
Abstract
Space-borne global navigation satellite system (GNSS) radio occultation (RO) is a superior tool for global sounding of atmosphere and ionosphere. The amount of operated low Earth orbit (LEO) satellite equipped with GNSS RO receivers for atmospheric sounding are surging in recent years. The orbits of these RO sounding satellites are varied because of the requirement of multitask. A digital simulation system aimed at GNSS RO atmospheric sounding satellite constellation design with or without on-orbit LEO satellites is presented in this paper. The system contains two main simulation modules. One of them is a transient position and velocity generator for both LEO satellites and GNSS satellites. The other is a forward GNSS RO event simulator for GNSS-LEO atmospheric sounding. In addition, a data processing module and graphical user interface (GUI) are designed and developed for interacting the data convenient and efficient in the initiative design of LEO satellite constellation. A Walker-δ satellite constellation with 6 LEO satellites is designed based on this system with simulations of GPS RO atmospheric sounding.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Space-borne radio occultation (RO) was developed for planetary exploration in 1960s. But it had not been used for the Earth sensing for years since the lack of a perfect radio signal source. The development of GPS brought the opportunity for RO with global coverage, low cost and high-precision. The excellent performance of GPS RO satellite system was verified by dozens of test low earth orbit (LEO) satellites launched in the last tow decades. As more countries and regions develop more and more constellations of global navigation satellite system (GNSS) such as GPS, GLONASS, Galileo and Beidou, IRNSS and QZSS, the method of GPS RO is renamed by GNSS RO [1]. There has been significant work done on the GNSS RO receiver design and sounding data processing [2].
As any kind of the Earth remote sensing missions, GNSS RO sounding is operated base on the orbit of LEO satellite, but it is distinct from the other missions. GNSS RO sounding is an edge and indirect detection [3]. A GNSS RO constellation design is primarily based on the status of GNSS, the performance of GNSS RO receivers, the simulation algorithm of signal propagation, the simulation algorithm of satellite orbital dynamics and the evaluating index. Though there are abundant studies on the simulation algorithm of satellite orbital dynamics, it brings large amount of calculation because of more the 130 GNSS satellites are operated on-orbit and a GNSS RO sounding satellite constellation will consist of dozens, or even hundreds of LEO satellites for optimal efficiency [4]. In addition, a GNSS-LEO RO event commonly lasts less than 1 min, and it happens randomly. Such as the simulation step is supposed to be less than 10 s, the relative position and attitude between hundreds of GNSS alliterates and LEO satellites, as well as the signal propagation, are computed according to this step. So far, GNSS RO sounding satellite constellation design is studied with 6–12 LEO satellites, and the on-orbit GNSS is seldom fully utilized [5,6,7,8].
This paper put forward a simulation system for GNSS RO atmospheric sounding satellite constellation design constructed by digital computers and interface devices. The application software is based on Microsoft Foundation Classes (MFC), so as to make full use of the powerful graphic user interface (GUI) design ability of Visual C++ platform.
2 Description of GNSS RO Satellite Constellation
2.1 Space-Borne GNSS RO Sounding
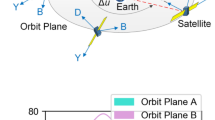
GNSS radio original signal are distorted because of the interference of atmospheric medium. Compared with the research on how to eliminate these error in space measurement technology, these GNSS radio signals recorded are used for inverting the atmospheric parameters in GNSS Meteorology. Space-borne GNSS RO sounding is the method in which GNSS signal receivers are equipped on LEO satellites. Considering the LEO satellite as a observer, a GNSS RO event happens when a GNSS satellite rising from the horizon or falling to horizon, as shown in Fig. 1. Based on the GNSS RO signal propagation path, atmosphere parameters could be indirect detected from the top of atmosphere to the earth’s surface in each GNSS RO event.

Diagram of GNSS RO sounding events
2.2 Design Flow of GNSS RO Sounding Satellite Constellation
Satellite constellation design is usually an iterative optimization process. Many factors need to be considered in the design of a GNSS RO sounding satellite constellation such as available constellation of GNSS, available operated LEO satellites, bending of signal propagation path corresponding to available GNSS signal frequency, GNSS RO antennas’ field of view and the effectiveness evaluation including the economic cost, the amount, the coverage, transmission delay, etc. The design process for such LEO satellite constellation is shown in Fig. 2.

Flow chart of GNSS RO satellite constellation design process
Firstly, the configuration of LEO satellite constellation or specific orbit parameters of LEO satellites are initialized and the constraints and index are given by the aerospace engineers. Secondly, orbit parameters of the LEO constellation and the GNSS constellations in a certain period should be generated [9], and the bending of signal propagation path related to the prior atmospheric model should be calculated [10]. Thirdly, the calculation and forward simulation should be carried out according to the GNSS RO simulation algorithm [11]. Fourthly, the sounding data should be processed and analyzed according to the mission analysis requirements. Finally, engineers make the resolution for this design by the multiple data statistics, and then give the initial parameters of the next group of iterative design.
3 Simulation System Design
3.1 Functional Framework
The functional requirements of the simulation system for GNSS RO sounding satellite constellation design mainly include eight contents as shown in Fig. 3, such as project initial setting, sounding constellation aided design, orbit dynamics simulations, atmospheric refraction simulation, forward RO event simulation, data processing and visualization, and data storage and management.

The simulation system function block diagram
3.2 Hardware Design
According to the functional requirements of the simulation system, the orbital dynamics simulations are carried out first in the simulation process. The CPU and memory utilization rate of the computer is high because of the huge amount of computation discussed as mentioned earlier, so two computers should be configured separately to simulate the GNSS satellite constellation and LEO satellite constellation.
Forward occultation simulation is the core function of the system, which is mainly completed by RO simulation computer. The position and attitude parameters needed for occultation simulation are calculated by GNSS satellite constellation simulation computer and LEO satellite constellation simulation computer, while the prior atmosphere data model needed for RO simulation is calculated before simulation. Based on the above considerations, the simulation function of the atmospheric model is realized by the RO simulation computer, and the prior atmospheric data calculation is completed in the initialization stage of the simulation.
Considering the mission parameters and certain sounding constellation parameters setting before the simulation and the data processing and analysis requirements after the simulation, the system scheme set up the main control computer to meet the corresponding functional requirements. Besides the graphical human-computer interface (GUI), the main control computer processing has the functions of simulation scheduling and control, and coordinates the system to complete the simulation process.
In addition, according to the requirements of simulation data storage and management, the system configures the data server to realize the simulation data storage management function; according to the requirements of simulation mission scene visualization, the system sets the data visualization computer to realize the mission scene dynamic visualization function.
Because the whole system is a digital simulation system, there is no requirement for real-time operation of the system and network communication delay. Therefore, the communication between simulation computers can meet the requirements by using general Ethernet.
3.3 Software Design
The software of the simulation system for GNSS RO satellite constellation design mainly includes five contents such as main control software, constellation simulation software, forward RO simulation software, data service software, and data visualization software. Three of the key software modules are introduced in detail.
Main Control Software.
The main control software is the main operation object of the user to design and analysis a GNSS RO satellite constellation as shown in Fig. 4. The whole interactive function of simulation test between the system and mission analyst is realized in the main control module.

The interface of main control software
The interaction between the system user and the main control software is various, and the scheduling management process is complex. It is a difficult point in the development of the system to design the user interface and interaction function of the main control software reasonably and to ensure the integrity and good interface of GUI at the same time. On the one hand, deeply understanding the requirements of software interaction, reasonably positioning the human-computer interaction function; on the other hand, developing the interface prototype application program as a software rapid prototype for testing, timely discovering design defects, and improving the design.
The input and output of the main control software includes the input and output for mission analysts and other software users, as well as the input and output for other simulation software in the system, as shown in Fig. 5. The former is the direct realization of system data input and output requirements.

The main control software function block diagram
Constellation Simulation Software.
The constellation simulation software mainly provides the orbital dynamic simulation of GNSS constellation and LEO constellation, provides position and attitude parameters for RO event simulation. It has the function of calculating the visible sequence of data transmission and orbit lighting of occultation detection constellation. In addition, considering the needs of software distributed simulation, it also has simulation scheduling and data management functions and network communication and data service functions as shown in Fig. 6.

The constellation simulation software function block diagram
The input parameters of this software mainly include mission scheme, simulation control, satellite constellation configuration, ground station location, etc. The output parameters mainly include constellation orbit, simulation control, transmission visibility and eclipse.
Forward RO Simulation Software.
The forward RO simulation software can calculate the temporal and spatial distribution parameters of occultation events according to the orbit parameters and atmospheric environment parameters. It is mainly composed of user interface, simulation module of occultation event, simulation scheduling and data management module, network communication and data service and other functional modules as shown in Fig. 7.

The constellation simulation model software function block diagram
The RO event simulation module includes prior data calculation, atmosphere Model setting, reflection calculation and bending angle calculating. Occultation event integration and attribute calculation module mainly are focus on two aspects: one is the calculation of occultation determination and location, the other is the integration and attribute calculation of all occultation events in the simulation time.
4 Experiment
According to the satellite calendars and RO data provided by COSMIC, an experiment was taken to evaluate the accuracy of this simulation system.
GPS constellation is used as GNSS RO sources, and the LEO satellite constellation is set to be the same as COSMIC constellation. The result of 24-hour RO simulation shows that the occultation event recurrence rate is 100%. Deviation between predicted and actual sounding points in 24 h is shown in Fig. 8. The blue dots marks the predicted points calculated by simulation, while the red dots marks actual points from COSMIC.

The constellation simulation model software function block diagram
According to the initial orbit parameters of each satellite in the constellation, the satellite orbit simulation and orbit prediction can be realized quickly, and it can be effectively used to forward simulate the occultation event, calculate the space-time distribution parameters, and automatically generate the required performance analysis chart. In the main evaluation items of detection performance, the maximum latitude difference of occultation sounding is 3.98°, the ratio of latitude deviation within 1° is above 97.0%, and the ratio of longitude deviation within 1° is above 84%, which meets the application task demand of numerical weather prediction (NWP).
5 Conclusion
A digital simulation system has been designed based on forward RO simulation to predict the performance of space-borne GNSS RO atmospheric sounding, which provides a convenient tool for the iterative design of the LEO sounding satellite constellation. The experiment result shows that its performance predication meets the requirement of NWP application and has great potential for the design of GNSS RO sounding satellite constellation developing towards multi-GNSS, multi-function, heterogeneous and largeness.
References
Steiner, A.K., Kirchengast, G., Foelsche, U., et al.: GNSS occultation sounding for climate monitoring. Phys. Chem. Earth Part A. 26(3), 113–124 (2001)
Wickert, J., Michalak, G., Schmidt, T., et al.: GPS radio occultation: results from CHAMP, GRACE and FORMOSAT-3/COSMIC. Terr. Atmos. Oceanic Sci. 20(1), 35–50 (2009)
Zakharenkova, I., Cherniak, I.: Underutilized spaceborne GPS observations for space weather monitoring. Space Weather 16(4), 345–362 (2018)
Earth information. http://spire.com/earth-information-data. Accessed 21 Apr 2020
Yeying, W., Yang, F., Xiaoyong, D., et al.: Advances in global GNSS occultation projects. Meteorol. Sci. Technol. 37(1), 74–78 (2009)
Bin, L., Jueyao, W., Cheng, L., et al.: Design of multi-GNSS occultation sounding satellite constellation. J. Astronaut. 37(3), 334–340 (2016)
Juang, J.C., Tsai, Y.F., Chu, C.H.: On constellation design of multi-GNSS radio occultation mission. Acta Astronaut. 82, 88–94 (2013)
Xiaohua, X., Yi, H., Jia, L., et al.: Seeking optimal GNSS radio occultation constellation using evolutionary algorithms. Remote Sens. 11(5), 571–577 (2019)
Wang, N.Q., Liu, X.D., Chen, Z., et al.: A semi-physical real-time simulation platform for satellite attitude control system based on MATLAB. Acta Simulata Systematica Sinica 7 (2005)
Yaqiong, L., Yang, L., Guizhu, G., et al.: The application of MATLAB and STK combined simulation for design of spaceborne antenna servo system. J. Telemetry Tracking Command 37(5), 1–5 (2016)
Jueyao, W., Liang, B.: 4-GNSS radio occultation satellite constellation design based on Dual-gate uniformity evaluation index. Proc. Inst. Mech. Eng. Part G J. Aerosp.ce Eng. 231(1), 3–16 (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Wang, JY., Gao, C., Yan, F., Wei, SL., He, M., Guo, B. (2021). Design and Development of a Simulation System for GNSS Radio Occultation Satellite Constellation Design. In: Wang, Y., Xu, L., Yan, Y., Zou, J. (eds) Signal and Information Processing, Networking and Computers. Lecture Notes in Electrical Engineering, vol 677. Springer, Singapore. https://doi.org/10.1007/978-981-33-4102-9_23
Download citation
DOI: https://doi.org/10.1007/978-981-33-4102-9_23
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-33-4101-2
Online ISBN: 978-981-33-4102-9
eBook Packages: EngineeringEngineering (R0)