
Abstract
Measurements collected by Leosphere Doppler lidars were reviewed to study meteorological processes such as wind shear, wind profiles, gust fronts, and wake vortices over airports. First, the basic concepts of lidar are discussed, then its use for wind environments with respect to high-impact weather events is presented. Issues related to previous definitions of wind-related algorithms and criteria are summarized to validate the use of Doppler lidar for clear-air environmental conditions. Based on International Civil Aviation Organization (ICAO) criteria that use a 500-m height threshold in the vertical for wind warning conditions, this work suggests that use of Doppler lidars can significantly improve the safety of flight environments along landing and takeoff corridors at airports by providing warnings to pilots and ground crew and optimizing air-traffic management. The wind measurements from the lidars are found to be accurate to 0.1 m s−1, and use of Doppler lidars can increase the probability of detection of wind-related severe weather conditions by up to 50% beyond the 500 m of the atmospheric boundary layer (ABL).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Doppler light detection and ranging (lidar) systems are becoming extensively used for measuring wind parameters, aerosol data, and cloud layers over airports and at high levels. They can cover large horizontal and vertical areas depending on weather conditions compared with ground-based in situ observations. For this reason, they may be more applicable for aviation operations. Using measurements of Doppler velocities (Vd) and backscatter fields (β), lidars can be used to obtain high-impact weather variables such as vertical air velocity, gust, low-level wind shear, clear-air turbulence (CAT), and wake vortices (Winckelmans et al. 2005; Frech and Holzäpfel 2008; Gerz et al. 2005). These parameters are very important for aviation operations (Gultepe et al. 2019; Luce et al. 2010).
Following the introduction of solid-state yttrium aluminum garnet (YAG) lasers in the 1980s, the first coherent Doppler lidars (CDLs) were developed. At the end of the 1990s, Coherent Technologies Inc. (CTI) developed the first commercialized lidar, based on emission wavelengths of 2 μm and 1.6 μm (Frehlich et al. 1997; Krishnamurthy et al. 2012). This lidar is presently commercialized by the company Lockheed Martin Coherent Technologies Inc. In the late 1990s, due to the rapid development of optical-fiber telecommunications technology, optoelectronic components including laser transmitters, optical amplifiers, and fast detectors operating at 1.5 μm started to be used because of the lower attenuation in optical fibers. These technologies, including CDL sensors with optical fiber amplifiers, have then been developed by various research laboratories including QinetiQ (UK) and Office National d'Études et de Recherches Aérospatiales (ONERA, France) (Cariou et al. 2006; Dolfi-Bouteyre et al. 2007). A CDL with a 1.5-μm optical fiber was commercialized by Leosphere Company (France), Halophotonics Company (UK), and Zephir (UK), and 1800 CDLs are being used worldwide for observations related to wind energy and meteorological applications. Presently, roughly 15 airports worldwide are equipped with Doppler lidars for measuring wind-related parameters (including low-level wind shear), aerosols, ash, or wake turbulence generated by aircraft.
A technological summary of lidars available for operations was performed by Steen et al. (2010), who provided information on the maturity, update rate, latency, coverage, range, accuracy, weather resilience, and cost of CDLs operating at wavelengths of 1.5, 1.6, and 2 μm based on regular and solid-state lasers. It is known that the costs of CDLs based on optical-fiber lasers are significantly lower than those using solid-state lasers.
Using CDL technologies, dry wind shear and wake vortices have been studied extensively at airports recently; For example, the European Union Single European Sky Air Traffic Management (ATM) (SESAR) research project (https://ec.europa.eu/transport/modes/air/sesar) was developed to modernize existing weather observing systems at airports that use CDLs (Mutuel et al. 2014; Juge and Barbaresco 2014; Barbaresco 2015). Current wind observation systems at airports have remained almost the same for over 40 years (International Civil Aviation Organization (ICAO) Annex 3, 2007a, b), as stated by the World Meteorological Organization (WMO; Kulesa 2003). Both the WMO and ICAO have suggested that automated weather observing systems (AWOS) with detail surface observations of wind and visibility should be used at airports. These systems are dedicated to data acquisition, processing, dissemination, and display in real time of meteorological parameters that affect landing and takeoff operations. The surface parameters include surface wind, visibility, runway visual range, height of cloud base, air and dew-point temperatures, and atmospheric pressure, all of which affect flight conditions at the surface (Gultepe et al. 2009).
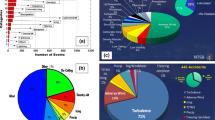
Early studies suggested that the majority of accidents occur during aircraft takeoff and landing, or near to airports. Many of these accidents are strongly related to winds, gust, wind shear, and turbulence conditions, and these usually represent major causes of aircraft accidents and delays at airports. A study performed in Europe (Eurocontrol 2013; Rooseleer and Treve 2015) showed that half of accidents according to the Aviation Safety Network (ANS) were the result of adverse weather conditions during the time period of 2010–2012. In terms of air-traffic control (ATC) delays and corresponding costs, Klein and Kavoussi (2009) and Kulesa (2003) stated that the impact of adverse weather on aviation operations accounted for 20 and 70% of delays in Europe and the USA, respectively. These adverse conditions include high-impact weather (HIW) conditions such as thunderstorms and convective weather, in-flight icing, and strong winds and turbulence, which were the reason for the majority of delays and extra costs associated with ATC.
The goal of this work is to provide information on the WindCube lidar technology used for aviation applications during several field projects developed by Leosphere. In this study, measurements and monitoring of wind-related parameters (e.g., gusts, eddies, wake vortices, and wind shear) are emphasized for aviation applications based on the three field projects described in Sect. 3. First, the WindCube lidar concept and corresponding equation are presented in Sect. 2. Then, project information, including sites and observations, are described in Sect. 3. The results and a discussion are then presented in Sects. 4 and 5, respectively, while future challenges related to application of lidar technology to aviation meteorology are given in Sect. 5. The conclusions of this work are finally presented in Sect. 6.
2 Doppler Lidar Concept
Lidar is an active remote-sensing tool used extensively for measuring atmospheric wind and turbulence, aerosol physical characteristics, and cloud profiles with optical thickness less than about 2–3 (Fuertes et al. 2014; Thobois et al. 2018). Lidar measurements have been extensively used for wind energy estimation, meteorological research or aviation weather, and aerosol research. A lidar system transmits a light signal that interacts with targets in the air, then the backscattered amount is received by the lidar receiver. The returned amount is corrected for attenuation/scattering conditions. Although they have some similarities with radars, their wavelength lies in the optical range from 0.350 to 10 μm. The power returned to a lidar is related to the particle surface area (D2) rather than the power of D6 for radar technology.
The choice of the emission wavelength (λ) depends on the application, being related to the atmospheric quantity to be measured, the availability of reliable and cost-effective laser sources, the optical atmospheric transmission, as well as eye safety issues. As shown in Fig. 1, the highest atmospheric transmission occurs in the visible range, where the maximum safe laser exposure is the lowest. To design an efficient lidar platform, λ should be selected to achieve the highest possible transmission while remaining eye-safe. In a lidar design, considering these aspects, the visible range should be avoided for automatic and operational applications. Generally, the ultraviolet (UV) spectral range below 0.4 μm and the near-infrared (near-IR) range (from 1.4 to 2.5 μm) are usually recommended for lidar designs.

(adapted from Thobois et al. 2017)
Atmospheric transmission and maximum laser exposure
The lidar equation for the WindCube lidar platform is first provided, then its use for obtaining meteorological parameters related to current field observations is discussed. The data availability is defined as the percentage of validated data for a given distance (ISO 28902-2 2017). In the data processing, a confidence index is derived from the signal-to-noise ratio definition and used to determine the data availability. The minimum detected power is limited by the photon noise. The power received by the lidar depends on the physical conditions and targeted weather physical parameters. The lidar equation is usually expressed as
where T is the global round-trip transmission, Pe is the emitted peak power, β is the atmospheric backscatter coefficient, C is the speed of light, τp is the pulse duration, Ar is the telescope effective area, Z is the distance from the lidar to the target, and F(Z) is the instrumental overlap function, which depends on the focused distance and beam size. As a CDL emits light in the near-IR spectrum, the received power results from Mie scattering by aerosols or particles whose size is at least one-third of the wavelength (0.5 μm for 1.5 μm).
The backscattering and transmittance properties of a lidar laser are related to the atmospheric gases, aerosols, and hydrometeors. Both the received power and data availability decrease with the target distance (Z), while the data availability also decreases with weather conditions. As expressed by Eq. (1), the received power is reduced when the visibility (Vis) decreases because of atmospheric extinction (Gultepe et al. 2009). Rain, drizzle, and heavy fog conditions can absorb most of the light, resulting in reduced lidar returns (Gultepe et al. 2006; Chan 2008). The expected range of a WindCube400S lidar through the atmosphere, in the absence of precipitating or liquid clouds, is greater than 10 km over 80% of the time. Such performance is obtained for Vis > 10 km. In case of moderate or heavy rain, lidar-based measurements can be completely lost for ranges > 2 km.
3 Field Projects and Measurements
3.1 Project Setup
Lidar observations collected during three field projects were used to monitor and detect wind shear, gust, wake vortices, and updrafts. WindCube lidars from Leosphere were used at the following project sites: (1) the Denmark Tech University (DTU) site at Hovsore, DK, (2) Paris-CDG International Airport in Paris, France, and (3) Lanzhou International Airport, China. The project sites are shown in Fig. 2. As an example, the scanning coherent Doppler lidar at the Denmark Technical University (DTU) site is shown in Fig. 2a. In this project, the accuracy and precision of the wind measurements of the WindCube200S lidar were evaluated against measurements from a reference meteorological tower; the details are given in Sect. 4. The accuracy and precision of the radial velocity were estimated to be 0.1 m s−1 and 0.2 m s−1, respectively.

The WindCube200S lidar at the a Denmark Tech University (DTU) site in Hovsore, DK, b Lanzhou International Airport, and c Paris-Charles de Gaulle International Airport
3.2 Measurement Principle
In lidar technology, a laser source emits pulses of light at pulse frequency of ωl. Moving particles in the targeted volume backscatter the light, which is assumed to follow Mie scattering theory. The frequency of the backscattered light is shifted by the Doppler effect (fd = 2Vrλ) of the moving particles in the volume. The Doppler shift (fd) is proportional to the radial speed of the particles (Vr), which is the projection of the wind vector along the line of sight of the laser. The backscattered signal is then mixed with a reference beam light in an interferometer, providing a heterodyne beat signal at the Doppler frequency fd from which the radial wind speed can be accurately derived. The measurement principle of coherent Doppler lidar is shown in Fig. 3.

The measurement at a range x corresponds to the backscattered radiation received at time t after the laser pulse has travelled from the lidar to the particles located at range x, then back to the lidar. The position of the range gate is proportional to the time of flight according to x = Ct/2, where C is the speed of light. Assuming a Gaussian profile, the angular resolution Δz can be estimated from the convolution of the laser pulse profile P(t) of duration τp with the time-equivalent range gate W(t) of length τm (Fig. 4).

Time and distance diagram of a pulsed lidar. See text for symbol explanations
Δz can be estimated from τp (Fig. 4) and τm using the formula
The optimized trade-off between the range resolution and velocity resolution is achieved when τm ~ τp. The range resolution remains constant along the line of sight. For most CDLs, the pulse setting can be adjusted according to requirements.
CDLs measure the radial wind component, i.e., the projection of the wind vector along the line of sight (LOS). To retrieve the three components of the wind vector, viz. u, v, w, several laser beams aimed in several independent directions can be combined based on the assumption of the homogeneity of the horizontal wind (Uh). Different wind reconstruction techniques, known as Doppler beam swinging (DBS) and velocity azimuth display (VAD), can then be used to estimate the three-dimensional (3D) wind components (Gultepe et al. 1990).
In DBS mode, a CDL might use, for example, five beams, including one vertical LOS and four tilted LOSs pointing at 0°, 90°, 180°, and 270° with azimuthal angle of 15°. CDLs equipped with a scanning head can measure winds at up to 10 km or more, depending on the weather conditions. Several scanning scenarios are usually chosen, such as a single LOS or an azimuthal scan method at constant elevation, known as a plan position indicator (PPI) scan. A zenithal scan performed at constant azimuth is called a range height indicator (RHI) scan and can be used to obtain a vertical cross-section of the atmosphere. When using WindCube lidars, these scan techniques are commonly used to monitor the dynamical conditions of interest in 3D ranges and to provide information on wind and turbulence development.
When using the VAD technique, the continuity equation, assuming zero vertical air velocity at the ground and that the horizontal wind is linear at a given scan level, can be used to calculate the horizontal wind components, then the vertical air velocity can be calculated based on divergences using the lidar Vd values at various levels (Srivastava et al. 1986; Gultepe et al. 1990). Because of the use of PPI scanning and the uncertainty of up to 0.2 m s−1 in Doppler wind magnitudes, the error in the vertical air velocity obtained using the VAD technique can be as high as 0.5 m s−1, thus it should be used with care when the atmosphere is dynamically stable and/or strong shear exists in the boundary layer. Under the assumption that the horizontal wind field at a given altitude is linear within the regions scanned by the lidar, the radial wind data can be fit using a sinusoidal curve as a function of azimuth for fixed elevations. Improvements of the VAD technique include the extended VAD (EVAD) (e.g., Srivastava et al. 1986; Matejka and Srivastava 1991), for extracting additional parameters such as the divergence and vertical wind fields.
4 Results
4.1 Accuracy of Wind Measurements
Use of lidar for wind measurements can be significantly hindered by severe weather conditions such as heavy fog, rain, snow, or convective conditions (Gultepe et al. 2007).
The coherent Doppler lidar characteristics and measurements have been evaluated over 10 years versus meteorological data obtained from masts. The meteorological parameters obtained from the lidar are sampled at 10-min intervals for averaged wind speed and direction. The lidar data were then evaluated at the reference test sites by independent institutions. Regression analysis was carried out between the calibrated cup anemometer and lidar data, and the results are shown in Fig. 5. The mean difference between the two platforms was estimated to be about 0.02 m s−1 by DNV-GL consulting company. The standard deviation (SD) wind speed was 0.13 m s−1. Based on all the data, the typical accuracy was better than 0.1 m s−1 at all heights. Example scanning coherent Doppler lidar data obtained during the project designed by Denmark Technical University (DTU) are shown in Fig. 6. The campaign setup is shown in Fig. 2. These results suggest that the accuracy and precision of the radial velocity were 0.1 m s−1 and 0.2 m s−1, respectively.

Regression analysis of measurements by a WindCube-v2 lidar short-range vertical profiler against calibrated cup anemometer measurements at altitude of 100 m (a) and 135 m (b)

Comparison of 10-min radial velocity from a WindCube200S lidar versus tower measurements projected on the line of sight (Wagner and Courtney 2014)
4.2 Causes of Low-Level Wind Shear
Wind shear is defined as a sudden and sustainable change of wind velocity and/or direction. Detection and forecast of this effect for airports are crucial for safe and efficient ATC. The general requirements for wind shear alerts are usually taken from ICAO Annex 3 (2005), but it does not provide detailed information or requirements for observation systems in terms of range, resolution, and wind shear. Setting these requirements at airport locations can be a difficult task as the wind shear changes continuously as a function of weather processes. Formation of low-level wind shear is strongly related to frontal systems, convection, microbursts, and thermal instabilities. The most dangerous wind shear occurs as a result of microbursts, because they exhibit the shortest temporal and spatial scales (< 15 min and < 10 km, respectively) with wind speed > 15 m s−1 (> 30 knots). Microbursts can significantly affect aircraft flight conditions during landing and taking off, and cannot be predicted accurately with numerical weather prediction (NWP) models because of their short-lived characteristics.
4.3 ICAO Requirements for Airport Wind Applications
The ICAO recommendations and practices for low-level wind shear detection are detailed in Refs. (2005, 2007a, b). These recommendations and best practices were mainly written based on the use of low-level windshear alert systems (LLWAS) (using a network of anemometers) and terminal Doppler weather radar (TDWR) systems (using Doppler radars), but not for lidars. In the 1960s, low-level windshear alert systems (LLWAS) were developed using anemometers with separation of 20 m around airports. These systems mainly cover runways, but not takeoff paths or approaches. Doppler radar sensors have been developed for use in different bands (C, S, X) to detect wind shears, although they only capture cloud and precipitation conditions.
The ICAO reports (2007a, b) provide two different requirements for aviation applications: (1) wind shear alerts and (2) warnings (Table 1). The ICAO (2007a, b) documents (Table 1) explain that, when wind shear is detected, wind shear alerts should be issued. However, the recommended coverage area for the wind shear (WS) alert is not provided. WS warnings are usually provided manually by meteorological officers based on various in situ observations and available forecasts. This deficiency can be covered by lidar observations. The current guidelines for wind shear observations based on ICAO-9817 (ICAO 2005) are presented in Table 2, suggesting that improvements in reporting of wind shear and gust conditions are required.
4.4 Experimental Results from Lanzhou International Airport
Lanzhou-Zhongchuan Airport (ICAO code ZLLL), Hong Kong, located in the North West region of China, was the site of WindCube lidar observations for detecting wind shear and gust detection. This site usually faces severe wind shear and gust conditions (Chan et al. 2006), with 15 cases of severe shear reported each year by pilots. The majority of wind events occur below altitude of 500 m when dry air conditions usually exist. These weather conditions do not allow efficient use of weather radars for WS detection. A project (Fig. 2) initiated by the Air Traffic Management Bureau (ATMB) of the Civil Aviation Administration of China (CAAC) was used to evaluate the capability of a Doppler lidar sensor to detect low-level wind shear conditions at ZLLL. The criteria for wind-related parameters were set at the beginning of the project based on the local wind shear characteristics, because accurate wind shear observations were not available. Therefore, the lidar settings and configuration were first applied to increase the quality of the data applicable for proper operational wind shear detection.
A WindCube400S-AT coherent Doppler lidar provided by Leosphere was installed near a runway at Lanzhou ZLLL Airport for about 9 months in 2016. The goal was to maximize the performance of wind shear detection in both directions, viz. lateral and along the flight direction. Its proximity to the runway ensures that the Doppler velocity (Vr) is very close to the headwind and tailwind components. The configuration consisted of a series of full azimuthal scans at the glide slope angle, repeated every 3 min and spaced by full azimuthal PPI scans at various elevation angles and by an RHI vertical scan. The general principle behind this configuration is to provide a 3D wind plan with the following features:
-
Wind shear alerts should be provided by PPI scans at 3° for landing and 6° for takeoff;
-
Vertical wind profiles should be provided by PPI scans at higher elevations (> 45°);
-
3D monitoring of wind shear events should be provided by a combination of PPI and RHI scans.
The capability of the WindCube400S-AT lidar to provide relevant wind shear alerts was assessed using the probability of detection (POD, defined as the fraction of observed events that were correctly forecast) and the false alarm rate (FAR, the fraction of positive forecasts that were wrong) of wind shear events. Two methodologies were applied. First, the good detection ratio (GDR) of dry-air wind shear was defined as the ratio of valid wind shear alerts obtained using the Rainbow5 software developed by SELEX weather-radar company. The alerts were considered acceptable for changes of the headwind or tailwind speed along the profiles of above 15 knots. This parameter allows characterization of the performance of the detection algorithm.
Secondly, pilot reports provided by end users were used to determine the POD of the lidar measurements. The results suggested that the POD of the lidar data reached 83.3% (Table 3). Three events reported by pilots were not detected by the lidar, being cases with low-level turbulence and strong crosswind conditions. Note that, even though the POD when using lidar to detect wind shear was high, this does not mean that the FAR must be low. Indeed, the FAR was at least about 20% but could increase to more than 50% with increasing precipitation, when the quality of lidar data quickly decreases. However, inclusion of lidar data into the analysis clearly made a good contribution to shear detection under clear environmental conditions.
4.5 Low-Level Dry Wind Shear Event
The WindCube400S CDL in PPI scan mode at an elevation angle of 3° was installed at ZLLL airport and tested during 31 May 2016. The wind direction was originally stable and from the south. The lidar provided a two-dimensional (2D) image of the radial wind speeds, as shown in Fig. 7, where positive radial wind speed (from yellow to red) is towards the lidar and negative radial wind speed (light to dark blues) is away from the lidar. The wind speed and direction on this day were highly variable; the wind direction changed from east below 200 m level to south above 200 m level. Eventually, the wind above 200 m turned to northwest during the morning. The northerly winds strengthened, resulting in cold air subsidence. These northerly and southerly winds at low altitudes led to a convergence zone that resulted in strong wind shear of 20 knots at ZLLL. An aircraft trying to land during this wind shear event was asked to modify its flight path due to strong tailwinds. Then, a pilot alert for wind shear was issued based on the lidar-detected wind shear conditions.

Temporal evolution of a dry wind shear event on 31 May 2016 as observed by the WindCube400S CDL installed at Lanzhou Airport in a PPI scan at elevation angle of 3°
4.6 Gust Front Detection
The gust line follows the change in wind flow rate. This change can be used to identify the line of physical separation and discontinuity in the wind flow direction. The gust front detection algorithm indicated the passage of a gust front based on lidar observations collected at ZLLL airport on 21 September 2016 by utilizing Rainbow5 software; the results are shown in Fig. 8 and described in Table 2. The results in Fig. 8 suggest that the location of the gust front and its time development were detectable.

Example of gust front detection performed by Rainbow5 software using WindCube400S CDL data at Lanzhou-Zhongchuan Airport, Hong Kong during a wind shear event on 21 September 2016
4.7 VAD Technique and Vertical Air Velocity
The velocity azimuth display profile (VADP) algorithm is commonly used to monitor the vertical profile of 2D wind components with the vertical air velocity (wa). Based on PPI scans, the mass continuity equation (Gultepe et al. 1990; Tian et al. 2015), assuming zero wa at the surface, can be used to obtain the divergence/convergence field as a function of height, which is then converted to wa. Figure 9 shows the results of the VADP algorithm applied to a wind shear event on 21 September 2016, revealing strong wind shear at the surface and 2.1 km levels.

Example vertical wind profiles produced by Rainbow5 software from WindCube400S CDL data during a wind shear event on 21 September 2016
4.8 Wake Vortex Monitoring
Wake turbulence is generated by each flying aircraft and represents a risk for following aircraft. This is why minimum separations between aircrafts to avoid wake turbulence have been established by the ICAO, as described in the ICAO-Procedures for Air Navigation Services (PANS) wake turbulence scheme (ICAO-PANS-ATM 2007a, b). These regulations were established over 40 years ago to prevent the risk of a following aircraft encountering wake vortices generated by the aircraft ahead. These minimum separations to avoid wake turbulence are classified into three criteria based on aircraft weight and wingspan and represent one of the most important factors limiting airport capacity. In the early 2000s, lidar played an important role in detecting, localizing, and determining the intensity of wake vortices, which were studied during EU-supported projects (Speijker 2009; Sawyers 2010; Leweke 2005). Thanks to the in-depth understanding of wake turbulence behavior and decay, these studies revealed that the existing ICAO separation minima were overly conservative and should be optimized. The current ICAO regulations have been improved through a joint US–EU project called RECAT-WT (Re-Categorization of Wake Turbulence, 2014, available at http://www.recat-project.eu). In this project, the medium and heavy categories were subdivided into lower and upper groups. The European Aviation Safety Agency (EASA) accepted this new classification and implemented it at airports in Europe. Rather than the concept of a static separation distance, a dynamic distance separation concept called time-based separation (TBS) was also developed. The main concept behind TBS is to adjust the separation distance as a function of weather conditions, more specifically the headwind profile along the glide slope. However, for general dynamic distance separation concepts, wind, crosswind, and eddy dissipation rate (EDR) measurements or calculations are needed, because these parameters can affect the decay and lifetime of wake vortices (Singhal 2014). Therefore, Doppler lidar measurements can provide detailed information for such TBS applications.
Using the WindCube Doppler lidar at Paris-Charles de Gaulle International Airport, a wake vortex algorithm using wake vortex data from 2015 to 2017 was applied for risk monitoring after implementation of the new RECAT-EU scheme for optimizing the separation distance minima (Eurocontrol 2013). Measurements of wake vortices at the airport were performed using a specific configuration based on RHI scans to refresh the wake vortex data every 8 s with vertical (horizontal) resolution of 2 (5) m (Fig. 10). Because the altitude of aircraft is usually low (< 80 m), the vertical scan was fixed at 24° to allow interpretation and monitoring of wake vortices very close to the ground. The vertical resolution of 2 m was achieved using an angular resolution of 0.19°, leading to an accumulation time per beam of 50 ms, while a range-gate overlapping technique was used to achieve the targeted range resolution of 5 m.

Scanning scenarios used by the WindCube200S lidar for collection of wake vortex data at Paris-Charles De Gaulle Airport
Overall, the results showed that approximately 25,000 wake vortex tracks were collected by the 200S lidar during the study period. Two-thirds of these tracks were found for medium-sized aircraft. Detailed analysis of the wake vortex data from the lidar was carried out based on the following three parameters:
-
1.
Hit rate, defined as the probability of detecting a pair of wake vortices at least in the first scan of a track
-
2.
Vortex span, defined as the initial distance between the two vortex cores (immediately after the merge of the marginal wake vortices) for one aircraft
-
3.
Initial circulation, defined as the maximum circulation of the vortices in a wake vortex track
The results were evaluated for heavy and jumbo aircrafts using lidar observations for Vis > 10 km with no rain. The hit rate for the wake vortex data based on all aircraft was found to be about 94%. The accuracy results for the heavy and jumbo aircraft categories are collated in Table 4, revealing reasonable performance for detection of wake vortex. Using an earlier lidar system based on a wake vortex characterization algorithm (Rooseleer and Treve 2015), Thobois et al. (2018) suggested that the difference between the new analysis results and results from old data was about 2%.
4.9 Wake Vortex Generated by a Heavy Aircraft
The RHI scans with high spatial resolution by the scanning coherent Doppler lidar with short pulses allow observation of the complex flows of both vortices plus the background wind conditions (Chan and Shao 2007). The time evolution of a pair of wake vortices generated by a jumbo aircraft on 20 November 2015 during low crosswinds is shown in Fig. 11. This sequence of scans was collected by the Doppler lidar from 6:42:21 AM up to 6:45:33 AM. The single and first pair of wake vortices was observed from 6:42:21 AM to 6:43:53 AM. A second pair of wake vortices was observed above the runway at 6:44:16 AM, separated horizontally from the lidar by 365 m. This case could be characteristic of wake vortex encounters, since the crosswind was very low (~ 1 m/s) and the turbulence was weak. The high resolution of 5 m horizontally and 2 m vertically of the WindCube lidar were used to visualize the wake vortices and the vertical structure of the crosswind.

Radial wind measurements provided by the WindCube lidar, showing the evolution of a pair of wake vortices generated by a Jumbo aircraft on 20 November 2016 at 18:40:58 (a), 18:41:17 (b), 18:41:35 (c), 18:41:54 (d), 18:42:13 (e), and 18:43:00 (f)
In Europe, the reference document for wake vortex regulations can be found in the RECAT-EU project (Rooseleer and Treve 2015), including an evaluation of the risk using various severity metrics.
5 Discussion
The concept of coherent Doppler lidar is based on the physics of light propagation. Atmospheric conditions such as precipitation, clouds, and fog can impact on the precision and accuracy of the obtained wind speed data. Unlike other remote-sensing technologies such as sodars, Doppler lidar can provide accurate wind components and derived turbulence parameters for both cloud-free conditions and in the presence of clouds with optical thickness < 2–3 (Gultepe and Heymsfield 2016). Therefore, detection of ice fog (composed of suspended ice crystals) is possible with Doppler lidar systems (Gultepe et al. 2014). The precision and accuracy of Doppler lidar results are ensured by calibration procedures applied by the manufacturer.
The results provided by the WindCube400S-AT lidar provide important insights to better characterize the local wind shear and wake vortices at airports, including typical duration, headwind changes, headwind to tailwind changes, crosswind components, and turbulence, as well as their impact on air-traffic delays. Forecasters can use the resulting wind shear alerts and wind data from the Doppler lidar to evaluate wind shear events, leading to an increase of ~ 25% in the forecasting scores for dry wind shear. This increase reached up to 50% when taking into account additional pilot reports related to crosswind and turbulence (Fig. 12).

Percentage of wind shear events estimated using various methods, including pilot reports (PIREPs), NWP forecasts, and the POD based on both NWP predictions and lidar monitoring data. Using observations from the WindCube400S-AT lidar located at Lanzhou Airport, improved monitoring of wind shear conditions is clearly seen
Dry wind shear affects airports worldwide, being severe for those located close to shorelines, valleys, or mountains. Dry wind shear forms in a very complex way and depends on local weather conditions and topography. Doppler lidars can help improve evaluation of aviation meteorology concepts such as vortex, shear, and turbulence (Wieringa 1980). The use of fiber-based technology allows the lidar configuration to be adjusted flexibly to monitor dry wind shear. This technology has demonstrated its ability to achieve short time scales for operational purposes. The easy deployment of fiber-based lidars allows better and effective operational weather and aviation forecasts.
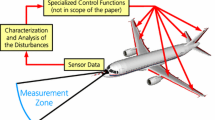
Lately, Doppler lidars have become commercially available instruments, such as those from Lockheed Martin Corporation, Leosphere, and Halo Photonics, opening their scope of application even to nonscientific end users, for example, to monitor flow around hills, and wind in the area of airstrips (Stawiarski et al. 2013; Tang et al. 2011a, b). Lidar can be a good tool for aviation operations for detecting wind-related parameters such as gust, wind shear, turbulence, and eddies, and clear-air turbulence, as well as particles which affect visible-light extinction. During flights, turbulence may be a major cause of high-level flight accidents. An ultraviolet lidar sensor developed by the German Aerospace Center (DLR) was tested during the Thales-led Delicat (Demonstration of LIdar based Clear Air Turbulence) program to reduce passenger and crew injuries by providing sufficient advance warning of an encounter (Vrancken et al. 2010). When installed onboard an aircraft, this new lidar system emits short-wave ultraviolet (UV) laser radiation along the direction of flight. The density of the air (and its fluctuations) can then be determined from the backscattered value measured for oxygen and nitrogen molecules in the air. These fluctuations provide information about clear-air turbulence ahead. Such advanced technology for aircraft protection against clear-air turbulence hazards requires validation by the aviation industry. Improving CAT monitoring in aircraft would increase both customer satisfaction and aviation safety. Based on traffic and accident statistics, use of UV lidar turbulence protection equipment could avoid 8–10 turbulence accidents per year and reduce by 15–20 (or 40%) the number of accidents due to turbulence per year when fully developed (http://www.delicat.inoe.ro/).
Using pulsed Doppler lidar systems, long-range high-resolution measurements of radial wind velocities are possible. With the development of commercial Doppler lidars and the reduction of their acquisition costs, dual-Doppler lidar systems will become increasingly accessible in coming years. Starwiarski et al. (2013) studied a highly synchronized long-range dual-Doppler lidar system, and extensively discussed the errors involved in this complex measurement technique. The sources of errors and interactions for this system relate to the retrieval algorithm, including errors from each single Doppler lidar and those occurring from the combination of instruments, such as relative beam angle, the temporal and spatial scales of the scan pattern, and atmospheric conditions. Certainly, deployment of two or even three Doppler lidars is necessary to measure two or three components of the wind vector in the atmospheric flow aloft. Details on the errors from a single and multiple lidars can be found in the work of Frehlich (2001), Frehlich et al. (1994, 1997, 1998), and Starwiarski et al. (2013).
6 Conclusions
Use of Doppler lidars in aviation weather applications is currently limited to about 10 pioneer projects being conducted worldwide, although some of these are using lidar data operationally (at airports in Japan, Hong Kong, and Italy). Their benefits for measuring wind shear, wind profiles, and turbulence and wake vortices are shown here using a state-of-the-art technology called Leosphere WindCube lidar.
The benefits of Doppler lidar to study the dynamics of weather systems are making them more popular for use in airport applications. Using Doppler lidar technology, three-dimensional wind components, covering various levels from the surface to higher levels, can also be obtained over and near airports, thereby improving flight dynamics. In addition to the Doppler velocity field, backscattered data obtained from the lidar return power have also recently been applied to calculate the cloud base, visibility, aerosol extinction, and volcanic ash hazards. This new capability allows the development of a multifunction meteorological observation system that could be integrated into supersites to improve nowcasting (Gultepe et al. 2019, current issue).
The most important result of this work is the suggestion that wind shear, turbulence, gust fronts, and wake vortices can be detected using Doppler lidars, and their time development can be studied in both horizontal and vertical directions. The uncertainty on the wind speed can be about 0.1 m s−1. It was also found that inclusion of Doppler lidars in nowcasting systems, as well as in integrated observing systems, could improve forecasts of aviation weather by up to 50% when no precipitation occurs. Clearly, previous ICAO criteria should be improved for future aviation meteorology applications.
The final step of the use of lidars in airport applications is the integration of lidar data into airport forecasting systems for optimizing air-traffic operations; this will allow airport authorities to reduce the occurrence of accidents due to wind- and turbulence-related weather events, mitigating atmospheric hazards.
References
Barbaresco, F. (2015). European FP7 UFO (Ultra-Fast wind sensors for wake-vortex hazards mitigation) Project: Technological Developments and Validation Campaign of New Generation Multifunction X-band and 1.5 μm LIDAR sensors on Airport for wind hazards monitoring on airport. WAKENET-EU Workshop, Bretigny, France, 13th and 14th May, 2014 (Oral Presentation).
Cariou, J. P., Augere, B., & Valla, M. (2006). Laser source requirements for coherent Lidars based on fiber technology. Comptes Rendus Physique, 7, 213–223.
Chan, P. W. (2008). Applications of an infrared Doppler lidar. Journal of Atmospheric and Oceanic Technology, 25, 637–655. https://doi.org/10.1175/2007jtecha1057.1.
Chan, P. W., & Shao, A. M. (2007). Depiction of complex airflow near Hong Kong International Airport using a Doppler LIDAR with a two-dimensional wind retrieval technique. Meteorologische Zeitschrift, 16, 491–504.
Chan, P.W., Shun, C. M., & Wu, K. C. (2006). Operational LIDAR-based system for automatic windshear alerting at the Hong Kong International Airport. 12th Conference on Aviation, Range, & Aerospace Meteorology, American Meteorological Society, Atlanta, GA, USA, 29 January—2 February 2006, Reprint 613.
Dolfi-Bouteyre, A., Valla, M., Augère, B., Cariou, J.P., Goular, D., Fleury, D., et al. (2007). 1.5 μm all fiber pulsed LIDAR for wake vortex monitoring. 14th Coherent Laser Radar Conference. pp. 27–31.
Eurocontrol. (2013). Performance review commission, performance review report. An assessment of air traffic management in Europe during the calendar year 2013, Final report, PRR 2013.
Frech, M., & Holzäpfel, F. (2008). Skill of an aircraft wake-vortex weather prediction and observation. Journal of Aircraft, 45, 461–470.
Frehlich, R. (2001). Estimation of velocity error for Doppler lidar measurements. Journal of Atmospheric and Oceanic Technology, 18, 1628–1639.
Frehlich, R., Hannon, S. M., & Henderson, S. (1994). Performance of a 2-mm coherent Doppler lidar for wind measurements. Journal of Atmospheric and Oceanic Technology, 11, 1517–1528.
Frehlich, R., Hannon, Stephen M., & Henderson, S. W. (1997). Coherent Doppler Lidar measurements of winds in the weak signal regime. Applied Optics, 36, 3491–3499.
Frehlich, R., Hannon, S. M., & Henderson, S. (1998). Coherent Doppler lidar measurements of wind field statistics. Boundary-Layer Meteorology, 86, 233–256.
Fuertes, F. C., Iungo, G. V., & Porté-Agel, F. (2014). 3D turbulence measurements using three synchronous wind lidars: Validation against sonic anemometry. Journal of Atmospheric and Oceanic Technology, 31, 1549–1556.
Gerz, T., Holzäpfel, F., Bryant, W., Köpp, F., Frech, M., Tafferner, A., et al. (2005). Research towards a wake-vortex advisory system for optimal aircraft spacing. Comptes Rendus Physique, 6(4/5), 501–523. (Special issue on Aircraft trailing vortices).
Gultepe, I., Sharman, R., Williams, P.D., Zhou, B., Ellrod, G., Minnis, P., Trier, S., Griffin, S., Yum, S.S., Gharabaghi, B., Feltz, W., Temini M., Pu, Z., Storer, L.N., Kneringer, P., Weston, M.J., Chuang, H.Y., Thobois, L., Dimri, A.P., Dietz, S.J., Gutenberg, Almeida, M.V., Neto, F.L. A. (2019). A review of high impact weather for aviation meteorology. Pure and Applied Geophysics January. (Accepted).
Gultepe, I., & Heymsfield, A. J. (2016). Ice fog, ice clouds, and remote sensing; Introduction. Pure and Applied Geophysics, 173(9), 2977–2982. https://doi.org/10.1007/s00024-016-1380-2.
Gultepe, I., Heymsfield, A. J., & Lenschow, D. H. (1990). A comparison of vertical velocity in cirrus obtained from aircraft and Lidar measurements. Journal of Atmospheric and Oceanic Technology, 7, 58–67.
Gultepe, I., Kuhn, T., Pavolonis, M., Calvert, C., Gurka, J., Isaac, G. A., et al. (2014). Ice fog in Arctic during FRAM-IF project: Aviation and nowcasting applications. Bulletin of the American Meteorological Society, 95, 211–226.
Gultepe, Müller, M. D., & Boybeyi, Z. (2006). A new warm fog parameterization scheme for numerical weather prediction models. Journal of Applied Meteorology, 45, 1469–1480.
Gultepe, I., Pearson, G., Milbrandt, J. A., Hansen, B., Platnick, S., Taylor, P., et al. (2009). The fog remote sensing and modeling (FRAM) field project. Bulletin of the American Meteorological Society, 90, 341–359.
Gultepe, I., Tardif, R., Michaelides, S. C., Cermak, J., Bott, A., Bendix, J., et al. (2007). Fog research: A review of past achievements and future perspectives. Journal of Pure and Applied Geophysics, 164, 1121–1159. (Special issue on fog, edited by I. Gultepe).
ICAO. (2005). Manual on low-level wind shear and turbulence first edition—2005. Doc 9817, AN/449. International Civil Aviation Organization (ICAO). DOC-09817-001-01-E-P.
ICAO-PANS-ATM. (2007a). ICAO Current distance separations ICAO minima are detailed and illustrated in PANS-ATM Doc 4444. Amendment No. 1 to the Procedures for Air Navigation Services (PANS), AIR TRAFFIC MANAGEMENT (ATM) (Doc 4444).
ICAO-PANS-ATM. (2007b). Annex 3 to the convention on international civil aviation, meteorological service for international air navigation—Part I: Core SARPs—Part II appendices and attachments (16th ed.). 8/07, E/P1/2000.
ISO 28902-2. (2017). Air quality—Environmental meteorology—Part 1: Ground-based remote sensing of wind by heterodyne pulsed Doppler Lidar. WMO ISO Standards.
Juge, P. & F. Barbaresco, 2014: Progress of European SESAR P12.2.2—Runway wake vortex detection, prediction and decision support tools—Project and presentation of 1 year Radar/LIDAR trials at Paris-CDG Airport planned in 2014–2015. WAKENET-EU workshop, Bretigny, France, 13th and 14th May, 2014 (Oral Presentation).
Klein, A., & Kavoussi, R. (2009). Weather forecast accuracy: Study of impact on airport capacity and estimation of avoidable costs. Eighth USA/Europe Air Traffic Management Research and Development Seminar (ATM2009), Fairfax, VA, USA.
Kongara, S., Calhoun, R., Choukulkar, A., & Boldi, M. (2012). Velocity retrieval for coherent Doppler lidar. International Journal of Remote Sensing, 33, 5306. https://doi.org/10.1080/01431161.2012.663524.
Krishnamurthy, R., Choukulkar, A., Calhoun, R., Fine, J., Oliver, A., & Barr, K. S. (2012). Coherent Doppler Lidar for wind farm characterization. Wind Energy. https://doi.org/10.1002/we.539.
Kulesa, G. (2003). Weather and aviation: How does weather affect the safety and operations of airports and aviation, and how does FAA work to manage weather-related effects? The potential impacts of climate change on transportation. DOT report. Conference: The Potential Impacts of Climate Change on Transportation, Washington, D.C., 2002-10-1 to 2002-10-2.
Leweke, T. (2005). FAR-wake; Fundamental research on aircraft wake phenomena. EU project Funded under: FP6-AEROSPACE Ref.: AST4-CT-2005-012238, Final Activity Report.
Luce, H., Nakamura, T., Yamamoto, M. K., Yamamoto, M., & Fukao, S. (2010). MU radar and lidar observations of clear-air turbulence underneath cirrus. Monthly Weather Review, 138, 438–452.
Matejka, T., & Srivastava, R. C. (1991). An improved version of the extended velocity-azimuth display analysis of single-Doppler radar data. Journal of Atmospheric and Oceanic Technology, 8, 453–466.
Mutuel, L. H., Barbaresco, F., Juge, P., Klein, M., Canal, D., Ricci, Y., et al. (2014). ATM decision support tool for wake vortex hazard management combining sensors and modeling. AIAA Paper n°2014-2332. AIAA Aviation, 6th AIAA Atmospheric and Space Environments Conference, 16–20 June, 2014, Atlanta, Georgia, USA AIAA 2014-2332, pp. 364–378.
Rooseleer F., & Treve V. (2015). RECAT-EU European Wake Turbulence Categorization and Separation Minima on Approach and Departure, EUROCONTROL technical report, 15/07/2015.V 1.1 available from EUROCONTROL Headquarters, 96 Rue de la Fusée B-1130 Brussels.
Sawyers, D. (2010). AWIATOR (aircraft wing with advanced technology operation) passive flow control on civil aircraft flaps using sub-boundary layer vortex generators. G4RD-CT-2002-00836, Funded under: FP5-GROWTH.
Singhal. J. (2014). From SESAR to implementation: Completing the TBS picture. 2014 Workshop of WakeNetEu network, 13–14 May 2014, Bretigny, France, (Oral Presentation).
Speijker, L. (2009). Crosswind-reduced separations for departure operations (CREDOS) WP4-final report. EU Project Program: FP6-AEROSPACE, Ref.: 30837.
Srivastava, R. C., Matejka, T. J., & Lorello, T. J. (1986). Doppler radar study of the trailing anvil region associated with a squall line. Journal of Atmospheric Science, 43, 356–377.
Stawiarski, C., Träumner, K., Knigge. C., Calhoun. R. (2013). Scopes and challenges of dual-Doppler lidar wind measurements—an error analysis. Journal of Atmospheric and Oceanic Technology, 30(9), 2044–2061.
Steen, M., Schonhals, S., Polvinen, J., Drake, P., Cariou, J. P., Bouteyre, A. D. et al. (2010). Candidate technologies survey of airport wind & wake-vortex monitoring sensors. Sensors for weather & wake-vortex hazards mitigation. 9th Innovative Research Workshop & Exhibition, December 7–9, 2010.
Tang, W., Chan, P. W., & Haller, G. (2011a). Lagrangian coherent structure analysis of terminal winds detected by lidar. Part I: Turbulence structures. Journal of Applied Meteorology and Climatology, 50, 325–338.
Tang, W., Chan, P. W., & Haller, G. (2011b). Lagrangian coherent structure analysis of terminal winds detected by lidar. Part II: Structure evolution and comparison with flight data. Journal of Applied Meteorology and Climatology, 50, 2167–2183.
Thobois, L., Cariou, J.-P. (2017). Next generation scanning LIDAR systems for optimizing wake turbulence separation minima[J]. Journal of Radars, 6(6), 689-698.
Thobois, L., Cariou, J.-P., Cappellazzo, V., Musson, C., & Treve, V. (2018). Comparison and validation of wake vortex characteristics collected at different airports by different scanning Lidar sensors. The European Physical Journal Conferences, 176(2), 06002. https://doi.org/10.1051/epjconf/201817606002. (ILRC 28).
Tian, L., Heymsfield, G. M., Didlake, A. C., Guimond, S., & Li, L. (2015). Velocity-azimuth display analysis of Doppler velocity for HIWRAP. Journal of Applied Meteorology and Climatology, 54, 1792–1808.
Vrancken, P., Wirth, M., Rempel, D., Ehret, G., Bouteyre, A. D., Lombard, L., et al. (2010). Clear air turbulence detection and characterization in the DELICAT airborne Lidar project. The 25th International Laser Radar Conference (ILRC25), in Saint Petersburg, Russia, on 06/07/2010. Presentation.
Wagner, R., Courtney, M. (2014). Scanning lidar verification study. DTU Report.
Wieringa, J. (1980). Representativeness of wind observations at airports, Royal Netherlands Meteorological Institute. Bulletin of the American Meteorological Society, 61, 962–971.
Winckelmans, G., Cocle, R., Dufresne, L., & Capart, R. (2005). Vortex methods and their application to trailing wake vortex simulations. Comptes Rendus Physique, 6(4/5), 467–486. (Special issue on Aircraft trailing vortices).
Acknowledgements
This work was mainly supported by Leosphere of France, and performed in collaboration with EUROCONTROL for the wake turbulence project at Paris-Charles de Gaulle Airport and with Norths West ATMB from Gansu, China for the wind shear project at Lanzhou Airport. This work is also partially supported through the Satellite Applications for Arctic Weather and SAR (Search and Rescue) Operations (SAAWSO) project by the SAR office of DND and ECCC of Canada.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Thobois, L., Cariou, J.P. & Gultepe, I. Review of Lidar-Based Applications for Aviation Weather. Pure Appl. Geophys. 176, 1959–1976 (2019). https://doi.org/10.1007/s00024-018-2058-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-018-2058-8