
Abstract
According to the configuration characteristics of axle counter cables in urban (suburban) railways and based on electromagnetic induction theory, the calculation of mutual inductance coefficient between traction current in rail and axle counter cable core is completed, and the simulation method of overcurrent in train traction transient process (e.g., circuit breaker switching) and the calculation method of induced voltage generated on axle counter cable core is proposed. Firstly, selecting a typical axle counter and its configuration, we analyze its working principle and interfered mechanism and confirm that the interference source is rail traction current, which forms induced burst voltage on axle counter cable through spatial magnetic coupling. Based on the MATLAB platform, the transient overcurrent waveform and value are simulated and verified. Further, according to the laying conditions and engineering parameters of the axle counter cable in the urban railway, the transient induced voltage generated by overcurrent on the axle counter cable core is simulated and calculated. Finally, referring to the interference case, the application and verification of the above method are completed. The conclusion shows that under certain conditions, the traction strong electric interference of the urban railway will exceed the signal voltage threshold of the axle counter, leading to the counting error of the axle number.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Urban railways are developing rapidly in China, the power frequency AC 25 kV traction mode is adopted, and the axle counter is used chiefly for train occupancy detection. With the continuous upgradation of train speed, density, and volume, more electromagnetic interference (EMI) problems appear. Especially in the depot, the train lifting pantograph and circuit breaker switching operation may lead to frequent overcurrent shocks, possibly interfering with the axle counter along the line and further affecting driving safety. A typical case is as follows: the axle counter of a particular line frequently appears with interference occupation when the train turns on/off the circuit breaker, causing the axle counter to display the occupation status incorrectly in the corresponding track section and affecting operation efficiency [1]. Therefore, this paper studies the disturbance of axle counters as the background and provides a theoretical basis for the development and application of axle counters in urban railways.
Considering the signal cable being interfered with by traction-strong electricity, Su et al. analyzed and calculated the longitudinal electromotive force (LEF) on the signal cable caused by the traction current [2]. Wang calculated the LEF generated by the electromagnetic induction of catenary on the signal cable at the highest driving density [3]. Charalambous studied the interference of signal cables in railway systems [4]. Zhang calculated the electromagnetic influence of strong wires on telecommunication lines [5]. In this respect, the authors have also carried out a comprehensive study. Considering the EMI of the traction power supply system (TPSS) and integrated grounding system (IGS), we proposed an improved calculation meth-od of LEF suitable for multi-conductor transmission line network of high-speed railway [6]; under the condition of autotransformer (AT) power supply of high-speed and heavy-haul railway, the difference between single and double-ended grounding of cable is analyzed [7]. For urban railways, Huang discussed the key issues, e.g., the TPSS selection, the joint construction scheme of traction substation and power substation, and the sharing mode of power supply resources with rail transit [8]. Liu et al. introduced the structure of the through power supply scheme of traction cable, modeled and solved the distance setting of the power supply arm under the conditions of through power supply, bilateral power supply, and unilateral power supply [9]. According to the axle counter working principle, Liao et al. analyzed the factors that would interfere with the axle counter and proposed solutions [10]. As a gradually popularized transportation mode, the laying and protection of axle counter cable under AC 25 kV traction power supply mode are still being determined, and the research on the interference of axle counter by the traction power supply is relatively blank.
To sum up, when strong current flows in rails, it will generate AC induced magnetic field, especially the transient surge current is significantly increased, easy to cause spatial coupling interference to adjacent weak current signal equipment (e.g., axle counter sensor) or weak current communication cables (e.g., axle counter cable) in parallel. Therefore, based on the urban railways, this paper focuses on the influence of traction strong electric interference on axle counter, conducts a series of research on mechanism analysis, modeling, simulation, and quantitative calculation in detail.
2 Axle Counter Principle and Interference Sources Analysis
2.1 Working Principle of Axle Counter
The axle counter consists of indoor and outdoor equipment, and the latter is an axle counter sensor; Indoor equipment mainly includes an amplifier board, axle counter board, reset board, and power board, as shown in Fig. 1.

Structure diagram of axle counter

Working principle of axle counter sensor
The position of the power board inputs 50 Hz AC 220V power and outputs DC 12 V and 24 V power, providing working power for other boards. When the wheel approaches the axle counter sensor, the ferromagnetic medium of the wheel has a damping effect on the internal components, causing the working state of the circuit to change, the terminal voltage at the output end of the circuit will rise, and axle counter sensor will generate the axle signal and output it to the amplifier board, who receives the axle signal of the axle counter sensor. After amplification and shaping, it forms the axle pulse, which provides working conditions for the axle counter board and the output board [11].
The axle counter sensor consists of two independent sensing units, SI and SII. When the wheel passes through the axle counter sensor, the two sets of sensing unit circuits respectively sense the wheel axle signals, and the two axle signals need to overlap in time. In Fig. 2, A and B are the intersections of the signals sensed by the two sensing units and the occupancy threshold SL, and the system identifies the running direction of the wheel through the phase relationship of the two signals. When the output signals of the axle counter sensors at the beginning and the end of a section are consistent, it is judged that the section is in an idle state; When the output signals of the axle counter sensors at the beginning and end of the section are inconsistent, it shows that the axle counter is disturbed, which leads to its misjudgment of the number of axles.
2.2 Interference Source Analysis
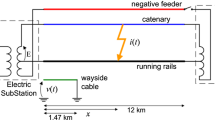
Overcurrent is generated during the transient traction process of the train. The current flowing through the rail will cause an induced voltage at the core of the axle counter cable through inductive coupling so that the signal transmitted to the amplifier board through the axle counter cable is higher than the voltage index of the occupied state of the amplifier board, resulting in misjudgment of the number of axles by the axle counter. The electromagnetic environment for the axle counter is shown in Fig. 3. It illustrates that when the pantograph of the train moves, switching the circuit breaker will generate overcurrent [12], the spatial magnetic field generated by the overcurrent flowing from the top of the train to the wheels is perpendicular to the direction of the spatial magnetic field of the axle counter sensor. Still, its spatial magnetic field intensity is brutal to reach the amount of interference to the axle counter sensor [13]. Since the spatial magnetic field generated by rail overcurrent is parallel to the magnetic field direction of the axle counter sensor, it is difficult to interfere with the axle counter sensor. Therefore, it is evident that the sensitive equipment of the axle counter is interfered with by the strong traction electricity of the urban railway axle counter cable.

Schematic diagram of electromagnetic environment of axle counter

Equivalent circuit of operating circuit breaker
The pantograph instantly contacts the catenary during the pantograph-lifting process of the train. Its equivalent circuit is shown in Fig. 4. When the circuit breaker is closed, the energy stored in the excitation inductance of the main transformer \({L}_{c}\) and the equivalent capacitance to the ground \({C}_{d}\) are converted to each other, and parallel oscillation is formed between them, thus generating operating overcurrent. Where \({U}_{s}\) is the supply voltage of the catenary, \({L}_{s}\) is the sum of the inductance of the catenary and rail, and \({R}_{s}\) is the sum of the resistance of the catenary and rail. The action of switch K simulates the action process of a circuit breaker.
During the transient process of train pantograph lifting, the traction substation charges the equivalent capacitance to the ground through the catenary loop. Because the equivalent capacitance is small, high-frequency oscillation occurs in the loop, and its oscillation angular frequency is much higher than the power frequency 50 Hz so that the power supply voltage can be equivalent to a constant voltage source. Considering the most unfavorable situation, when the power supply voltage waveform is at the peak, the train lifts the pantograph to close the circuit breaker, and the frequency domain equation of the circuit structure in Fig. 4 is as follows:
The frequency domain expression of voltage derived from formula (1) is:
When t = 0, the voltage is 0, and the time domain expression of the voltage is:
Dividing the above formula by the capacitance impedance \({Z}_{d}\), we finally get the time domain expression of instantaneous overcurrent when the train closes the circuit breaker:
Accordingly, when the train closes the circuit breaker, the magnitude of the loop overcurrent is related to the inductive and capacitive elements. When \(t = {\pi / {\omega_0 }}\), there may be an operating overcurrent close to 12 times the steady-state current, then the overcurrent gradually attenuates with the increase of time, and the attenuation speed is related to the parameter values of the resistive and inductive components in the loop.
2.3 Simulation Analysis of Interference Sources
According to the generation mechanism of overcurrent when the circuit breaker is closed in Sect. 2.2, we select specific conditions for analysis. The waveform of overcurrent at the pantograph, when the train turns on the circuit breaker is obtained through simulation calculation, as shown in Fig. 5.

Overcurrent waveform of train pantograph lifting

Measured overcurrent of train pantograph lifting
When observing the local waveform, the pulse curve is characterized by a decaying oscillation waveform, lasting for a short time, and the highest pulse reaches about 12 times the steady-state current. It can be seen that this pulse conforms to the characteristics of overcurrent and is in good consistency with the measured waveform in Fig. 6.
The peaks of the five highest pulses are taken from the graph. According to the traction current distribution ratio [14], the rail current ratio is 50% ~ 60%. The calculated overcurrent values are 295 A, 253 A, 219 A, 180 A, and 155 A, respectively, which are used to calculate the induced voltage of the axle counter cable core.
The actual measurement of the overcurrent waveform in the rail at the moment of closing the train circuit breaker on site is shown in Fig. 6. The curve form of this pulse is consistent with the simulation results, and the highest vibration can reach 10–12 times the steady-state current. The attenuation of the overcurrent peak conforms to the characteristics of the zero-input response attenuation process of second-order circuits, similar to the operation of continuously repeating the energy stored by the inductor to charge the capacitor in an RLC series circuit and discharging the capacitor through the inductor until the attenuation reaches the minimum value.
3 Calculation Method of Cable Inductive Coupling
3.1 Structure and Parameters of Typical Axle Counter Cable
Axle counter cable should use “aluminum sheathed digital signal cable,” “aluminum sheathed railway axle counter cable,” or “digital signal cable shielded in railway” [15]. This paper takes “aluminum sheathed railway axle counter cable” as the research object analyzes and calculates it, and the cable section structure is shown in Fig. 7.

Structural drawing of axle counter cable
Among them, steel belt armor and aluminum sheath are collectively called cable sheaths, and single-ended grounding of axle counter cable means grounding them simultaneously. The steel belt armor thickness is 0.2 mm, and the outer sheath, inner liner, and copper core diameters are 17.6 mm, 13.3 mm, and 1.53 mm, respectively.
3.2 Theoretical Calculation of Induced Voltage
According to the magnetic induction theory [16], the induced voltage of overcurrent in the rail on the signal cable core is calculated by the formula (5) [17], where \(\omega \) is the angular frequency of the interference current (rad/s); \(M\) is the mutual inductance coefficient between the interference line and signal cable (H/km), and \(l\) is the parallel approach length between them (km); \(I\) is the interference current magnitude (A); \(S\) is the comprehensive shielding coefficient of the cable.
The mutual inductance coefficient between the steel rail and the core wire of the axle counter cable is calculated by the formula (6) ~ (10) [18], where \(x\) is the horizontal distance between two lines (m); \(y\) is the height from the ground to the axle counter cable (m); \(\eta \) is the height of the steel rail (m); \(\omega \) is the angular frequency of the current; \(\mu \) is the product of vacuum magnetic permeability and relative magnetic permeability of the earth; \(\sigma \) is the earth’s conductivity coefficient (Ω/m);; \({H}_{1}\) is a first-order Strove function; \({Y}_{1}\) is a first-order Lyman function.
Generally, the axle counter cable is grounded at a single end, concluded \(S=1\). The induced voltage of the axle counter cable core can be calculated as \(E = \omega MIl\).
4 Case Analysis
The disturbed waveform of an axle counter on a particular line is shown in Fig. 8 [19]. Observing the yellow vertical axis, the signal received by the amplification board exceeds the sector occupancy threshold of 8.39 V. The axle counter incorrectly outputs occupancy information in the corresponding section, affecting operational efficiency.

Schematic diagram of fault waveform of axle counter

Variation curve of induced voltage of axle counter cable
The distance between the axle counter cable and rail is generally 1–1.5 m. Considering the variable distance and rail overcurrent values of 295 A, 253 A, 219 A, 180 A, and 155 A, referring to Sect. 3.2, the induced voltage of the axle counter cable is calculated in Fig. 9.
For an axle counter cable with a length of 1 km parallel to the rail, when 295 A overcurrent flows into the rail, the induced voltage generated on the core of the axle counter cable is 10.09 V; When a 280 A overcurrent flows into the rail, the induced voltage generated by the core of the axle counter cable is 8.652 V, causing the voltage received by the amplifier board to exceed the threshold of 8.39 V of the occupancy state voltage indicator. The corresponding section outputs occupancy information incorrectly. When the rail overcurrent value is 295 A, the transient induced voltage on the axle counter cable with a length of 1 km parallel to the rail is calculated, as shown in Fig. 10.

Transient induced voltage of axle counter cable
The overcurrent generated at the moment of closing the main circuit breaker of the train causes significant transient disturbance in the induced voltage waveform of the axle counter cable, up to 10 V. The quick process lasts for a short time, and the amplitude decays to a lower level after about 10 ms, consistent with Fig. 5.
5 Conclusion
Based on the electromagnetic induction theory, this paper analyzes, calculates, and simulates the impact of strong electrical interference in urban railways on axle counters.
-
(1)
By analyzing the axle counter working principle, it is confirmed that the AC magnetic field formed by rail overcurrent will cause EMI to the axle counter cable laid along the line. Clarifying the interference source, the curve and value of overcurrent are obtained and verified. The duration is about 10 ms, and the maximum pulse amplitude can reach nearly 12 times the steady-state current.
-
(2)
The simulation analysis of pantograph overcurrent indicates that the overcurrent generated at the closing moment of the train circuit breaker causes apparent transient disturbance in the axle counter cable-induced voltage waveform. The duration of the temporary process is in good agreement with that of the interference source.
-
(3)
Based on the axle counter cable configuration and the overcurrent simulation, it is inferred that under specific conditions, the highest induced voltage of the axle counter cable is 10.09 V, greater than the threshold of 8.39 V for the voltage index of the amplification board occupancy state, causing the axle counter to miscalculate axle number.
References
Zhou, T., Zhang, J., Cao, W.: Research on EMI of axle counter caused by overcurrent of intercity vehicle circuit breaker operation. Railway Stand. Des. 67(5), 151–157 (2023). (in Chinese)
Su, L., Zhang, C., Fu, L., et al.: Testing and analysis of the electromagnetic effects of high-speed railway traction reflux on signal cables. Environ. Technol. 2014(z2), 63–67 (2014). (in Chinese)
Wang, G.: Dangerous impact and protection plan of signal cables in urban Railways. Railway Commun. Signal Eng. Technol. 19(2), 65–69 (2022). (in Chinese)
Charalambous, A., Cotton, I., Aylott, P.: A simulation tool to predict the impact of soil topologies on coupling between a light rail system and buried third-Party infrastructure. IEEE Trans. Veh. Technol. 57(3), 1404–1416 (2008)
Zhang, Y., Zhang, D., et al.: Anti–interference analysis for the grounding methods of cable shielding line. Foreign Electron. Meas. Technol. 29(11), 29–41 (2010)
Liu, C., Yang, S., Cui, Y., et al.: An improved quantitative assessment method on hazardous interference of power lines to the signal cable in high-speed railway. IET Electr. Syst. Transp. 12(1), 65–78 (2022)
Yang, S., Zhang, X., Liang, Y., et al.: Research on grounding methods of railway signal cables and longitudinal electromotive force testing. J. Instrum. Meters 34(2), 254–259 (2013). (in Chinese)
Huang, L.: Discussion on key issues in the urban railway TPSS design. Urban Mass Transit. 25(6), 124–127, 133 (2022) (in Chinese)
Liu, W., Liu, X., Wang, H., et al.: Power supply scheme and power flow algorithm for urban railway traction cable connection. J. Southwest Jiaotong Univ. 56(4), 689–697 (2021). (in Chinese)
Liao, W., Wu, D., Guo, T., et al.: Analysis and research on the red light band of axle counter on Wenzhou urban Railway S1 line. Railway Technol. Innov. 2022(3), 82–87 (2022). (in Chinese)
Wang, P., Huang, J., Yuan, D., et al.: Research and analysis on disturbance of urban rail transit axle counter. Autom. Instrum. 37(1), 6–9, 29 (2022) (in Chinese)
Assefa, A., Kebede, B., Legese, D.: Harmonic analysis of TPSS: a case study of Addis Ababa light rail transit. IET Electr. Syst. Transp. 11(4), 391–404 (2021)
Yudhistira, Y., Yoppy, Y., Trivida, E., et al.: EMI measurement for axle counters light rapid transit railway in Indonesia. Int. J. Electr. Comput. Eng. 12(5), 4632 (2022)
Feng, D., Sun, X., Shang, C., et al.: Cost–effectiveness oriented intelligent maintenance scheduling optimization for TPSS of high-speed railway. IEEE Trans. Intell. Transp. Syst. 1–15 (2022)
Technical specifications for axle counter in urban rail transit, https://www.doc88.com/p-10387842157012.html, last accessed 2022/03/25 (in Chinese)
Meng, Z.: Introduction to Electromagnetic Fields. China Electric Power Publishing House, Beijing (2008). (in Chinese)
Pang, T., Cui, D., et al.: The Impact and Protection of Power Lines on Telecommunications Lines. Water Resources and Electric Power Publishing House, Beijing (1987). (in Chinese)
Gao, Y.: Inductive Coupling and Resistive Coupling. Posts and Telecommunications Press, Beijing (1979). (in Chinese)
Wu, S., Wu, M., Li, L., et al.: Analysis and comparison of MMC–based co-phase traction power supply topology for autotransformer power supply system. IEEE Trans. Power Delivery 37(5), 4053–4063 (2022)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 Beijing Paike Culture Commu. Co., Ltd.
About this paper

Cite this paper
Liu, R., Yang, S., Liu, C., Zhang, J., Liu, H. (2024). Simulation and Analysis of the Impact of EMI from Urban Railway Traction System on Axle Counter. In: Yang, J., Yao, D., Jia, L., Qin, Y., Liu, Z., Diao, L. (eds) Proceedings of the 6th International Conference on Electrical Engineering and Information Technologies for Rail Transportation (EITRT) 2023. EITRT 2023. Lecture Notes in Electrical Engineering, vol 1136. Springer, Singapore. https://doi.org/10.1007/978-981-99-9315-4_19
Download citation
DOI: https://doi.org/10.1007/978-981-99-9315-4_19
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-9314-7
Online ISBN: 978-981-99-9315-4
eBook Packages: EngineeringEngineering (R0)