
Abstract
This work proposes a hybrid machining robot RPR/RP + RR + P based on a planar parallel mechanism. Based on the screw theory, the characteristics of the degree of freedom of the hybrid robot are analyzed, and then the inverse and forward kinematics are solved by geometric methods. And size optimization is carried out by taking the workspace and driving forces as the objects. Then the working space of the hybrid robot is calculated by the Monte Carlo method. Finally, the three-dimensional model of the mechanism is established, and through ADAMS simulation, the accuracy of the inverse kinematics solution was verified.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
With the development of aerospace, aviation, automotive industries, and so on, the demands for high-efficiency machining of large-scale structural parts with high material removal ratio and complex parts with curved surfaces increase rapidly. At the same time, traditional serial machine tools have insufficient flexibility, large inertia, and parallel machine tools have small working space, which fails to meet the requirements. The new types of machining equipment are urgently needed. Compared with serial robots and parallel robots, hybrid robots combine the advantages of these two robots and have attracted the attention of many researchers and companies. Hybrid robots can be divided into planar hybrid robots (formed by connecting a swing head with a certain degree of freedom (DOF) in serial on a planar parallel mechanism) and spatial hybrid robots (formed by connecting a swing head with a certain DOF in serial on a spatial parallel mechanism). Compared with the spatial hybrid mechanism, the planar hybrid mechanism has the advantages of simple structure, simple kinematics and dynamics models and low manufacturing cost.
At present, there are many spatial hybrid robots, such as Tricept hybrid robots [1, 2], Exechon hybrid machining center [3, 4], TriMule [5, 6] and TriVariant [7, 8] hybrid robots as well as other robots [9,10,11,12,13,14] etc. And there are relatively few planar hybrid mechanisms. Yang and Wang [15] proposed to develop the XNZD755 planar hybrid machine tool and analyzed the dynamics of the machine tool. A redundantly actuated 3-DOF planar PM was developed in [16] for a 4-DOF hybrid machine tool and again in [17] for 5-DOF one.
This work will propose a new five-DOF planar hybrid robot RPR/RP + RR + P, which is used to machine complex aluminum alloy parts for new energy vehicles.
The remainder of this article is organized as follows: Sect. 2 describes the composition of the hybrid robot, and introduces the DOF of the mechanism. Section 3 analyzes the robot’s inverse and forward kinematic. Section 4 carries out the size optimization by taking the workspace and driving forces as the objects, and analyzes the workspace of the hybrid robot under the given mechanism parameters. Section 5 gives the three-dimensional model of the mechanism, and the verifies the correction of inverse kinematics analysis. Finally, conclusions are drawn in Sect. 6.
2 Description of the Five-Axis Hybrid Robot
2.1 Mechanism Composition
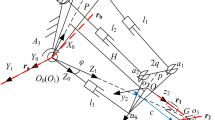
The RPR/RP + RR hybrid robot proposed in this article is shown in Fig. 1. The robot consists of three parts: a planar parallel mechanism RPR/RP, a serial BC swing head, and a serial P joint. The moving platform of the parallel mechanism RPR/RP is supported by two limbs A1a1 and A2a2. The limb A1a1 is connected to the fixed platform and moving platform both through the R joint. The limb A2a2 is connected to the fixed platform through an R joint, which is connected to the moving platform through a prismatic joint directly. The axes of three R joints are parallel to each other, and the axes of the prismatic are perpendicular to the axes of the R joints.

Schematic diagram of the hybrid robot
As shown in Fig. 1, the fixed platform and the moving platform of the parallel mechanism are equivalent to two straight lines. The length of the fixed platform is 2a, and the length of the moving platform is 2b. Point G is the intersection point of the BC swing head. The straight-line Go3 is perpendicular to the moving platform, the vertical foot is the o2 point, the length of Go3 is k, and the length between the intersection point of the BC swing head and the tip of the tool is f.
2.2 Coordinate System Establishment
In order to establish the position model of the mechanism, the global frame O-XYZ is established at point O on the fixed platform, where the X-axis is parallel to the line A2A1, the Z-axis is parallel to the axis of the R joint, and the right-hand system rule determines the Y-axis. The local frame o1-x1y1z1 is established at o1 on the fixed platform, where the x1-axis points from point A2 to A1, the z1-axis is collinear with the Z-axis, and the right-hand system rule determines the y1-axis.
The local frame o2-x2y2z2 is established at point A2, where the x2-axis is collinear with A1A2, the z2-axis is collinear with the axis of the R21, and the right-hand system rule determines the y2-axis. The local frame o3-x3y3z3 is established at the midpoint of a1a2, where the x3-axis is collinear with a1a2, the y3-axis is collinear with the C axis of the BC swing head, and the right-hand system rule determines the z3-axis. Moreover, the local frame o4-x4y4z4 is established at the point G, where the y4-axis is collinear with the axis of the end handle, and the z4-axis is collinear with the B axis. The right-hand system rule determines the x4-axis, as shown in Fig. 1.
2.3 Degree of Freedom Analysis
The hybrid robot is composed of a parallel part and two serial parts. The parallel part mechanism is RPR/RP, composed of limbs A1a1 and A2a2. The schematic diagram of the parallel mechanism RPR/RP is shown in Fig. 2.

Schematic diagram of the parallel mechanism
The DOF of the parallel mechanism can be calculated from the revised G-K formula:
- d:
-
The order of the parallel mechanism, \(d = 6 - \lambda\);
- n:
-
Number of parallel mechanism components;
- g:
-
Number of joints of parallel mechanism;
- \(f_{i}\):
-
The number of DOFs of the ith joint;
- v:
-
Number of redundant constraints of parallel mechanism.
The expression of redundant constraint v is:
where l is the number of remaining constraint wrenches after removing the public constraints of the mechanism, and k is the rank of the remaining constraint wrenches. It can be obtained that l is 3, k is 3, the DOF of the RPR/RP mechanism can be obtained as:
The DOF of the parallel mechanism is 2, including the translation along the rod A2a2 and the rotation around the axis of the R joint at A2.
The mechanism is a parallel mechanism in serial with a serial two-DOF BC swing head and a serial one-DOF P joint, so the hybrid robot is a five-DOF hybrid robot.
3 Inverse and Forward Kinematics Analysis
3.1 Inverse Kinematics of Parallel Mechanism
In the inverse solution, it is considered that the coordinates of the tool tip point \({\varvec{F}} = [F_{x} ,F_{y} ,F_{z} ]^{T}\) and the unit direction vector S of the end tool rod are known, and the purpose is to calculate the input of each actuator, i.e., h, l1, l2, α, β, which are the inputs of P3, P1, P2, C, B respectively.
Because the tool tip point coordinate F and the unit direction vector S are known, the coordinates can be easily obtained from the established coordinate system:
The expression of point G in the global frame O-XYZ and local frame o2-x2y2z2 can be obtained:
Then the input of P3 is Gz, that is: h = Gz.
As shown in Fig. 1, the angle \(\theta_{1}\) can be obtained by the coordinate relationship of point G in local frame o1-x1y1z1:
where \(\theta_{1}\) is the angle of ∠A2Go1, lG is the length of GA2.
As shown in Fig. 1, in the trapezoid \(GKa_{2} o_{2}\), ∠1 is known, o3a2 = \(b\), Go3 = \(k\), then through geometric relations, the length of \(GK\) and \(Ka_{2}\) can be calculated. In the triangle \(GKA_{2}\), according to the law of sine
where \(\theta_{2}\) is angle of ∠KA2G.
And the length of l2 can be calculated based on sine low:
After obtaining \(\theta_{1}\) and \(\theta_{2}\), the rotation angle \(\theta_{3}\) of the mechanism around the axis of R21 can be obtained. Then the point of \({}^{3}a_{i}\) (i = 1, 2) can be expressed in the local frame o1-x1y1z1.
where \(R(\theta_{3} )\) is the transformation matrix of local frame o3-x3y3z3 respect to local frame o1-x1y1z1, and \({}_{3}^{1} P\) is origin of local frame o3-x3y3z3 respect to local frame o1-x1y1z1, which can be gotten through the closed-loop vector.
The length of two limbs of the parallel part can be obtained:
Substituting the coordinates of points \(a_{11}\), \(a_{21}\), \(A_{1}\), and \(A_{2}\), the length of two limbs can be calculated.
3.2 Solving the Rotational Angles of the Serial Part
The unit direction vector of the hilt is S, S = (m, n, q)T, and set two rotating angles of the BC swing head in the local frame O-XYZ: α′ is the rotating angle around the x3 axis, and β′ is the rotating angle around the z4 axis. Then the angle α′ and angle β′ are:
Then through transformation matrix \({\varvec{R}}\left( {\theta_{3} } \right)\), the input angle α of head C and the input angle β of head B can be obtained.
3.3 Forward Kinematics Analysis
In the forward solution, the inputs of h, l1, l2, α and β are known. The purpose is to solve the coordinate \(F = \left[ {F_{x} ,F_{y} ,F_{z} } \right]^{T}\) of the tool tip point and the unit direction vector S of the hilt.
Because the length l2 is known, the length of lG can be obtained based on cosine law:
As shown in Fig. 2, in the quadrilateral A1A2a1a2, the length of four sides and \(\angle 2\) are known. According to the law of cosines, the length a1A1 and the angle of \(\angle a_{1} A_{2} a_{2}\) and \(\angle a_{1} A_{2} A_{1}\) can be calculated.
According to formula (7), the angle \(\theta_{2}\) can be obtained. Then the angle of \(\angle A_{1} A_{2} G\) and \(\theta_{3}\) can be obtained by Eq. (13).
The coordinate of G in the frame O-XYZ can be expressed:
And the input angles α and β are known, the unit direction vector S can be obtained by the rotation transformation matrix \(R\left( {\theta_{3} } \right)\).
Then the coordinates of the tool tip point F can be obtained.
4 Dimensional Optimization and Workspace Analysis
Taking the working space and driving force as optimization objective, the robot’s key dimensions are optimized. The parallel mechanism part is optimized as the main optimization object of the hybrid robot. Firstly, the parallel mechanism is determined based on the size of the BC swing head, and the size of its moving platform is 420 mm. Secondly, based on the limit of the drive joint, the change range of the PM’s limb is determined to be [390 mm, 760 mm], and the optimization range of the fixed platform’s size is [640 mm, 840 mm]. Under the action of external force F = [10 N, 10 N, 10 N, 10 N mm, 10 N mm, 10 N mm]T, finding the optimal size of the fixed platform through optimization. The flow chart of the optimization procedure is shown in Fig. 3. Table 1 lists the force and workspace indexes with different sizes of the fixed platform.

Flow chart of platform parameter scaling optimization
Finally, through comparison, it is determined that the fixed platform size of the parallel mechanism is 740 mm. Therefore, the key dimensions of the hybrid robot are shown in Table 2.
According to the dimensions given in Table 2, the Monte Carlo method is used to analyze the new workspace of the hybrid robot, and its dexterity space is shown in Fig. 4.

The workspace of the five-axis hybrid robot RPR/RP + RR + P
Through observation, the robot can translate in a large range in the Z direction, which is convenient for machining narrow and long parts. At the same time, due to the existence of the BC swing head, the flexibility of the robot end tool in the workspace can be ensured, which is convenient for machining various complex curved surfaces, holes, etc. Therefore, it can meet the machining workspace requirements of aluminum alloy parts with complex curved surfaces for new energy vehicles.
5 Simulation Verification of Inverse Kinematic Analysis
Based on the obtained dimensions of the hybrid robot RPR/RP + RR + P shown in Table 2. As shown in Fig. 5, the three-dimensional model of the hybrid robot RPR/RP + RR + P is designed.

Three-dimensional model of the hybrid robot
In ADAMS, a motion trajectory is given for the tool tip of the hybrid robot, as shown in Eq. (16).
After simulation, the lengths l1, l2, h, and angles α, β of the BC swing head can be measured. Then substituting the inputs into forward kinematics model, the coordinate curve of the tool tip can also be obtained again, as shown in Fig. 6. It can be found that the results are consistent with the values given by Eq. (16), indicating the kinematics analysis is correct.

The coordinates variation curve of end tip measured in the simulation model
6 Conclusions and Future Works
A new type of five-degree-of-freedom hybrid robot RPR/RP + RR + P is proposed for machining of aluminum alloy plates for new energy vehicles. The modified hybrid robot includes a two-degree-of-freedom parallel mechanism and two series parts, which are the translation along the limb A2a2 and the rotation around the axis of the R joint.
Through the screw theory, the degree of freedom of the robot is analyzed, and the result shows that the robot has five DOFs, and can achieve five-axis hybrid processing.
Through the geometric relationship, the forward and inverse position solutions of the hybrid robot are analyzed. Compared with the general hybrid robot, the forward and inverse position model are simple, thus the hybrid robot is easy to control.
Taking the limb driving forces and working space as the optimization objective, the dimensions of the mechanism is optimized, and the fixed platform size is determined to be 370 mm. After that, the working space of the robot is obtained by the Monte Carlo method, which is a cylindrical body with an approximate triangular section.
Finally, the three-dimensional model of the mechanism is also constructed through Solidworks software, and the forward and inverse kinematic models of the hybrid robot are verified by using the software ADAMS and MATLAB.
The force and stiffness analysis of the five-axis hybrid machining robot will be carried out in future work. And the prototype will be developed, the prototype experiments will be carried out.
References
Caccavale F, Siciliano B, Villani L (2003) The Tricept robot: dynamics and impedance control. IEEE/ASME Trans Mechatron 8(2):263–268
Neumann KE (2004) Next generation Tricept—a true revolution in parallel kinematics. In: Proceedings of the 4th Chemnitz parallel kinematics seminar, pp 591–594
Zhao YQ, Jin Y, Zhang J (2016) Kinetostatic modeling and analysis of an Exechon parallel kinematic machine (PKM) module. Chin J Mech Eng 29(1):33–44
Jin Y, Bi ZM, Liu HT et al (2015) Kinematic analysis and dimensional synthesis of Exechon parallel kinematic machine for large volume machining. J Mech Robot 7(4):041004
Huang T, Dong C, Liu H et al (2019) A simple and visually orientated approach for type synthesis of over-constrained 1T2R parallel mechanisms. Robotica 37(7):1161–1173
Huang T, Cheng LD, Liu H et al (2018) Five-degree-of-freedom hybrid robot with rotational supports. U.S. Patent, 17 Apr 2018
Li M, Huang T, Chetwynd DG et al (2006) Forward position analysis of the 3DOF module of the TriVariant: a 5DOF reconfigurable hybrid robot. J Mech Des 128(1):319–322
Wang YY, Huang T, Zhao XM et al (2007) Finite element analysis and comparison of two hybrid robots—the Tricept and the TriVariant. In: IEEE/RSJ international conference on intelligent robots and systems, pp 490–495
Liu XJ, Wang LP, Xie F, Bonev IA (2010) Design of a three-axis articulated tool head with parallel kinematics achieving desired motion/force transmission characteristics. ASME J Manuf Sci Eng 132(2):021009
Xie FG, Liu XJ, Wang JS (2012) A 3-DOF parallel manufacturing module and its kinematic optimization. Robot Comput Integr Manuf 28:334–343
Li QC, Hervé JM (2014) Type synthesis of 3-DOF RPR-equivalent parallel mechanisms. IEEE Trans Robot 30(6):1333–1343
Zhang DS, Xu YD, Yao JT, Zhao YS (2019) Analysis and optimization of a spatial parallel mechanism for a new 5-DOF hybrid serial-parallel manipulator. Chin J Mech Eng 31(1)
Xu YD, Zhang DS, Yao JT, Zhao Y (2017) Type synthesis of the 2R1T parallel mechanism with two continuous rotational axes and study on the principle of its motion decoupling. Mech Mach Theory 108:27–40
Xu Y, Yang F, Xu Z, Yao J, Zhou Y, Zhao Y (2020) TriRhino: a five-DOF hybrid serial-parallel manipulator with all rotating axes being continuous: stiffness analysis and experiments. ASME J Mech Robot 11:23
Yang Y, Wang LP (2005) Inverse dynamics analysis of a new type of parallel machine tool. Tool Technol 06:11–13
Wu J, Wang J, Wang L, Li T (2009) Dynamic and control of a planar 3-DOF parallel manipulator with actuation redundancy. Mech Mach Theory 44:835–849
Wang L, Wu J, Wang J, You Z (2009) An experimental study of a redundantly actuated parallel manipulator for a 5-DOF hybrid machine tool. IEEE/ASME Trans Mechatron 14(1):72–81
Acknowledgements
Supported by the National Natural Science Foundation of China (Grant No. 51875495), and the National Natural Science Foundation of China (Grant No. U2037202), and Hebei Science and Technology Project (Grant No. 206Z1805G).
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Ma, X. et al. (2023). Analysis of a Five-Degree-of-Freedom Hybrid Robot RPR/RP + RR + P. In: Liu, X. (eds) Advances in Mechanism, Machine Science and Engineering in China. CCMMS 2022. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-9398-5_20
Download citation
DOI: https://doi.org/10.1007/978-981-19-9398-5_20
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-9397-8
Online ISBN: 978-981-19-9398-5
eBook Packages: EngineeringEngineering (R0)