
Abstract
An efficient and safe landing procedure for an aircraft holds significance across economic, operational, and strategic considerations. Achieving the shortest possible landing distance without skidding necessitates a variable braking force that consistently matches the friction force. Thus, the control strategy of the Anti-skid Braking System (ABS) must encompass the ability to address pronounced nonlinearity and substantial unpredictable disturbances, while also regulating the wheel slip ratio to ensure a stable braking process. This study introduces the application of the Active Disturbance Rejection Control Technique to the anti-skid braking system. The proposed control algorithm guarantees that the closed-loop system operates within the vicinity of the peak point of the stable region on the friction curve. This optimization significantly enhances both braking performance and overall safety.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The aircraft braking process involves several nonlinear dynamic characteristics, including Nonlinear Friction Characteristics, Brake Thermal Effects, and Nonlinearity in the Hydraulic System. As a result, the Anti-Skid Braking System (ABS) holds a critical role in the aircraft landing system. ABS significantly enhances aircraft safety, particularly in demanding scenarios, by optimizing the longitudinal tire-road friction to ensure maximum traction while maintaining manageable lateral forces for effective steerability. A significant challenge in ABS design is the formulation of control strategies that exhibit robustness against two major sources of uncertainty influencing braking dynamics: the inherently nonlinear tire-road friction forces and the dynamic load [1].
In recent times, considerable research endeavors have been directed towards fine-tuning slip ratio settings and regulating reference deceleration rates to achieve precise tracking [2]. Nonetheless, inherent complexities like intricate nonlinearity and potent stochastic disturbances have presented obstacles in the development of ABS designs.
In addressing the aforementioned nonlinearity and uncertainties, this study employs the Active Disturbance Rejection Control Technique, as introduced by Han [3]. The application of this technique culminates in the development of an Active Disturbance Rejection Controller (ADRC) tailored for aircraft anti-skid braking systems. The efficacy of the ADRC is then evaluated through simulations conducted on a semi-physical simulation platform, using a simulator representative of a specific aircraft model.
2 System Description
To ascertain the efficacy of the anti-skid braking approach, a meticulous aircraft model has been employed in the simulation procedure. This encompassing model integrates both the aircraft's aerodynamics and a coupled wheel model. Furthermore, it integrates a ground-contact friction model designed to accommodate hybrid runway surfaces.
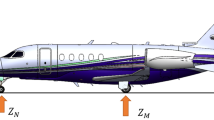
Under such assumptions, the dynamic model of aircraft can be described by Eq. 1, 2 and 3, and the interaction of forces are shown in Fig. 1.
The rotational velocity of a single main wheel is described as follows:
where ω represents the angular velocity of the wheel, J stands for the wheel's inertia, r is the radius of the wheel, \({B}_{\omega }\) denotes the drag torque coefficient, and \({T}_{b}\) signifies the brake torque generated by the actuator [4].

Aircraft landing roll force
2.1 Tire-Road Contact Friction Model
Tyres are arguably the primary components that significantly influence the dynamic behavior and performance of the aircraft landing process. Notably, tyres facilitate contact between the rigid hub of the wheel and the road surface, allowing this interaction to occur across all types of surfaces and under various road conditions. Furthermore, the tyre plays a critical role in maintaining road grip, ensuring adherence to the road surface. It also takes on the responsibility of transferring the vertical load F_z to the ground, which is then decomposed at the contact point on the road plane into longitudinal force F_x (i.e., traction and braking) (Fig. 2).

Single wheel force analysis
In this study, we make the assumption that the aircraft can effectively maintain its intended heading using the steering system while taxiing under asymmetric loads. These loads encompass scenarios like crosswind landings, bursting of a single main wheel, and brake failure in one main wheel. Moreover, the aircraft is considered symmetric during the braking process. It's important to note that this simplification will not have any impact on the design of the upcoming control algorithms.
Building upon the Pacejka model, the longitudinal coefficient takes on the following form [5]:
Table 1 presents the parameters of the friction model for various runway surfaces. The μ-λ curves depicting the relationship between the friction coefficient and wheel slip ratio are displayed in Fig. 3.

Relationship between \(\mu \) and \(\lambda \)
2.2 Overall Aircraft Landing Systems
Substitute Eqs. (4) and (5) into Eqs. (1) and (2):
where:
Taking the time derivative of Eq. (4), we get:
Substituting Eq. (6) and Eq. (7) into Eq. (9) yields:
where:
3 System Description
The primary objective of this study is to formulate a control law in the format of a dynamic update law. This law is designed to achieve robust stabilization of the system around the intended equilibrium point, employing the Lyapunov sense to account for uncertainties inherent in the function \({F}_{z}*\mu (\lambda )\).
3.1 Problem Formulation
Based on the assumption that the aircraft speed v is treated as a slowly varying parameter, and expressing v as v = ωr / (1 - λ), the system dynamics can be expressed as follows:
where ω ≥ 0 and:
When the condition in (9) holds, and the control input is constant, i.e., \({{\text{T}}}_{b}= {T}_{b}^{ss}\) the system's equilibrium points are as follows (refer to Fig. 4):
-
(1)
If \({T}_{b}^{ss}>max \lambda \psi (\lambda )\), then the unique equilibrium point is \({\lambda }_{1}^{ss}=1\)
-
(2)
If \({T}_{b}^{ss}<max \lambda \psi \left(\lambda \right)\), the system can have at most three equilibria: \({\lambda }_{1}^{ss}=1\), \({\lambda }_{2}^{ss}={\lambda }_{2}\), and \({\lambda }_{3}^{ss}={\lambda }_{3}\), where \({\lambda }_{2}<{\lambda }_{3}\) represent the two potentially coinciding solutions of \({T}_{b}^{ss}=\psi (\lambda )\), as depicted in Fig. 4.

Equilibrium points for anti-skid braking system
To facilitate the analysis of system dynamics considering the braking action, and specifically to address the braking torque dynamics for the actuator, we assume the following in this section:
Given u = {-k, 0, k}, the link between wheel dynamics and hydraulic actuator dynamics leads to a second-order system:
3.2 Active Disturbance Rejection Controller for Aircraft Anti-Skid Braking System
The design of automatic braking control systems is significantly influenced by the characteristics of the braking system and the performance of the actuators. It's evident that control objectives must be balanced against the capabilities of the braking system. Therefore, the primary goal of the control system is to sustain the wheel slip ratio within acceptable ranges, thereby preventing wheel lockup [6]. To address this challenge, this study introduces the design of an Active Disturbance Rejection Controller (Fig. 5).

The structure of ADRC
The comprehensive Active Disturbance Rejection Controller (ADRC) algorithm, equipped with disturbance compensation capabilities, is outlined as follows:
-
1.
Based on the input v, initiate the transient process arrangement:
$$ \left\{ {\begin{array}{*{20}l} {\text{e = v}_{\text{1}} \text{ - v}} \hfill \\ {\text{fh} = \text{fhan}\left( {{\text{e}},{\text{v}}_{2} ,{\text{r}}_{0} ,{\text{h}}} \right)} \hfill \\ {{\text{v}}_{1} = {\text{v}}_{1} + \text{h}{\text{v}}_{2} } \hfill \\ {{\text{v}}_{2} = {\text{v}}_{2} + \text{hfh}} \hfill \\ \end{array} } \right. $$(16) -
2.
Track and estimate the states and disturbances of the system using the output y and input u:
$$ \left\{ {\begin{array}{*{20}l} {\text{e} = {\text{z}}_{1} - \text{y} } \hfill \\ {\text{fe = fal}\left( {{\text{e}},0.5,{\updelta }} \right)} \hfill \\ {{\text{fe}}_{1} = \text{fal}\left( {{\text{e}},0.25,{\updelta }} \right)} \hfill \\ {{\text{z}}_{1} = {\text{z}}_{1} + \text{h}\left( {{\text{z}}_{2} - {\upbeta }_{01} {\text{e}}} \right)} \hfill \\ {{\text{z}}_{2} = {\text{z}}_{2} + \text{h}\left( {{\text{z}}_{3} - {\upbeta }_{02} \text{fe} + {\text{b}}_{0} \text{u}} \right)} \hfill \\ {{\text{z}}_{3} = {\text{z}}_{3} + \text{h}\left( { - {\upbeta }_{03} {\text{fe}}_{1} } \right)} \hfill \\ \end{array} } \right. $$(17) -
3.
Nonlinear State Error Feedback:
$$ \left\{ {\begin{array}{*{20}l} {{\text{e}}_{1} = {\text{v}}_{1} - {\text{z}}_{1} } \hfill \\ {{\text{e}}_{2} = {\text{v}}_{2} - {\text{z}}_{2} } \hfill \\ {{\text{u}}_{0} = \text{k}\left( {{\text{e}}_{1} ,{\text{e}}_{2} ,\text{p}} \right)} \hfill \\ \end{array} } \right. $$(18) -
.
The Disturbance Compensation Process:
$${\text{u}}={{\text{u}}}_{0}-\frac{{{\text{z}}}_{3}({\text{t}})}{{{\text{b}}}_{0}}$$(19)
4 Simulation Results on Semi-physical Simulation Platform
Inertial test beds serve as the primary platform for verifying the wheel braking performance, and are considered an essential pre-installation validation method for aircraft braking control systems [7]. This testing approach effectively reflects the key nonlinear characteristics during aircraft braking, albeit with its complex equipment, high costs, and extended testing duration. As such, it is better suited for deterministic validation during the later stages of brake control design.
Computer simulation testing, characterized by its low cost and short testing cycle, is widely adopted for the preliminary design of aircraft brake control laws. However, due to the inherent strong nonlinearity of aircraft braking systems and the intricate nature of runway and airport environments during braking, complex models are often simplified during the aircraft braking system modeling process [8]. This inevitably affects the credibility of simulation results.
Recognizing the limitations of both inertial test beds and digital simulation, semi-physical simulation technology has emerged as a valuable alternative. Also known as semi-realistic simulation, this approach replaces challenging-to-model components with physical elements, effectively enhancing the credibility of simulation experiments.
To rigorously validate the stability properties of ADRC while considering the precise behavior of the actuator, we proceed by implementing the identical controller on a semi-physical platform (Fig. 6). Results are showcased through semi-physical simulations of landing runs involving a light aircraft.
The design of the Anti-Lock Braking System (ABS) is framed as a tracking problem with constraints. The goal is to ensure that the ABS remains within a stable region while tracking the optimal wheel slip ratio \({\lambda }^{*}\)[9]. Throughout the simulation, the following parameters are assumed to be measured by sensors: aircraft speed, wheel angular speed, and hydraulic system's braking torque. Furthermore, the initial velocity conditions are set as \({V}_{x}\left(0\right)=72\, {\text{m}}/{\text{s}}\) and ω(0) = 180 rad/s, resulting in λ(0) = 0. The simulations are carried out from the start of braking until the wheel and aircraft velocity are nearly zero, extending to the point where the aircraft's taxiing velocity reaches around 7 m/s. In order to assess the effectiveness and robustness of the Active Disturbance Rejection Controller (ADRC), a series of simulations have been conducted (Fig. 7).

Semi-physical Simulation Platform

Semi-Physical Simulation Platform Architecture Diagram
Currently, the velocity-rate-controlled and pressure-bias-modulated (PBM) control algorithm stands as the most extensively utilized algorithm in aircraft anti-skid braking systems worldwide [10]. To delve deeper into the performance evaluation of the Active Disturbance Rejection Controller (ADRC), a comparative experiment is conducted between ADRC and PBM [11]. This investigation is carried out on a hybrid runway that transitions from a dry surface to a wet one at 10 s, followed by a switch to icy conditions at 20 s. The subsequent simulation results are presented below.

Wheel Speed and Aircraft Velocity Curves of PBM and ADRC on Hybrid Runway
Figure 8 present the velocity curves of the braking process under the control of the PBM controller and the ADRC controller on the hybrid runway. In contrast to the significant fluctuations in wheel speed observed with the PBM controller during runway transitions, the entire braking process under the ADRC control remains relatively stable without pronounced skidding. This underscores the ADRC controller's strong adaptability to changes in runway conditions, effectively enhancing the safety of aircraft braking in complex runway scenarios. The ADRC hybrid runway braking time of 28 s is 6.67% shorter than that of the PBM controller, indicating that ADRC, through real-time adjustment of the anti-skid controller parameters, can efficiently utilize the tire-road adhesion, enhance braking efficiency, and improve the safety and stability of the system.

Slip Rate Curves of PBM and ADRC on Hybrid Runway
Figure 9 depict the slip ratio of the braking process under the control of the PBM controller and the ADRC controller on the hybrid runway. Due to the relatively complex nature of the hybrid runway and the presence of multiple factors, the efficiency of both controllers experiences a decline compared to a single-type runway scenario. However, in contrast to the significant slip ratio fluctuations observed under the PBM controller's control, the slip ratio under the ADRC control exhibits smaller fluctuations, remaining within an optimal range. This allows for better utilization of the friction force the tire and the road surface, consequently enhancing braking efficiency.

Adhension Coefficient Curves of PBM and ADRC on Hybrid Runway
Figure 10 illustrate the displacement curves of the servo valve's spool under the control of the PBM controller and the ADRC controller on the hybrid runway. Due to the relatively complex nature of the hybrid runway and the presence of multiple factors, the entire braking process under the control of the PBM controller exhibits intense vibrations in the servo valve's spool component, resulting in significant fluctuations. In contrast, under the designed ADRC control, the overall fluctuations are relatively smoother, with more pronounced vibrations occurring only during runway transitions (at 10s and 20s). This is because the hybrid runway introduces more interference factors, causing the overall fluctuation amplitude and frequency of the spool component to be higher than in the case of a single-type runway. However, compared to the traditional PBM controller, ADRC still demonstrates effective vibration suppression.

Braking Distance Curves of PBM and ADRC on Hybrid Runway
Figure 11 depicts a comparison of braking distances between the two controllers on a hybrid runway. It is evident that, in comparison to the traditional PBM controller, the ADRC controller is capable of significantly reducing braking time and distance. This improvement leads to enhanced overall braking efficiency, consequently increasing the safety of aircraft braking on hybrid runways.
5 Discussion
In this paper, addressing the limitations of numerical simulation and inertia platform testing methods, a semi-physical simulation model for aircraft anti-skid braking was constructed. Based on this semi-physical platform, a semi-physical experiment for anti-skid braking was designed. The ADRC algorithm designed in Sect. 3, featuring hydraulic system vibration constraints, was compared for performance against the widely used PBM control algorithm currently in operation.
The experimental results demonstrate that ADRC controller effectively reduces the vibration amplitude of the hydraulic servo system's vulnerable components without compromising braking efficiency. This indicates a favorable vibration suppression effect, showcasing the potential of the controller in practical applications.
References
Johansen, T.A., Petersen, J., Kalkkuhl, J., Ludemann, J.: Gain-scheduled wheel slip control in automotive brake systems. IEEE Trans. Control Syst. Technol. 11(6), 799–811 (2003)
Tanelli, M., Astolfi, A., Savaresi, S.M.: Robust nonlinear output feedback control for brake by wire control systems. Automatica 44, 1078–1087 (2008)
Qiu, Y., Liang, X., Dai, Z.: Backstepping dynamic surface control for an anti-skid braking system. Control. Eng. Pract. 42, 140–152 (2015)
Han, J.: Active disturbance rejection controller and its application. Control Decis. 13(1), 19–23 (1998)
Pacejka,H.B.: Tyre and vehicle dynamics . buttherworth-heinemann, Oxford. B Samadi, R Kazemi . Real-time Estimation of Vehicle Stateand Tire Road Frietion Forees. In: Proeeedings of the American Control Conferenee, vol. 5, pp. 3318–3323 (2002)
Xie, H.: Absolute Stability Theory and Application. Science Press, Beijing, pp.100–182 (1986)
Atherton, D.P.: Stability of Nonlinear System. Research Studies Press, N.Y (1981)
Feng, B., Fei, S.: Nonlinear Control System Analysis and Design, pp. 42–45. Southeast University Press, Nanjing (1990)
Wu, D., Chen, K.: Frequency-domain analysis of nonlinear active disturbance rejection control via the describing function method. IEEE Trans. Ind. Electron. 60(9), 3906–3914 (2013)
Wu, D., Chen, K.: Limit cycle analysis of active disturbance rejection control system with two nonlinearities. ISA Trans. 53(4), 947–954 (2014)
Guo, B., Zhao, Z.: On convergence of nonlinear active disturbance rejection for SISO systems. In: 24th Chinese Control and Decision Conference, vol. 2012 (2012)
Guo, B., Zhao, Z.:On Convergence of the nonlinear active disturbance rejection control for mimo systems. SIAM J. Control Optim. 52(2), 1727–1757 (2013)
Wan, H.: Absolute stability analysis of active disturbance rejection controller. J. Shanghai Univ. Electr. Power 27(5), 507–511 (2011)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Yu, F., Zou, J., Chen, X., Lin, Y., Yu, F. (2024). Aircraft Anti-Skid Braking Nonlinear Control Based on ADRC. In: Jing, X., Ding, H., Ji, J., Yurchenko, D. (eds) Advances in Applied Nonlinear Dynamics, Vibration, and Control – 2023. ICANDVC 2023. Lecture Notes in Electrical Engineering, vol 1152. Springer, Singapore. https://doi.org/10.1007/978-981-97-0554-2_64
Download citation
DOI: https://doi.org/10.1007/978-981-97-0554-2_64
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-97-0553-5
Online ISBN: 978-981-97-0554-2
eBook Packages: EngineeringEngineering (R0)