
Abstract
Directly solving time-dependent reliability-based design optimization (TRBDO) with aleatory and epistemic uncertainties is time-demanding, which limits its engineering application. By treating aleatory and epistemic uncertainties with probability and evidence variables respectively, an advanced decoupling method named sequential optimization and unified time-dependent reliability analysis (SOUTRA) is proposed in this work. By the SOUTRA, the original nested optimization process is solved by a sequence of unified time-dependent reliability analysis, updated reliability index target estimation and deterministic optimization. Only few numbers of the unified time-dependent reliability analysis are required to derive the optimum by the SOUTRA; thus, it is highly efficient. Furthermore, in order to construct the deterministic optimization, a new probability transformation method named focal element midpoint (FEM) is established to convert the evidence variable into a random one. FEM can avoid the issues of uniformity approach and equal areas method, and both are used in the existing probability transformation. Several numerical and engineering applications are introduced to illustrate the effectiveness of the proposed SOUTRA.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Uncertainties widely exist in applied loads, environmental conditions, and geometric parameters of the engineering structures. These uncertainties seriously affect the operation and even lead to the failure of the structure. Therefore, it is necessary to consider these uncertainties in measuring the safety of structure. Generally, the uncertainty contains aleatory uncertainty and epistemic uncertainty (Zhang and Huang 2010). Aleatory uncertainty also called objective uncertainty is of intrinsically irreducible stochastic nature, while epistemic uncertainty also called subjective uncertainty is reducible (Oberkampf et al. 2002). Probability theory is an efficient tool for quantifying the aleatory uncertainty when sufficient data are available (Zhang and Han 2020). But for the epistemic uncertainty, it is inappropriate to measure this uncertainty with probability theory due to insufficient data or lack of knowledge. Up to now, many theories have been proposed to deal with the epistemic uncertainty, such as convex model (Yang et al. 2015), fuzzy sets (Zadeh 1965; Shi et al. 2018), possibility theory (Zadeh 1999; Shi and Lu 2020), and evidence theory (Dempster 2008; Shafer 1976). Among all these epistemic uncertainty analysis theories, the evidence theory is more flexible and applicable than others in quantifying epistemic uncertainty, and it could be equivalent to probability theory, convex model, fuzzy sets, or possibility theory under different cases (Bae et al. 2004). Furthermore, the evidence theory requires few assumptions, which promotes it more flexible to deal with scarce information even conflicting information from different sources. Thus, this work focuses on reliability-based design optimization (RBDO) of time-dependent structure with both input aleatory and epistemic uncertainties, in which the aleatory uncertainty and epistemic one are quantified by probability and evidence theories respectively.
RBDO in the presence of probability input variable has been widely studied up to now. Many effective methods have been proposed to solve the RBDO problem, such as double-loop methods (Meng and Li 2016; Wu et al. 1990), decoupling methods (Du and Chen 2004; Huang et al. 2016), and single-loop methods (Liang et al. 2004; Choi et al. 2018) et al. The sequential optimization and reliability assessment (SORA) (Du and Chen 2004) is the well-known one among these methods, which converts the nested double-loop estimation process into a sequence of deterministic optimization and shifting vector calculation. The single-loop approach (SLA) (Liang et al. 2004) employs the Karush-Kuhn-Tucker (KKT) optimality condition to avoid the reliability analysis in the inner loop; thus, it is more efficient than the SORA. However, SLA may diverge since that the shifting vector is approximated by using the KKT optimality condition in each iteration. No matter the SORA or the SLA, the estimation of minimum performance target point (MPTP) is the key point. At present, a lot of MPTP searching techniques have been proposed, such as advanced mean value (AMV) (Wu et al. 1990), adjusted advanced mean value (AAMV) (Keshtegar and Hao 2016), modified mean value (MMV) (Keshtegar 2016), and hybrid descent mean value (HDMV) (Keshtegar and Hao 2018).
Time-dependent reliability-based design optimization (TRBDO) is employed to derive the optimal design parameter of structure with time-dependent characteristics. For the time-dependent structure in the presence of the probability input variable, Hu and Du (2015) extended the SORA in time-independent structure to decouple the TRBDO with input stationary stochastic process into a sequence optimization process. Jiang et al. (2017) proposed the time-invariant equivalent method (TIEM), in which the TRBDO is solved by a sequence of time-independent RBDO and time-dependent reliability analysis. Hawchar et al. (2018) established the time-variant RBDO using refined Kriging models simultaneously, in which the global Kriging surrogate models are built in an artificially augmented reliability space to approximate the performance functions of the probabilistic constraints. Shi et al. (2020a) proposed two advanced solution strategies respectively named time-dependent sequential optimization and reliability assessment (T-SORA) and time-dependent single-loop approach (T-SLA), in which two equivalent time-independent RBDOs are efficiently solved instead of original TRBDO. Other TRBDO methods with only probability input variable are shown in Refs. (Fang et al. 2018; Shi et al. 2019; Yu and Wang 2019).
At present, RBDO with evidence input variable has attracted widespread attention. Mourelatos and Zhou (2006) presented an efficient two-stage method for RBDO only with evidence input variable, in which the first stage performs the RBDO by treating the evidence input variable as random one following normal distribution, and then the second stage solves the original RBDO by using the obtained optimum in the first stage as the starting point. Huang et al. (2017) proposed a decoupling method for RBDO only with evidence input variable by converting original nested optimization into a sequential iterative process of design optimization and reliability analysis. In this method, the uniformity approach (Jiang et al. 2013) is used to transform the evidence variable into random one, and the first-order approximate reliability analysis method (FARM) (Zhang et al. 2015) is employed to perform the evidence theory–based reliability analysis. Zhang et al. (2018) presented an improved two-stage method, in which the equal area method (Xiao et al. 2015) is employed to convert the evidence variable into random one, and the SORA is used to solve the equivalent RBDO in the first stage. In the second stage, an improved algorithm is established to solve the original RBDO by treating the obtained optimum in the first stage as the initial point. Wang and Matthies (2018) proposed to employ the polynomial chaos expansion to approximate the real performance function so to solve the RBDO only with evidence input variable. Yang et al. (2019) combined the active global Kriging method with multidisciplinary strategy to solve the RBDO of multidisciplinary system with evidence input variable. However, these methods (Mourelatos and Zhou 2006; Huang et al. 2017; Jiang et al. 2013; Zhang et al. 2015, 2018; Xiao et al. 2015; Wang and Matthies 2018; Yang et al. 2019) were only suitable for the RBDO with evidence input variable. In engineering application, there usually exist mixed input uncertainties.
RBDO with mixed input uncertainties can deal with different uncertainties flexibly in one model, thus providing a more suitable design parameter for engineering structure. For the structure with both probability and evidence input variables, the unified uncertainty analysis model proposed by Du (2006, 2008) has been widely used in RBDO. Yao et al. (2013) proposed a sequential optimization and mixed uncertainty analysis method to solve the RBDO with probability and evidence input variables. In this method, the reliability target corresponding to the unified reliability solution of each constraint is decomposed into several reliability targets corresponding to probabilistic reliability solutions under different focal elements of the evidence variable. Zhang et al. (2019) established an incremental shifting vector and mixed uncertainty analysis method, in which a new allocation strategy is proposed to decompose the reliability target corresponding to the unified reliability solution of each constraint into the focal elements of evidence variable. Cid et al. (2019) proposed a fast convergence approximate method that can decouple the original RBDO with both probability and evidence input variables into a sequence of deterministic optimization and reliability analysis, in which the reliability analysis phase contains two separated but connected reliability analyses that handle probability and evidence variables respectively. For the TRBDO with probability and interval input variables, Shi et al. (2020b) established an efficient sequential single-loop optimization strategy. This strategy transforms the original nested multiple loop optimization into a sequential process of deterministic optimization, the estimation of the time instant and interval value corresponding to the worst case scenario, and the minimum performance target point searching. Other methods for solving the RBDO with mixed input uncertainties can be found in Refs. (Du et al. 2005; Wang et al. 2017; Xia et al. 2015).
The evidence theory is more flexible and applicable than convex model, fuzzy sets, and possibility theory in quantifying epistemic uncertainty, and it is common that time-dependent engineering structure exists both aleatory and epistemic uncertainties. Therefore, it is significant to study the TRBDO with both input aleatory and epistemic uncertainties, especially for the case that input aleatory and epistemic uncertainties are quantified by probability and evidence theories respectively. To the authors’ knowledge, there are few researches on TRBDO with probability and evidence input variables. The most common used method for solving the TRBDO with probability and evidence input variables is the general double nested optimization method (DNOM). DNOM solves this optimization problem with a double nested process, in which the outer loop solves the design parameter, and the inner loop estimates the unified time-dependent reliability. Once unified time-dependent reliability analysis requires many times of calling the real performance function, and DNOM requires multiple iterations, it thus needs multiple times of unified time-dependent reliability analysis, which leads to huge computational costs. Therefore, it is necessary to develop efficient method to solve the TRBDO with probability and evidence input variables.
This study focuses on establishing an accurate and efficient decoupling method called sequential optimization and unified time-dependent reliability analysis (SOUTRA) to solve the TRBDO with probability and evidence input variables. In the proposed SOUTRA, the original nested optimization process is solved by a sequence of unified time-dependent reliability analysis and deterministic optimization. By using SOUTRA, the original nested optimization process is firstly converted into a sequence of unified time-dependent reliability analysis, equivalent reliability target estimation, and time-independent RBDO at the initial time instant by treating the evidence variable as random one. Furthermore, a new probability transformation approach named focal element midpoint (FEM) is proposed to convert the evidence variable into random one. It should be noted that the number of unified time-dependent reliability analysis during the optimization process affects the total computational cost seriously. In the proposed SOUTRA, only few numbers of unified time-dependent reliability analysis are required to derive the optimum; thus, the proposed SOUTRA is efficient in solving the TRBDO with probability and evidence input variables.
The outline of this article is summarized as follows. Some basic definitions are given in Section 2. A new probability transformation method is established in Section 3 to convert the evidence variable into random one. The advanced decoupling strategy called SOUTRA is proposed in Section 4. Estimation procedure of the SOUTRA is shown in Section 5. Applications are introduced in Section 6. Conclusions are drawn in Section 7.
2 Basic definitions
2.1 Evidence theory
Evidence theory is initially proposed by Dempster and Shafer; thus, it is also called Dempster-Shafer theory (Dempster 2008; Shafer 1976). After the evidence theory has been developed by several researchers, it has been demonstrated to be an efficient tool for dealing with the epistemic uncertainty. In the evidence theory, frame of discernment (FD) which is similar to the sample space of random variable in probability theory is a set of all identifiable possible realizations. For instance, if a FD is given as α = {α1, α2}, in which α1 and α2 are two mutually exclusive basic elements, then the power set of FD can be described by Ω(α) = {∅, {α1}, {α2}, {α1, α2}}, where ∅ means the empty set. The basic probability assignment (BPA) represents the confidence level of a proposition. Based on the definition of FD, the BPA can be assigned one by one to each subset in Ω(α) according to existing statistical information. The BPA (m : Ω(α) → [0, 1]) should satisfy the following three axioms:
in which m is the BPA of α. m(A) refers to the belief degree that is assigned to the set A, and each set ∀A ∈ Ω(α) satisfying m(A) ≥ 0 is called a focal element of m. The BPA m(A) represents the degree of focal element A being supported by the evidence, which is similar to the probability density function (PDF) of random variable in probability theory. Sometimes, information about α may come from different sources, and the BPA can be obtained by using the rules of combination (Sentz and Ferson 2002).
In evidence theory, the belief measure (Bel) and plausibility measure (Pl) are used to describe the credibility of the proposition B as follows:
where Bel(B) represents the summary of the BPAs that totally agree with the proposition B, and Pl(B) means the summary of the BPAs that agree with the proposition B totally or partially. Measures Bel(B) and Pl(B) can be regarded as the lower and upper bounds of probability measure. With the increasing information of input uncertainty variables, Bel(B), Pl(B), and probability measure will approach the same value.
In this work, it is supposed that the evidence input vector is expressed as \( \mathbf{W}={\left\{{W}_1,{W}_2,\dots, {W}_{n_W}\right\}}^{\mathrm{T}} \), in which nW is the size of the evidence input variables, and all these evidence input variables are independent with each other. Denote the power set of FD of the jth evidence variable Wj(j = 1, 2, …, nW) as Ω(Wj)(j = 1, 2, …, nW), and the ijth focal element in Ω(Wj) is expressed as \( {\mathrm{A}}_j^{i_j}\left({i}_j=1,2,\dots, {n}_{W_j};j=1,2,\dots, {n}_W\right) \), in which \( {n}_{W_j} \) is the number of focal element of the evidence variable Wj. The joint possible set Ω(W) can be obtained by using the Cartesian product as follows:
where \( {\mathrm{A}}^l\left(l=1,2,\dots, \prod \limits_{j=1}^{n_W}{n}_{W_j}\right) \) are the lth focal elements of Ω(W). Furthermore, the joint BPA of evidence input variables can be obtained by
in which \( {m}_j\left({\mathrm{A}}_j^{i_j}\right) \) and m(Al) are the BPAs of \( {\mathrm{A}}_j^{i_j}\left({i}_j=1,2,\dots, {n}_{W_j};j=1,2,\dots, {n}_W\right) \) and \( {\mathrm{A}}^l\left(l=1,2,\dots, \prod \limits_{j=1}^{n_W}{n}_{W_j}\right) \) respectively.
2.2 Unified time-dependent reliability analysis with probability and evidence variables
For the time-dependent structure with probability and evidence input variables, its performance function can be expressed as g(Z, Y(t), W, t), where Z represents the nZ-dimensional random input vector, Y(t) is the nY-dimensional stochastic process input vector, W is the nW-dimensional evidence input vector, and t ∈ [t0, te] is the time parameter. For the time-independent structure with probability and evidence input variables, the unified reliability analysis model proposed by Du (2006, 2008) has been widely used in engineering application. This work extends this model to time-dependent structure. Denote the safety region of this time-dependent structure as follows:
Then, the unified time-dependent Bel and Pl can be defined by
where \( {n}_{JFM}=\prod \limits_{j=1}^{n_W}{n}_{W_j} \) represents the number of joint focal element in Ω(W). \( \underset{\mathbf{W}\in {\mathrm{A}}^l}{\min }g\left(\mathbf{Z},\mathbf{Y}(t),\mathbf{W},t\right) \) and \( \underset{\mathbf{W}\in {\mathrm{A}}^l}{\max }g\left(\mathbf{Z},\mathbf{Y}(t),\mathbf{W},t\right) \) represent the minimum and maximum values of performance function with respect to W in the joint focal element Al. Therefore, the final values of Bel(S) and Pl(S) are the sum of sub-beliefs and sub-plausibilities associated with each joint focal element respectively.
If the information about the evidence variable input vector W is sufficient, then it can be described by random input vector, and the time-dependent reliability R can be estimated. Actually, the relationship between belief measure Bel(S), plausibility measure Pl(S), and the time-dependent reliability R can be expressed as follows:
The above equation illustrates that Bel(S) reflects the worst case scenario of the time-dependent structure. Therefore, the time-dependent Bel(S) will be employed to measure the safety degree of constraint functions for constructing the TRBDO model with both probability and evidence input variables in the next section.
2.3 TRBDO with probability and evidence variables
Based on above analysis, the TRBDO model with both probability and evidence input variables is described by
where f(d, μX) is the objective function of the optimization problem to be minimized; gi(d, Z, Y(t), W, t)(i = 1, 2, …, ng) is the time-dependent performance function of the ith probabilistic constraint; d is the nd-dimensional deterministic design parameter vector with dL and dU being its lower and upper bounds, respectively; X is the nX-dimensional random design vector with mean value vector μX, and lower and upper bounds of μX being \( {\boldsymbol{\upmu}}_X^L \) and \( {\boldsymbol{\upmu}}_X^U \), respectively; P is the nP-dimensional random parameter vector; Y(t) is the nY-dimensional input stochastic process vector; W is the nW-dimensional evidence input vector; \( {\mathrm{R}}_i^{tar}\left(i=1,2,\dots, {n}_g\right) \) are the reliability target of the ith probabilistic constraint.
3 New probability transformation method for the evidence variable
Before constructing the SOUTRA, a new probability transformation method is proposed to convert the evidence variable into random one. In our problem, the focal elements of each evidence variable are all closed intervals. At present, uniformity approach (Jiang et al. 2013) and equal area method (Xiao et al. 2015) are two most used methods for converting the evidence variable into random one. The uniformity approach assumes a uniform distribution whose integral is equal to the corresponding BPA over the interval of the focal element. For the jth evidence variable Wj(j = 1, 2, …, nW) with its ijth focal element \( {\mathrm{A}}_j^{i_j}\left({i}_j=1,2,\dots, {n}_{W_j};j=1,2,\dots, {n}_W\right) \), we suppose that the lower bound and upper bound of the focal element \( {\mathrm{A}}_j^{i_j} \) is expressed as \( {\mathrm{A}}_j^{i_jL} \) and \( {\mathrm{A}}_j^{i_jU} \) respectively. Then, the PDF \( {f}_{{\tilde{W}}_j}^{UA}\left({\tilde{w}}_j\right) \) of transformed random variable \( {\tilde{W}}_j \) corresponding to the evidence variable Wj based on the uniformity approach is expressed by
in which \( {m}_j\left({\mathrm{A}}_j^{i_j}\right) \) is the BPA of \( {\mathrm{A}}_j^{i_j} \). \( {\delta}_j\left({\tilde{w}}_j\right) \) is the indicator function with \( {\delta}_j\left({\tilde{w}}_j\right)=1 \) when \( {\tilde{w}}_j\in {\mathrm{A}}_j^{i_j} \) and \( {\delta}_j\left({\tilde{w}}_j\right)=0 \) otherwise. Actually, the obtained PDF \( {f}_{{\tilde{W}}_j}^{UA}\left({\tilde{w}}_j\right) \) is a piecewise function, which may introduce some issues in the subsequent calculation.
The equal area method constructs the PDF \( {f}_{{\tilde{W}}_j}^{EAM}\left({\tilde{w}}_j\right) \) of transformed random variable \( {\tilde{W}}_j \) by assigning probability densities at the interval bounds of focal elements. Then, \( {f}_{{\tilde{W}}_j}^{EAM}\left({\tilde{w}}_j\right) \) can be obtained by connecting these probability density points with different straight lines. The probability densities at the interval bounds of focal elements \( {\mathrm{A}}_j^{i_j} \) can be obtained by
It should be noted that \( {\mathrm{A}}_j^{1L} \) is the minimum interval bound value of evidence variable Wj, and the size relationship among all these focal elements is \( {\mathrm{A}}_j^1<{\mathrm{A}}_j^2<\dots <{\mathrm{A}}_j^{n_{w_j}} \).
Actually, the PDF obtained by the uniformity approach or the equal area method may be unsuitable or wrong in some cases. For instant, suppose the evidence variable Wj has three focal elements, i.e., \( {\mathrm{A}}_j^1,{\mathrm{A}}_j^2,{\mathrm{A}}_j^3 \), and the corresponding intervals and BPAs are \( \left[{\mathrm{A}}_j^{1L},{\mathrm{A}}_j^{1U}\right]=\left[1,1.2\right] \), \( \left[{\mathrm{A}}_j^{2L},{\mathrm{A}}_j^{2U}\right]=\left[1.2,1.8\right] \), \( \left[{\mathrm{A}}_j^{3L},{\mathrm{A}}_j^{3U}\right]=\left[1.8,2\right] \), and \( {m}_j\left({\mathrm{A}}_j^1\right)=0.3 \), \( {m}_j\left({\mathrm{A}}_j^2\right)=0.5 \), and \( {m}_j\left({\mathrm{A}}_j^3\right)=0.2 \) respectively. Now that \( {m}_j\left({\mathrm{A}}_j^2\right)>{m}_j\left({\mathrm{A}}_j^1\right)>{m}_j\left({\mathrm{A}}_j^3\right) \), thus, there will be more possibility to select the value of evidence variable Wj in the second focal element, then the first focal element, and last the third focal element. In other words, if the PDF is constructed, it should provide the biggest value in the interval of the second focal element, middle value in the interval of the first focal element, and smallest value in the interval of the third focal element. The obtained PDFs by employing these two methods are shown in Fig. 1. From Fig. 1 a, one can see that the obtained PDF \( {f}_{{\tilde{W}}_j}^{UA}\left({\tilde{w}}_j\right) \) has the biggest value in the interval of the first focal element, middle value in the interval of the third focal element, and smallest value in the interval of second focal element. This is not consistent with the BPAs. Therefore, the obtained PDF \( {f}_{{\tilde{W}}_j}^{UA}\left({\tilde{w}}_j\right) \) based on the uniformity approach is not suitable in this case. The PDF \( {f}_{{\tilde{W}}_j}^{EAM}\left({\tilde{w}}_j\right) \) shown in Fig. 1 b obtained by using the equal area method is negative value in the vicinity of \( {\tilde{w}}_j=1.8 \). As we all know, the PDF must be non-negative; thus, the obtained PDF \( {f}_{{\tilde{W}}_j}^{EAM}\left({\tilde{w}}_j\right) \) based on the equal area method is wrong.

Transformed PDFs by using existing methods
In order to address the issues that may be encountered in the existing probability transformation methods, a new probability transformation method called the focal element midpoint (FEM) is established in this work. The FEM firstly employs the values of BPAs at every focal element midpoints to construct the approximate contour of the PDF, and then extends this contour to the PDF \( {f}_{{\tilde{W}}_j}^{FEM}\left({\tilde{w}}_j\right) \) based on the condition that the integral of \( {f}_{{\tilde{W}}_j}^{FEM}\left({\tilde{w}}_j\right) \) is equal to one. For the same example discussed above, the estimation process of the FEM can be explained by Fig. 2. Firstly, the points with abscissa being the different focal elements’ midpoint and ordinate being the corresponding BPAs are identified. At the same time, the points with abscissa being the minimum and maximum interval bound values of evidence variable Wj and ordinate being a half of corresponding BPAs are obtained. Secondly, connect these points with different straight lines to construct the approximate contour of PDF, which is shown in Fig. 2 by the dotted lines. Extend these points to the support points of the PDF with the same ratios among these points. As is shown in Fig. 2, if the ordinate of the first support point is supposed to be Δ, then the ordinate of other support points can be expressed as the functions of Δ. Thirdly, connect these support points with different straight lines to construct the curve of PDF, which is shown in Fig. 2 by the solid lines. The integral of the PDF can be expressed as the function of Δ, and Δ can be solved by setting the integral solution equal to one, which is the solution of the following equation:
where \( {\mathrm{A}}_j^{i_jS}=\frac{{\mathrm{A}}_j^{i_jU}-{\mathrm{A}}_j^{i_jL}}{2} \) is the dispersion of the focal element \( {\mathrm{A}}_j^{i_j}\left({i}_j=1,2,\dots, {n}_{W_j}\right) \). After the solution of Δ is done, the PDF \( {f}_{{\tilde{W}}_j}^{FEM}\left({\tilde{w}}_j\right) \) is identified. Figure 2 illustrates that the PDF \( {f}_{{\tilde{W}}_j}^{FEM}\left({\tilde{w}}_j\right) \) obtained by the proposed FEM can match well with the analysis solution based on BPAs, and thus avoids the issues existing in the uniformity approach and the equal areas method.

Transformed PDF by the proposed FEM method
If the midpoint of focal element \( {\mathrm{A}}_j^{i_j}\left({i}_j=1,2,\dots, {n}_{W_j}\right) \) is expressed as \( {\mathrm{A}}_j^{i_jM}=\frac{{\mathrm{A}}_j^{i_jL}+{\mathrm{A}}_j^{i_jU}}{2} \), then the PDF \( {f}_{{\tilde{W}}_j}^{FEM}\left({\tilde{w}}_j\right) \) of the proposed FEM can be expressed by
in which Δ can be solved by (13).
4 Advanced decoupling strategy for TRBDO with both probability and evidence variables
Directly solving the TRODO with both probability and evidence input variables is shown in (10); it requires a nested optimization process, which generally needs huge computational costs, especially when the unified time-dependent reliability analysis shown in (7) is involved in this process. For each constraint, once unified time-dependent reliability analysis requires nJFM times of time-dependent reliability analysis of structure with both probability and interval input uncertainties. Directly solving the optimization problem requires many times of unified time-dependent reliability analyses; thus, it is unaffordable in engineering application.
In order to reduce the computational cost, a new decoupling method called sequential optimization and unified time-dependent reliability analysis (SOUTRA) is proposed in this section. In the proposed SOUTRA, the original nested optimization process is transformed into a sequential of unified time-dependent reliability analysis, updated reliability index target estimation, and time-independent RBDO calculation. Furthermore, in order to solve the transformed time-independent RBDO, the SORA (Du and Chen 2004) is employed to convert this time-independent RBDO into equivalent deterministic optimization so to further save the computational cost. The flowchart of the proposed SOUTRA is shown in Fig. 3. In this figure, the part of unified time-dependent reliability analysis corresponds to (7) and (23), updated reliability index target estimation corresponds to (19), and time-independent RBDO calculation corresponds to (18). Using SORA to transform the time-independent RBDO into equivalent deterministic optimization corresponds to (20). The details of the proposed SOUTRA are shown below.

The flowchart of the proposed SOUTRA
Firstly, let us consider the following time-independent RBDO only with probability input variables
in which \( \tilde{\mathbf{W}} \) is the transformed random variable vector of the evidence one W based on the established FEM method, and t0 is the initial time instant of time parameter. It is no doubt that the optimum of this time-independent RBDO will make the time-independent constraint functions satisfy the reliability targets, i.e., \( {\beta}_i\left({t}_0\right)\ge {\beta}_i^{tar}\left(i=1,2,\dots, {n}_g\right) \), in which βi(t0) and \( {\beta}_i^{tar}={\Phi}^{-1}\left({\mathrm{R}}_i^{tar}\right) \) are the reliability index and the equivalent reliability index target of the ith time-independent constraint function, where Φ−1(·) is the inverse function of the standard normal cumulative distribution function. βi(t0) can be estimated by
where \( \mathbf{u}={\left\{{\mathbf{u}}_{\mathbf{X}},{\mathbf{u}}_{\mathbf{P}},{\mathbf{u}}_{\mathbf{Y}\left({t}_0\right)},{\mathbf{u}}_{\tilde{\mathbf{W}}}\right\}}^{\mathrm{T}} \) is the realization of standard normal random variable vector \( \mathbf{U}={\left\{{\mathbf{U}}_{\mathbf{X}},{\mathbf{U}}_{\mathbf{P}},{\mathbf{U}}_{\mathbf{Y}\left({t}_0\right)},{\mathbf{U}}_{\tilde{\mathbf{W}}}\right\}}^{\mathrm{T}} \) transformed from the random variable vector \( {\left\{\mathbf{X},\mathbf{P},\mathbf{Y}\left({t}_0\right),\tilde{\mathbf{W}}\right\}}^{\mathrm{T}} \) by equivalent probability transformation, and Gi(·) is the ith constraint function in the standard normal space.
In the considered optimization problem shown in (10), the final optimum must make the unified time-dependent reliability solution of each constraint satisfy the corresponding reliability target, i.e., \( {\mathrm{Bel}}^{g_i}\left(\mathrm{S}\right)\ge {\mathrm{R}}_i^{tar}\left(i=1,2,\dots, {n}_g\right) \). Based on the definition of equivalent time-dependent reliability index (Shi et al. 2020a), the equivalent unified time-dependent reliability index can be defined as follows:
It is easy to understand that \( {\mathrm{Bel}}^{g_i}\left(\mathrm{S}\right)\ge {\mathrm{R}}_i^{tar}\left(i=1,2,\dots, {n}_g\right) \) is equivalent to \( {\beta}_{i\mathrm{UT}}\ge {\beta}_i^{tar}\left(i=1,2,\dots, {n}_g\right) \). Thus, if \( {\beta}_{i\mathrm{UT}}\ge {\beta}_i^{tar}\left(i=1,2,\dots, {n}_g\right) \), then the unified time-dependent reliability solution of each constraint satisfies the corresponding reliability target.
In order to make the optimum of (15) satisfy the requirements of the original optimization problem shown in (10), an updated reliability index target \( {\beta}_i^{tar(k)} \) corresponding to the kth iteration of the ith constraint function is constructed in this work. The time-independent RBDO shown in (15) is rewritten as follows:
in which Φ(·) is the standard normal cumulative distribution function. Therefore, in the kth iteration, the optimum of this time-independent RBDO will satisfy \( {\beta}_i^{(k)}\left({t}_0\right)\ge {\beta}_i^{tar(k)}\left(i=1,2,\dots, {n}_g\right) \), in which \( {\beta}_i^{(k)}\left({t}_0\right) \) is the time-independent reliability index of the ith constraint function in the kth iteration. The updated reliability index target \( {\beta}_i^{tar(k)} \) is expressed by
where \( {\beta}_{i\mathrm{UT}}^{(k)} \) is the equivalent unified time-dependent reliability index of the ith constraint function in the kth iteration.
Equation (19) can be rephrased as \( {\beta}_i^{(k)}\left({t}_0\right)={\beta}_i^{tar(k)}+{\beta}_{i\mathrm{UT}}^{(k)}-{\beta}_i^{tar} \). After the kth iteration, the optimum of the time-independent optimization problem shown in (18) will satisfy \( {\beta}_i^{(k)}\left({t}_0\right)\ge {\beta}_i^{tar(k)}\left(i=1,2,\dots, {n}_g\right) \). That is to say, \( {\beta}_i^{tar(k)}+{\beta}_{i\mathrm{UT}}^{(k)}-{\beta}_i^{tar}\ge {\beta}_i^{tar(k)}\left(i=1,2,\dots, {n}_g\right) \) will be satisfied, and we can further obtain that \( {\beta}_{i\mathrm{UT}}^{(k)}\ge {\beta}_i^{tar}\left(i=1,2,\dots, {n}_g\right) \). This illustrates that the optimum of (18) will make the constraints of original optimization problem shown in (10) satisfy reliability targets. Therefore, we can estimate the optimum of TRBDO with both probability and evidence input variables, by solving the time-independent RBDO only with probability input variables.
In this work, the equivalent time-independent RBDO shown in (18) is solved by the SORA (Du and Chen 2004). Based on the SORA, the following equivalent deterministic optimization is constructed
in which μP, \( {\boldsymbol{\upmu}}_{\mathbf{Y}\left({t}_0\right)} \), and \( {\boldsymbol{\upmu}}_{\tilde{\mathbf{W}}} \) represent the mean vectors of random parameter vector P, stochastic process vector Y(t0) at initial time instant t0, and transformed random variable \( \tilde{\mathbf{W}} \) respectively. \( {\mathbf{M}}_i^{(k)} \) is the shifting vector of the kth iteration
where \( {\boldsymbol{\upmu}}_{\mathbf{S}}^{\left(k-1\right)} \) and \( {\mathbf{s}}_{i\mathrm{MPTP}}^{\left(k-1\right)} \) are the mean value vector and MPTP in the (k − 1)th iteration in the original probability space. \( {\mathbf{s}}_{i\mathrm{MPTP}}^{\left(k-1\right)} \) is converted by the MPTP \( {\mathbf{u}}_{i\mathrm{MPTP}}^{\left(k-1\right)} \) in the standard normal space based on the equivalent probability transformation. \( {\mathbf{u}}_{i\mathrm{MPTP}}^{\left(k-1\right)} \) is estimated by
In each iteration, the improved time-variant reliability analysis–based stochastic process discretization (iTRPD) (Jiang et al. 2018) is extended to estimate the unified time-dependent reliability \( {\mathrm{Bel}}^{g_i}(S)\left(i=1,2,\dots, {n}_g\right) \) for each constraint, and then βiUT(i = 1, 2, …, ng) can be obtained by (17). The iTRPD is an efficient method for estimating the time-dependent reliability, but it cannot be directly used to estimate the unified time-dependent reliability since unified time-dependent reliability analysis requires the minimum operation of the performance function with respect to the evidence variable. The iTRPD estimates the time-dependent reliability by combining the instantaneous reliability indexes at different time instants with the correlation among them. In this study, the minimum instantaneous reliability indexes βilmin(t∗)(i = 1, 2, …, ng; l = 1, 2, …, nJFM) at different time instants t∗ ∈ [t0, te] is combined by the iTRPD to estimate the sub-belief Belil(S)(i = 1, 2, …, ng; l = 1, 2, …, nJFM) associated to joint focal element Al. βilmin(t∗) can be obtained by
After the sub-belief Belil(S)(i = 1, 2, …, ng; l = 1, 2, …, nJFM) is obtained, the unified time-dependent reliability \( {\mathrm{Bel}}^{g_i}\left(\mathrm{S}\right)\left(i=1,2,\dots, {n}_g\right) \) can be gained by the combination of sub-beliefs shown in (7).
Above analysis shows that by using the proposed SOUTRA, the original nested optimization process is solved by a sequence of unified time-dependent reliability analysis, updated reliability index target estimation, and deterministic optimization. It should be noted that the number of the unified time-dependent reliability analysis during the optimization process affects the total computational cost seriously. In the proposed SOUTRA, the unified time-dependent reliability analysis is separated from the original nested optimization process, and only few numbers of the unified time-dependent reliability analysis are required; thus, it performs high computational efficiency.
5 Estimation procedure
The estimation procedure of the proposed SOUTRA for solving the TRBDO with both probability and evidence input variables is shown below. The convergence criterion of the proposed SOUTRA is set to be the relative errors of two adjacent objective performances do not exceed \( {\varepsilon}_0^f={10}^{-3} \).
-
Step 1:
Initial \( {\mathbf{u}}_{i\mathrm{MPTP}}^{(0)} \), d(0), \( {\boldsymbol{\upmu}}_{\mathbf{S}}^{(0)} \), and estimate \( {f}_{\mathrm{min}}^{(0)}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right) \), and let k = 1.
-
Step 2:
Employ (23) to estimate the minimum instantaneous reliability indexes βilmin(t∗)(i = 1, 2, …, ng; l = 1, 2, …, nJFM), and use iTRPD to calculate the sub-beliefs Belil(S)(i = 1, 2, …, ng; l = 1, 2, …, nJFM). Obtain the unified time-dependent reliability \( {\mathrm{Bel}}^{g_i}\left(\mathrm{S}\right)\left(i=1,2,\dots, {n}_g\right) \) by (7).
-
Step 3:
Use (17) to transform unified time-dependent reliability \( {\mathrm{Bel}}^{g_i}\left(\mathrm{S}\right)\left(i=1,2,\dots, {n}_g\right) \) to equivalent unified time-dependent reliability index βiUT(i = 1, 2, …, ng).
-
Step 4:
Estimate the time-independent reliability index \( {\beta}_i^{(k)}\left({t}_0\right) \) by (16).
-
Step 5:
Employ (19) to estimate the updated reliability index target \( {\beta}_i^{tar(k)} \).
-
Step 6:
Calculate the MPTP \( {\mathbf{u}}_{i\mathrm{MPTP}}^{\left(k-1\right)} \) in the standard normal space by (22), and transform it into original probability space \( {\mathbf{s}}_{i\mathrm{MPTP}}^{\left(k-1\right)} \). Use (21) to estimate the shifting vector \( {\mathbf{M}}_i^{(k)} \).
-
Step 7:
Solve the deterministic optimization shown in (20) to obtain updated mean value vector \( {\boldsymbol{\upmu}}_{\mathbf{S}}^{(k)} \) and the objective performance \( {f}_{\mathrm{min}}^{(k)}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right) \).
-
Step 8:
Calculate \( {\varepsilon}_f^{(k)}=\left|\frac{f_{\mathrm{min}}^{(k)}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right)-{f}_{\mathrm{min}}^{\left(k-1\right)}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right)}{f_{\mathrm{min}}^{(k)}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right)}\right| \). If \( {\varepsilon}_f^{(k)}\le {\varepsilon}_0^f \), go to step 9; else, let k = k + 1 and go to step 2.
-
Step 9:
Output the finial optimum \( \left\{{\mathbf{d}}^{final},{\boldsymbol{\upmu}}_{\mathbf{X}}^{final}\right\}=\left\{{\mathbf{d}}^{(k)},{\boldsymbol{\upmu}}_{\mathbf{X}}^{(k)}\right\} \) and objective function value \( {f}_{\mathrm{min}}^{final}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right)={f}_{\mathrm{min}}^{(k)}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right) \).
6 Applications
Several examples involving numerical and engineering applications are introduced in this section to show the effectiveness of the proposed SOUTRA for solving TRBDO problem with both probability and evidence input variables. General double nested optimization method (DNOM) is employed to be the reference. DNOM is a direct calculation method, which makes the unified time-dependent reliability constraint as its nonlinear constraint, and the objective function as its optimization objection. That is to say, DNOM solves this optimization problem with a double nested process, in which the outer loop solves the design parameter, and the inner loop estimates the unified time-dependent reliability. All this process is intrusive in the optimization toolbox, i.e., Fmincon toolbox in Matlab. In order to solve this problem, Fmincon toolbox needs to call the nonlinear constraint many times, and each invocation requires once unified time-dependent reliability analysis for every probability constraints.
6.1 Numerical example
Considering the following TRBDO with probability and evidence input variable
in which \( {X}_1\sim N\left({\mu}_{X_1},0.6\right) \) and \( {X}_2\sim N\left({\mu}_{X_2},0.6\right) \), and t ∈ [0, 5] is the time parameter. Wis the evidence variable with the BPA structure listing in Table 1.
The initial design parameters are set to be \( \left[{\mu}_{X_1}^{(0)},{\mu}_{X_2}^{(0)}\right]=\left[5,5\right] \) for this example. The optimization solutions estimated by the proposed SOUTRA and DNOM are listed in Table 2. In this example, evidence variable W is involved in the first two constraints. Thus, unified time-dependent reliability analysis is required in the optimization process for the first two constraints, and general time-dependent reliability is analyzed in the optimization process for the third constraint. From Table 2, one can see that the design parameter solutions estimated by the proposed SOUTRA can match well with those of the DNOM, which illustrates the computational accuracy of the proposed SOUTRA. The solutions also show that the final unified time-dependent reliabilities of the first two constraints equal to the reliability targets, i.e., \( {\mathrm{Bel}}^{g_1}\left(\mathrm{S}\right)={\mathrm{Bel}}^{g_2}\left(\mathrm{S}\right)={\mathrm{R}}_i^{tar}\left(i=1,2\right) \), and the time-dependent reliability of the third constraint larger than the reliability target, i.e., \( {\mathrm{R}}_3>{\mathrm{R}}_3^{tar} \). This illustrates that the first two constraints are the active constraints and the third constraint is the inactive one.
There are three focal elements for the evidence variable W; thus, it requires 2 × 3 + 1 = 7 times of time-dependent reliability analysis in each iteration for the proposed SOUTRA. There are 4 times of iteration for the proposed SOUTRA to derive the optimum; thus, the proposed SOUTRA needs 7 × 4 = 28 times of time-dependent reliability analysis. However, the DNOM requires 119 times of iteration with total 833 times of time-dependent reliability analysis. Actually, decreasing the number of time-dependent reliability analysis will improve the computational efficiency, which can be seen from Table 2 that 833 and 28 times of time-dependent reliability analysis corresponds to 771,394 and 26,024 times of calling the performance functions respectively. The solutions also show that the most calculations of the proposed SOUTRA come from the time-dependent reliability analysis during the optimization process, i.e., 26,024 times of calling performance functions for time-dependent reliability analysis, and 26,941 times of calling performance functions totally. It is worth to note that by using the proposed SOUTRA, the original nested optimization process is solved by a sequence of unified time-dependent reliability analysis, updated reliability index target estimation, and deterministic optimization. Nreliability represents the computational cost of the part of unified time-dependent reliability analysis, and Nall means the computational cost of all these three parts. In summary, the proposed SOUTRA can improve the computational efficiency comparing with the DNOM.
Convergence history of design parameters shown in Fig. 4 illustrates that the initial design parameters are larger than the optimum, with the corresponding unified time-dependent reliabilities of the first two constraints larger than the reliability target, and the time-dependent reliability of the third constraint smaller than the reliability target shown in Fig. 5. At the same time, the objective performance at the initial design parameters is larger than the optimized objective value shown in Fig. 6. k represents the number of iteration in all these figures. Based on the proposed SOUTRA, all these solutions converge to the optimums as the iteration increases to the fourth iteration. Figure 7 shows that under the final design parameter solutions, as the increase of the time interval upper bound, the unified time-dependent reliabilities of each constraint are decreasing, which is consistent with the deterioration of time-dependent structure. At final time interval upper bound, i.e., te = 5, the unified time-dependent reliabilities of each constraint reach to their corresponding solutions shown in Table 2.

Convergence history of design parameters for example 6.1

Convergence history of unified time-dependent reliability solutions for example 6.1

Convergence history of objective performance for example 6.1

Curves of unified time-dependent reliabilities under the final design parameter solutions varying with time interval upper bound for example 6.1
In order to show the effectiveness and accuracy of the proposed FEM, optimization solutions based on different probability transformation methods are estimated and shown in Table 3. SOUTRA_UA and SOUTRA_EAM represent the methods that combine the proposed decoupling strategy with uniformity approach and equal areas method respectively. The maximum iteration number is set to be 10 for all these methods. For the case of BPAs A1/A2/A3 being 5%/15%/80%, the solutions show that only the SOUTRA with FEM is convergent; SOUTRA_UA and SOUTRA_EAM are divergent. For this case, convergence histories of design parameters, unified time-dependent reliability solutions, and objective performance are shown in Figs. 8, 9, and 10 respectively. The transformed PDFs by uniformity approach, equal area method, and FEM method are shown in Fig. 11. Figure 11 shows that although the transformed PDFs obtained by uniformity approach and equal area method are consistent with the BPA structures, they failed to give the accurate design parameters. For the case of BPAs A1/A2/A3 being 10%/15%/75%, the solutions show that SOUTRA_EAM and SOUTRA with FEM are convergent; SOUTRA_UA is divergent. For this case, convergence histories of design parameters, unified time-dependent reliability solutions, and objective performance are shown in Figs. 12, 13, and 14 respectively. The transformed PDFs by uniformity approach, equal area method, and FEM method are shown in Fig. 15. Furthermore, for the case of BPAs A1/A2/A3 being 20%/25%/55%, the solutions show that SOUTRA_UA and SOUTRA with FEM are convergent; SOUTRA_EAM is failed. For this case, convergence histories of design parameters, unified time-dependent reliability solutions, and objective performance are shown in Figs. 16, 17, and 18 respectively. The transformed PDFs by uniformity approach, equal area method, and FEM method are shown in Fig. 19. Figures 16, 17, and 18 show that convergence histories of these solutions are similar based on SOUTRA_UA and SOUTRA respectively. From Fig. 19, one can see that there exists negative value in the transformed PDF based on equal area method; thus, the optimization cannot be carried out and SOUTRA_EAM is failed in this case. For these three cases, SOUTRA_UA is divergent in two cases, and SOUTRA_EAM is divergent once and failed once. At the same time, the proposed decoupling strategy combined with FEM is convergent in all these three cases, which illustrates the effectiveness and robustness of the established FEM.

Convergence history of design parameters for BPAs being 5%/15%/80%

Convergence history of unified time-dependent reliability solutions for BPAs being 5%/15%/80%

Convergence history of objective performance for BPAs being 5%/15%/80%

Transformed PDFs by uniformity approach, equal area method, and FEM method for BPAs being 5%/15%/80%

Convergence history of design parameters for BPAs being 10%/15%/75%

Convergence history of unified time-dependent reliability solutions for BPAs being 10%/15%/75%

Convergence history of objective performance for BPAs being 10%/15%/75%

Transformed PDFs by uniformity approach, equal area method, and FEM method for BPAs being 10%/15%/75%

Convergence history of design parameters for BPAs being 20%/25%/55%

Convergence history of unified time-dependent reliability solutions for BPAs being 20%/25%/55%

Convergence history of objective performance for BPAs being 20%/25%/55%

Transformed PDFs by uniformity approach, equal area method, and FEM method for BPAs being 20%/25%/55%
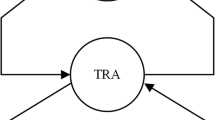
6.2 A two-bar frame
A two-bar frame (Shi et al. 2020a) shown in Fig. 20 is modified to illustrate the effectiveness of the proposed SOUTRA for solving the TRBDO with both probability and evidence input variables. The two-bar frame is subjected to a dynamic stochastic process force F(t). The structure is considered to be failure when the maximum stress of the bars is higher than the corresponding yield strength, and the objective is to minimize the weight of this frame. The yield strength of the two bars is expressed as S1(t) = S01 exp(−0.01t) and S2(t) = S02 exp(−0.01t), where S01 and S02 are the initial yield strengths of the two bars respectively. The sectional areas D1 and D2, and the initial yield strengths S01 and S02, are supposed to be random variables which distribution parameters are shown in Table 4. The lengths l1 and l2 of the two bars are regarded to be evidence variables, and the corresponding BPAs of these two evidence variables are shown in Table 5. The TRBDO of this two-bar frame is described by
in which the considered time interval is [0, 10] year.

A two-bar frame
The initial design parameters are set to be \( \left[{\mu}_{D_1}^{(0)},{\mu}_{D_2}^{(0)}\right]=\left[0.15,0.15\right] \) to this example. The optimization solution of the proposed SOUTRA has a bit error when using the suggested convergence criterion, i.e., \( {\varepsilon}_0^f={10}^{-3} \); thus, the optimization solution with a more strict convergence criterion, i.e., \( {\varepsilon}_0^f={10}^{-4} \), is also provided. The solutions listed in Table 6 show that the finial unified time-dependent reliability of the first constraint is smaller than the reliability target, i.e., \( {\mathrm{Bel}}^{g_1}\left(\mathrm{S}\right)<{\mathrm{R}}_1^{tar} \), when using the convergence criterion \( {\varepsilon}_0^f={10}^{-3} \). This illustrates that the final design parameters under this convergence criterion cannot make the first constraint satisfy the reliability target, although it just needs 3 times of iteration. The design parameters under the strict convergence criterion can make the two constraints satisfy the reliability targets, i.e., \( {\mathrm{Bel}}^{g_1}\left(\mathrm{S}\right)={\mathrm{R}}_1^{tar} \) and \( {\mathrm{Bel}}^{g_2}\left(\mathrm{S}\right)={\mathrm{R}}_2^{tar} \), which can also match well with those of the DNOM. This demonstrates the high computational accuracy of the proposed SOUTRA.
There are two evidence variables with 3 and 2 focal elements respectively; thus, the number of joint focal element is 3 × 2 = 6. For the proposed SOUTRA, it needs 2 × 6 = 12 times of time-dependent reliability analysis in each iteration, and the total numbers of time-dependent reliability analysis are 3 × 12 = 36 and 4 × 12 = 48 for the proposed SOUTRA with convergence criterions \( {\varepsilon}_0^f={10}^{-3} \) and \( {\varepsilon}_0^f={10}^{-4} \) respectively. The DNOM requires 22 times of iteration with 22 × 12 = 264 times of time-dependent reliability analysis, which are far more than those of the proposed SOUTRA. At the same time, the total computational costs of the proposed SOUTRA with convergence criterions \( {\varepsilon}_0^f={10}^{-3} \) and \( {\varepsilon}_0^f={10}^{-4} \) are almost one-eighth and one-sixth of those caused by the DNOM. Therefore, the proposed SOUTRA is an efficient method for solving the TRBDO with both input probability and evidence variables.
The convergence histories of design parameters, unified time-dependent reliability solutions, and objective performance under the convergence criterion \( {\varepsilon}_0^f={10}^{-4} \) are shown in Figs. 21, 22, and 23 respectively. It can be seen from these figures that the initial design parameters are smaller than the optimized ones, and the corresponding unified time-dependent reliabilities and objective performance are smaller than the final ones at the initial design parameters. All these solutions converge to the optimized ones at the fourth iteration by employing the proposed SOUTRA, which illustrates the good convergence characteristic of the proposed SOUTRA. Figure 24 shows that under the final design parameter solutions, as the increase of the time interval upper bound, the unified time-dependent reliabilities of each constraint are decreasing, which is consistent with the deterioration of time-dependent structure. At the final time interval upper bound, i.e., te = 10, the unified time-dependent reliabilities of each constraint reach to their corresponding solutions shown in Table 6.

Convergence history of design parameters for example 6.2

Convergence history of unified time-dependent reliability solutions for example 6.2

Convergence history of objective performance for example 6.2

Curves of unified time-dependent reliabilities under the final design parameter solutions varying with time interval upper bound for example 6.2
6.3 A self-balancing vehicle
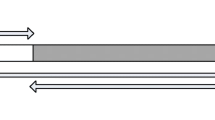
In order to illustrate the effectiveness of the proposed SOUTRA in engineering application, a self-balancing vehicle (Shi et al. 2020b) is employed to be an example. As is shown in Fig. 25, the design of the chassis is a key part in the whole design process of this self-balancing vehicle. The design of the chassis has a significant impact on the overall performance of the vehicle and the life safety of the driver. Considering the uncertainty of the size, the design variables are mean values of the width \( {\mu}_{X_1} \) and the depth \( {\mu}_{X_2} \) of the chassis. In order to make the vehicle more stable in the driving process, maximizing the area of the chassis upper surface is the design goal. The deformations of the chassis under two cases of loads are considered the constraints: case 1 is the deformation \( {D}_{Y_1} \) of the chassis under equal pressure Y1(t) should less than the allowable value \( {D}_1^{allow} \), i.e., \( {D}_{Y_1}\le {D}_1^{allow} \), so to ensure the driving stability under the condition of turn; case 2 is the deformation \( {D}_{Y_2} \) of the chassis under the load Y2(t) which is in the vertical direction of Y1(t) should less than the allowable value \( {D}_2^{allow} \), i.e., \( {D}_{Y_2}\le {D}_2^{allow} \), so to ensure the driving stability under the condition of acceleration.

The self-balancing vehicle
The finite element model analysis processes under these two cases are shown in Fig. 26. It is assumed that the chassis performance degrades with time; thus, the allowable deformation decreases with time accordingly, i.e., \( {D}_1^{allow}={D}_1\exp \left(-0.002t\right) \) and \( {D}_2^{allow}={D}_2\exp \left(-0.002t\right) \). According to the specialist experience, D1 and D2 are assumed to be two evidence variables. The T-RBDO model for the self-balancing vehicle is shown below
in which E is the elastic modulus. The distribution parameters of the input random variables and stochastic processes are shown in Table 7. The BPA structure of the evidence variables is shown in Table 8. The considered time duration is t ∈ [0, 12]month.

Two cases with different loads
The initial design parameters are set to be \( \left[{\mu}_{X_1}^{(0)},{\mu}_{X_2}^{(0)}\right]=\left[440,220\right] \) to this example. The optimization solutions estimated by the proposed SOUTRA and DNOM are listed in Table 9. From Table 9, one can see that the design parameters estimated by the proposed SOUTRA can match well with those of the DNOM, which illustrates the accuracy of the proposed SOUTRA. At the final design parameters, the unified time-dependent reliability solutions of these two constraints equal to the reliability targets, i.e., \( {\mathrm{Bel}}^{g_1}\left(\mathrm{S}\right)={\mathrm{R}}_1^{tar} \) and \( {\mathrm{Bel}}^{g_2}\left(\mathrm{S}\right)={\mathrm{R}}_2^{tar} \). This means that these two constraints are active constraints.
Two evidence variables with 2 and 3 focal elements respectively are involved in this optimization problem. The number of joint focal element is 2 × 3 = 6. In the proposed SOUTRA, 2 × 6 = 12 times of time-dependent reliability analysis are needed in each iteration. Therefore, the total number of time-dependent reliability analysis is 4 × 12 = 48 for the proposed SOUTRA. However, the DNOM requires 16 times of iteration with 16 × 12 = 192 times of time-dependent reliability analysis, which are far more than those of the proposed SOUTRA. Furthermore, the total computational costs of the proposed SOUTRA are about one-fourth of those of the DNOM, which demonstrates the high computational efficiency of the proposed SOUTRA.
The convergence histories of the design parameters, unified time-dependent reliability solutions, and objective performance are shown in Figs. 27, 28, and 29 respectively. These figures indicate that these solutions converge fast by using the proposed SOUTRA, which manifests the good convergence characteristic of the proposed SOUTRA. Under the final design parameter solutions, unified time-dependent reliabilities varying with time interval upper bound are shown in Fig. 30. Figure 30 shows that as the increase of the time interval upper bound, the unified time-dependent reliabilities of each constraint are decreasing, which is consistent with the deterioration of time-dependent structure. At the final time interval upper bound, i.e., te = 12, the unified time-dependent reliabilities of each constraint reach to their corresponding solutions shown in Table 9.

Convergence history of design parameters for example 6.3

Convergence history of unified time-dependent reliability solutions for example 6.3

Convergence history of objective performance for example 6.3

Curves of unified time-dependent reliabilities under the final design parameter solutions varying with time interval upper bound for example 6.3
6.4 A cantilever beam
A cantilever beam (Jiang et al. 2017; Shi et al. 2019) shown in Fig. 31 is introduced to show the effectiveness of the proposed SOUTRA for solving TRBDO with both probability and evidence input variables. The cantilever beam is anchored at the left and free at the right end, in which the free end is under the vertical and horizontal time-variant loads F1(t) and F2(t) respectively. The width w and thickness h of the cross-section of this cantilever beam are deterministic design parameters, and the optimization objective is minimizing the cross-sectional area of this beam. The probability constraints respectively mean the maximum stress is not allowed to be greater than yield stress y and the replacement of free end of the beam should be less than the allowable displacement D. y and D are assumed to be evidence variables according to the specialist’s experience. The BPA structure of the evidence variables is shown in Table 10. The considered input random variables are the length L and the Young’s modulus E of the cantilever beam, in which L and E are assumed to follow uniform distribution and Gumbel minimum extremum type I distribution respectively. The distribution parameters of the input random variables and stochastic processes are shown in Table 11. The optimization model of this cantilever beam is shown as follows:

The cantilever beam
The considered time duration is t ∈ [0, 10]year.
In this example, the initial design parameters are set to be [w(0), h(0)] = [4, 4]; the optimization solutions obtained by the proposed SOURA and DNOM are shown in Table 12. It can be seen from Table 12 that the design parameters estimated by the proposed SOUTRA can match well with those of the DNOM, which illustrates the accuracy of the SOUTRA. At the same time, there are two evidence variables with 8 and 5 focal elements respectively. The number of joint focal element is 8 × 5 = 40, and 2 × 40 = 80 times of time-dependent reliability analysis are required in each iteration for both SOUTRA and DNOM. Therefore, the total numbers of time-dependent reliability analysis are 7 × 80 = 560 and 22 × 80 = 1760 for the proposed SOURA and DNOM respectively. The total computational costs of the proposed SOUTRA are about one-third of those of the DNOM, which illustrates the high efficiency of the proposed SOUTRA.
Figures 32, 33, and 34 show the convergence histories of the design parameters, unified time-dependent reliability solutions, and objective performance respectively. These figures illustrate the good convergence characteristic of the proposed SOUTRA. Moreover, under the final design parameter solutions, unified time-dependent reliabilities varying with time interval upper bound are shown in Fig. 35. Figure 35 shows that as the increase of the time interval upper bound, the unified time-dependent reliabilities of each constraint are decreasing, which is consistent with the deterioration of time-dependent structure. At the final time interval upper bound, i.e., te = 10, the unified time-dependent reliabilities of each constraint reach to their corresponding solutions shown in Table 12.

Convergence history of design parameters for example 6.4

Convergence history of unified time-dependent reliability solutions for example 6.4

Convergence history of objective performance for example 6.4

Curves of unified time-dependent reliabilities under the final design parameter solutions varying with time interval upper bound for example 6.4
7 Conclusions
An efficient decoupling method named SOUTRA is proposed to solve the TRBDO with aleatory and epistemic input uncertainties, in which the aleatory uncertainty is described by probability variables, and epistemic uncertainty is considered by evidence variables. The proposed SOUTRA converts the original nested optimization process into a sequence of unified time-dependent reliability analysis, updated reliability index target estimation, and deterministic optimization to reduce the computational cost. The updated reliability index target is calculated by using the combination of current time-dependent reliability solution, time-independent reliability solution, and original reliability index target in each iteration. Furthermore, the time-independent reliability solution corresponds to a constructed time-independent RBDO at the initial time instant by treating the evidence variable as random one. Considering the issues that may encounter in the uniformity approach and equal areas method, a new approach named FEM is established to convert the evidence variable into random one.
It is worth to note that the improvement of efficiency is mainly due to the decoupling strategy, and the FEM guarantees algorithm stability of the whole proposed SOUTRA. Since the number of unified time-dependent reliability analysis during the optimization process affects the total computational cost seriously, the proposed decoupling strategy can decrease the number of unified time-dependent reliability analysis by solving the original nested optimization with a sequential optimization process. Several examples involving numerical and engineering examples are tested by the proposed SOUTRA, and the solutions illustrate that the proposed SOUTRA is an accurate and efficient method for solving the TRBDO with both probability and evidence input variables.
Abbreviations
- RBDO:
-
Reliability-based design optimization
- TRBDO:
-
Time-dependent reliability-based design optimization
- SOUTRA:
-
Sequential optimization and unified time-dependent reliability analysis
- FEM:
-
Focal element midpoint
- SORA:
-
Sequential optimization and reliability assessment
- SLA:
-
Single-loop approach
- KKT:
-
Karush-Kuhn-Tucker
- MPTP:
-
Minimum performance target point
- AMV:
-
Advanced mean value
- AAMV:
-
Adjusted advanced mean value
- MMV:
-
Modified mean value
- HDMV:
-
Hybrid descent mean value
- TIEM:
-
Time-invariant equivalent method
- T-SORA:
-
Time-dependent sequential optimization and reliability assessment
- T-SLA:
-
Time-dependent single-loop approach
- FARM:
-
First-order approximate reliability analysis method
- DNOM:
-
Double nested optimization method
- FD:
-
Frame of discernment
- BPA:
-
Basic probability assignment
- PDF:
-
Probability density function
- Bel:
-
Belief measure
- Pl:
-
Plausibility measure
- iTRPD:
-
Improved time-variant reliability analysis–based stochastic process discretization
- SOUTRA_UA:
-
SOUTRA combined with uniformity approach
- SOUTRA_EAM:
-
SOUTRA combined with equal areas method
- α = {α1, α2}:
-
FD with two mutually exclusive basic elements
- Ω(α):
-
Power set of FD
- ∅:
-
Empty set
- m :
-
BPA
- A:
-
Focal element
- m(A):
-
BPA of focal element A
- B:
-
Proposition
- S:
-
Safety region
- W :
-
Evidence input vector
- \( \tilde{\mathbf{W}} \) :
-
Transformed random variable vector of W
- W j :
-
jth evidence variable
- \( {\tilde{W}}_j \) :
-
Transformed random variable of Wj
- X :
-
Random design vector
- P :
-
Random parameter vector
- Z = [X, P]:
-
Random input variable vector
- Y(t):
-
Stochastic process vector
- d :
-
Deterministic design parameter vector
- n W :
-
Size of the evidence input variables
- \( {n}_{W_j} \) :
-
Number of focal element of Wj
- n X :
-
Size of the random design vector
- n P :
-
Size of the random parameter vector
- n z :
-
Size of the random input variable vector
- n Y :
-
Size of the stochastic process vector
- n d :
-
Size of the deterministic design parameter vector
- Ω(Wj):
-
Power set of FD of Wj
- Ω(W):
-
Joint possible set
- \( {\mathrm{A}}_j^{i_j} \) :
-
ijth focal element in Ω(Wj)
- Al :
-
lth focal elements of Ω(W)
- \( {\mathrm{A}}_j^{i_jL},{\mathrm{A}}_j^{i_jU} \) :
-
Lower bound and upper bound of \( {\mathrm{A}}_j^{i_j} \)
- \( {\mathrm{A}}_j^{i_jS} \) :
-
Dispersion of the focal element \( {\mathrm{A}}_j^{i_j} \)
- \( {\mathrm{A}}_j^{i_jM} \) :
-
Midpoint of the focal element \( {\mathrm{A}}_j^{i_j} \)
- \( {m}_j\left({\mathrm{A}}_j^{i_j}\right) \) :
-
BPA of \( {\mathrm{A}}_j^{i_j} \)
- m(Al):
-
BPA of Al
- n JFM :
-
Number of joint focal element in Ω(W)
- t ∈ [t0, te]:
-
Time parameter
- g(Z, Y(t), W, t):
-
Performance function
- gi(d, Z, Y(t), W, t):
-
ith probabilistic constraint
- Gi(·):
-
ith constraint in standard normal space
- R:
-
Time-dependent reliability
- Bel(B):
-
Belief measure of B
- Bel(S):
-
Unified time-dependent Bel
- \( {\mathrm{Bel}}^{g_i}\left(\mathrm{S}\right) \) :
-
Unified time-dependent Bel of ith constraint
- Bell(S):
-
Sub-belief corresponds to focal element Al
- Belil(S):
-
Sub-belief corresponds to focal element Al and ith constraint
- Pl(B):
-
Plausibility measure of B
- Pl(S):
-
Unified time-dependent Pl
- Pll(S):
-
Sub-plausibility corresponds to focal element Al
- f(d, μX):
-
Objective function
- \( {f}_{\mathrm{min}}^{(0)}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right) \) :
-
Initial value of objective function
- \( {f}_{\mathrm{min}}^{(k)}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right) \) :
-
Objective value in kth iteration
- \( {f}_{\mathrm{min}}^{final}\left(\mathbf{d},{\boldsymbol{\upmu}}_{\mathbf{X}}\right) \) :
-
Finial optimum of objective function
- \( {f}_{{\tilde{W}}_j}^{UA}\left({\tilde{w}}_j\right) \) :
-
PDF based on uniformity approach
- \( {f}_{{\tilde{W}}_j}^{EAM}\left({\tilde{w}}_j\right) \) :
-
PDF based on equal areas method
- \( {f}_{{\tilde{W}}_j}^{FEM}\left({\tilde{w}}_j\right) \) :
-
PDF based on focal element midpoint
- \( {\delta}_j\left({\tilde{w}}_j\right) \) :
-
Indicator function
- Φ(·):
-
Standard normal cumulative distribution function
- Φ−1(·):
-
Inverse function of Φ(·)
- \( {\mathrm{R}}_i^{tar} \) :
-
Reliability target of ith probabilistic constraint
- \( {\beta}_i^{tar} \) :
-
Equivalent reliability index target
- \( {\beta}_i^{tar(k)} \) :
-
Updated reliability index target in kth iteration
- βi(t0):
-
Reliability index of ith constraint function at t0
- \( {\beta}_i^{(k)}\left({t}_0\right) \) :
-
Reliability index of ith constraint function at t0 in kth iteration
- β iUT :
-
Equivalent unified time-dependent reliability index
- βilmin(t∗):
-
Minimum instantaneous reliability index at t∗
- dL, dU :
-
Lower bound and upper bound of d
- μ X :
-
Mean vector of X
- \( {\boldsymbol{\upmu}}_X^L,{\boldsymbol{\upmu}}_X^U \) :
-
Lower bound and upper bound of μX
- μ P :
-
Mean vector of P
- \( {\boldsymbol{\upmu}}_{\mathbf{Y}\left({t}_0\right)} \) :
-
Mean vector of Y(t0)
- \( {\boldsymbol{\upmu}}_{\tilde{\mathbf{W}}} \) :
-
Mean vector of \( \tilde{\mathbf{W}} \)
- d (0) :
-
Initial value of d
- d (k) :
-
Estimated d in kth iteration
- d final :
-
Finial optimum of d
- \( {\boldsymbol{\upmu}}_{\mathbf{S}}^{(0)} \) :
-
Initial value of μS
- \( {\boldsymbol{\upmu}}_{\mathbf{S}}^{\left(k-1\right)} \) :
-
Mean vector of inputs in (k − 1)th iteration
- \( {\boldsymbol{\upmu}}_{\mathbf{X}}^{(k)} \) :
-
Estimated μX in kth iteration
- \( {\boldsymbol{\upmu}}_{\mathbf{X}}^{final} \) :
-
Finial optimum of μX
- \( {\mathbf{u}}_{i\mathrm{MPTP}}^{(0)} \) :
-
Initial value of MPTP
- \( {\mathbf{u}}_{i\mathrm{MPTP}}^{\left(k-1\right)} \) :
-
MPTP in standard normal space
- \( {\mathbf{s}}_{i\mathrm{MPTP}}^{\left(k-1\right)} \) :
-
MPTP in original probability space
- \( \mathbf{U}={\left\{{\mathbf{U}}_{\mathbf{X}},{\mathbf{U}}_{\mathbf{P}},{\mathbf{U}}_{\mathbf{Y}\left({t}_0\right)},{\mathbf{U}}_{\tilde{\mathbf{W}}}\right\}}^{\mathrm{T}} \) :
-
Standard normal random variable vector
- \( \mathbf{u}={\left\{{\mathbf{u}}_{\mathbf{X}},{\mathbf{u}}_{\mathbf{P}},{\mathbf{u}}_{\mathbf{Y}\left({t}_0\right)},{\mathbf{u}}_{\tilde{\mathbf{W}}}\right\}}^{\mathrm{T}} \) :
-
Realization of standard normal random vector
- \( {\boldsymbol{\upmu}}_{\mathbf{S}}={\left\{{\boldsymbol{\upmu}}_{\mathbf{X}},{\boldsymbol{\upmu}}_{\mathbf{P}},{\boldsymbol{\upmu}}_{\mathbf{Y}\left({t}_0\right)},{\boldsymbol{\upmu}}_{\tilde{\mathbf{W}}}\right\}}^{\mathrm{T}} \) :
-
Mean vector of inputs
- \( {\mathbf{M}}_i^{(k)} \) :
-
Shifting vector of kth iteration
- \( {\varepsilon}_0^f \) :
-
Relative error threshold value
- \( {\varepsilon}_f^{(k)} \) :
-
Relative error in kth iteration
- Δ:
-
Ordinate of first support point
References
Bae HR, Grandhi RV, Canfield RA (2004) An approximation approach for uncertainty quantification using evidence theory. Reliab Eng Syst Saf 86(3):215–225
Choi SH, Lee G, Lee I (2018) Adaptive single-loop reliability-based design optimization and post optimization using constraint boundary sampling. J Mech Sci Technol 32(7):3249–3262
Cid C, Baldomir A, Hernandez S (2019) A fast convergence approximate RBDO method considering both random and evidence variables. AIAA Scitech 2019 Forum 2219:1–18
Dempster AP (2008) Upper and lower probabilities induced by a multivalued mapping. Classic works of the Dempster-Shafer theory of belief functions. Springer, Berlin, pp 57–72
Du XP (2006) Uncertainty analysis with probability and evidence theories. ASME 2006 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers Digital Collection, 1025–1038
Du XP (2008) Unified uncertainty analysis by the first order reliability method. ASME J Mech Des 130(9):091401.01–091401.10
Du XP, Chen W (2004) Sequential optimization and reliability assessment method for efficient probabilistic design. ASME J Mech Des 126:225–233
Du XP, Sudjianto A, Huang BQ (2005) Reliability-based design with the mixture of random and interval variables. ASME J Mech Des 127:1068–1076
Fang T, Jiang C, Li Y, Huang ZL, Wei XP, Han X (2018) Time-variant reliability-based design optimization using equivalent most probable point. IEEE Trans Reliab 99:1–12
Hawchar L, Soueidy CPEI, Schoefs F (2018) Global Kriging surrogate modeling for general time-variant reliability-based design optimization problems. Struct Multidiscip Optim 58:955–968
Hu Z, Du XP (2015) Reliability-based design optimization under stationary stochastic process loads. Eng Optim 48(8):1296–1312
Huang ZL, Jiang C, Zhou YS, Luo Z, Zhang Z (2016) An incremental shifting vector approach for reliability-based design optimization. Struct Multidiscip Optim 53:523–543
Huang ZL, Jiang C, Zhang Z, Fang T, Han X (2017) A decoupling approach for evidence-theory-based reliability design optimization. Struct Multidiscip Optim 56:647–661
Jiang C, Zhang Z, Han X, Liu J (2013) A novel evidence-theory-based reliability analysis method for structures with epistemic uncertainty. Comput Struct 129:1–12
Jiang C, Fang T, Wang ZX, Wei XP, Huang ZL (2017) A general solution framework for time-variant reliability based design optimization. Comput Methods Appl Mech Eng 323:330–352
Jiang C, Wei XP, Wu B, Huang ZL (2018) An improved TRPD method for time-variant reliability analysis. Struct Multidiscip Optim 58(5):1935–1946
Keshtegar B (2016) A modified mean value of performance measure approach for reliability-based design optimization. Arab J Sci Eng 54(6):1–9
Keshtegar B, Hao P (2016) A hybrid loop approach using the sufficient descent condition for accurate, robust, and efficient reliability-based design optimization. ASME J Mech Des 138:121401.1–121401.11
Keshtegar B, Hao P (2018) A hybrid descent mean value for accurate and efficient performance measure approach of reliability-based design optimization. Comput Methods Appl Mech Eng 336:237–259
Liang JH, Mourelatos ZP, Tu J (2004) A single-loop method for reliability-based design optimization. ASME Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 419–430
Meng Z, Li G (2016) Reliability-based design optimization combining the reliability index approach and performance measure approach. J Comput Theor Nanosci 13(5):3024–3035
Mourelatos ZP, Zhou J (2006) A design optimization method using evidence theory. ASME J Mech Des 128(4):901–908
Oberkampf WL, Deland SM, Rutherford BM (2002) Error and uncertainty in modeling and simulation. Reliab Eng Syst Saf 75(3):333–357
Sentz K, Ferson S (2002) Combination of evidence in Dempster-Shafer theory. Sandia National Laboratories, Albuquerque
Shafer G (1976) A mathematical theory of evidence. Princeton University Press, Princeton
Shi Y, Lu ZZ (2020) Novel fuzzy possibilistic safety degree measure model. Struct Multidiscip Optim 61:437–456
Shi Y, Lu ZZ, Zhou YC (2018) Global sensitivity analysis for fuzzy inputs based on the decomposition of fuzzy output entropy. Eng Optim 50(6):1078–1096
Shi Y, Lu ZZ, Xu XY, Zhou YC (2019) Novel decoupling method for time-dependent reliability-based design optimization. Struct Multidiscip Optim:1–18
Shi Y, Lu ZZ, Huang ZL, Xu LY, He RY (2020a) Advanced solution strategies for time-dependent reliability based design optimization. Comput Methods Appl Mech Eng 364:112916
Shi Y, Lu ZZ, Huang ZL (2020b) Time-dependent reliability-based design optimization with probabilistic and interval uncertainties. Appl Math Model 80:268–289
Wang C, Matthies HG (2018) Evidence theory-based reliability optimization design using polynomial chaos expansion. Comput Methods Appl Mech Eng 341:640–657
Wang C, Qiu ZP, Xu MH, Li YL (2017) Novel reliability-based optimization method for thermal structure with hybrid random, interval and fuzzy parameters. Appl Math Model 47:573–586
Wu YT, Millwater HR, Cruse TA (1990) Advanced probabilistic structural analysis method for implicit performance functions. AIAA J 28:1663–1669
Xia B, Lu H, Yu D, Jiang C (2015) Reliability-based design optimization of structural systems under hybrid probabilistic and interval model. Comput Struct 160:126–134
Xiao M, Gao L, Xiong HH, Luo Z (2015) An efficient method for reliability analysis under epistemic uncertainty based on evidence theory and support vector regression. J Eng Des 26(10–12):340–364
Yang X, Liu Y, Zhang Y, Yue ZF (2015) Probability and convex set hybrid reliability analysis based on active learning Kriging model. Appl Math Model 39(14):3954–3971
Yang F, Liu M, Li L, Ren H, Wu JB (2019) Evidence-based multidisciplinary design optimization with the active global Kriging model. Complexity:1–13
Yao W, Chen XQ, Huang YY (2013) Sequential optimization and mixed uncertainty analysis method for reliability-based optimization. AIAA J 51(9):2266–2277
Yu S, Wang ZL (2019) A general decoupling approach for time- and space-variant system reliability-based design optimization. Comput Methods Appl Mech Eng 357:112608
Zadeh LA (1965) Fuzzy sets. Inf Control 8(3):338–353
Zadeh LA (1999) Fuzzy sets as basis for a theory of possibility. Fuzzy Sets Syst 100(1):9–34
Zhang DQ, Han X (2020) Kinematic reliability analysis of robotic manipulator. J Mech Des 142(4):044502
Zhang X, Huang HZ (2010) Sequential optimization and reliability assessment for multidisciplinary design optimization under aleatory and epistemic uncertainties. Struct Multidiscip Optim 40(1):165–175
Zhang Z, Jiang C, Wang GG, Han X (2015) First and second order approximate reliability analysis methods using evidence theory. Reliab Eng Syst Saf 137:40–49
Zhang JH, Xiao M, Gao L, Qiu HB, Yang Z (2018) An improved two-stage framework of evidence-based design optimization. Struct Multidiscip Optim 58:1673–1693
Zhang H, Wang H, Wang Y (2019) Incremental shifting vector and mixed uncertainty analysis method for reliability-based design optimization. Struct Multidiscip Optim 59(6):2093–2109
Funding
This work was supported by the National Major Science and Technology Projects of China (Grant 2017-IV-0009-0046), the Innovation Foundation for Doctor Dissertation of Northwestern Polytechnical University (Grant CX201931), and the China Scholarship Council (No. 201906290125).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Replication of results
To further understand the proposed method for TRBDO with probability and evidence variables and replicate the solutions presented in this paper, the MATLAB codes of the proposed SOUTRA for the numerical example are provided as the supplementary material. Overall concepts and algorithms can be validated and extended through the numerical example.
Additional information
Responsible Editor: Yoojeong Noh
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Highlights
• A new method named SOUTRA is proposed to solve TRBDO with mixed uncertainties.
• A new probability transformation method called FEM is established.
• Original nested optimization is solved by a sequence of optimization process.
• Only few numbers of unified time-dependent reliability analysis are required.
Electronic supplementary material
ESM 1
(RAR 10 kb)
Rights and permissions
About this article

Cite this article
Shi, Y., Lu, Z., Zhou, J. et al. Time-dependent reliability-based design optimization considering aleatory and epistemic uncertainties. Struct Multidisc Optim 62, 2297–2321 (2020). https://doi.org/10.1007/s00158-020-02691-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-020-02691-4