
Abstract
Moving vehicle excites the bridge with dynamic force which is realised as a stationary process when the vehicle velocity is constant. However, this condition is not always true when the vehicle speed varies with time while travelling over the bridge. In this paper, the bridge response to non-stationary excitation has been studied considering speed variation, uneven pavement and also random arrival rate of the vehicle. The bridge vehicle interaction has been modelled using continuum approach and the solution has been obtained using orthogonal polynomial expansion method. The generalised co-ordinates of the system response are expressed in terms of orthogonal polynomial series, which offered certain advantages to arrive at the expression of first and second order statistics of system response using the properties of the polynomial. The movement of multiple vehicles has been considered in different time windows assuming their arrival rate follows a Poisson process. Response statistics- mean and standard deviation has been studied for a single cell box girder section of single span bridge in different time windows to observe the effect of vehicle arrival rate, vehicle speed and acceleration and pavement unevenness. The amplification of maximum static flexural stress due to dynamic effect has been obtained incorporating the standard error of the mean. Sequence of accelerating vehicles is found to cause higher stress in a bridge with poor maintenance of surface. The segment of response history in an optimal time window is found to decrease the computational cost since the presence of total number of vehicles over the bridge were dependent on the vehicle speed and their arrival rate.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The dynamic response of bridge considering vehicular movement has been studied by various researchers. Most of them have idealised bridge as a beam which can be simply supported or continuous [1]. In all of these models, the vehicle loads have been idealised as several concentrated loads [1]. However, in these works the effect of interaction between bridge and vehicle is not considered. In order to take the effect of bridge vehicle interaction, the vehicle has been modelled as spring mass dashpot system [2, 3] and the same has been considered in obtaining the bridge dynamic response [2, 4, 5]. In the above works, the effect of road surface roughness has not been considered, which also plays an important role in the dynamic response of the bridge. The effect of road surface roughness and bridge vehicle interaction has been considered to evaluate the dynamic response of the bridge and it has been observed from the studies that the dynamic response of the bridge is affected by the road surface roughness [6, 7].
In the above studies, the bridge response was obtained by taking deterministic vehicular loads [6,7,8,9]. However, the vehicular loads arriving on the bridge in terms of number of vehicles, axle weight, axle interval and vehicle velocity are random in nature. Hence, some of the researchers have studied the bridge dynamic response due to the random nature of the vehicles passing on the bridge assuming vehicle arrival to be a random variable [10, 11]. It was also observed from the studies that the response of vehicle induced by pavement irregularity becomes a stationary random process in time domain when the vehicle velocity is assumed to be constant. The response of vehicle induced by pavement irregularity becomes a non-stationary random process in time domain when the vehicle velocity is varying with time [12,13,14,15,16]. The non-stationary response of a vehicle travelling on homogeneous road surface has been analysed using state space approaches [12, 13]. The non-stationary response of vehicle was also obtained in which the equations of motion were first established in space domain and then covariance of the response was computed in time domain [14]. A Monte Carlo simulation technique was used to simulate the deck profile for generating input samples in numerical integration of the system equations. This was used to obtain the non-stationary response of the vehicle [16].
Thus it is evident from the studies conducted that very less work has been done to evaluate the non-stationary response of the bridge when the vehicle travels at variable velocity. In addition, it has been observed that most of the vehicular loads on the bridge are taken as deterministic in nature and have considered the effect of single vehicular movement. Hence, this paper presents a methodology to evaluate the bridge response considering random vehicular loads, multiple vehicular movement and variable velocity. Further, DAF has been evaluated for different bridge and vehicle parameters.
2 Methodology
In the present work, the vehicle arrival time is assumed as a random variable following Poisson process. The bridge response considering random vehicle arrival time and bridge vehicle interaction is obtained using Orthogonal Polynomial Expansion Method. The bridge considered in the study is a simply supported bridge with single span. It is idealised as a Euler–Bernoulli beam with uniform cross section. The vehicle is modelled as a quarter car model. The road surface roughness is assumed to be Gaussian process with zero mean and is represented by a power spectral density function. In addition to the road surface roughness, the mean surface of the bridge deck has been considered as a half sine wave. This represents the pre-chamber of the bridge.
2.1 Theoretical Formulation
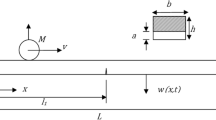
The multiple vehicle movement modelled as quarter car model on the single span bridge has been shown in Fig. 1.

Vehicle movement on bridge
The deck profile is represented by,
The position of vehicle from the reference station along the bridge span at any time instant is given by
In Eq. (2), the coefficients ap represent different conditions of the vehicle motions. The coefficients a0 and a1 have non-zero values while the remaining coefficients are zero when the vehicle velocity is constant. The velocity of the vehicle at any time instant is obtained by taking the first derivative of Eq. (2) with respect to x.
A series of cosine terms with random phase angles and a certain probability density function have been used to calculate the road surface roughness [17], which is given by
The parameters As and Ωs are taken from Yin et al. [17].
The governing differential equation is written after expanding C, K and F using Taylor series [18] as
where, C, K and F with subscript λtn represent the differentiation of the variable with respect to \(\tilde{\lambda }t_{n}\), which is computed at \(t = \tilde{\lambda }t_{n}\). M, C and K are the mass matrix consisting of bridge and vehicle mass, damping matrix consisting of bridge and vehicle damping and stiffness matrix consisting of bridge and vehicle stiffness. The response \(\tilde{X}\) is expressed as the summation of product of transformed time dependent coordinate and orthogonal polynomial function as,
Since, the vehicle arrival time follows Poisson process, the distribution of arrival time is Gamma distribution. The probability density function of \(\tilde{\lambda }t_{n}\) is given as [19]
Since the distribution of arrival time is Gamma distribution, Associated Laguerre Polynomial is the orthogonal polynomial function considered [20] in the present study which is found to satisfy the orthogonality condition. The response statistics have been found using the recurrence relationships [20] shown in Eq. (7).
Substitute Eq. (5) in Eq. (4),
In order to find the response statistics of the bridge, Eq. (8) has to be multiplied by \(L_{k}^{n} \left( {\tilde{\lambda }t_{n} } \right)\). Further, the recurrence relation shown in Eq. (7) has to be used and the resulting equation has to be multiplied by probability density function \(p_{{\tilde{\lambda }t_{n} }} \left( {\tilde{\lambda }t} \right)\) and integrated in the domain of the random variable using the orthogonality property of the polynomial considered. The resulting equation is given as,
where,
In Eq. (10), the value of k changes from 0 to N1. Newmark’s Method [21] has been used to solve Eq. (10) to obtain the time variation of displacement Q.
2.1.1 Expectation of the Response Vector
Using the property of orthogonal polynomial function, the expectation of the response has been evaluated and is shown below,
2.1.2 Standard Deviation of the Elements of the Response Vector
The covariance of the elements of the response vector is written as,
In Eq. (12),
Equation (13) is simplified using the property of orthogonal polynomials and is given as
The covariance of the elements of the response vector is written by substituting Eqs. (18) and (15) in Eq. (16) which is shown below,
Due to the presence of Kronecker delta, Eq. (15) is simplified further and is given as,
The variance of the elements of the response vector is evaluated by substituting \(t_{1} = t_{2} = t\) in Eq. (16), and is given as
DAF is evaluated using the obtained response statistics of the bridge, which is the mean and standard deviation.
3 Dynamic Amplification Factor (DAF)
In bridge design, dynamic analysis is not considered. This is because several codes have suggested DAF to amplify the static effect. It is also observed that the DAF suggested in various codes only depends on the span length. However, parameters such as vehicle velocity, road surface roughness and vehicle acceleration have not been considered in the evaluation of DAF [22]. From the previous study, it is observed that DAF depends on the above parameters [23]. In the present work, the effect of DAF on the mentioned parameters has been studied.
The DAF is evaluated considering the effect of mean and standard deviation of flexural stresses, which is given as,
The static response is obtained by traversing the vehicles at 5 km/hr. The maximum dynamic response is given as,
where, Ef(x, t) is the standard error of the mean (SEM) defined as [23]
The maximum dynamic response in Eq. (19) takes into account the effect of mean and standard deviation of flexural stresses.
4 Numerical Study
The bridge considered for study is a single span box girder of span length 30 m with twin cell cross section. The ratio of vehicle suspension and tyre stiffness ratio is 4.0; fundamental natural frequency of the bridge is 4.5 Hz; vehicle weight is 40 tonnes; for the road surface roughness, ΩL is taken as 0.1 cycle/m and ΩU is taken as 2 cycle/m [24]. The mean profile is assumed to be sinusoidal with an amplitude of 0.01 m. The response is evaluated when the vehicle is at the mid-span of the bridge. The road roughness coefficient considered for good and very poor road case is 32 × 10–6 m2/cycle/m and 1024 × 10–6 m2/cycle/m respectively [25].
To account for multiple vehicular movement on the bridge, the flexural stresses are obtained for different time windows. The vehicle velocity considered is 20 km/hr, 40 km/hr and 60 km/hr. The window kept for vehicle movement is changed from 10 to 25 s. The comparison of mean flexural stresses for the time windows is shown in Table 1 for good and very poor road conditions. The comparison of standard deviation of flexural stresses for the above-mentioned time windows is shown in Table 2 for good and very poor road conditions. The numerical analysis has been done using MATLAB.
From Tables 1 and 2, it is observed that the mean and standard deviation of the flexural stresses do not vary significantly as time window changes from 20 to 25 secs. The time window for evaluating DAF may be reasonably taken not above 20 secs. The DAF varying the arrival rate of the vehicle, road surface roughness, vehicle velocity and acceleration of the vehicle is obtained.
4.1 Parametric Variations
The factors that are varied to observe the effect on Dynamic Amplification Factors are:
-
1.
Variable vehicle velocity
-
2.
Arrival rate of the vehicle
-
3.
Road surface roughness.
4.1.1 Variable Vehicle Velocity
The variable vehicle velocity is obtained using Eq. (2). The vehicle is made to accelerate at 0.5 m/s2, 1 m/s2 and 1.5 m/s2. The mean flexural stresses obtained after varying the acceleration are then compared with the mean flexural stress for a constant vehicle velocity. The comparison plot for 20 km/hr vehicle velocity and very poor road condition is shown in Fig. 2. The arrival rate of the vehicle is considered as 2 vehicles per second.

Comparison of mean stress for different values of acceleration for velocity 20 km/hr and very poor road surface
The maximum value of mean stress when there is no acceleration is 19.3 MPa, 0.5 m/s2 is 20 MPa, 1 m/s2 is 23 MPa and 1.5 m/s2 is 28 MPa. The increase in acceleration values increases the mean flexural stresses. This is because it increases the longitudinal vibration of the bridge.
The mean flexural stresses and the standard deviation of flexural stresses for good and very poor for acceleration of the vehicle 1.5 m/s2 and varying the vehicle velocity are shown in Figs. 3, 4, 5 and 6.

Comparison of mean stress for varying velocity with acceleration 1.5 m/s2 and good road surface

Comparison of mean stress for varying velocity with acceleration 1.5 m/s2 and very poor road surface

Comparison of standard deviation of flexural stress for varying velocity with acceleration 1.5 m/s2 and very good road surface

Comparison of standard deviation of flexural stress for varying velocity with acceleration 1.5 m/s2 and very poor road surface
It is observed from Figs. 3 and 4 that the mean flexural stresses are higher for lower velocity since the duration of loading is more for lower velocity as compared to higher velocity. The standard deviation of the flexural stresses does not follow the same trend as shown in Figs. 5 and 6. The DAF for varying the acceleration of the vehicle for different initial vehicle velocities and arrival rate of 2 vehicles per second for very poor road case is shown in Fig. 7.

Comparison of DAF with acceleration of the vehicle for different initial vehicle velocities and arrival rate of 2 vehicles per second for very poor road conditions
It is observed from Fig. 7 that the mean flexural stresses are higher for lower velocity since the duration of loading is more for lower velocity as compared to higher velocity leading to higher DAF for lower vehicle velocity. Also, there is a significant change in the DAF when the vehicle velocity is considered constant and when the vehicle velocity is variable as seen from Fig. 7.
4.1.2 Arrival Rate of the Vehicles
The arrival rate of the vehicles is varied from 1 vehicle per second to 3 vehicles per second for initial vehicle velocity of 20 km/hr and vehicle acceleration of 1.5 m/s2. The road condition considered is very poor. The mean and standard deviation of the flexural stresses for different arrival rates are shown in Figs. 8 and 9.

Comparison of mean stress for varying arrival rate

Comparison of standard deviation of flexural stress for varying arrival rate
It is observed from Fig. 8 that higher arrival rates signify more vehicular movement on the bridge leading to higher dynamic stresses. The standard deviation of the flexural stresses follows the same pattern as the mean flexural stresses for varying arrival rates as shown in Fig. 9. The DAF for varying arrival rates for initial vehicular velocities 20 km/hr, 40 km/hr and 60 km/hr is shown in Fig. 10.

Comparison of DAF with arrival rate of the vehicle for very poor road conditions
It can be observed from Fig. 10 that the DAF increases upto 2 vehicles per second and decreases till arrival rate 3 vehicles per second. The increase in DAF can be due to an increase in the dynamic forces. However, as the arrival rate increases from 2 vehicles per second, the static forces also increase leading to a decrease in the DAF.
4.1.3 Road Surface Roughness
The deterioration in road surface condition leads to higher flexural stresses as the dynamic forces due to the vibratory motion of the vehicle on the bridge increases as shown in Figs. 3, 4, 5 and 6. The DAF for different road surface roughness for an initial vehicle velocity of 20 km/hr and arrival rate of 2 vehicles per second is shown in Fig. 11.

Comparison of DAF with acceleration of the vehicle for initial vehicle velocity 20 km/hr and arrival rate of 2 vehicles per second for good and very poor road conditions
It is observed from Fig. 11 that the DAF increases with deteriorating road surface conditions. This is because bridge experiences higher dynamic forces due to very poor road surface condition.
5 Conclusions
The present study outlines an approach for the evaluation of response statistics of a single span bridge for random arrival time of the vehicles based on orthogonal polynomial expansion method. The DAF is evaluated using the response statistics obtained from the method. Parameters such as vehicle velocity, arrival rate of the vehicles, acceleration of the vehicles and road surface roughness are considered to study the effect on DAF. Based on the results obtained from the study described above, the main conclusions are as follows:
-
1
The optimum time window to evaluate the DAF is considered as 20 secs.
-
2
The mean flexural stresses are higher for lower vehicle velocity.
-
3
The DAF increases with the road surface irregularity and decreases with increase in vehicle velocity for a single span bridge.
-
4
The DAF increases for arrival rate up to 2 vehicles per second and then decreases further for a single span bridge.
-
5
The DAF increases for higher acceleration of the vehicles. Vehicle acceleration may contribute significantly to bridge response and the resulting DAF may exceed those adopted in current design codes.
Abbreviations
- DAF:
-
Dynamic Amplification Factor
- SEM:
-
Standard Error of the Mean
- DI:
-
Dynamic Increment
- As:
-
Amplitude of cosine wave
- cs:
-
Suspension damping
- cw:
-
Tyre damping
- C:
-
Damping matrix
- Cmean:
-
Mean values of damping matrix
- F:
-
Force vector
- Fdynamic:
-
Maximum dynamic response on the bridge
- Fmean:
-
Mean values of force vector
- Fstatic:
-
Maximum static response of the bridge
- h(\(\tilde{x }\)):
-
Bridge deck profile
- hmean(\(\tilde{x }\)):
-
Deterministic mean surface profile
- hroad(\(\tilde{x }\)):
-
Random road roughness of the pavement
- ks:
-
Suspension stiffness
- kw:
-
Trye stiffness
- K:
-
Ztiffness matrix
- Kmean:
-
Mean values of stiffness matrix
- L:
-
Span of the bridge
- \({L}_{l}^{n}\left(\stackrel{\sim }{\lambda }{t}_{n}\right)\):
-
Orthogonal function considered
- ms:
-
Sprung mass
- mw:
-
Unsprung mass
- M:
-
Mass matrix
- n:
-
Shape parameter of Gamma distribution and represents number of vehicle arrivals
- nd:
-
Number of degrees of freedom
- N:
-
Number of terms used to construct the road surface roughness
- Ns:
-
Number of samples
- N1:
-
Number of basic functions with respect to \(\stackrel{\sim }{\lambda }{t}_{n}\)
- ptn(t):
-
Probability density function of the arrival time
- Qil(t):
-
Time variation of displacement
- \(\tilde{x }\):
-
Spatial distance
- tn:
-
Vehicle arrival time on the bridge
- v:
-
Velocity of vehicle
- \({\text{y}}\left( {\tilde{x},{\text{t}}} \right)\):
-
Displacement of the bridge at time instant, t at location, \(\tilde{x }\)
- z1:
-
Displacement of sprung mass
- z2:
-
Displacement of unsprung mass
- δlk:
-
Kronecker delta function
- Г:
-
Gamma function
- \(\stackrel{\sim }{\lambda }\):
-
Mean arrival rate
- µ(\(\stackrel{\sim }{\lambda }{t}_{n}\)):
-
Mean arrival time
- \(\mu_{{\text{f}}} \left( {\tilde{x},{\text{t}}} \right)\):
-
Mean of bridge response
- \(\sigma_{{\text{f}}} \left( {\tilde{x},{\text{t}}} \right)\):
-
Standard deviation of bridge response
- θs:
-
Independent random phase angle uniformly distributed from 0 to 2π
- ΩL:
-
Lower cut off frequencies of spatial unevenness
- Ωs:
-
Spatial frequency (c/m)
- ΩU:
-
Upper cut off frequencies of spatial unevenness
References
Fryba L. Dynamics of railway bridges. Academia Praha; 1996.
Blejwas TE, Feng CC, Ayre RS. Dynamic interaction of moving vehicles and structures. J Sound Vib. 1979;67(4):513–521. https://doi.org/10.1016/0022-460X(79)90442-5
Green MF, Cebon D. Dynamic interaction between heavy vehicles and highway bridges. Comput Struct. 1997;62(2):253–264. https://doi.org/10.1016/S0045-7949(96)00198-8
Yang YB, Lin CW. Vehicle-bridge interaction dynamics and potential applications. World Scientific Publishing Co. Pte. Ltd; 2004. https://doi.org/10.1016/j.jsv.2004.06.032
Zeng Q, Stoura CD, Dimitrakopoulos EG. A localized lagrange multipliers approach for the problem of vehicle-bridge-interaction. Eng Struct. 2018;168:82–92. https://doi.org/10.1016/j.engstruct.2018.04.040.
Coussy O, Said M, van Hoove J-P. The influence of random surface irregularities on the dynamic response of bridges under suspended moving loads. J Sound Vib. 1989;130(2):313–320. https://doi.org/10.1016/0022-460X(89)90556-7
Frýba L. Vibration of solids and structures under moving loads. London: Thomas Telford Ltd.; 1972.
Pesterev AV, Bergman LA, Tan CA, Tsao TC, Yang B. On asymptotics of the solution of the moving oscillator problem. J Sound Vib. 2003;260(3):519–536. https://doi.org/10.1016/S0022-460X(02)00953-7
Frýba L. Non-stationary response of a beam to a moving random force. J Sound Vib. 1976;46(3):323–338. https://doi.org/10.1016/0022-460X(76)90857-9
Sniady P. Vibration of of a beam due to a random stream of moving forces with random velocity. J Sound Vib. 1984;97(1):23–33.
Turner JD, Pretlove AJ. A study of the spectrum of traffic-induced bridge vibration. J Sound Vib. 1988;122(1):31–42. https://doi.org/10.1016/S0022-460X(88)80004-X
Virchis VJ, Robson JD, Response of an accelerating vehicle to random road undulations. Journal of Sound and Vibration; 1971. 18(3): 423–71.
Hammond JK, Harrison RF. Non-stationary response of vehicles on rough ground. J Dyn Syst Meas Control Trans ASME. 1981;103(3):245–50.
Nigam NC, Yadav D. Dynamic response of accelerating vehicles to ground roughness. In: Proceedings Noise shock and veibration conference. Monas University; 1974. pp. 280–5.
Hwang JH, Kim JS. On the approximate solution aircraft landing gear under non-stationary random excitations. KSME Int J. 2000;14(9):968–77.
Sasidhar MN, Talukdar S. Non-stationary response of bridge due to eccentrically moving vehicles at non-uniform velocity. Adv Struct Eng. 2003;6(4):309–24.
Yin X, Fang Z, Cai CS, Deng L. Non-stationary random vibration of bridges under vehicles with variable speed. Eng Struct. 2010;32(8):2166–2174. https://doi.org/10.1016/j.engstruct.2010.03.019
Li J, Chen J. Stochastic dynamics of structures. Wiley (Asia) Pte Ltd; 2009.
Nigam NC. Introduction to random vibrations. Masachusetts, London, England: The MIT Press Cambridge; 1983.
Schoutens W. Lecture notes in statistics. In: Bickel P, Diggle P, Fienberg S, Krickeberg K, Olkin I, Wermuth N, Zeger S (Eds.), Stochastic processes and Orthogonal polynomials. Springer; 2000. https://doi.org/10.1007/978-1-4612-1470-0
Chopra AK. Dynamic of structures theory and applications to earthquake engineering. (W. J. Hall, Ed.) (Fourth). Prentice Hall; 2011.
IRC 6. Standard specifications and code of practice for road bridges, section-II Loads and stresses. Indian Road Congress, New Delhi, 2017.
Humar JL, Kashif AM. Dynamic response of bridges under travelling loads. Canadian J Civil Eng. 1993;20(2):287–298. https://doi.org/10.1139/l93-033
DeCoursey W. Statistics and probability for engineering applications. Elsevier; 2003.
Sun L, Kennedy TW. Spectral analysis and parametric study of stochastic pavement loads. J Eng Mech. 2002;128(3):318–327. https://doi.org/10.1061/(ASCE)0733-9399(2002)128:3(318)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Pillai, A.J., Talukdar, S. (2023). Non-stationary Response of a Bridge Due to Moving Vehicle with Random Arrival Rate. In: Tiwari, R., Ram Mohan, Y.S., Darpe, A.K., Kumar, V.A., Tiwari, M. (eds) Vibration Engineering and Technology of Machinery, Volume I. VETOMAC 2021. Mechanisms and Machine Science, vol 137. Springer, Singapore. https://doi.org/10.1007/978-981-99-4721-8_7
Download citation
DOI: https://doi.org/10.1007/978-981-99-4721-8_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-4720-1
Online ISBN: 978-981-99-4721-8
eBook Packages: EngineeringEngineering (R0)