
Abstract
Only the electromagnetic force on the stator is applied when calculating the radiated noise of permanent magnet synchronous motor (PMSM) in the industry. And the influence of rotor excitation on the noise of PMSM is not considered. This paper studies the loading method of rotor excitation firstly. The centralized force is applied to the rotor which simplified with superelement. Secondly, the modal results of the motor assembly simplified with superelement are compared with the modal results of the motor assembly without simplified. The correctness of simplifying the rotor with the superelement is verified in this paper. Finally, the motor noise under three working conditions is calculated. The comparison results show that the rotor excitation has little effect on the main order noise of the PMSM. The reason why the rotor electromagnetic excitation is not considered when calculating motor noise in the industry is answered.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
At present, domestic and foreign scholars only consider the stator electromagnetic force [1,2,3,4,5] in the simulation of motor noise research, and there is little discussion on the motor noise caused by rotor electromagnetic force. The motor noise simulation considering rotor excitation has the following difficulties:
-
1.
Rotor modeling is difficult. The rotor core is laminated by silicon steel sheets and fits with the motor case interference. Its mechanical properties are very complex, which requires anisotropic materials [6]. During finite element modeling of inclined pole rotor core, it takes a lot of time to deal with the connection relationship between different rotor segments.
-
2.
The bearing connection parameters between rotor and motor case are not easy to obtain.
-
3.
Due to the instantaneous rotation characteristics of the rotor, the force on the rotor surface grid is complex when applying electromagnetic force, and the rotor also needs to be simplified.
Permanent magnet synchronous motor with 8 poles and 48 slots is widely used in electric vehicles. The main order noise of the motor with this pole slot ratio is 8th order and 48th order, and the 48th order noise is the main noise source [7]. In this paper, the order noise of a permanent magnet synchronous motor considering rotor excitation is carried out.
2 Simulation of Order Noise of PMSM Excited by Rotor Electromagnetic Force
Since the rotor is rotating when working, it is difficult to apply a spatial rotating electromagnetic force with the finite element method. One of the solutions is to reduce the rotor with superelement to several ASET points. Then calculate the resultant force of the rotor and load the resultant force onto the ASET points. The modal results of the whole motor reduced with superelement is carried out and compared with the modal results of the motor assembly without simplified. The evaluation standard is that the modal frequency difference of these two motor assembly is no more than 10%.
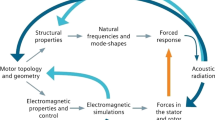
The original finite element model of the rotor has been corrected with the modal test results. Then simplify the rotor model with superelement. The center point of each skew pole of the rotor is defined as the action point of the rotor electromagnetic force. The rotor excitation is loaded at this position. Combine the rotor model simplified with superelement with the stator, case and other components to form the motor assembly model. The radiated noise of the motor is calculated after the distributed force of the stator and the concentrated force of the rotor are applied to this model. The parameters of the permanent magnet synchronous motor used in this paper are shown in Table 1, and the calculation process of motor noise considering rotor excitation is shown in Fig. 1.

Calculation process of motor noise considering rotor excitation
3 Superelement Reduction of Rotor
The whole rotor model is simplified to 6 ASET points. Two of them are connection points between rotor bearing and motor case. The other 4 ASET points are center points of skew poles of rotor. Connect each ASET point with the middle circle node of the outermost grid of the bearing or rotor skew pole with the constant section bending beam element (CBAR element). The CBAR element parameters are shown in Table 2. The schematic diagram of the 6 ASET points of rotor is shown in Fig. 2. Point 1 and point 6 are the connection points between the rotor bearing and the motor case, and point 2 to 5 are the center points of the 4 skew poles of the rotor.

Six ASET points of rotor superelement
① The connection point between rotor bearing and motor case (2 points in total), and the ASET point of rotor bearing is shown in Fig. 3.
② The center point of each skew pole of the rotor, which will be used as the action point of rotor excitation (4 points in total). The ASET point of the skew pole of the rotor is shown in Fig. 4.

ASET point of rotor bearing

ASET point of skew pole
4 Modal Calculation of Motor Assembly
In the process of motor development, the modal natural frequencies of single body state and assembly state are calculated respectively, which can better clarify the main reasons for the change of component natural frequency, and it is also easy to judge the cause of the problem. When the rotor is assembled to the motor case, it is mainly affected by the bearing stiffness of the rotor. In this paper, the bearing is simplified as a spring stiffness element (CBUSH element). Table 3 shows CBUSH element parameters, which are calculated by simulation software, and the finite element model of motor assembly is shown in Fig. 5.
In actual bench noise test, the motor case is connected with the flange of the motor bench with 5 bolts. When calculating the modal frequency of the motor, it is consistent with the actual installation state, and the 5 bolt connection points need to be fully constrained.

The finite element model of motor assembly
The MSC Nastran SOL 103 solver is used to calculate the modal frequencies of the two models(the motor model simplified with superelement and the model without simplified). Then extract the frequency and modal shape of each order. Table 4 shows comparison of modal results between motor assembly simplified with superelement and motor assembly without simplified. Due to space constraints, only the first 4 modes and the last 3 modes within 8000 Hz are listed.
Due to the poor visualization of the rotor model after superelement simplification, the modal results of motor assembly simplified with superelement can be mapped to the model without simplified when viewing the modal results. The motor case can hide for observation when viewing the local modes.
It can be seen that the number of modes of the two models is only 3 orders different within 8000 Hz from Table 4, and the different modes are the breathing modes of the rotor itself. During the superelement modeling, ASET points are connected with the rotor surface grid with CBAR element, which strengthens the stiffness of the rotor. As a result, these three modes frequency become bigger. The CBAR element can be replaced by the weighted average constraint element (rbe3 element) in the follow-up study. Except for these three modes, the difference of other modal frequencies is less than 6%, which verifies the accuracy of reducing the rotor model by superelement method.
5 Method of Electromagnetic Force Application
The skew pole (four symmetrical skew poles) should be considered when applying the stator electromagnetic force, which corresponds to the actual working condition. The mapping structure nodes of the stator are shown in Fig. 6, and the grids are divided into four equal parts. P1 represents the stator electromagnetic force of the first skew pole and P2 represents the stator electromagnetic force of the second skew pole. Due to the symmetrical skew pole structure, P4 is equal to P1 and P3 is equal to P2.
The force used in this paper is the electromagnetic force under sinusoidal current. The influence of inverter power supply on the noise of PMSM is mainly the switching noise [8]. This paper mainly analyses the 8th, 24th and 48th order noise of the motor. So the influence of inverter power supply on the noise of PMSM can be ignored.
The rotor electromagnetic force acts on the ASET points. The resultant force of rotor with a skew pole length is applied in X direction and Y direction respectively. Z direction is the axial direction of the motor without electromagnetic force. The rotor force application diagram (ASET points) is shown in Fig. 7. R1x represents X-direction electromagnetic force of the first skew pole, R1y represents Y-direction electromagnetic force of the first skew pole, and so on. Due to the symmetrical skew pole structure, R4X is equal to R1x, R3x is equal to R2x, R4y is equal to R1y, and R3y is equal to R2y.

Mapping nodes of motor stator force

Motor rotor force application (ASET points)
6 Simulation of Motor Noise Considering Rotor Excitation
The acoustic module in Virtual.Lab software is used to calculate the motor radiated noise. The cut-off modal frequency of the motor is 8000 Hz, which is about 1.25 times of the analysis frequency. The acoustic mesh of the motor assembly is shown in Fig. 8. The cut-off frequency of the acoustic transfer vector (ATV) is 8000 Hz. The field points of the motor assembly are shown in Fig. 9. The field points are one meter away from the motor surface. The calculation conditions are shown in Table 5.

Acoustic mesh of motor assembly

Field points of motor assembly
When solving the motor noise under each working condition, firstly, the modal results of the motor assembly simplified with superelement are imported into Virtural. Lab software. After loading the electromagnetic force, the modal superposition method is used to solve the forced response of motor (modal participation factor). Finally, the radiated noise of the motor is obtained from the obtained ATV and modal participation factor. The simulation results of motor radiated noise of 6000 r/min are shown in Fig. 10, and the results of 8000 r/min are shown in Fig. 11.

Simulation results of motor radiated noise of 6000 r/min

Simulation results of motor radiated noise of 8000 r/min
The simulation results under the two speed conditions show that the motor noise under the condition of considering the stator electromagnetic force only is equivalent to the noise calculation results considering both the rotor and stator electromagnetic force. The noise under the condition of considering the rotor electromagnetic force only is the smallest, and the difference with the other two conditions is more than 10 dB(A).
The difference of the 8th order noise between three conditions is slightly larger than that of 24th order noise and 48th order noise. The difference of order 8 at the right field point of 8000 r/min is 6.2 dB(A), which is due to the consideration of rotor static eccentricity in the calculation of electromagnetic force. Rotor static eccentricity has a great impact on the noise of low order [9, 10]. The difference of the 24th order noise between three conditions is about 0.5 dB(A). So as the 48th order noise. There is no difference in four point average noise (energy average). The reason for the large 8th order difference at the right point of 8000 r/min is that the noise value of this field point is smaller than the other three field points, which is equivalent to the motor noise under the condition of considering the rotor electromagnetic force only. The noise at this point is greatly affected by the rotor force, but it has little contribution to the average noise of the four field points, so the difference can be ignored.
7 Conclusion
-
1.
The modal results of the motor with rotor reduced by superelement are consistent with modal results of original motor assembly. So the rotor can be simplified by modal reduction method, which also provide act points for the rotor electromagnetic force. Furthermore, the feasibility of the electromagnetic force application method of rotor proposed in this paper is verified.
-
2.
The rotor electromagnetic force has some impact on the low-order noise of the motor. However, the noise amplitude considering the rotor electromagnetic force alone is small, which is more than 10 dB(A) lower than the noise considering the stator electromagnetic force only. So the impact can be ignored.
-
3.
Rotor electromagnetic force has little effect on high-order noise of PMSM.
In general, the rotor electromagnetic force has little influence on the main order noise of the motor, which demonstrates the effectiveness of the method of not considering the rotor electromagnetic force when calculating the motor noise in the industry. The rotor electromagnetic force can be ignored in the subsequent calculation of motor noise, which can greatly save the time spend on finite element modeling and noise calculation. It also can shorten the product development period.
References
Rakib, I., Irbil, H.: Analytical model for predicting noise and vibration in permanent magnet synchronous motors. IEEE Trans. Ind. Appl. 46(6), 2346–2354 (2010)
Sun, T., Kim, J., Lee, G., et al.: Effect of pole and slot combination on noise and vibration in permanent magnet synchronous motor. IEEE Transactions on magnetics 47(5), 1038–1041 (2011)
Wang, D., Zhu, C., Fu, J.: Electromagnetically excited vibration analysis for an asynchronous electrical machine with finite element method. J. Vibration Shock 31(2), 140–144 (2012)
Yue, D., Xia, H., Gao, H.: Simulation analysis on electromagnetic noise of electric vehicle drive motor, Noise and Vibration Control A01, 175–180 (2018)
Zhu, L.H., Wang, B., Yan, R.G., et al.: Electromagnetic vibration of motor core including magnetostriction under different rotation speeds. IEEE Transactions on Magnetics 52(3),1–4 (2016)
Zhao, J., Wang, S.: A constitutive law based on transverse isotropic hypothesis and finite element model of fixed joints. China Mechanical Eng. 27(8), 1007–1011 (2016)
Chen, Y., Zhu, Z., Ying, S.: Analysis and control of motor noise.Zhejiang University Press, Hangzhou 20–211 (1987)
Tang, R., Song, Z., Yu, S., et al.: Study on source of vibration and acoustic noise of permanent magnet machines by inverter. Electric Machines Control 14(3), 12–17 (2010)
Yang, H., Chen, Y.: Influence of radial force harmonics with low mode number on electromagnetic vibration of PMSM. IEEE Trans. Energy Convers. 29(1), 38–45 (2014)
Zuo, S., Zhang, Y.: A constitutive law based on transverse isotropic hypothesis and finite element model of fixed joints. Mechatronics 6 38–45 (2017)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Hui, C., Wenbo, N., Longyou, G., Lechao, T., Shoulun, G. (2023). Effect of Rotor Excitation on Order Noise of Permanent Magnet Synchronous Motor. In: Proceedings of China SAE Congress 2021: Selected Papers. Lecture Notes in Electrical Engineering, vol 818. Springer, Singapore. https://doi.org/10.1007/978-981-19-3842-9_28
Download citation
DOI: https://doi.org/10.1007/978-981-19-3842-9_28
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-3841-2
Online ISBN: 978-981-19-3842-9
eBook Packages: EngineeringEngineering (R0)