
Abstract
A general method of parametric stability region calculation for a non-linear transvers-torsional coupled gear train’s vibration model with multiple-clearances is studied. There are six steps in the method, and the first step is strength and fatigue life threshold determination, and the second step was deciding numerical integration time according to the motion state of the system when the parameters discussed changed in their test range, the third step is calculating the maximum displacement of the system when the parameters discussed changed in their range by using nested loop algorithm, the forth step is calculating the value which equals the maximum displacement subtracted by minimum displacement by the same method with third step, the fifth step is the stability judgment by comparing the value which is calculated in step four and five with threshold which is set in second step, and the last step is make the parametric stability region map of the system. As an example, the stability region calculation of a coupling transverse-torsional gear train vibration model with multiple-clearances is studied under the parameter of the backlash, mesh damp ratio, input rotation speed and the bearing clearance of the driving wheel and driven wheel, and the stable region of input rotation speed, backlash, meshing damp ratio and the bearing clearances are calculated respectively.
This project is supported by Changzhou Institute of Technology.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
Gear transmission system has the characteristics of high power and speed, harsh work conditions, small shape and low weight as well as high design objective. Gear system has been more and more extensive use in the field of aviation, watercraft, automobile and heavy machine, and many scholars has been attracted into the research area of gear dynamics and stability demotic and overseas [1, 2]. Not only resonance would happen when excitation frequency close to natural frequency, but also close to multi-fold frequency in nonlinear system, which could cause instability. So finding out the stable and unstable region could guide the design and generate practical significance.
System parametric stable region includes the motion stability, vibration strength stability and fatigue life stability, motion stability means the motion condition does not change under small disturbance; strength stability means system vibration amplitude does not mutation under small disturbance and not cause gear crack under instantaneous peak stress; Fatigue life stability means gear would be disabled because of periodic or random stress \( \Delta \sigma \), the life of the system could be predicted by S-N curve.
When under the periodic one motion, the amplitude of the system will change periodically under the periodic change of the meshing stiffness. Normally, the amplitude of the system will not surpass the stress limit except the severe overload condition. When system under the multi-periodic or chaos motion, Unilateral or bilateral impact would happen corresponding. The amplitude of vibration would not surpass stress limit, but the stress change range could cause failure with the time. In other words, those parametric region which bring failures called fatigue life instability.
Lin [7] studied the parametric instability region caused by time-varying meshing stiffness, but ignored the influence generated by backlash. Li [8] studied the stability region of planetary gear transmission system, and the parameters including input speed, backlash and damping ratio are considered.
From the available literature on gear system stability, the main research work focuses on the stability of the periodic motion state of a single pair of gears [4, 6], but it is rare to calculate the stability domain of multiple clearance and bending-torsion coupled nonlinear vibration system based on the concept of the stability of static vibration strength and fatigue strength. In this paper, the stability domain based on vibration strength and fatigue life of multiple clearances of nonlinear vibration system has been researched, and the parameters including input speed, backlash and mesh damping has been considered. The stable domain has been analyzed under the above parameters in different combinations.
1 Modeling
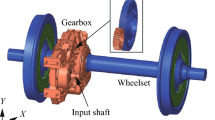
The multiple clearances and bending-torsional nonlinear gear transmission system is consist of a pair of gear, shaft and bearing, the gear is assumed to be spur gear and without considering friction. This mathematical model is shown in Fig. 1.

Multiple-clearance transverse-torsional coupled model
In Fig. 1, the angle displacement of active and passive gear are denoted by \( \theta_{\text{d}} \) and \( \theta_{\text{p}} \), base radius are symbolized by \( r_{\text{d}} \) and \( r_{\text{p}} \), \( e_{\text{d}} \) and \( e_{\text{p}} \) are the eccentric errors, \( \varphi_{\text{d}} \) and \( \varphi_{\text{p}} \) are phase errors. The active gear’s supporting stiffness, backlash and damping are described by \( k_{\text{d}} \), \( b_{\text{d}} \) and \( c_{\text{d}} \), the passive gear’s stiffness, backlash and damping are denoted by \( k_{\text{p}} \), \( b_{\text{p}} \) and \( c_{\text{p}} \). The comprehensive meshing error, time-varying meshing stiffness, backlash and meshing damping are denoted by \( e(t) \), \( k(t) \), \( b \) and \( c_{m} \), \( e_{\text{d}} \) and \( e_{\text{p}} \) are active and passive gear’s eccentric error, \( \varphi_{\text{d}} \) and \( \varphi_{\text{p}} \) are the active and passive gear’s initial phase.
According to the characteristics of meshing stiffness of the spur gear, it could be assumed to be square wave. Periodical curve could be expressed by Fourier series, the first item is adopt and the time-varying meshing stiffness could be expressed as follows
Where, \( k_{m} \) is the average value of meshing stiffness, \( k_{a} \) is alternating stiffness, \( \varphi \) is initial phase, and \( \omega \) is meshing frequency.
The system has four degrees, and it’s coordinate could be expressed by \( (\theta_{d} ,X_{d} ,\theta_{p} ,X_{p} )^{T} \), where \( \theta_{d} \) and \( X_{d} \) are the active gear’s rotating and longitudinal freedom, \( \theta_{p} \) and \( X_{p} \) are the passive gear’s rotating and longitudinal freedom.
1.1 Dynamic Meshing Force
For single pair external meshed gear, the relative displacement \( X_{r} \) on the meshing line and comprehensive error could be expressed as
Where, \( e(t) \) is the project on the meshing line of the comprehensive error, \( x_{d} \) and \( x_{p} \) are the displacement on the meshing line of active and passive.
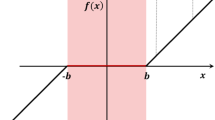
The nonlinear function of backlash and supporting clearances could be expressed as
The dynamic force is consist of elastic restoring force and damping force, and could be expressed as
Damping coefficient is expressed as
Where, \( \zeta \) is the damping ratio, \( m_{d} \) is the mass of active gear, \( m_{p} \) is the mass of passive gear.
1.2 Controlling Equation
Under the effect of torque \( T_{d} \) and load \( T_{p} \), the differential equation for the system shown in Fig. 1 could be expressed as
In order to eliminate the rigid displacement and simplify the equation, under the condition of without affecting the solution of equation, the relative coordinates is introduced as follows
Where X is the superposition of the relative displacement on the meshing line, which has the same dynamic characteristics with \( x_{d} \) and \( x_{p} \).
The dimensionless time is introduced, which could be expressed as \( \tau = \omega_{n} t \), where \( \omega_{n} = \sqrt {k_{m} /m_{e} } \), \( k_{m} \) is the average value of meshing stiffness, \( m_{e} = m_{d} m_{p} /(m_{d} + m_{p} ) \), the nominal displacement scale \( b_{c} \) is introduced as well. Based on the above parameters, the dimensionless displacement, velocity and acceleration could be expressed as \( X = \bar{X}b_{c} \), \( \dot{X} = \dot{\bar{X}}b_{c} \omega_{n} \), \( \ddot{X} = \ddot{\bar{X}}b_{c} \omega_{n}^{2} \), \( b = \bar{b}b_{c} \), \( \Omega = \omega /{\omega_n} \), \( {\Omega_d} = {\omega_d}/{\omega_n} \), \( {\Omega_p} = {\omega_p}/{\omega_n} \) respectively.
Put all the above parameters into Eq. (6), and simplify it into matric form, the dimensionless equation could be expressed as
Where \( \xi_{ 1 1} = {{c_{m} } \mathord{\left/ {\vphantom {{c_{m} } {m_{e} \omega_{n} }}} \right. \kern-0pt} {m_{e} \omega_{n} }} + {{c_{m} } \mathord{\left/ {\vphantom {{c_{m} } {m_{d} \omega_{n} }}} \right. \kern-0pt} {m_{d} \omega_{n} }} + {{c_{m} } \mathord{\left/ {\vphantom {{c_{m} } {m_{p} \omega_{n} }}} \right. \kern-0pt} {m_{p} \omega_{n} }} \), \( \xi_{ 1 2} = {{c_{d} } \mathord{\left/ {\vphantom {{c_{d} } {m_{d} \omega_{n} }}} \right. \kern-0pt} {m_{d} \omega_{n} }} \), \( \xi_{ 1 3} = - {{c_{p} } \mathord{\left/ {\vphantom {{c_{p} } {m_{p} \omega_{n} }}} \right. \kern-0pt} {m_{p} \omega_{n} }} \), \( \xi_{ 2 1} = {{c_{m} } \mathord{\left/ {\vphantom {{c_{m} } {m_{d} \omega_{n} }}} \right. \kern-0pt} {m_{d} \omega_{n} }} \), \( \xi_{ 2 2} = {{c_{d} } \mathord{\left/ {\vphantom {{c_{d} } {m_{d} \omega_{n} }}} \right. \kern-0pt} {m_{d} \omega_{n} }} \), \( \xi_{ 3 1} = - {{c_{m} } \mathord{\left/ {\vphantom {{c_{m} } {m_{p} \omega_{n} }}} \right. \kern-0pt} {m_{p} \omega_{n} }} \), \( \xi_{ 3 3} = {{c_{p} } \mathord{\left/ {\vphantom {{c_{p} } {m_{p} \omega_{n} }}} \right. \kern-0pt} {m_{p} \omega_{n} }} \), \( k_{12} = {{k_{d} } \mathord{\left/ {\vphantom {{k_{d} } {m_{d} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{d} \omega_{n}^{2} }} \), \( k_{13} = - {{k_{p} } \mathord{\left/ {\vphantom {{k_{p} } {m_{p} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{p} \omega_{n}^{2} }} \), \( k_{11} = {{\left( {k_{m} - k_{a} \cos (\Omega t)} \right)} \mathord{\left/ {\vphantom {{\left( {k_{m} - k_{a} \cos (\Omega t)} \right)} {({1 \mathord{\left/ {\vphantom {1 {m_{e} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{e} \omega_{n}^{2} }} + {1 \mathord{\left/ {\vphantom {1 {m_{d} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{d} \omega_{n}^{2} }} + {1 \mathord{\left/ {\vphantom {1 {m_{p} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{p} \omega_{n}^{2} }})}}} \right. \kern-0pt} {({1 \mathord{\left/ {\vphantom {1 {m_{e} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{e} \omega_{n}^{2} }} + {1 \mathord{\left/ {\vphantom {1 {m_{d} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{d} \omega_{n}^{2} }} + {1 \mathord{\left/ {\vphantom {1 {m_{p} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{p} \omega_{n}^{2} }})}} \), \( k_{21} = {{\left( {k_{m} - k_{a} \cos (\Omega t)} \right)} \mathord{\left/ {\vphantom {{\left( {k_{m} - k_{a} \cos (\Omega t)} \right)} {m_{d} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{d} \omega_{n}^{2} }} \), \( k_{22} = {{k_{d} } \mathord{\left/ {\vphantom {{k_{d} } {m_{d} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{d} \omega_{n}^{2} }} \), \( k_{31} = - {{\left( {k_{m} - k_{a} \cos (\Omega t)} \right)} \mathord{\left/ {\vphantom {{\left( {k_{m} - k_{a} \cos (\Omega t)} \right)} {m_{p} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{p} \omega_{n}^{2} }} \), \( k_{33} = {{k_{p} } \mathord{\left/ {\vphantom {{k_{p} } {m_{p} \omega_{n}^{2} }}} \right. \kern-0pt} {m_{p} \omega_{n}^{2} }} \), \( \begin{aligned} \bar{F}_{1} = & {F \mathord{\left/ {\vphantom {F {b_{c} m_{e} \omega_{n}^{2} }}} \right. \kern-0pt} {b_{c} m_{e} \omega_{n}^{2} }} + {{e\omega^{2} \cos (\Omega t)} \mathord{\left/ {\vphantom {{e\omega^{2} \cos (\Omega t)} {b_{c} \omega_{n}^{2} }}} \right. \kern-0pt} {b_{c} \omega_{n}^{2} }} \\ {\kern 1pt} & + {{e_{d} \omega_{d}^{2} \cos (\Omega_{d} t)} \mathord{\left/ {\vphantom {{e_{d} \omega_{d}^{2} \cos (\Omega_{d} t)} {b_{c} \omega_{n}^{2} }}} \right. \kern-0pt} {b_{c} \omega_{n}^{2} }} + {{e_{p} \omega_{p}^{2} \cos (\Omega_{p} t)} \mathord{\left/ {\vphantom {{e_{p} \omega_{p}^{2} \cos (\Omega_{p} t)} {b_{c} \omega_{n}^{2} }}} \right. \kern-0pt} {b_{c} \omega_{n}^{2} }} \\ \end{aligned} \).
2 Calculation Method of Parametric Region
Refer to connotation of the static strength and fatigue life stability region, the calculation method of stable region of multiple clearances and bending-torsional coupled gear system could obey the following steps:
-
1.
In order to analyze the stable and unstable region quantitatively, two index have been defined. According to the bending strength and fatigue life, a vibration static unstable displacement threshold value \( {\text{X}}^{*} \) and fatigue life unstable threshold value \( \Delta {\text{X}}^{*} \) have established.
-
2.
Choose appropriate Poincare section \( \varSigma =\{ \left( {\tau ,X} \right) \in R \times R^{n} |\tau = mod\left( {2\pi /\omega } \right), x_{i} = \hbox{max} (abs\left( {x_{i0} \to x_{iT} } \right)\} , \) where \( x_{i} \) means the maximum displacement under a certain periodic excitation force of the ith state variable, \( \omega \) is the meshing frequency.
-
3.
Choose appropriate Poincare section \( \varSigma =\{ (\tau ,X) \in R \times R^{n} |\tau = mod\left( {2\pi /\omega } \right), \;\Delta x_{i} = {\text{abs}}(\hbox{max} \left( {x_{i0} \to x_{iT} } \right) - \hbox{min} \left( {x_{i0} \to x_{iT} } \right))\} ,\; \Delta x_{i} = {\text{abs}}(\hbox{max} \left( {x_{i0} \to x_{iT} } \right) - \hbox{min} \left( {x_{i0} \to x_{iT} } \right)) \) means the absolute value of the difference for the maximum and minimum value under a certain periodic excitation force of the ith state variable.
-
4.
By the method of numerical integration and in a certain time region, system’s maximum and minimum stable displacements are obtained, and absolute value of the subtraction is gained as well [8].
-
5.
Use the method of loop nesting, calculate system’s maximum and minimum displacement under different parameter combination, and compare the subtraction with the unstable threshold value. Evaluate whether the system motion is in unstable condition, and put “1” into the matrix if the motion is unstable.
-
6.
System’s stable and unstable region could be obtained by outputting the data in the matrix graphically.
3 Stable Region Calculation
Taking the multiple clearances and bending-torsional coupled gear transmission system as study object, and select a group of parameters, including \( m \) = 3 mm, \( \alpha \) = 20°, \( z_{d} \) = 40, \( z_{p} \) = 80, \( e_{d} \) = 10 \( {\upmu}{\rm m} \), \( e_{p} \) = 10 \( {\upmu}{\rm m} \), \( b_{c} \) = 10 \( {\upmu}{\rm m} \), \( b_{d} \) = 10 \( {\upmu}{\rm m} \), \( b_{\text{p}} \) = 10 \( {\upmu}{\rm m} \), \( k_{d} = 0.2{\kern 1pt} \;\text{GN}/\text{m} \), \( k_{p} = 0.35\;\text{GN}/\text{m} \), input power P = 200 kw.
Choose input speed \( n \), backlash b, damping ratio \( \xi \), active and passive gear’s supporting clearances \( b_{d} \) and \( b_{p} \) as research parameters. Set the five times of backlash as the strength threshold, and ten times of backlash as the fatigue life threshold.
3.1 Single Parameter Stable Region
There are five main parameters in multiple clearances and bending-torsional coupled gear transmission system, including input speed, backlash, meshing damping, active and passive gear’s supporting clearances. In order to reduce the computing scale, only taking input speed as single parameter to study the stable region.
When backlash \( b = 4 \times 10^{ - 5} \;\text{m} \), damping ratio \( \xi \) = 0.05, input speed is in between 1000–10000 r/min, the curve of strength threshold \( X^{ *} \) versus input speed is obtained, as shown in Fig. 2. As shown in Fig. 2, the speed n is mostly located in between 5300–5400 r/min and 6200–7600 r/min when maximum displacement surpass the 5b. In this region, the maximum displacement exceed the 5b, and could be regarded as the unstable region, the other speed range could be considered as stable region.

System motion static strength threshold-rotation speed
Under the same backlash and damping ration, when input speed is in between 1000–10000 r/min, the curve of fatigue life threshold \( \Delta X^{ *} \) versus input speed is obtained as well, as shown in Fig. 3, where the speed n is mostly located in between 4800–5200 r/min and 5600–9000 r/min when maximum displacement surpass the 10b, which means the speed in this range could cause system unstable. In this region, the maximum displacement exceed the 5b, and could be regarded as the unstable region, the other speed range could be considered as stable region.

System motion fatigue strength threshold-rotation speed
Think Figs. 2 and 3 together, the single parameter stable region based on the static strength and fatigue life could be obtained. When fatigue life threshold becomes bigger, the stable region will be compressed. Both considering static strength and fatigue life threshold, the unstable region is located in between 4800–5400 r/min and 5600–9000 r/min.
Additionally, the first critical speed of the system could be obtained from Figs. 2 and 3, which almost located in between the range of 6000–8000 r/min, by theoretical calculation, the critical speed of this system is 6837 r/min.
3.2 Double Parameters Stable Region
Because the system has many kinds of double parameter combinations, now take input speed and backlash for example to study the stable region. Assume the damping ratio equals 0.05, active gears supporting clearance is 2 × 10−5 m, and study the stable region when speed located in between 1000-10000r/min and backlash in between 1 × 10−5–10 × 10−5 m. In Figs. 4, 5 and 6, “\( \bullet \)” means stable region. Figure 4 is the stable region calculated by strength threshold value, Fig. 5 is the stable region calculated by fatigue value threshold value, and Fig. 6 is the double parameter stable region calculated by static strength threshold and fatigue life threshold value. By comparing the Figs. 4, 5 and 6, it could be conclude that the double parameter stable region is the common region of the Figs. 4 and 5, which is mostly located in the range of 5000–9000 r/min.

Parametric stable region of rotation speed-backlash (Static strength threshold equals 5b)

Parametric stable region of rotation speed-backlash (Fatigue strength threshold equals 10b)

Parametric stable region of rotation speed-backlash (Static and fatigue strength threshold equal 5b and 10b)
3.3 Triple Parameters Stable Region
Figure 7 is the triple stable region of speed versus backlash versus damping ration diagram by the method above, where the range of damping ratio is in between 0–0.4, backlash is in between 1 × 10−5 and 8 × 10−5m, the speed range is from 1000 to 8000 r/min, and “\( \bullet \)” means the stable region. As shown in Fig., it could be seen that the unstable region mostly located in the range of big backlash, low speed and low damping. Figure 8 is the triple parameter stable region of backlash versus active gear’s supporting clearances versus passive gear’s supporting clearance by the same method. From Figs. 7 and 8, the stable region and appropriate parameters group could be obtained and guide the detail design. By the same method, the four or five parameter stable region could be calculated as well.

Stable region of rotation speed-backlash-damp ratio

Stable region of backlash-drive bearing clearance-driven bearing clearance
4 Conclusion
-
1.
A kind of stable region calculation method have been proposed for the multiple clearances and bending-torsional coupled gear transmission system. By choosing appropriate static strength and fatigue life threshold, calculate the related parameter range, and the stable region could be achieved correspondingly.
-
2.
A four degree nonlinear gear transmission system has been established, and the parameters including backlash, supporting clearance, input speed and damping ratio has been considered to calculate the stable region. By the calculate method, the single parameter, double parameter and triple parameter stable region was obtained which could guide the design of gear transmission system.
References
Zhu, F., Li, W., Maropoulos, P.G.: Tolerance analysis of a planetary gear reducer under cad circumstance. Chin. J. Mech. Eng. 18(3), 342–345 (2005)
Sun, D., Qin, D., Wang, H.: Control strategy of a parallel hybrid car with a metal belt-planetary gear continuously variable transmission system. Chin. J. Mech. Eng. 15(3), 199–203 (2002)
Sun, Z., Ji, H., Shen, Y.: Nonliear dynamics of 2 K-H planetary gear train. J. Tsing-hua Univ. Sci. Technol. 43(5), 636–639 (2003)
Gao, Z., Shen, Y., Li, S.: Research on the periodic solution structure and its stability off non-linear system with clearance. Chin. J. Mech. Eng. 40(5), 17–22 (2004)
Chen, A., Luo, S., Wang, W.: Numerical investigations on dynamic transmission error and stability of a geared rotor-bearing system. J. Mech. Eng. 40(4), 21–25 (2004)
Yu, Y., Yu, L., Liu, H.: Stability and bifurcation of nonlinear bearing-rotor system. J. Mech. Eng. 40(10), 62–67 (2004)
Lin, J., Parker, R.G.: Planetary gear parametric instability caused by mesh stiffness variation. J. Sound Vib. 1, 129–145 (2002)
Li, T., Zhu, R., Bao, H.: Method of stability region determination for planetary gear train’s parameters based on nonlinear vibration model. J. Aerosp. Power 27(6), 1416–1423 (2012)
Zhang, W.: The application of fatigue damage theory for gear fatigue calculation under non-stable and varying load. 15(supp.), 52–57 (1987)
Wang, S., Shen, Y., Dong, H.: Chaos and bifurcation analysis of a spur gear pair with combine friction and clearance. Chin. J. Mech. Eng. 38(9), 8–11 (2002)
Li, T., Zhu, R., Bao, H.: Nonlinear torsional vibration modeling and bifurcation characteristic study of a planetary gear train. Chin. J. Mech. Eng. 47(21), 76–83 (2011)
Sun, Z., Shen, Y., Wang, S., Li, H.: Bifurcation and chaos of star gear system. Chin. J. Mech. Eng. 37(12), 11–15 (2001)
Ahmadian, M., DeGuilio, A.P.: Recent advances in the use of piezoceramics for vibration suppression. Shock Vibr. Dig. 33(1), 15–22 (2001)
Gu, H.C., Song, G.B.: Active vibration suppression of a flexible beam with piezoceramic patches using robust model reference control. Smart Mater. Struct. 16(4), 1453–1459 (2007)
Lamarque, C.H., Bastien, J.: Numerical study of a forced pendulum with friction. Nonlinear Dyn. 23(4), 335–352 (2000)
di Bernardo, M., Kowalczyk, P., Nordmark, A.: Bifurcations of dynamical systems with sliding: derivation of normal form mapping. Phys. D 170(3–4), 175–205 (2002)
Louroza, M.A., Roitman, N., Magluta, C.: Vibration reduction using passive absorption system with Coulomb damping. Mech. Syst. Sig. Process. 19(3), 537–549 (2005)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sheng, D., Li, X., Zhu, R. (2020). A Method of Parametric Stability Region Determination for Non-linear Gear Transmission System. In: Tan, J. (eds) Advances in Mechanical Design. ICMD 2019. Mechanisms and Machine Science, vol 77. Springer, Singapore. https://doi.org/10.1007/978-981-32-9941-2_46
Download citation
DOI: https://doi.org/10.1007/978-981-32-9941-2_46
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-32-9940-5
Online ISBN: 978-981-32-9941-2
eBook Packages: EngineeringEngineering (R0)