
Abstract
This work introduces a semi-analytical approach to illustrate the linearized vibration of clamped–clamped beams in the nonlinear regime due to the effect of static load. The von Karman strain and Hamilton’s principle are utilized to derive the genernal nonlinear equations of beams under static and acoustic pressure load. The nonlinear dynamic problem is analyzed in two parts: the nonlinear static problem and the linearized vibration around the nonlinear static equilibrium state. The modal equation under initial large deflection is a variable coefficient partial differential equation and is difficult to obtain an analytical solution. An approximate solution is performed by the transfer-matrix method and local homogenization. The analysis shows that the variation of pressure load affects the static deflection and the dynamic characteristics of the beam. With the gradual increase of the pressure load, the deflection of the beam has a great influence on the higher-order modal shapes of the beam. And the peak value of the modal shapes near the center of the beam is lower than the sides.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
During the service of a hypersonic vehicle, it has to endure a very complex dynamic environment, such as high dynamic pressure and acoustic pressure load. Clamped–clamped structures exhibit complex geometric nonlinear response characteristics under combined loads. The strain does not exceed the elastic limit, but the static equilibrium and vibration differential equations with large deflection show nonlinear characteristics.
Takabatake [1] clarify the effect of dead loads on the static characteristics of the beam. Furthermore, he considered the effect of dead loads on the dynamic characteristics of beams [2, 3] and plates [4] utilizing suitable assumptions. Zhou et al. [5] developed a load-induced stiffness matrix that considers the stiffening effect of dead loads. And the natural frequencies of beams are calculated using Finite-element methods. Saha et al. [6] studied the large amplitude free vibration of plates based on static analysis by an iterative numerical scheme. Banerjee et al. [7] utilized the nonlinear shooting and Adomain decomposition methods to analyze the large deflection of beams. Wang et al. [8] investigated the effect of static load on the vibro-acoustic characteristics of plates. Carrera et al. [9] developed a geometrical nonlinear total Lagrangian formulation to analyze the vibration modes of beams in the nonlinear regime.
In this paper, a semi-analytical approach is established to illustrate the linearized vibration of clamped–clamped beams in the nonlinear regime due to the effect of static load. By using the Rayleigh–Ritz method and transfer matrix method, the effect of static pressure load on the natural frequencies and modal shapes of beams are studied.
2 Basic Theory
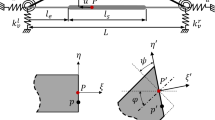
A clamped–clamped rectangular beam under pressure load, as shown in Fig. 1, is considered in this study. The L, b and h are the length, width, and thickness of the beam. The P is the pressure load. The axial displacement components in the midplane are assumed as zero. Suppose that (u, w) denotes the total displacements of a point along the (x, z) coordinates. The von Karman strain and Hamilton’s principle are utilized to derive the nonlinear static equilibrium equations and nonlinear governing equations of the beam. The basic assumptions made to derive the equation can be summarized as follows:

A clamped–clamped rectangular beam under pressure load
-
(1)
Assuming the deformation of the beam obeying the hypothesis of the Bernoulli–Euler beam equation.
-
(2)
All strain components are small enough to satisfy Hooke’s law.
2.1 Semi-analytical Approach for Nonlinear Static Deflection
The Von Karman nonlinear strain–displacement relationships are
where ε0x is the normal strain at an arbitrary point of the beam.
According to Hamilton’s principle, the static equilibrium equations can be derived by
where δ is the variational operator. Up and Wp represent the strain energy and the potential energy, respectively, which can be written as
where E, A, and I are Young’s modulus, the cross-sectional area, and the cross-sectional moment of inertia, respectively. Furthermore, P0 is the static pressure load and w0 is the deflection.
Analytical solutions for the deflection are obtained using Navier’s solution technique. The solution, which satisfies the clamped–clamped boundary conditions, can be assumed as follows.
Substituting Eq. (5) into the Eq. (2). According to the Rayleigh–Ritz method and the variational principle, the static equilibrium equations can be variationally calculated as
The value of coefficients am can be solved by numerical methods.
2.2 Semi-analytical Approach for Modal Analysis
The governing nonlinear equations of vibration with Von Karman strain can be expressed as
where P is the combined load of dynamic pressure P0 and acoustic pressure P1. And the transverse displacement w can be divided into static deflection w0(x) and dynamic vibration w1(x, t). The Eq. (7) can be expressed as
It is assumed that dynamic pressure is much greater than acoustic pressure. The deformed state w0(x) is defined as the reference state, and the vibration w1(x, t) is act on this reference state. The rotations under acoustic pressure are neglected. The Eq. (8) can be rewritten as
Due to the dynamic pressure being much greater than acoustic pressure, it is assumed that the w1 is much better than w0. And the influence of w1 on w0 is ignored. The relationship between static deflection w0 and dynamic pressure P0 is expressed as
The static deflection w0 can be obtained by Sect. 2.1. And Eq. (9) can be rewritten as
The governing equation of free vibration, with the effect of static load, can be simpler as
Based on the separation of variables, the modal equation can be derived from Eq. (12), expressed as
in which ω is the natural frequency of the beam, and ϕ is the mode function. Equation (13) is a variable coefficient partial differential equation and is difficult to calculate an analytical solution. An approximate solution is performed by the transfer-matrix method based on local homogenization. The beam is divided into n segments and the modal equation of the ith beam is
According to the homogenization theory, let
The general solution of Eq. (14) is
In which, xi ≤ x ≤ xi+1, (i = 1, 2, 3, …, n). Ai, Bi, Ci, and Di are constants, which are to be determined using the boundary conditions. The displacement and force are continuous between the ith segment and the i + 1th segment which can be written as
The transfer matrix can be expressed as
In which
The relationship between the nth segment and 1st segment is
In clamped boundary conditions, the natural frequencies are determined from the roots of the polynomial
The structural modal frequency can be obtained by numerically solving Eq. (25). And then the coefficient of the general solution of each beam segment and the approximate modal shape can be obtained.
3 Numerical Results and Discussions
3.1 Verification of the Proposed Method
The following parameters are adopted for the clamped–clamped beam: E = 200 GPa, μ = 0.3, L = 350 mm, ρ = 7.93 × 10−9 t/mm3, b = 5 mm, and h = 3 mm. The static press is assumed as 0.01 MPa. The accuracy of this method is verified by ABAQUS. Through the convergence analysis, this paper takes 10 segments to solve the structural modal parameters. The Beam element B31 is adopted in ABAQUS, which includes 140 elements and 141 nodes in total. The deflection curve of the beam calculated by the two methods is shown in Fig. 2. The maximum error is 0.019 mm. The modal frequencies of the beam calculated from the proposed and ABAQUS are compared in Table 1. Results show that the modal frequencies and modal shapes obtained from the proposed method agree well with that from ABAQUS.

Comparisons of the deflection
3.2 Results and Discussion
The effect of pressure load variation on the dynamic characteristics of the beam was investigated in this section. The reference pressure load Pr = 0.01 MPa and the pressure load P was set as P/Pr = 0, 1, 3, 5. The modal frequencies and modal shapes of the beam under varied pressure loads are shown in Figs. 3 and 4 respectively.

The modal frequencies under pressure load

The modal shapes under pressure load
Results show that the modal frequencies rise with the pressure load increase. The growth rate of structural deflection gradually was reduced due to geometric nonlinearity. And the increase of modal frequencies gradually slows down. With the gradual increase of the load, the shape of first and second-order modal shapes of the beam does not change significantly, which could be expressed by an approximate trigonometric function. But the third, fourth and fifth-order modal shapes change significantly, and the peak value of the modal wave near the center of the beam is lower than the sides.
4 Conclusion
The large displacement of structures may modify the modal behavior of structures significantly. This work introduces a semi-analytical approach to illustrate the nonlinear vibration of clamped–clamped beams with the effect of static, considering the correlation of moderate rotations and nonlinear vibration.
First, based on the Rayleigh–Ritz method, the static deformation analysis under pressure is carried out through the semi-analytical method. Then, based on the static deformation analysis, the governing differential equation of the beam under initial large deformation is established. The modal equation under initial large deflection is a variable coefficient partial differential equation. Finally, the equation is approximately solved by the transfer-matrix method based on the local homogenization theory.
The analysis shows that the variation of pressure load affects the static deflection and the dynamic characteristics of the beam. With the gradual increase of the load, the deflection of the beam has a great influence on the modal shape of the beam and the peak value of the modal wave near the center of the beam is lower than the sides.
References
Takabatake H (1990) Effects of dead loads in static beams. J Struct Eng 116(4):1102–1120
Takabatake H (1991) Effect of dead loads on natural frequencies of beams. J Struct Eng 117(4):1039–1052
Takabatake H (2013) Effects of dead loads on dynamic analyses of beams subject to moving loads. Earthq Struct 5(5):589–605
Takabatake H (1992) Effects of dead loads in dynamic plates. J Struct Eng 118(1):34–51
Zhou S-J, Zhu X (1996) Analysis of effect of dead loads on natural frequencies of beams using finite-element techniques. J Struct Eng 122(5):512–516
Saha KN et al (2005) Nonlinear free vibration analysis of square plates with various boundary conditions. J Sound Vib 287(4–5):1031–1044
Banerjee A, Bhattacharya B, Mallik AK (2008) Large deflection of cantilever beams with geometric non-linearity: analytical and numerical approaches. Int J Non-Linear Mech 43(5):366–376
Wang D, Geng Q, Li Y (2018) Effect of static load on vibro-acoustic behaviour of clamped plates with geometric imperfections. J Sound Vib 432:155–172
Carrera E, Pagani A, Augello R (2019) Effect of large displacements on the linearized vibration of composite beams. Int J Non-Linear Mech 103390
Acknowledgements
The research work described in this paper was supported by the National Natural Science Foundation of China (52175220, 52125209), the Natural Science Foundation of Jiangsu Province (BK20211558), the Southeast University “Zhongying Young Scholars” Project, Postdoctoral Science Foundation of Jiangsu Province (2021K230B), and the Postgraduate Research and Practice Innovation Program of Jiangsu Province (KYCX18_0070).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Yang, X., Li, Y., Chen, Q., Fei, Q. (2023). A Semi-analytical Approach for Dynamic Characteristics of Beams with the Effect of Static Load. In: Mo, J.P. (eds) Proceedings of the 8th International Conference on Mechanical, Automotive and Materials Engineering. CMAME 2022. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-99-3672-4_6
Download citation
DOI: https://doi.org/10.1007/978-981-99-3672-4_6
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-3671-7
Online ISBN: 978-981-99-3672-4
eBook Packages: EngineeringEngineering (R0)