
Abstract
Design for assembly (DFA) is a common engineering technique aiming to reduce assembly costs, increase productivity, and reduce parts cost and material flow. Traditional DFA methods are based on CAD modelling and analysis using specific algorithms comprising the DFA rules. However, such traditional approaches lack of practicality and capability to consider the assembly know-how of designers and manufacturers. In order to overcome some of the limitations of current DFA methods, in this paper a new DFA system based on a haptic-enabled virtual reality approach is proposed. The proposed system, named haptic-enabled VR design for assembly (HVR-DFA), is able not only to simulate the product assembly and collisions among parts, but also to evaluate the product design and assemblability, and to automatically generate assembly planning data from the virtual assembly task execution. Consequently, the user can interactively assess DFA rules and part interferences during the virtual assembly execution. To evaluate the feasibility of the system, a case study corresponding to the assembly of a mechanical component is presented and analysed. The results have demonstrated that the proposed system is an effective DFA tool and more practical than the traditional methods. Moreover, it benefits from the know-how of the assembly experts.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Assembly planning and evaluation are important components of the product design process. A well-designed assembly process should take into account various factors such as optimum assembly time and sequence, tooling and fixture requirements, ergonomics, operator safety, and accessibility, among others [1]. Design for Assembly (DFA) is an engineering technique used to reduce assembly costs and parts costs by simplifying the product design in order to be easily assembled. Such design simplifications are accomplished by reducing the number of parts or operations required to assemble the product, improving the handling of each component, or modifying the required operations. DFA not only simplifies the product to reduce the assembly cost but also to reduce the overall manufacturing costs [2]. Moreover, the benefits of DFA comprise improved quality and reliability of the product, and reduction of production equipment and part inventory. However, traditionally, the design and the manufacturing departments do not interact properly in an industry. Common expressions such as, We design it, you build it or over the wall, mean the designers do not care about manufacturing; they think that their responsibility is to design the components, and after that throw all the drawings aside for manufacturing engineers and so on [3].
There are three principal methods to carry out an assembly process, Fig. 1 [4]: (1) manual assembly, in which operations are performed manually with the aid of simple tools, and the assembly cost per unit is constant; (2) automatic assembly, in which synchronous indexing machines and part feeders are used, and the assembly cost per unit decreases when the production volume increases; and (3) robotic assembly, which is the most flexible and can achieve production volumes close to the automatic assembly methods. However, the DFA should always be applied despite the method used to carry out the assembly process, or even when the assembly costs are relatively small [5]. The stimulus to consider a DFA analysis is to improve productivity and reduce costs by improving the design of parts and components.

Different methods of assembly processes in the industry
The introduction of Industry 4.0, collaborative robotics, and concurrent engineering, has led to the need to adapt the existing design for manufacturing and assembly (DFMA) methods [6]. Virtual reality (VR) represents a technological tool to address the challenges of modern industries; in particular, to adequate the DFMA techniques in order to satisfy the new industrial needs. VR technology combines multiple human–computer interfaces and has the potential to enhance 3D visualisation, carry out dynamic simulations in virtual environments, and simulate collisions to provide the user with a sense of presence in the virtual world. The ultimate goal of VR is to provide an “invisible interface” that allows the user to interact with the virtual environment as they would with the real world. This makes VR an ideal tool for simulating tasks that require frequent and intuitive manual interaction such as assembly methods [1]. Some of the leading U.S. manufacturing industries such as Ford, General Electric (GE), and Lockheed Martin aerospace and defence companies, have successfully incorporated VR and/or augmented reality (AR) technologies in workforce training and production [7]. In response, they found tremendous productivity improvement. For example, Lockheed Martin developed a virtual environment to train the workforce to build the F-35 fighter plane. They reported that the employee who received the VR training worked faster with 96% accuracy during real-world fabrication. These findings suggest that VR could be an extremely valuable tool in the education and training of the next-generation manufacturing workforce [7]. Furthermore, virtual reality–aided DFA (VR-DFA) can soften or eliminate concurrent engineering problems along the entire product lifecycle because engineers can analyse from product design to manufacture in order to take feedback, improve components and simulate manufacture using virtual machines [8], as shown in Fig. 2. VR-DFA allows the integration of design, manufacturing, and assembly experts; speed up the productivity cycle; reduce the costs; and improve the product quality and reliability [9].

Virtual reality and DFA integration
Even though it has long been known that product considerations and constraints must be included from the early stages of the product development process, existing DFA methods have several limitations and their implementation is still incomplete [10]. On one hand, traditional DFA methods are based on CAD modelling and DFA guidelines to simplify, standardised, automate, and quality [11]. However, such traditional approaches lack practicality because the DFA guidelines are no more than general hints for the designer to take into account during the product design process, CAD models do not have physical behaviour to assess geometric tolerances and manufacturing assemblability, the interaction with the product is not intuitive, and the integration and interaction between design and manufacturing experts are difficult. On the other hand, although modern VR-DFA approaches have solved several drawbacks of traditional DFA methods, they still have some technical limitations, such as the inability to objectively evaluate the assemblability and to generate valuable assembly data to support the decision-making process along the product development cycle, and the inability to provide the user with tactile and force feedback during the virtual interaction, as in real life.
In order to address this research gap, in this paper, a new design for assembly system based on virtual reality and haptic technologies is proposed. The proposed system, named haptic-enabled VR design for assembly (HVR-DFA), allows the user to interactively realise assemblies in a virtual environment by means of a haptic device, in order to identify assembly issues and to objectively evaluate different design and assembly variants. Moreover, the system is able not only to simulate the product assembly and collisions among parts, but also to provide the user with tactile and force feedback during the virtual interaction, evaluate the product design and assemblability, and automatically generate assembly planning data from the virtual assembly task execution.
The rest of the paper is organised as follows. Section 2 provides an overview of the relevant literature of DFA methods, highlighting their limitations and current research gaps. In Section 3, the proposed HVR-DFA system is introduced, describing its architecture and DFA methodology. In Section 4, a case study corresponding to an air motor is presented and analysed to validate the feasibility of the proposed system. The results of the implementation and evaluation of the proposed system, based on the case study, are analysed and discussed in Section 5. Finally, Section 6 presents the conclusions of this research work, emphasising the novel characteristics of the proposed system.
2 Related works
Design for assembly (DFA) methods originated in the 1960s with basic guidelines to improve a product during the design process [12]. These guidelines were integrated into systematic qualitative and quantitative DFA analysis tools that would help the designer improve the products’ assembly time. The main objective of the DFA was to reduce the number of parts to minimise the assembly time, fasteners, parts inventory, and overall cost of the products. Later on, researchers began to realise the advantages of implementing DFA through computer software to improve the analysis. The development of automatic DFA methods focuses on implementing methods through software that gathers required inputs from an external source, typically two-dimensional or three-dimensional modelling software. In the 1980s, Boothroyd and Dewhurst [13] proposed the DFA with the development of a design for automatic and manual assembly software. Later, the concept was further extended to manufacturing features and named design for manufacturing (DFM). Today, the “design for excellence” (DFX) concept is widely used for different design topics such as [11, 14,15,16,17] design for functionality (DFF), design for usability (DFU), design for service (DFS), design for recycling/disposal (DFR), and design for safety. The emerging manufacturing trends have extended the concept to include new technologies such as the design for additive manufacturing (DFAM) [18]. The DFX concept is defined as the application of rules, guidelines, and methodologies during product development with the purpose of impacting its value while meeting the production design requirements [19].
Several DFA methods to evaluate the efficiency of a product design from a product assembly perspective have been proposed in the literature; the most prominent methods are the [9, 20,21,22,23,24,25,26,27] method–time measurement, manufacturing producibility handbook, Boothroyd and Dewhurst method, assembly evaluation methods, Lucas method, large-size methods, assembly-oriented product design, and DFA sandpit. The aim of these methods is to encompass a diversity of products, processes, and materials. The core of any DFA method is a group of design principles or guidelines to help designers reduce the cost and complexity of assembling a product. Table 1 presents the main DFA guidelines and their benefits [28].
At present, the analysis of DFA can be conducted in a VR environment able to visualise, simulate, and analyse assembly/manufacturing processes. VR is considered one of the mandatory technologies in the era of Industry 4.0 because it plays a vital role in simulating 3D human–computer interactions. VR can provide users with different kinds of sensations (visual, auditory, and haptic), creating an increased sense of presence in a computer-generated scene. Haptic technologies enable the user to feel the force feedback from the virtual environment, leading to a more intuitive and natural way to simulate the assembly process during the design phase of new components, even before any prototype [7, 29, 30]. In the last years, virtual assembly (VA) has become a popular assembly tool and is defined as utilising VR technology, computer graphics, artificial intelligence, and assembly theory and methods to construct the virtual model of a product and the virtual environment of the assembly layout and to interactively simulate and analyse the product design and assembly process [31]. Virtual assembly simulations allow designers to perform assembly/disassembly evaluations at early design stages. By the use of virtual models, design changes can be incorporated easily at the conceptual design stage, thus optimising the design process towards Design for Assembly [1].
A fully functional virtual manufacturing assembly simulation system that solves the issues related to VR environments was introduced in [32]. The proposed system used a virtual environment to create an interactive workbench that can be used for evaluating assembly decisions and training assembly operations. It was concluded that the system worked successfully even with large components. On the other hand, a new assembly validation system independent of CAD programs and implemented using low-cost hardware and software tools was presented in [33]. The system featured intuitive bare-hand manipulation of part models through a virtual hand model that tracks the hands. Moreover, an assembly feature extraction algorithm was implemented to analyse the planar face features of the parts to detect possible mating assembly features between parts. It was concluded that the collision detection and physics modelling allowed for hand–part and part–part interactions to be natural, validating the assembly interactions. On the other hand, an investigation to assess the effectiveness of VR-based assembly training was presented in [34]. A series of user-based evaluation studies were conducted to ensure that the virtual manufacturing assembly simulation provided an effective and efficient means for evaluating assembly operations and training assembly personnel. Different feedback cues of VR were implemented to evaluate the system. The results revealed that participants trained by VR made fewer errors and took less time in the real-world product assembly than participants of the traditional training group.
Recently, several authors have developed VA systems using different methodologies and features. In [35], a method to analyse and enhance industrial workplaces using immersive virtual reality was proposed. The system allowed the tracking of multiple users virtually performing assembly tasks, and the visualisation of key performance indicators (e.g., completion time, travelled distance, ergonomics) for supporting decision-making by production engineers. To demonstrate the proposed approach a case study was analysed. The results showed that the proposed method is able to eliminate the need for time-consuming simulations to create a resource-efficient layout and allow the real-time validation of layouts in a cost-effective way. More recently, a methodological framework for assembly system 4.0 workplace design using the motion capture (mocap) system and VR, was presented in [36]. A case study was also used to validate the framework, which included productivity and Occupational Safety and Health (OSH) considerations and the ageing workforce’s main characteristics. The results showed that the proposed methodological framework allowed both the productivity and operators’ well-being to be maximised considering a holistic approach. In addition, the task assembly times were reduced by around 15%, and the ergonomic risks were also reduced from high to medium. However, it was also concluded that in order to further prove the validity of the framework, it needs to be applied in other case studies where real industrial applications, bigger sample sizes, and repetitiveness of the data are considered. Similarly, an integrated VR-based method for the ergonomic optimization of manual operations was proposed in [37]. The proposed method integrated multiple VR hardware devices, motion capture data, and the evaluation method in the DELMIA™ environment. In addition, the working posture could be evaluated and analysed based on real human data according to actual needs. To demonstrate the effectiveness of the method, a practical case study was presented. It was concluded that the proposed method enabled designers to conduct immersive industrial maintenance and assembly to improve design cognition, and comprehensively analyse and evaluate the ergonomic design.
The literature review reveals that DFA techniques have evolved considerably from their beginning. Figure 3 summarises the DFA evolution in the last decades, where it can be observed that traditional DFA methods are based on CAD software and DFA rules and guidelines. These rules and guidelines are general hints that must be considered during the product development process. However, such traditional approaches are impractical because geometric tolerances and assemblability cannot be assessed intuitively since CAD models do not have physical behaviour. Moreover, the integration and interaction between design and manufacturing experts is difficult. Modern DFA techniques have considered the integration of VR technologies to realistically simulate assembly processes and interactively assess the DFA rules and guidelines. However, although several VA platforms have been proposed in the literature [1, 29, 38,39,40], most of them have mainly focused on evaluating their functionality as a simulation tool rather than as an engineering design tool to generate valuable assembly data to support the decision-making process along the product development cycle. Moreover, few VA systems are able to carry out DFA analyses and assessments, and very few works have integrated haptics in virtual assembly systems to simulate assembly operations. Thus, modern VR-DFA techniques still have several technical limitations, such as the incapability to objectively evaluate the product’s assemblability, to generate assembly data to support the decision-making process along the product development cycle and to provide the user with tactile and force feedback during the virtual interaction, as in real life. These limitations of the existing VR-DFA techniques represent a current research gap.

DFA timeline
In order to fill out the current research gap of VR-DFA techniques, and to integrate DFA knowledge and practical know-how of the user, in this paper, a new design for assembly system based on virtual reality and haptic technologies, is proposed and evaluated. In the proposed system, named haptic-enabled VR design for assembly (HVR-DFA), the user is able to interactively execute assembly tasks by means of a haptic device in order to identify assembly issues and to objectively evaluate different product designs and assembly strategies. Furthermore, the system is able not only to simulate the product assembly and collisions among parts, but also to provide the user with tactile and force feedback during the virtual interaction, and automatically generate assembly planning data from the virtual assembly task execution.
3 Haptic-enabled virtual reality design for assembly
The proposed Haptic-enabled VR Design for Assembly (HVR-DFA) system, incorporates the physical-based behaviour and collision detection in the virtual environment, to simulate assembly operations as in the real world. Moreover, human expertise and knowledge are integrated into the virtual assembly process. In this way, the computational cost and time are reduced, and the DFA analysis becomes more efficient and practical than when using traditional methods. The architecture of the proposed HVR-DFA system is shown in Fig. 4, and comprises the following four main modules:
-
1.
Input module: enables the importing and uploading of virtual models into the system (*.stl, *.obj, *.vtk), and the definition of the model properties.
-
2.
Graphics module: responsible for the graphics rendering, which includes the creation and representation of the virtual scene and 3D models; the visualisation of assembly paths, messages, and assembly information; and the creation of buttons and widgets to configure the simulation parameters. In this module, the Visualization Tool Kit libraries (VTK 5.10) for the graphic rendering of the virtual environment and objects is used.
-
3.
Physics module: enables the physical-based behaviour of virtual objects in order to have realistic dynamic and collision responses. By means of the physics module, virtual objects are dynamic and interact with each other by means of collision response, resulting in a physics behaviour similar to real-world behaviour. The collision response between objects prevents the overlapping of virtual objects, enabling the assembly of components. Three different physics simulation engines are used: Bullet, PhysX v2.8, and PhysX v3.1. The user is able to select any of them during the system operation.
-
4.
Haptic module: provides virtual force feedback to the user to enable the sense of touch and kinesthesia. The Open Haptics toolkit v3.0 is used to integrate haptics into the HVR-DFA system. The virtual model is moved directly by the position and orientation of the haptic device. If the virtual model is moved, a force is computed by the physics module, and rendered to the user by means of a haptic device.

HVR-DFA system architecture
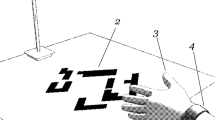
The graphic user interface (GUI) of the system is shown in Fig. 5 and includes a 42″ monitor with 3D full-HD capabilities. The HVR-DFA system has been developed and integrated in Visual Studio C + + using the Microsoft Foundation Class (MFC). The implementation was made on a DELL precision T5610 workstation, with a Xeon processor of 2 GHz, and 8GB RAM. Haptic feedback is provided by means of a Phantom Omni device from Sensable®. The algorithm for the manipulation of virtual objects in the HVR-DFA system is illustrated in Fig. 6.

GUI of the HVR-DFA system

Manipulation of virtual objects
The main outstanding functionalities of the HVR-DFA system are: haptic-enabled free manipulation of virtual objects, dynamic behaviour and collision detection of virtual objects, automatic assembly data logging (position, movements, time, etc.), automatic generation of assembly plans from virtual assembly executions, automatic computation of assembly metrics, and objective assessment of assembly plans. During the simulation or execution of the assembly process, the user’s motions are logged and categorised into three different groups: (1) wandering, which refers to the user’s motions around the virtual environment but without manipulating any object; (2) touching, which refers to the motions when the user touches an object, and (3) controlling, which refers to the motions when the user manipulates the virtual object. All these motions and times are automatically logged by the system for further processing.
To validate the proposed system in terms of the virtual assembly simulation, four components were selected as shown in Table 2. These assembly tasks were executed in the HVR-DFA system at least five times by one specialist using the haptic device. The task completion time (TCT) and the mean haptic force rendered to the user, were measured for each component. The results are shown in Table 1, where it is observed that all the components could be assembled in the HVR-DFA system having force feedback rendered to the user. From these results, it can be said that the HVR-DFA system is valid and able to simulate virtual assembly operations in a more intuitive and practical way, since the user has only to perform the virtual assembly process, and the system will automatically log and calculate the assembly metrics.
3.1 Design for assembly methodology
The overall procedure to carry out a design for assembly analysis in the proposed HVR-DFA system is shown in Fig. 7. Once the design of a component comprising several parts has been completed, all parts must be uploaded into the HVR-DFA system, where the analyst can freely touch, explore, interact and manipulate them by means of the haptic device to perform the product assembly. The analyst can also feel dynamic forces such as weight, inertia, and collisions among the virtual parts. The system tracks and logs all the information regarding the assembly operation, such as sequences, trajectories, and movements (positions, timestamps, speeds, etc.) made by the user during the virtual assembly execution [30]. While the virtual assembly is carried out, the analyst can iteratively evaluate the product assembly feasibility and suggest simplifications based on his/her experience and on the DFA guidelines. After some virtual assembly iterations, the analyst can get a better product design. Wright’s law and the discovery of the learning curve effect show that “the more times a task has been performed, the less time is required on each subsequent iteration” [41]. The learning curve effect is also manifested in the virtual world [42]. The virtual assembly operation allows the expert to experience the DFA guidelines and to generate the knowledge to improve the real assembly product; i.e. generate the know-how in the virtual world to apply it in the real world.

Virtual DFA procedure
The criteria used to qualitatively evaluate and compare different design alternatives from an assembly point of view comprised the following assembly metrics proposed in [30]: Task completion time (TCT), effective task completion time (ETCT), non-productive task completion time (NPTCT), effective handling distance (EHD), total assembly distance (TAD), effective assembly distance (EAD), non-productive assembly distance (NPAD), workspace (WS), potential energy (PE), total energy (TE), effective potential energy (EPE), total energy efficiency (TEE), potential energy efficiency (PEE), assembly potential energy efficiency (APEE), total assembly energy efficiency (TAEE), total assembly energy (TAE), handling efficiency (HE), assembly manipulability (AM), total assembly handling (TAH), and degrees of freedom (DOF). These metrics contain single-part metrics and product assembly metrics, which are described in detail in [30]. The selected assembly metrics were implemented in the HVR-DFA system and are automatically computed from the assembly process execution by the user.
In the case of assembly sequences, genetic algorithms are able to search for feasible assembly sequences; however, they are abstract, exhaustive, and costly in terms of computational time because the assembly sequences must be analysed one by one. If a traditional method, such as the liaison diagram, had to be used to analyse the feasible assembly sequences, it would be chaotic to detect them due to the large number of lines that cross. In general, traditional methods are clear and effective for assemblies with a small number of parts; however, they become more complicated as the number of parts increases, becoming impractical and inefficient. A feasible assembly sequence is a sequence that can be carried out with the real components. On the other hand, a non-feasible sequence is illogical, inconsistent, or physically impossible to carry out. Some non-feasible assembly sequences are obvious and easy to detect, while other non-feasible assembly sequences can only be detected when the assembly is carried out physically. By means of the HVR-DFA system, non-feasible assembly sequences can be identified virtually, avoiding the analysis of assembly sequences that are impossible to perform in the real world.
4 Case study
In order to illustrate and evaluate the proposed haptic-enabled virtual reality DFA approach, a case study corresponding to an air motor comprising 19 parts, as shown in Fig. 8, was selected. To reduce the computational cost and improve the performance of the air motor virtual assembly, some parts such as screws, cylinder pivot, crankshaft, and connecting rod were simplified by omitting their threading, and in the case of the spring, the pitch was increased. These simplifications do not affect the essence and assembly characteristics of the virtual parts. The 19 parts are imported into the HVR-DFA system, as shown in Fig. 9a. The position and orientation of each part in the virtual environment must be defined properly since the effect of gravity may cause the parts to be unstable and collapse. After several stability trials in the HVR-DFA system based on the analyst’s knowledge and experience, the initial assembly configuration of the parts was defined as shown in Fig. 9b.

Air engine

Virtual assembly task a imported parts and b proposed initial configuration
4.1 Preliminary virtual assembly tests
The first assembly tests were conducted in order to detect redundant or unnecessary movements and to identify the best initial locations and orientations of the parts to ensure a good assembly performance. From the initial configuration, it was observed that part 3 interrupts the visibility during the assembly of part 11 into part 2, as shown in Fig. 10a. Thus, a new initial location of part 3 is proposed as shown in Fig. 10b. On the other hand, to reduce the manipulability of the parts and the assembly time, parts 2, 3, 11 and 12 are reoriented 90° to match with the orientation at their final locations, as shown in Fig. 10c. When assembling part 3 into part 4, it is observed that part 3 has a hole where part 17 must be inserted to secure part 3 on part 4. Therefore, part 3 must be rotated 180° so that the orientation of the hole is correct to assemble part 17, as shown in Fig. 10d. Similarly, when part 6 is assembled on part 5, it is observed that the hole at the top of part 6 is not aligned with the hole at the top of part 5 to allow the air intake and exhaust, as shown in Fig. 10e. Therefore, part 6 must be rotated 180° to correct this misalignment. In addition, parts 9, 10, and 15 must be rotated 90°, while parts 7 and 8 must be rotated 180° to be assembled in their final position.

Results of the preliminary virtual assembly tests: a part 3 obstruction; b modified location of part 3; c rotation of parts 2, 3, 11, and 12; d reorientation of part 3; and e incorrect orientation of part 6
If all these details related to the initial configuration and orientation of the parts are not corrected in the real assembly process, they will have a negative effect on the assembly time and cost. When the assembly is performed a thousand times, thousands of unnecessary motions would be made. These details in the initial assembly setup, which resulted from analysing the assembly task for the first time in the virtual environment, are very difficult to detect using the traditional assembly analysis methods. The interaction of the expert with the virtual assembly operation allowed the detection of these problems at an early stage of the assembly planning.
4.2 Stability analysis
From the preliminary virtual assembly tests, it was observed that parts 2, 3, 6, 7, 8, 9, 10, 11, 12, and 15, needed to be rotated in order to be assembled into their final position. However, it is necessary to analyse the stability of these parts in their proposed initial orientations. Virtual stability is defined as the unalterable balance that the part has over time; that is, the part remains immobile under the effect of virtual gravity. Figure 11 shows the stability analysis of part 2 in the HVR-DFA system. Figure 11a shows two different initial orientations of the same part, 2 and 2′. However, in Fig. 11b and c, it is observed that the initial configuration 2′ is highly unstable because of the virtual gravity, and therefore the proposed orientation is discarded and the orientation 2 is maintained. Figure 11d shows the new configuration of all parts after the stability analysis.

Stability analysis: a part 2 located in its initial position, b part 2′ unstable, c collapse of part 2′, and d new initial assembly configuration
4.3 Subassembly analysis
From the virtual assembly execution, it was identified the need to create three subassemblies in order to make the real assembly operation easier and more efficient. The subassemblies one and two consist of joining parts 1 and 2, and parts 5 and 6, respectively, by means of a welding process; and the subassembly three consists of joining parts 8 and 9 by means of screws. These three subassemblies are shown in Fig. 12a. Thus, the number of parts involved in the virtual assembly decreases from 19 to 16, as shown in Fig. 12b.

Subassembly analysis: a proposed sub-assemblies and b new set of parts
4.4 Interference analysis
An interference analysis was also conducted to identify interference problems. Figure 13 shows an interference problem between part 4 and subassembly S3; if part 4 is assembled with a slight inaccuracy, as shown in Fig. 13a, it may result in not being able to correctly assemble part 2. Figure 13b shows that the assembly path of part S3 is hindered by part 4, which is slightly out of its correct position. To correct this error, and ensure that part 4 is properly assembled, a notch is added to part 4, as shown in Fig. 13c. This notch should coincide with the hole in part 3, allowing part 17 to be inserted correctly.

Interference analysis: a incorrect assembly of part 4, b interference of part S3 with part 4, and c notch to ensure proper assembly
4.5 Assembly trajectory analysis
The analysis of the assembly trajectories showed that the subassembly S3 could be assembled through two different paths: the first assembly path consists of introducing part S3 through the bottom of part S2 (Fig. 14a), and the second path considers inserting S3 through the top of part S2 (Fig. 14b). Since both paths are feasible, it is necessary to select the best based on a criterion, such as energy cost.

Energy analysis: a assembly trajectory 1 and b assembly trajectory 2
The results of the evaluation are shown in Table 3. The most important difference between the two paths is the potential energy (PE) or work necessary to assemble the part in its final position; path 2 requires 1.57 J while path 1 requires only 0.29 J (80% less energy). Consequently, path 1 is more efficient (93.1%) than path 2 (58.6%). Regarding the task to complete the task (TCT), path 2 requires 3 s more than path 1. The assembly distance (EHD) that path 2 requires is greater (806 mm) than path 1 (550 mm). On the other hand, it is observed that the total energy efficiency (TEE) of path 2 (52.8%) is greater than path 1 (33.0%); however, it can be seen that path 1 has a winding path caused by the designer when moving the part, decreasing the total efficiency. The workspace (WS) required for both paths is very similar, 7.06 cm3 and 8.82 cm3 for paths 1 and 2, respectively. However, although they are very similar in volume, their shape is different, as shown in Fig. 15. From the analysis of these results, it is decided that part S3 must be made using path 1, which was the one with the best results in most of the assembly metrics. This decision also considered that the assembly of part S3 into part S2 corresponds to the last assembly operations to complete the task, so the workspace is already cleared to follow path 1.

Workspace of both assembly paths
4.6 Assembly sequences
The total number of assembly sequences for the air motor can be calculated by permutations without repetition. Thus, the possibilities of assembling the air motor turn out to be 20 factorial (more than 2.4 × 1018) and comprise feasible and non-feasible sequences. From the liaison diagram, Fig. 16, a matrix is created with the number of links, which for the air motor is 28. Figure 17 shows the analysis of the feasible assembly sequences for the air motor. This analysis begins with an empty matrix containing 28 relationships among the parts. Subsequently, the matrix is filled from these relationships. It is observed that the diagram becomes more complicated as the assembly is generated.

Liaison diagram of the air motor assembly

Graphical representation of all valid assembly sequences
In the case of the proposed HVR-DFA system, below is a series of conditions that must be met in order to have feasible assembly sequences of the air motor, which were identified after conducting the virtual assembly pilot tests:
-
Part S1 must always go first, for example {S1–…}; otherwise, it will lead to non-feasible assembly sequences.
-
Part 11 must be assembled before part 18; otherwise, it will lead to a non-feasible sequence.
-
Part 11 must always precede part 12, part 12 must precede part 4, part 4 must precede part 3, and part 3 must precede part 17; for example {S1–…–11–…–12–…–4–…–3–…–17–…}; otherwise, it will lead to a non-feasible sequence.
-
Parts S2 and 16 must be assembled consecutively; for example {S1–…–S2–16–…}; otherwise, it will lead to a non-feasible sequence.
-
Part 16 must precede part 14 and part 4 must precede part 15; for example {S1–…–16–…–14–…–15–…}; otherwise, it will lead to a non-feasible sequence.
-
Part 4 must precede part 10, part S2 must precede part S3 and part 7; for example {S1–…–4–…–10–…–S2–…–S3–…–7–…}; otherwise, it will lead to a non-feasible sequence.
-
Part 10 must precede part S3, part S3 must precede part 19; for example {S1–…–10–…–S3–…–19–…}; otherwise, it will lead to a non-feasible sequence.
One of the great advantages of the HVR-DFA system is that it simulates the physical behaviour of virtual objects, so the objects behave as if they were real and any non-feasible assembly sequence cannot be performed. After the analysis of the feasible and non-feasible assembly sequences of the air motor in the HVR-DFA system, the following four feasible assembly sequences were obtained:
-
1.
{S1–S2–16–14–15–13–13–11–18–18–18–18–12–4–3–17–10–S3–19–7}.
-
2.
{S1–11–18–18–18–18–12–4–3–17–S2–16–14–15–13–13–10–S3–19–7}.
-
3.
{S1–13–13–S2–16–14–15–11–18–18–18–18–12–4–3–17–10–S3–19–7}.
-
4.
{S1–11–18–18–18–18–S2–16–12–S3–13–14–4–10–15–19–3–17–7–13}.
5 Analysis and discussion
The virtual assembly tests of the air motor in the HVR-DFA system allowed the reduction of unnecessary assembly motions, detection of ergonomic positions, realization of stability, energy and interference analyses, definition of sub-assemblies, acquisition of experience and knowledge when executing the virtual assembly, and identification of feasible and relevant assembly sequences. Regarding the last, only four assembly sequences were identified and analysed in the HVR-DFA system to select the best assembly sequence. Table 4 shows the results of this analysis based on the assembly metrics.
5.1 Time
Table 4 shows that assembly sequence 2 requires the minimum time to complete the assembly of the air motor (TCT = 488 s), which may be due to the fact that this sequence has the minimum non-productive time (NPTCT = 275 s). Assembly sequence 4, despite having the minimum effective time (ETCT = 204 s), requires the maximum TCT (575 s) and NPTCT (371 s). On the other hand, sequence 1 has the maximum ETCT (231 s). Thus, it can be concluded that in terms of time, assembly sequence 2 is the best. It is important to mention that since in the four assembly sequences the non-productive times (NPTCT) are greater than the productive times (ETCT), the time to assemble the motor could be reduced by decreasing the non-productive time associated with unnecessary trajectories or movements.
5.2 Distance
Regarding the travelled distance to complete the assembly, Table 4 shows that sequence 2 requires the minimum effective distance (EAD = 10.10 m) and the minimum non-productive distance (NPAD = 43.98 m). On the other hand, sequence 1 has the maximum EAD and NPAD values, 11.9 m and 45.19 m, respectively. Therefore, assembly sequence 2 is the best sequence in terms of the travelled distance.
5.3 Energy
The results in Table 4 show that assembly sequence 3 requires the minimum energy to complete the assembly of the air motor (TAE = 10.51 J). The energy metric also represents the user’s confidence to make the assembly; if the user is unconfident, sinusoidal, winding, or zigzagging assembly trajectories may be obtained. In addition, a prolonged virtual assembly session will cause human fatigue in hands, wrists, head, and eyes, leading to assembly paths that are not efficient (sinusoidal, winding, zigzagging, etc.).
5.4 Efficiency
Regarding the efficiency metrics, the assembly sequence 3 has the maximum total energy efficiency (TAEE = 59%), and the assembly sequence 4 has the maximum potential energy efficiency (APEE = 68%). On the other hand, assembly sequence 2 is the least efficient since it has the minimum values of TAEE and APE, 49% and 62%, respectively. It is important to mention that in the case of small and light assemblies such as the air motor, the energy criteria may not have a great impact on the evaluation, especially if the assembly is conducted manually. The differences observed among the TAEE and APE values of the four assembly sequences are due to the assembly path stability (smoothness) when placing each part into its final position. On the other hand, Table 4 also shows that sequence 2 has the greatest handling efficiency (HE = 87%), which means that assembly sequence 2 requires the minimum number of part movements to carry out the air motor assembly.
5.5 Workspace
Table 4 reveals that assembly sequence 2 requires the smallest workspace (WS = 98,788 cm3), while the largest workspace corresponds to assembly sequence 1 (WS = 142,153 cm3). Therefore, sequence 2 is best in terms of the workspace criteria.
5.6 Angular manipulability
According to Table 4, all the assembly sequences require the same angular manipulability (AM) of 180° with respect to the z-axis. In other words, the hand dexterity needed to perform the assembly is a rotation of 180° around the z-axis. These results are because, in the initial configuration, all parts were correctly oriented, except the piston.
5.7 Total assembly handling
The air motor assembly comprises 16 parts, so 16 should be the total number of times that all parts are manipulated (grasped) during the product assembly. From Table 4, it is observed that assembly sequence 2 requires the minimum number of assembly movements (TAH = 23), while assembly sequence 3 requires the maximum number of assembly movements (32). In general, each part was placed at its final position in its first manipulation, with the exception of the bearing housing, the crankshaft, and the connecting rod, which had to be manipulated more than once due to their complexity to be assembled. These additional manipulations within the actual assembly process reveal the assembly complexity of some parts and the need to be manipulated more than once.
5.8 Degree of freedom
Table 4 also shows the number of DOF involved in the air motor assembly. It is observed that the four assembly sequences require at least 4 DOF. Three DOF correspond to the three translations along the x, y, and z axes, and one DOF corresponds to the rotation of the connecting rod. In manual assemblies, the DOF indicates the manual skill level required by the assembly operators.
Finally, it can be said that the proposed HVR-DFA system takes advantage of the analyst’s experience and intuition to evaluate and improve the design and assembly of components. The system provides a virtual environment where the analyst can execute assembly tasks as in the real world in order to identify problems, provide solutions, and evaluate different assembly strategies. The proposed system is practical because the analysts must carry out the assembly task in the virtual environment to obtain results according to their experience. The assemblability of a product is implicitly assessed when carrying out the product assembly in the virtual environment; if the product can be assembled virtually, then it is manufacturable. In addition, assembly metrics can objectively assist the decision-making process when having different design or assembly strategies. These assembly metrics are automatically calculated from the virtual assembly execution in the HVR-DFA system. If the assembly metrics were to be evaluated in real life or using the traditional approaches, the required cost, time, and equipment needs would be very high. In this way, the proposed HVR-DFA system represents an economical, practical, and efficient approach to conducting DFA studies.
On the other hand, the HVR-DFA system is still limited to semi-complex assemblies because of the high computational cost that large and complex assemblies will demand during the assembly simulation. In addition, complex parts such as bolts must be simplified as single pins in order to ease the simulation and reduce the computational cost. Furthermore, each analyst may obtain different results according to their knowledge, abilities, and experience; therefore, novice analysts may require more time to carry out DFA analyses.
6 Conclusions
A new method for DFA has been introduced. The proposed method is based on VR and haptic techniques to provide an interactive and intuitive DFA approach. The results have demonstrated that the proposed HVR-DFA system is an effective tool for DFA, since it integrates experience, intuition, and human skill, which are not considered by traditional DFA methods. One outstanding advantage of the new proposed DFA approach is its capability to automatically evaluate different assembly strategies or plans from the execution of the virtual assembly. This evaluation is based on several assembly metrics that can be used to select the best design and assembly plan according to the particular needs of the expert. The proposed HVR-DFA system emerged as a computational tool to improve DFA, assembly training, and assembly planning techniques, in order to ease and speed up the product development process in industry. Future work comprises the optimization of the system’s algorithms in order to reduce the computational cost for large and complex components. A comparative analysis of the proposed approach with other existing methods is also part of the future work.
References
Seth A, Vance JM, Oliver JH (2011) Virtual reality for assembly methods prototyping: a review. Virtual Reality 15(1):1–38. https://doi.org/10.1007/s10055-009-0153-y
Boothroyd G, Dewhurst P, Knight WA (2010) Product design for manufacturing and assembly, 3rd edn. CRC Press, Taylor and Francis Group, Florida
Boothroyd G, Alting L (1992) Design for assembly and disassembly. CIRP Ann 41(2):625–636. https://doi.org/10.1016/S0007-8506(07)63249-1
Mital A, Desai A, Subramanian A, and Mital A (2014) 7 - Designing for assembly and disassembly. In: Mital A, et al. (ed) Product development, 2nd edn. Elsevier, pp. 159–202. https://doi.org/10.1016/B978-0-12-799945-6.00007-7.
Boothroyd G (1987) Design for assembly – the key to design for manufacture. Int J Adv Manuf Technol 3(3):3–11. https://doi.org/10.1007/BF02601481
Gualtieri L, Monizza GP, Rauch E et al (2020) From design for assembly to design for collaborative assembly – product design principles for enhancing safety, ergonomics and efficiency in human-robot collaboration. Procedia CIRP 91:546–552. https://doi.org/10.1016/j.procir.2020.02.212
Yang Y, Deb S, He M, Kobir M (2023) The use of virtual reality in manufacturing education: state-of-the-art and future directions. Manuf Lett 35(Supplement):1214–1221. https://doi.org/10.1016/j.mfglet.2023.07.023
Fletcher C, Ritchie J, Lim T, Sung R (2013) The development of an integrated haptic VR machining environment for the automatic generation of process plans. Comput Ind 64(8):1045–1060. https://doi.org/10.1016/j.compind.2013.07.005
Luo T, Luo W, and Lu Z (2007) DFMA for internet-based collaborative design. IEEE 11th international conference on computer supported cooperative work in design, Melbourne, VIC, Australia, pp. 226–232. https://doi.org/10.1109/CSCWD.2007.4281439.
Thompson MK, Jespersen IKJ, Kjaergaard T (2018) Design for manufacturing and assembly key performance indicators to support high-speed product development. Procedia CIRP 70:114–119. https://doi.org/10.1016/j.procir.2018.02.005
Pahl G, Beitz W, Feldhusen J, et al (2007) Engineering design, a systematic approach. 3rd ed., Springer, London, UK. https://doi.org/10.1007/978-1-84628-319-2.
Boothroyd G (1994) Product design for manufacture and assembly. Comput Aided Des 26(7):505–520. https://doi.org/10.1016/0010-4485(94)90082-5
Boothroyd G, Dewhurst P (1983) Design for assembly: manual assembly. Mach Des 55(25):140–145
Meroni A and Sangiorgi D (2011) Design for services. 1st ed. Routledge, London. https://doi.org/10.4324/9781315576657
Mital A, Desai A, Subramanian A. and Mital A (2014) Designing for usability. In: Mital A, et al. (ed) Product Development, 2nd edn. Elsevier, pp. 335–418. https://doi.org/10.1016/B978-0-12-799945-6.00010-7.
Veelaert L, Du Bois E, Hubo S, Van Kets K, and Ragaert K (2017) Design from recycling. In: Proceedings of the international conference 2017 of the design research society special interest group on experiential knowledge (EKSIG2017). Delft University of Technology, Rotterdam, the Netherlands pp 129–143
Eskilander S (2001) Design for automatic assembly - a method for product design: DFA2. Doctoral Thesis. In: A method for product design: DFA2. Woxéncentrum / Assembly Systems Division, Department of Production Engineering, KTH Royal Institute of Technology, Stockholm, Sweden
Thompson MK, Moroni G, Vaneker T et al (2016) Design for additive manufacturing: trends, opportunities, considerations and constraints. CIRP Ann 65(2):737–760. https://doi.org/10.1016/j.cirp.2016.05.004
Bralla JG (1996) Design for excellence, 1st edn. McGraw-Hill, New York
Laring J, Forsman M, Kadefors R, Ortengren R (2002) MTM-based ergonomic workload analysis. Int J Ind Ergon 30(3):135–148. https://doi.org/10.1016/S0169-8141(02)00091-4
Mathieson JL, Wallace BA, Summers JD (2013) Assembly time modelling through connective complexity metrics. Int J Comput Integr Manuf 26(10):955–967. https://doi.org/10.1080/0951192X.2012.684706
Miller M (2011) Product and process-based assembly time estimation in engineering design. Clemson University, South Carolina, USA, Thesis
Dochibhatla SVS, Bhattachrya M and Morkos B (2017) Evaluating assembly design efficiency: a comparison between Lucas and Boothroyd-Dewhurst methods. Proceedings of the ASME 2017 international design engineering technical conferences and computer and information in engineering conference volume 4: 22nd design for manufacturing and the life cycle conference; 11th international conference on micro- and nanosystems. Cleveland, Ohio, USA. https://doi.org/10.1115/DETC2017-68126.
Vielhaber M, Burr H, Deubel T, Weber C and Haasis S (2004) Assembly-oriented design in automotive engineering. In: DS 32: Proceedings of design 2004, the 8th international design conference, Dubrovnik, pp 539–546
Dalgleish GF, Jared GEM, Swift KG (2000) Design for assembly: influencing the design process. J Eng Des 11(1):17–29. https://doi.org/10.1080/095448200261162
Remirez A, Ramos A, Retolaza I, Cabello M, Campos M, Martinez F (2019) New design for assembly methodology adapted to large size products: application on a solar tracker design. Procedia CIRP 84:468–473. https://doi.org/10.1016/j.procir.2019.05.002
Ezpeleta I, Pujana U, Isasa I, Ayerbe J, Justel D (2021) New design for assembly (DfA) methodology for large and heavy parts assembled on site. Procedia CIRP 100:145–150. https://doi.org/10.1016/j.procir.2021.05.078
Bogue R (2012) Design for manufacture and assembly: background, capabilities and applications. Assem Autom 32(2):112–118. https://doi.org/10.1108/01445151211212262
Gonzalez-Badillo G, Medellin-Castillo HI, Lim T, Ritchie JM, Garbaya S (2014) The development of a physics and constraint based haptic virtual assembly system. Assem Autom 34(1):41–55. https://doi.org/10.1108/AA-03-2013-023
Gallegos-Nieto E, Medellin-Castillo HI, Xiu-Tian Y, Corney J (2020) Haptic-enabled virtual planning and assessment of product assembly. Assem Autom 40(4):641–654. https://doi.org/10.1108/AA-10-2019-0169
Xia P, Lopes AM, Restivo MT (2013) A review of virtual reality and haptics for product assembly (part 1): rigid parts. Assem Autom 33(1):68–77. https://doi.org/10.1108/01445151311294784
Al-Ahmari AM, Abidi MH, Ahmad A, Darmoul S (2016) Development of a virtual manufacturing assembly simulation system. Adv Mech Eng 8(3):1687814016639824. https://doi.org/10.1177/1687814016639824
Jayasekera R, Xu X (2019) Assembly validation in virtual reality – a demonstrative case. Int J Adv Manuf Technol 105:3579–3592. https://doi.org/10.1007/s00170-019-03795-y
Abidi MH, Al-Ahmari A, Ahmad A et al (2019) Assessment of virtual reality-based manufacturing assembling training system. Int J Adv Manuf Technol 105:3743–3759. https://doi.org/10.1007/s00170-019-03801-3
Michalos G, Karvouniari A, Dimitropoulos N, Togias T, Makris S (2018) Workplace analysis and design using virtual reality techniques. CIRP Ann 67(1):141–144. https://doi.org/10.1016/j.cirp.2018.04.120
Simonetto M, Arena S, Peron M (2022) A methodological framework to integrate motion capture system and virtual reality for assembly system 4.0 workplace design. Safety Science 146:105561. https://doi.org/10.1016/j.ssci.2021.105561
Guo Z, Zhou D, Hao A et al (2022) An evaluation method using virtual reality to optimize ergonomic design in manual assembly and maintenance scenarios. Int J Adv Manuf Technol 121:5049–5065. https://doi.org/10.1007/s00170-022-09657-4
Li J, Xu Y, Ni J, Wang Q (2016) Gloves-based virtual hand grasping for virtual mechanical assembly. Assem Autom 36(4):349–361. https://doi.org/10.1108/AA-01-2016-002
Garbaya S, Romano D, Hattar G (2019) Gamification of assembly planning in virtual environment. Assem Autom 39(5):931–943. https://doi.org/10.1108/AA-10-2018-0147
Kovar J, Mouralova K, Ksica F, Kroupa J, Andrs O and Hadas Z (2016) Virtual reality in context of industry 4.0 proposed projects at Brno University of Technology. In: 17th international conference on mechatronics-mechatronika (ME), Prague, Czech Republic pp 1–7
Wright TP (1936) Factors affecting the cost of airplanes. Aeronautical Sci 3:122–128. https://doi.org/10.2514/8.155
Gallegos-Nieto E, Medellin-Castillo HI, González-Badillo G, Lim T, Ritchie J (2017) The analysis and evaluation of the influence of haptic-enable virtual assembly training on real assembly performance. Int J Adv Manuf Technol 89:581–598. https://doi.org/10.1007/s00170-016-9120-4
Funding
The authors would like to thank the financial support from the National Science and Technology Council (CONACYT) of Mexico, grant number CB-2010–01-154430. The first author also acknowledges CONACYT for the scholarship provided for his PhD studies.
Author information
Authors and Affiliations
Contributions
The first two authors contributed to the design, development, and evaluation of the proposed system and the analysis of the results and preparation of the manuscript. The first draft of the manuscript was written by Enrique Gallegos-Nieto, and all authors commented on the previous versions of the manuscript. Hugo Medellin-Castillo led the project and all versions of the manuscript. Steffany Cerda-Avila participated in the evaluation of the proposed system, analysis of the results, and preparation of the revised manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Gallegos-Nieto, E., Medellín-Castillo, H.I. & Cerda-Avila, S.N. Haptic-enabled virtual reality–aided design for assembly. Int J Adv Manuf Technol 134, 2849–2865 (2024). https://doi.org/10.1007/s00170-024-14319-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-024-14319-8