
Abstract
Unmanned aerial vehicle (UAV) photogrammetry one of the most popular photogrammetry technique due to short period of time for data acquisition and low costs compared to the use of classical manned aircrafts. This technique widely been used in many kind of application that related to aerial mapping. This paper review the UAV photogrammetry used for aerial mapping applications. The previous results by others researchers showed the capability of the UAV photogrammetry captures the complex shape and topography. The application for the image processing uses a sequence of 2-dimensional (2D) images to recreate a scene and built it in 3-dimensional (3D) model. The study will utilize the software for 3D models reconstruction which are open source tools and commercial software packages. The study also describe the brief idea to enchance the uses of the UAV photogrammetry in research. End user will have ideas using of the software for photogrammetry.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Unmanned aerial vehicles (UAV) or commonly known as drones were initially invented for military purposed, then the uses of drone with additional functional by adding camera, the drone can be used for surveying high level areas or dangerous area (Madawalagama et al. 2016; Ajayi et al. 2018). The creation of structure from motion based method for digital photogrammetry from multiple converging images resulting to an outburst of 3D terrain reconstructions in high resolution (Dering et al. 2019). The UAV systems equipped with photogrammetric cameras have shown enough accuracy for many applications in civil engineering (Díaz-Vilariño et al. 2016). The advantages of UAVs are it require lesser time compared to other techniques for data acquisition and minimize the cost (Aber et al. 2010; Agüera-Vega et al. 2018). From the previoues study shows that, UAV photogrammetry is more accurate than Terrestrial Laser Scanning (TLS) when used in terrain mapping (Gruszczyński et al. 2017). Through the leveraging state of the art methodologies, the research mentioned in (Pierdicca 2018) paper shows how a precise reality-based model (compatible for documentation purposes) can be achieved with a robust pipeline, also beginning from unplanned acquisition and rough data sets. UAV photogrammetry monitoring of 3D areal displacements was revealed in (Kemal Özgür Hastaoğlu 2019) study.
The previous study has shown that to produce highly accurate reconstructions and models of land shapes and historic landscape structures, UAV technology can be used as a well-organized and dependable tool. This showed that it is necessary to use of high-resolution UAV-based data for the evaluation of the authentic storage capacity of historical landscape structures, that is essential information for the future application in water management and flood mitigation plans. Besides that, although the UAV imaging is a relatively low-cost technology, it is powerful enough to generate 3D models. The exactness obtained is compared to that obtainable from land survey approaches, Manned Aerial Vehicles and LiDAR data, all of which are more costly. It has been shown in (B. Kršák, 2016) that the surface model generated using a photogrammetric approach using low-cost UAV and low-cost cameras meets the desired accuracy requirements and can generally be considered as a convenient tool for data collection in surface mines. Thus, the objective of this paper is to review the application of UAV photogrammetry used for aerial mapping applications.
2 Reconstructed Point Cloud
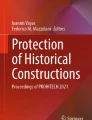
Rather than using geo-referencing, UAV photogrammetry use the Ground Control Points (GCP) into a reconstructed point cloud based on UAV, or the camera exposure stations is used based on Real-Time Kinematic (RTK), for direct geo-referencing method. The studies carried out to compare these approaches show that the GCP measurements produce more reliable results in 3D positioning (Stöcker et al. 2017; Forlani et al. 2018; Rabah et al. 2018). In accordance with the same flight plan in the study of (Forlani et al. 2018), four different flights were conducted for each RTK mode over a field trial. Three block control configurations were used to produce the Digital Surface Model: GCP only, camera stations only, camera stations and one GCP. From the result, the first and third configurations offer the greatest accuracy in 3D positioning irrespective of the RTK mode. Moreover, (Stöcker et al. 2017) has reported that thorough investigations of the external orientation variables show that the addition of four GCPs will minimize systemic sensor misalignments and offsets of the image block. On this matter, the application of post-processing cinematic corrections decreases time-consuming field work to estimate the high quantities of GCPs and makes extensive scale UAV mapping a more practicable solution for cm-level practitioners. The research by (Rabah et al. 2018) showed that classical Aerial Triangulation is more reliable than the DG of UAV imagery. These researches show that while drones with on-board receivers capable of positioning RTK are being used, only few GCPs are needed to achieve more precise performance in 3D positions. Furthermore, the study by (Díaz-Vilariño et al. 2016) also show that the similarity of photogrammetry vs LiDAR as shown in Fig. 1.

Digital elevation model (DEM) with resolution of 1 m per pixel from (a) LiDAR and (b) photogrammetric system.
The overpriced cost associated with aircraft use and the consumption of time nature makes this strategy an unsuitable solution, particularly for small scale analysis (Al-Rawabdeh et al. 2016). Photogrammetry will create 3D and 2D full-colour terrain models in the different light spectrum that are easier to view. The key outputs of the photogrammetric surveys were raw photographs, ortho photograms, Virtual Surface Models and 3D point clouds created from the stitching and processing of hundreds or thousands of images (Agüera-Vega et al. 2018). Therefore, it is an optional method compare to Light Detection and Ranging (LiDAR), which is expensive but dominant in mid-air, to obtain high-resolution virtual surface models.
3 Method for Image Processing in Photogrammetry
End user will choose the software by of it graphical user interface, friendly user and easy to learn. In addition, basic of photogrammetric triangulation feature where it can process various types of imagery e.g. aerial & close range which also provides easy auto calibration. Software can create dense point clouds where its points classification to customize geometry reconstruction and elaborate model editing for accurate results. The final feature will be the generation and texturing of 3D model that creates photorealistic textures. The ambition is to unravel the figure in a compact image descriptor, which allows computing the gap between all images descriptors effectively. All the features is to match between candidate image pairs and continued to structure from motion where the input images, and infer the rigid scene structure (3D points) that provides the geometric relationship behind all pose observations (position and orientation) and internal configuration of all cameras. After that, depth map estimation is done and then followed by mesh where it creates a scene representing a dense geometric surface. After meshing there is texturing, then ended by localization based on the SFM results. Table 1 listed the method for image processing in UAV photogrammetry.
4 Conclusion
It is very important for the method to produce accurate and consistent data in order to plan the measurements and to select ground sampling distance values according to the expected quantities of displacement. Parameters such as expanding the amount of deformation plates, reducing flight speed and altitude, and using a high-resolution camera would then enable smaller displacement quantities to be determined. With regard to the accuracy of the generated model, it is proven, due to the concept of digital photogrammetry and aerial imagery software processing, these models are much more precise compared to models created only from terrestrially determined detailed point.
References
Aber, J.S., Marzolff, I., Ries, J.B.: Platforms for Small-Format Aerial Photography. Small-Format Aer. Photogr. 91–118 (2010) https://doi.org/10.1016/b978-0-444-53260-2.10008-0
Agüera-Vega, F., Carvajal-Ramírez, F., Martínez-Carricondo, P., et al.: Reconstruction of extreme topography from UAV structure from motion photogrammetry. Meas. J. Int. Meas. Confed. 121, 127–138 (2018). https://doi.org/10.1016/j.measurement.2018.02.062
Ajayi, O.G., Palmer, M., Salubi, A.A.: Modelling farmland topography for suitable site selection of dam construction using unmanned aerial vehicle (UAV) photogrammetry. Remote Sens. Appl. Soc. Environ. 11, 220–230 (2018). https://doi.org/10.1016/j.rsase.2018.07.007
Al-Rawabdeh, A., He, F., Moussa, A., et al.: Using an unmanned aerial vehicle-based digital imaging system to derive a 3D point cloud for landslide scarp recognition. Remote Sens. 8, 95 (2016). https://doi.org/10.3390/rs8020095
Kršák, P.B.: Use of low-cost UAV photogrammetry to analyze the accuracy. Measurement 97, 276–287 (2016)
Cui, H., Shen, S., Gao, W., et al.: Efficient and robust large-scale structure-from-motion via track selection and camera prioritization. ISPRS J. Photogramm. Remote Sens. 156, 202–214 (2019). https://doi.org/10.1016/j.isprsjprs.2019.08.005
Dering, G.M., Micklethwaite, S., Thiele, S.T., et al.: Review of drones, photogrammetry and emerging sensor technology for the study of dykes: Best practises and future potential. J. Volcanol. Geotherm. Res. 373, 148–166 (2019). https://doi.org/10.1016/j.jvolgeores.2019.01.018
Díaz-Vilariño, L., González-Jorge, H., Martínez-Sánchez, J., et al.: Determining the limits of unmanned aerial photogrammetry for the evaluation of road runoff. Meas. J. Int. Meas. Confed. 85, 132–141 (2016). https://doi.org/10.1016/j.measurement.2016.02.030
Douglass, M.J.J., Caraça Santos, A.M.: Application of optical photogrammetry in radiation oncology: HDR surface mold brachytherapy. Brachytherapy 18, 689–700 (2019). https://doi.org/10.1016/j.brachy.2019.05.006
Ezat, M.A., Fritsch, C.J., Downs, C.T.: Use of an unmanned aerial vehicle (drone) to survey Nile crocodile populations: A case study at Lake Nyamithi, Ndumo game reserve, South Africa. Biol. Conserv. 223, 76–81 (2018). https://doi.org/10.1016/j.biocon.2018.04.032
Field, S., Waite, M., Wandsnider, L.A.: The utility of UAVs for archaeological surface survey: a comparative study. J. Archaeol. Sci. Reports 13, 577–582 (2017). https://doi.org/10.1016/j.jasrep.2017.05.006
Fonstad, M.A., Dietrich, J.T., Courville, B.C., et al.: Topographic structure from motion: a new development in photogrammetric measurement. Earth Surf. Process. Landforms 38, 421–430 (2013). https://doi.org/10.1002/esp.3366
Forlani, G., Dall’Asta, E., Diotri, F., et al.: Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 10, 311 (2018). https://doi.org/10.3390/rs10020311
Fraser, C.S., Cronk, S.: A hybrid measurement approach for close-range photogrammetry. ISPRS J. Photogramm. Remote Sens. 64, 328–333 (2009). https://doi.org/10.1016/j.isprsjprs.2008.09.009
Fuhrmann, S., Langguth, F., Moehrle, N., et al.: MVE - an image-based reconstruction environment. Comput. Graph. 53, 44–53 (2015). https://doi.org/10.1016/j.cag.2015.09.003
Green, J.: Underwater archaeological surveying using PhotoModeler, VirtualMapper: different applications for different problems. Int. J. Naut. Archaeol. 31, 283–292 (2002). https://doi.org/10.1006/ijna.2002.1041
Gruszczyński, W., Matwij, W., Ćwiąkała, P.: Comparison of low-altitude UAV photogrammetry with terrestrial laser scanning as data-source methods for terrain covered in low vegetation. ISPRS J. Photogramm. Remote Sens. 126, 168–179 (2017). https://doi.org/10.1016/j.isprsjprs.2017.02.015
Hernán-Pérez, A.S., Domínguez, M.G., González, C.R., Martín, A.P.: Using iphone camera in photomodeler for the 3D survey of a sculpture as practice for architecturés students. Procedia Comput. Sci. 25, 345–347 (2013). https://doi.org/10.1016/j.procs.2013.11.041
Jazayeri, I., Rajabifard, A., Kalantari, M.: A geometric and semantic evaluation of 3D data sourcing methods for land and property information. Land Use Policy 36, 219–230 (2014). https://doi.org/10.1016/j.landusepol.2013.08.004
Kemal Özgür Hastaoğlu, Y.G.: Monitoring 3D areal displacements by a new methodology and software using UAV photogrammetry. Int. J. Appl. Earth Observ. Geoinf. 83, 101916 (2019)
Kempkens, R., Roesch, P., Scott, L., Zettel, J.: Multi-layer multi-view architecture for software engineering environments. Inf. Softw. Technol. 42, 141–149 (2000). https://doi.org/10.1016/S0950-5849(99)00086-5
Kiss, Á., Szirányi, T.: Localizing people in multi-view environment using height map reconstruction in real-time. Pattern Recognit. Lett. 34, 2135–2143 (2013). https://doi.org/10.1016/j.patrec.2013.08.007
Kurniawan, R., Ariestasari, A., Silalahi, R.S., et al.: Identification Acroporidae and Favidae by a newly approach called Reef Identification Knowhow Application-Reconstructed by 3D Imagery (RIKA-R3DI) Method. MethodsX 6, 1084–1100 (2019). https://doi.org/10.1016/j.mex.2019.05.002
Li, X., Chen, Z., Zhang, L., Ting, D.: Construction and accuracy test of a 3d model of non-metric camera ımages using agisoft photoscan. Procedia Environ. Sci. 36, 184–190 (2016). https://doi.org/10.1016/j.proenv.2016.09.031
Liu, H., Tang, X., Shen, S.: Depth-map completion for large indoor scene reconstruction. Pattern Recognit. 99, 107112 (2020). https://doi.org/10.1016/j.patcog.2019.107112
Lynnerup, N., Andersen, M., Lauritsen, H.P.: Facial image identification using Photomodeler®. Leg. Med. 5, 156–160 (2003). https://doi.org/10.1016/S1344-6223(03)00054-3
Madawalagama, S.L., Munasinghe, N., Dampegama, S.D.P.J., Samarakoon, L.: Low cost aerial mapping with consumer-grade drones. In: 37th Asian Conference Remote Sensing, ACRS. vol. 3, pp. 2309–2316 (2016)
Pierdicca, R.: Mapping Chimu’s settlements for conservation purposes using UAV and close range photogrammetry. The virtual reconstruction of Palacio Tschudi, Chan Chan, Peru. Digital Applications in Archaeology and Cultural Heritage. pp. 27–34 (2018)
Peña-Villasenín, S., Gil-Docampo, M., Ortiz-Sanz, J.: Desktop vs cloud computing software for 3D measurement of building façades: The monastery of San Martín Pinario. Meas. J. Int. Meas. Confed. 149, 106984 (2020). https://doi.org/10.1016/j.measurement.2019.106984
Rabah, M., Basiouny, M., Ghanem, E., Elhadary, A.: Using RTK and VRS in direct geo-referencing of the UAV imagery. NRIAG J. Astron. Geophys. 7, 220–226 (2018). https://doi.org/10.1016/j.nrjag.2018.05.003
Rakha, T., Gorodetsky, A.: Review of unmanned aerial system (uas) applications in the built environment: towards automated building inspection procedures using drones. Autom. Constr. 93, 252–264 (2018). https://doi.org/10.1016/j.autcon.2018.05.002
De, R.J., Plets, G., Verhoeven, G., et al.: Towards a three-dimensional cost-effective registration of the archaeological heritage. J. Archaeol. Sci. 40, 1108–1121 (2013). https://doi.org/10.1016/j.jas.2012.08.040
Risse, B., Mangan, M., Stürzl, W., Webb, B.: Software to convert terrestrial LiDAR scans of natural environments into photorealistic meshes. Environ. Model Softw. 99, 88–100 (2018). https://doi.org/10.1016/j.envsoft.2017.09.018
Scarpa, L.J., Piña, C.I.: The use of drones for conservation: a methodological tool to survey caimans nests density. Biol. Conserv. 238, 108235 (2019). https://doi.org/10.1016/j.biocon.2019.108235
Schmitt, H.H., Petro, N.E., Wells, R.A., et al.: Revisiting the field geology of Taurus-Littrow. Icarus 298, 2–33 (2017). https://doi.org/10.1016/j.icarus.2016.11.042
Schonberger, J.L., Frahm, J.M.: Structure-from-motion revisited. In: Proceedings of IEEE Comput Social Conference Computer Vision Pattern Recognition, pp. 4104–4113 (2016). https://doi.org/10.1109/CVPR.2016.445
Stöcker, C., Nex, F., Koeva, M., Gerke, M.: Quality assessment of combined IMU/GNSS data for direct georeferencing in the context of UAV-based mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. - ISPRS Arch. 42, 355–361 (2017). https://doi.org/10.5194/isprs-archives-XLII-2-W6-355-2017
Sun, K., Tao, W.: A center-driven image set partition algorithm for efficient structure from motion. Inf. Sci. (Ny) 479, 101–115 (2019). https://doi.org/10.1016/j.ins.2018.11.055
Wang, S., Yue, J., Dong, Y., et al.: A synthetic dataset for Visual SLAM evaluation. Rob. Auton. Syst. 124, 103336 (2019). https://doi.org/10.1016/j.robot.2019.103336
Xu, Q., Li, J., Tao, W., Ming, D.: Efficient large-scale geometric verification for structure from motion. Pattern Recognit. Lett. 125, 166–173 (2019). https://doi.org/10.1016/j.patrec.2018.09.028
Yao, L., Kusakunniran, W., Wu, Q., et al.: Robust gait recognition using hybrid descriptors based on Skeleton Gait Energy Image. Pattern Recognit Lett. (2019) https://doi.org/10.1016/j.patrec.2019.05.012
Zhou, Y., Daakir, M., Rupnik, E., Pierrot-Deseilligny, M.: A two-step approach for the correction of rolling shutter distortion in UAV photogrammetry. ISPRS J. Photogramm. Remote Sens. 160, 51–66 (2020). https://doi.org/10.1016/j.isprsjprs.2019.11.020
Acknowledgements
This publication was fully supported by the Tenaga Nasional Berhad seeding fund under UNITEN R&D grantt No. U-TG-RD-19-14.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Zahari, N.M., Karim, M.A.A., Nurhikmah, F., Aziz, N.A., Zawawi, M.H., Mohamad, D. (2021). Review of Unmanned Aerial Vehicle Photogrammetry for Aerial Mapping Applications. In: Mohammed, B.S., Shafiq, N., Rahman M. Kutty, S., Mohamad, H., Balogun, AL. (eds) ICCOEE2020. ICCOEE 2021. Lecture Notes in Civil Engineering, vol 132. Springer, Singapore. https://doi.org/10.1007/978-981-33-6311-3_76
Download citation
DOI: https://doi.org/10.1007/978-981-33-6311-3_76
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-33-6310-6
Online ISBN: 978-981-33-6311-3
eBook Packages: EngineeringEngineering (R0)