
Abstract
Under the background of large-scale entry of new energy like wind power and hydropower to the power grid, more and more attention has been paid to how to use the complementary characteristics of new energy output to improve the security and the power grid’s stability. In this paper, a control strategy of combined participation of wind turbines and water turbines in primary frequency regulation (PFR) considering the flexibility of standby is proposed. First, the appropriate frequency modulation reserve capacity according to the wind speed and the operation of the turbine is determined. At the initial stage of system disturbance, the fast power control capability of variable-speed wind turbine generator is used to provide PFR fast standby capacity, give full play to its advantages of quickly suppressing frequency change rate and reducing the maximum frequency deviation, and complement the inherent defects of the lagging time of primary frequency response of conventional hydropower and thermal power units and the water hammer effect of hydropower units. Subsequently, the hydropower units provide stable active power support. In the middle and later stages of disturbance, the coordination between the fan and the water turbine unit avoids the secondary frequency drop caused by the fan entering the speed recovery process, and reduces the maximum frequency deviation and response time of the system. The example analysis verifies that the frequency modulation control strategy proposed in this paper can quickly and effectively realize the frequency control under different load sudden increment.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Transmission system operators (TSOs) generally require traditional thermal power plants to provide frequency modulation services in case of power imbalance between load end and power generation. However, in recent years, a large number of renewabel energy like wind power and hydropower have been accessed to the power system, and the penetration rate of renewable energy has gradually increased, which has led to the decline of the regulation capability of the power grid. The weak controllability and volatility of renewable energy such as wind energy have caused increasing pressure on the stable operation of the power grid [1]. Wind energy has high uncertainty within one day. At the same time, owing to the decoupling of the wind turbine mechanical speed and the grid frequency, this leads to the reduction of the system inertia [2]. In terms of seasonal complementarity, the seasonal fluctuation of hydropower output is large, but the daily fluctuation is small. Compared with hydropower, the seasonal fluctuation of wind power is much smaller, but the hourly and daily fluctuations of wind power are large. Through the complementarities of wind power and hydropower, the fluctuation of wind power can be compensated. Therefore, considering the combined operation of wind power and hydropower is significantly important in the stable operation of power system. How to effectively use the complementary characteristics of wind and hydropower in frequency response time and unit output which enhance the security and stability of the power grid has attracted more and more attention.
At present, some researches have tried to adopt certain control strategies based on the operating characteristics of the wind turbines, so that the wind turbine can obtain the frequency modulation control effect similar to the traditional unit. Reference [3] proposes a control strategy of frequency modulation for wind turbines, which using the fast power control reserve of variable-speed wind turbines to actively provide reserve capacity of primary frequency modulation. This strategy can ensure the reserve capacity of PFR even if the wind speed changes in a wide range through the unloading operation of the wind turbine. Reference [4] proposed an control strategy for active power frequency for doubly fed wind turbines, which combines overspeed standby and simulated inertia. The strategy realizes simulated inertia control at the overspeed point rather than running at the maximum power tracking point, hence the wind turbine has long-term ability of frequency regulation and solves the problem of frequency secondary drop caused by general simulated inertia frequency regulation. Other studies consider establishing coordination control mechanisms among different power plants, so that different types of new energy power plants can jointly participate in frequency control. These studies have discussed the joint operation mechanism of fan units, electric vehicles [5, 6], energy storage power stations [6, 7], etc. Reference [8] has proposed a control strategy for photovoltaic power stations to monitor the fan speed deviation in real time, so as to dynamically adjust the photovoltaic output power and improve the frequency stability of the system. Based on the time-delay model of hydraulic turbine governor, reference [9] reasonably simplifies the hydraulic turbine governor system, derives the analytical solution of power grid frequency response taking into account rotating reserve and water hammer effect, and further analyzes the impact of water hammer effect on power grid frequency. Reference [10] proposed a joint frequency control strategy of wind turbine and hydraulic turbine, which excluded the interaction of frequency response of hydraulic turbine and variable-speed fan in addition to frequency deviation, so as to reduce the fluctuation interference of wind power.
This paper presents a strategy that the wind turbine and the hydraulic turbine jointly involved in the PFR. The appropriate frequency regulation reserve capacity is determined by real-time detecting the speed of the wind turbine and the hydraulic turbine. When the load increases suddenly, the wind turbine first provides the frequency regulation reserve capacity quickly, and then the hydraulic turbine provides stable power support, which not only avoids the secondary drop of frequency caused by the speed recovery of the wind turbine, but also reduces the water hammer effect of the hydraulic turbine, the stability of regional power system is improved.
2 System Model
In this paper, the output models of wind turbine and water turbine are established respectively. For wind turbine, as wind power, photovoltaic and other new energy units do not have frequency response ability under the control of maximum power point tracking (MPPT), fans which with improved self-control mode can increase the active output in a short time by releasing the rotor kinetic energy. The control strategy of kinetic energy comprise control of virtual inertia, control of droop and control of integrated inertia.
For the hydropower unit, the water hammer effect will occur when the hydropower unit participates in the primary adjustment of the grid frequency. Due to the inertia of the water flow in the penstock, the change of the water flow in the turbine lags behind the change of the guide vane opening. When the opening of the guide vane increases, the water flow tends to increase, but the water pressure decreases, so the output power of the turbine does not increase instantaneously, but first decreases temporarily and then increases, increasing the frequency modulation response time.
In the wind turbine combined operation power system, affected by the water hammer effect of the turbine, the hydropower unit lacks the ability of fast PFR within 3–5 s, and the delay time of the PFR response of the wind power are shortened to 0.5–1.0 s, which the fast frequency response resource have a high-quality. Hence, in the case of power grid frequency, wind power can participate in PFR through additional control of rotor kinetic energy. In the initial stage of system disturbance, it can give full play to its advantages of quickly suppressing frequency change rate and reducing the maximum deviation of frequency, and make up for the long delay time of PFR response in conventional hydropower and thermal power units and the inherent defects of water hammer effect of hydropower units. In the middle and late stage of disturbance, it can coordinate with the hydraulic turbine unit to avoid the secondary frequency drop owing to the fan entering speed recovery process.
2.1 Wind Turbine Model
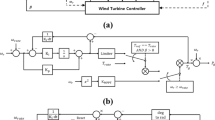
In this paper, the doubly fed wind turbine model is adopted. When studying the frequency problem, the simplified modeling of the doubly fed asynchronous fan is consist of the wind power model, shafting model and maximum power tracking curve control [11]. The fast control process of the fan converter is equivalent to the low-pass filter, and the fan model with rotor kinetic energy control, speed protection module and speed recovery module is attached as shown in Fig. 1.

Wind turbine control model
The mechanical output power of the fan \(P_m\) can be expressed as
where, \(\rho\) is the air density, R is the wind wheel radius, \(\beta\) is the pitch angle, V is the actual wind speed, \(c_1\)–\(c_8\) are the wind turbine’s parameters, \(\omega_r\) is the fan speed, and \(\lambda\) is the tip speed ratio.
In the shafting model, \(H_t\) is the sum of inertia time constants of wind turbine and wind turbine, \(P_{{\text{wn}}}\) and \(P_{{\text{we}}}\) represent the fan’s mechanical power and the fan’s electromagnetic power respectively. The unit value of output signal of maximum power tracking curve \(p_{{\text{opt}}}^*\) is expressed as:
where, \(P_{{\text{wn}}}^*\) is the unit value corresponding to the rated active power of the fan, taken as 1 pu, \(\omega_1\) is the unit value corresponding to the rated speed, taking 1.2 pu, \(\omega_{\max }\) and \(\omega_{\min }\) are the upper and lower limits of wind turbine speed constraints respectively, taking 1.21 and 0.70 pu respectively, \(k_{{\text{opt}}}\) is the maximum power tracking coefficient of the fan.
2.2 Hydraulic Turbine Model
The hydraulic turbine mathematical model in this paper is shown in Fig. 2, where the first-order inertia model of the governor part \({1 / {(1 + sT_G )}}\) is approximately equivalent to the delay model, and the action process of the guide vane and the response process of the hydraulic turbine are approximately equivalent to the pure time delay model.

Mathematical model of hydraulic turbine
Due to the inertia of the water flow in the penstock, the change of the water flow in the turbine lags after the change of the guide vane opening. When the opening of the guide vane increases, the water flow tends to increase, but the water pressure decreases, hence the wind turbine output power does not increase instantaneously, but first decreases temporarily and then increases.
According to the principle, the PFR control strategy of large hydropower units can be divided into opening control and power control. The control mode of PFR of hydropower units is determined by the feedback mode of the fan’s regulation system. Under the power control mode, the regulation objective of PFR is to change the output power of hydropower units, and convert the frequency difference of the system \(\Delta f\) into the power \(\Delta P\) that the units need to change. After the unit power corresponding to the frequency difference is determined, it has nothing to do with the operating head of the unit.
where, M is the moment of inertia of the hydraulic turbine and \(\Delta P_{\text{L}}\) is the disturbance power, \(R_{\text{T}}\) is the head drop rate, \(R_{\text{P}}\) is the permanent drop rate, D is the equivalent damping coefficient of the turbine, \(T_{\text{G}}\) is the main servo time constant, \(\varepsilon\) is the unit step function, \(T_{\text{w}}\) is the water flow time constant, \(s\) is the Laplace operator, \(H(s)\) is the influencing link of the water hammer effect of the turbine.
3 Integrated Primary Frequency Regulation Control Strategy
In this paper, the joint PFR control strategy considering the flexibility of standby is adopted. During the normal operation of the system, the wind speed and water head of the turbine are detected, and the fast frequency regulation performance and economic characteristics are comprehensively considered to maintain appropriate frequency regulation standby. Meanwhile, in case of sudden increase of system power of different sizes, coordinate and control the release of the fan’s rotor kinetic energy and the speed control of the hydraulic turbine to reduce the impact of sudden increase of power on the system frequency.
3.1 Frequency Regulation Standby Calculation
Since wind power, photovoltaic or rest of new energy units do not have frequency response capability under the control of MPPT during normal operation, only wind turbines with improved self-control mode can increase active output in a short time by releasing rotor kinetic energy. Control of rotor kinetic energy [12] solves the problem of how to make the wind turbine have frequency modulation capability.
Spinning reserve needs to be based on load forecasting, which is usually interval forecasting, and the load will fluctuate within a certain forecasting confidence interval. The difficulty of frequency modulation and reserve control is to select the appropriate power reference value \(P_{ref}\), so that when the wind speed changes in a wide range, a certain amount of active power reserve can be maintained. At the same time, it is considered to discharge as much as possible, that is, discharge as much as possible on the basis of taking into account the frequency modulation of the system. Wind turbines usually operate on the maximum power curve. When frequency support is required, there must be standby capacity, that is, when the generator is running, the active reference must be lower than the maximum power extracted by the specific wind speed. This mode is also called unload run. Since the maximum power varies with wind speed, a simple way to realize this unloading operation is to use the rated power of the wind turbine generator \(P_N\) and set the value of power reference \(P_{ref}\) as the percentage of rated power
where, \(\tau\) is the percentage of primary reserve.
The methods of fans which participating in the PFR of grid mainly include analogy droop control and inertia control. The fan’s controller calculates the reference power according to the input variables, such as turbine speed, power generation and grid connection frequency. The output power is adjusted by controlling the fan pitch angle and torque, hence the output power value is lower than the maximum available power, so as to obtain active reserve. When the frequency decreases, the pitch angle control changes to increase the power coefficient, capture more wind energy, and increase the mechanical input power, that is, increase the input power of the prime mover. Torque control can also change the power factor by changing the speed, thus releasing rotor energy for providing a backup for fast mechanical energy. Providing frequency modulation standby through the wind turbine can also increase the virtual inertia of the system, so as to increase the frequency stability. The wind turbines frequency modulation standby strategy is shown in Fig. 3.

Frequency modulation standby strategy of wind turbine
3.2 Integrated Primary Frequency Regulation Control
According to wind conditions, the fan may operate in MPPT mode, constant speed mode and constant power mode under steady-state conditions. In case of system frequency drop, the additional rotor kinetic energy control of the fan participates in the grid PFR. When the wind turbine speed is lower than the minimum speed \(\omega_{\min }\), the speed protection module will act, cut off the rotor kinetic energy control and speed recovery module, and the wind turbine will restore the maximum power tracking control, which will instantly bring negative power impact to the system which result in the secondary drop of frequency. The fan electromagnetic power \(P_{{\text{we}}}\) will first decrease and then increase after the speed recovery module is started. Therefore, the fan will inevitably have a secondary impact on the system frequency during the speed recovery process. Therefore, this paper uses hydraulic turbine to compensate for the negative frequency impact of fan power recovery on the system.
After the rapid power regulation of the fan, the turbine will provide stable frequency modulation power support within a few seconds after the disturbance. Similar to the virtual inertia control of wind turbine, this paper adopts the frequency control method of turbine induced guide vane opening. The load command is directly sent by the monitoring system to execute the guide vane opening. In the opening control mode, the load command is modulated by the monitoring system through the pulse width, and the guide vane opening is executed after the integration by the governor. The dynamic process of the unit power is faster than the dynamic process of the unit power under the opening control mode.
Based on the traditional primary frequency modulation (PFM) control method, this paper establishes an optimal configuration model of rotating reserve, which takes into account the dynamic and steady-state characteristics of PFM. Through real-time detection of wind speed and turbine speed, the appropriate frequency modulation reserve capacity is determined. In case of sudden load increase, the wind turbine first provides fast frequency modulation reserve capacity, and then the turbine provides stable power support, avoiding the secondary drop of frequency caused by the recovery of wind turbine speed, reducing the water hammer effect of the turbine and improving the stability of the regional power system. The overall control framework is shown in Fig. 4. The mathematical expression is:

PFM control strategy for joint participation of wind turbine and hydraulic turbine
4 Simulation Results
Owing to verify the feasibility and effectiveness of the primary frequency modulation control strategy proposed in this paper, a 5-machine 3-zone simulation model is built according to Matlab/Simulink simulation environment. The simulation model is used to study the dynamic simulation of the whole process of PFR of fan turbine under the condition of grid frequency disturbance. In the calculation example, the wind speed is set as 8 m/s, the rated frequency of the system is 50 Hz, and the inertia of the fan rotor \(J_{DFIG} = 6.63 \times 10^6\) kg·m3.
Based on the low load operation mode of the power grid, this example data analyzes the control results under different sudden load increases in the hydropower high proportion system. In the small load operation of the grid, the startup capacity of the conventional synchronous unit is 2500 MW, the startup capacity of the wind power is 900 MW, and the maximum credible accident load rejection of a single machine under the system frequency is 75 MW.
4.1 Simulation Resultst Under Maximum Credible Load Shedding Accident
In case of sudden increase of 0.08 pu power in the system, the simulation results of the water turbine participating in the PFR control process alone are shown in Fig. 5, while the simulation results of the output process of the fan and the water turbine participating in the PFR control jointly are shown in Fig. 6.

Hydraulic turbine unit participating in frequency modulation alone

Wind turbine and hydraulic turbine participate in frequency modulation at the same time
Compared with Fig. 5 and Fig. 6, it can be seen that when the turbine participates in frequency modulation standby alone, the frequency fluctuation of the system is large after the sudden drop of 0.08 pu power in the maximum credible accident. The turbine generates the highest active power of 0.12 pu within 10 s and gradually attenuates to 0.08 pu. Finally, the frequency of the system is stabilized at 49.89 Hz, and the PFR process is completed. In terms of system frequency stability characteristics, when only hydropower units participate in frequency regulation, there is a frequency steady-state error of 0.11 Hz after the system frequency is stabilized. In terms of dynamic characteristics of system frequency, when wind power does not participate in frequency modulation and only hydropower units participate in frequency modulation, the sudden increase of load and the impact of water hammer effect of hydropower units make the system frequency drop to 49.62 Hz for a time under the scenario set. It can be seen that when the load increases suddenly, the output of the hydraulic turbine unit tends to decrease first and then increase, and gradually stabilizes to a fixed value. This is caused by the water hammer effect of the hydraulic turbine unit. Due to the inertia of the water flow in the penstock, the change of the water flow of the hydraulic turbine lags behind the change of the guide vane opening.
After the virtual inertia control of wind power is used in the system, the maximum frequency deviation of the system has been significantly improved. Compared with the independent participation of turbine frequency regulation standby in frequency regulation, the system frequency drop after the participation of wind turbine in frequency regulation is less, with a minimum of 49.78 Hz. When the fans and water turbine participate in the frequency modulation standby at the same time, the frequency fluctuation of the system is small after the sudden power drop. There is no change in the active power generated by the turbine. The fan generates 0.03 pu of active power within 5 s and gradually attenuates to 0. Compared with the turbine participating in frequency modulation standby alone, the frequency of the system is always maintained above 49.7 Hz. The speed of the system to achieve frequency stability is also faster. After the wind power uses virtual inertia control to participate in frequency modulation standby, compared with the turbine frequency modulation standby participating in frequency modulation alone, the system frequency enters the steady state after 16 s after the load disturbance, and the frequency adjustment time is reduced by 60%.
It is shown in Fig. 6 when the control of virtual inertia of the wind turbine is used, the time for the wind turbine to provide power support is short, and the wind turbine starts to absorb electromagnetism after 8 s of disturbance. Finally, the wind turbine electromagnetic power increment in the steady state is 0. This is because the rotor speed recovers after the wind turbine deviates from the maximum power point to provide standby capacity, which may lead to a second fall of the grid frequency. After using the method in this paper, wind turbine and water turbine can effectively complement each other to provide stable and continuous active support and avoid the secondary drop of system frequency.
4.2 Control Effect Under Different Accident Conditions
For the purpose of comparing the impact of different accidents on the wind water complementary participation in frequency modulation standby proposed in this paper, this paper simulates and analyzes the operation of the system when 0.05 pu and 0.12 pu power surge occurs. Other parameters remain unchanged. The model established in this paper is used. The simulation results are shown in Fig. 7 and Fig. 8.

Load shedding accident of 0.06 pu

Load shedding accident of 0.12 pu
In the case of small accidents in the system, such as when the load rejection of a single machine is 0.06 pu, the frequency drop of the system is small whether the turbine participates in frequency modulation alone or the fan turbine participates in frequency modulation jointly. In extreme cases of the system, such as 0.12 pu drop, a greater frequency drop occurs when the hydraulic turbine unit participates in frequency modulation alone, with the minimum frequency of 49.26 Hz, and the system needs a longer time to stabilize, and the system frequency is finally stabilized at 49.75 Hz.
Through the simulation of accidents with different severity, it can be found that when the severity of the accident is small, the dynamic characteristics of the system frequency are good, and the minimum frequency difference between the two control methods is small, but the joint frequency regulation of wind turbine and water turbine can speed up the recovery of the system stability. In the case of a larger sudden increase in the active load of the system, although the frequency of the system at the time of final stability is the same, the fan and turbine participating in the frequency regulation standby at the same time can reduce the amplitude of the system frequency drop. Compared with the turbine participating in the frequency regulation alone, the lowest frequency of the system has been improved, and the system stability speed is faster.
4.3 Control Effect Under Different Wind Power Permeability
In order to investigate the applicability of the dynamic primary frequency modulation control strategy proposed in this paper at different wind power permeability levels, based on the above simulation conditions, the wind power and turbine unit capacity are replaced in equal proportion to change the wind power permeability in the region. When the regional stroke electric permeability is 20%, 30% and 40% respectively, the maximum frequency drop change and the frequency deviation after reaching stability within the PFR time of the system are shown in Table 1.
It can be seen from the results in Table 1 that when the wind power permeability in the system increases gradually, the maximum frequency drop of the system decreases after the introduction of the dynamic primary frequency modulation control strategy, because the fan can quickly provide power support. However, due to the increase of wind power permeability, the number of units providing stable power support decreases, making the final frequency deviation of the system increase.
5 Conclusion
Considering the water hammer phenomenon of the hydraulic turbine, this paper proposes a primary frequency modulation control method that senses the change of the hydraulic turbine guide vane and combines the wind power virtual inertia control. Using this control method, after the system load is disturbed, the wind turbine can provide fast standby power, and then the hydraulic turbine can provide stable power support. Based on the proposed primary frequency modulation control method, an optimal configuration model of rotating reserve is established, which takes into account the dynamic and steady-state characteristics of optimal frequency modulation. Through real-time detection of wind speed and turbine speed to determine the appropriate frequency modulation reserve capacity, in case of sudden load increase, the wind turbine first provides fast frequency modulation reserve capacity, and then the turbine provides stable power support, avoiding the secondary frequency drop caused by the wind turbine speed recovery, reducing the water hammer effect of the turbine, and improving the stability of the regional power system. The conclusions of this paper are as follows:
-
1)
Through numerical examples and simulation verification, the control method and rotating reserve configuration method proposed in this paper can enable the system to provide primary frequency modulation fast reserve capacity by using the fast power control capability of variable speed wind turbine generator at the initial stage of system disturbance, and give full play to its advantages of quickly suppressing the frequency change rate and reducing the maximum frequency deviation.
-
2)
The results of the example show that the frequency adjustment time can be shortened, the maximum fall of the grid frequency can be reduced, the mechanical power drop caused by the water hammer effect of the hydropower unit can be reduced, and the inherent defects of the long delay time of the PFR response of the conventional hydropower and thermal power units and the water hammer effect of the hydropower unit can be made up, Recover the frequency to the rated frequency within seconds after load disturbance.
-
3)
In the middle and late stage of disturbance, it can coordinate with the hydraulic turbine unit. The method which proposed in this paper also has a good inhibition effect on the second frequency drop result in the fan entering the speed recovery process, and reduces the maximum frequency drop and response time of the system. The comparative simulation under different load sudden increments verifies that this method has a good applicability.
References
Wu, J., Xue, Y., Shu, Y.: Adequacy optimization for a large-scale renewable energy integrated power system: part one spinning-grade reserve optimization. Autom. Electr. Power Syst. 43(8), 101–109 (2019)
Tielens, P., Van Hertem, D.: The relevance of inertia in power systems renew. Sustain. Energy Rev. 55, 999–1009 (2016)
Xue, Y., Tai, N., Song, K.: Variable-speed wind turbines provide primary reserve for frequency control. Power Automation Equipment 22(08), 75–80 (2010)
Ding, L., Yin, S., Wang, T.: Integrated frequency control strategy of DFIGs based on virtual inertia and over-speed control. Power Syst. Technol. 09, 2385–2391 (2015)
Arani, M.F.M., Mohamed, Y.A.-R.I.: Cooperative control of wind power generator and electric vehicles for microgrid primary frequency regulation. IEEE Trans. Smart Grid 9(6), 5677–5686 (2018)
Vahedipour-Dahraie, M., Rashidizaheh-Kermani, H., Najafi, H.R., et al.: Coordination of EVs participation for load frequency control in isolated microgrids. Appl. Sci. 7(6), 539 (2017)
Uehara, A., Senjyu, T., Yona, A., et al.: Frequency Control by Coordination Control of WTG and Battery Using Load Estimation. Taipei, Taiwan (2009)
Fernandez-Guillamon, A., Martínez-Lucas, G., Molina-García, Á., et al.: Hybrid wind-PV frequency control strategy under variable weather conditions in isolated power systems. Sustainability 1–25 (2020)
Rao, C., Guo, C., Ma, N.: Analytical method of power grid frequency change considering water hammer effect of turbine. Power Syst. Technol. 42(6) (2018)
Zou, J., Pipattanasomporn, M., Rahman, S., et al.: A frequency regulation framework for hydro plants to mitigate wind penetration challenges. IEEE Trans. Sustain. Energy 7(4), 1583–1591 (2016)
Qiao, Y., Guo, X., Lu, Z., et al.: Parametersetting of auxiliary frequency regulation of wind turbines considering secondary frequency drop. Power Syst. Technol. 44(3), 807–815 (2020)
Li, S., Qin, S., Wang, R., et al.: A collaborative control of primary frequency regulation for DFIG-WT. Acta Energ. Sol. Sin. 41(2), 101–109 (2020)
Acknowledgments
This research is supported by the Science and Technology Project of Anhui Electric Power Co., Ltd. Under Grant 5212D02001XN.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 Beijing Paike Culture Commu. Co., Ltd.
About this paper

Cite this paper
Gui, Q., Zhong, C., Jiang, Q., Liu, J., Wang, J., Li, Z. (2023). Integrated Control Strategy for Wind Turbine and Hydraulic Turbine in Primary Frequency Regulation. In: Li, J., Xie, K., Hu, J., Yang, Q. (eds) The Proceedings of the 17th Annual Conference of China Electrotechnical Society. ACCES 2022. Lecture Notes in Electrical Engineering, vol 1013. Springer, Singapore. https://doi.org/10.1007/978-981-99-0451-8_15
Download citation
DOI: https://doi.org/10.1007/978-981-99-0451-8_15
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-0450-1
Online ISBN: 978-981-99-0451-8
eBook Packages: EngineeringEngineering (R0)