27
Teunissen P, Joosten P, Tiberius C (2002) A comparison of TCAR, CIR and LAMBDA GNSS ambiguity resolution. In: Proceedings of the 15th international technical meeting of the Satellite Division of the Institute of Navigation, pp 2799–2808
Teunissen P, Odolinski R, Odijk D (2014) Instantaneous BeiDou\(+\) GPS RTK positioning with high cut-off elevation angles. J Geod 88(4):335–350
Vollath U (2004) The factorized multi-carrier ambiguity resolution (FAMCAR) approach for efficient carrier-phase ambiguity estimation. In: Proceedings of the 17th international technical meeting of the Satellite Division of the Institute of Navigation, Long Beach, pp 2499–2508
Wang J, Feng Y (2013a) Reliability of partial ambiguity fixing with multiple GNSS constellations. J Geod 87(1):1–14. doi:10.1007/s00190-012-0573-4
Wang L, Feng Y (2013b). Fixed failure rate ambiguity validation methods for GPS and COMPASS. In: Proceedings of the China satellite navigation conference (CSNC), vol 102(B3), pp 396–415
Wübbena G, Schmitz M, Bagge A (2005) PPP-RTK: precise point positioning using state-space representation in RTK networks. In: Proceedings of 18th international technical meeting, pp 13–16
Xu P, Shi C, Fang R, Liu J, Niu X, Zhang Q, Yanagidani T (2013) High-rate precise point positioning (PPP) to measure seismic wave motions: an experimental comparison of GPS PPP with inertial measurement units. J Geod 87(4):361–372. doi:10.1007/s00190-012-0606-z
Yang Y (2010) Prograss, contribution and challenges of compass/Beidou satellite navigation system. Acta Geod Cartogr Sin 39(1)
Yang Y, Li J, Xu J (2011) Contribution of the compass satellite navigation system to global PNT users. Chin Sci Bull 56(26):2813–2819. doi:10.1007/s11434-011-4627-4
Yao Y, Zhang R, Song W, Shi C, Lou Y (2013) An improved approach to model regional ionosphere and accelerate convergence for precise point positioning. Adv Space Res 52(8):1406–1415. doi:10.1016/j.asr.2013.07.020
Zhao Q (2004) Research on precise orbit determination theory and software of both GPS navigation constellation and LEO satellites.PhD dissertation, School of Geodesy and Geomatics, Wuhan University, Wuhan (in Chinese with an abstract in English)
Zhao Q, Guo J, Hu Z, Shi C, Liu J, Cai H, Liu X (2011) GRACE gravity field modeling with an investigation on correlation between nuisance parameters and gravity field coefficients. Adv Space Res 47:1833–1850. doi:10.1016/j.asr.2010.11.041
Zhao Q, Guo J, Li M, Qu L, Hu Z, Shi C, Liu J (2013) Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J Geod 87(5):475–486. doi:10.1007/s00190-013-0622-7
Zhou S, Cao Y, Zhou J, Hu X, Tang C, Liu L, Guo R, He F, Chen J, Wu B (2012) Positioning accuracy assessment for the 4GEO/5IGSO/2MEO constellation of COMPASS. Sci China Phys Mech Astron 55(12):2290–2299. doi:10.1007/s11433-012-4942-z
Zumberge J, Heflin M, Jefferson D, Watkins M, Webb F (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017
Acknowledgments
The study is partially sponsored by National Natural Science Foundation of China (41374034, 41231174, 41104024, 41204009), and partially sponsored by Natural Science Foundation of China (2014AA123101), and partially sponsored by the Fundamental Research Funds for the Central Universities (2042014kf0081). The authors thank the three anonymous reviewers for their valuable comments. Thanks also go to IGS for data provision.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Gu, S., Lou, Y., Shi, C. et al. BeiDou phase bias estimation and its application in precise point positioning with triple-frequency observable. J Geod 89, 979–992 (2015). https://doi.org/10.1007/s00190-015-0827-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-015-0827-z