
Abstract
Compared with BeiDou satellites, low earth orbit (LEO) satellites travel faster and show greater changes in spatial geometry within the same duration. When they are served as navigation satellites and assist BDS precise point positioning (PPP), fast initialization can be realized. Usually, the geometry of a constellation is represented by the geometric dilution of precision (GDOP). However, traditional GDOP metric can only reflect the instantaneous positioning accuracy of standard navigation and positioning service rather than the convergence performance of PPP, and cannot be calculated when the number of instantaneous visible satellites is less than 4. Considering that the coverage fold of future LEO navigation-augmentation constellation may be below 4 and meanwhile it is meaningful to comprehensively describe the continuous impacts of satellite numbers, moving velocity, moving direction and geometric change level on the convergence process of PPP, the concept of equivalent GDOP (EGDOP) based on accumulated time is proposed. Then, thousands of LEO constellations and their observation data are simulated and used for the analysis of the relationship between the EGDOP of LEO constellation and the convergence time of LEO-augmented BDS PPP. The results show that for 1-min sessions the smaller the EGDOP, the shorter the convergence time and the higher the probability that PPP converge within 1 min. Under ideal ephemeris conditions, the probabilities of realizing fast PPP with the horizontal positioning accuracy better than 10 cm and convergence time below 1 min are 100%, 95% and 65% when the corresponding EGDOP are below 0.29, 0.30 and 0.51, respectively. The relevant results can be used as an important basis for the optimization design of future LEO navigation-augmentation constellations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
With the completion of the global networking of BDS-3, the BeiDou satellite navigation has officially entered a new age of global development. In order to continuously improve service performance and system competitiveness, China is expected to build a more ubiquitous, integrated and intelligent system, i.e., the national comprehensive positioning, navigation, and timing (PNT) system, with BDS as the core by 2035, and the global navigation-augmentation system based on the low earth orbit (LEO) constellation is an important means to realize the system capability [1,2,3].
With advantages such as rapid geometric changes, strong signal power, and global space-based monitoring coverage, LEO constellation can complement the BeiDou constellation and comprehensively improve its performance [4]. A typical contribution is to significantly improve the convergence performance of precise point positioning (PPP), because compared with BeiDou satellites in medium and high orbits, the geometry of LEO constellation changes greatly within the same duration, which makes it easier to quickly separate the carrier-phase ambiguity parameters from the position parameters. Based on meticulously simulated observations, different scales of LEO constellations-augmented BDS, GPS and multi-GNSS were evaluated and demonstrated [5,6,7], and the results showed that the convergence time of PPP could be significantly shortened from 15–30 min to 2–3 min or even less than 1 min. Besides, the improvement of convergence speed was found to be related to the number of visible LEO satellites.
Owing to the important advantages of fast convergence and high precision, together with the characteristics of strong signal, high safety and low cost, LEO navigation augmentation is favored by real-time high-precision fields such as automatic driving. In 2019, Xona Space Systems of the US proposed to build a LEO navigation system composed of 300 satellites called Pulsar to meet the navigation demands in the challenging environment in the era of autonomous driving, and the first satellite will be launched in mid-2022 [8]. GeeSpace Company which belongs to Zhejiang Geely Holding Group aimed at future travel and also started to layout a 168-satellite LEO navigation-augmentation constellation [9]. Hence, two questions follow: First, what is the expected performance of PPP convergence for these constellations? Second, how to consider the requirements of rapid and precise positioning in the optimal design of a LEO constellation? Although the number of visible LEO satellites can reflect the expected convergence performance to a certain extent, and in the meanwhile, some LEO navigation-augmentation constellations are also optimized using a genetic algorithm with its objective function of more visible satellites and more uniform global coverage [10, 11], the convergence performance may also be affected by other factors like different velocities, moving directions and distributions of the satellites [12].
To comprehensively describe the continuous impacts of satellite numbers, moving velocity, moving direction and geometric change level on the convergence process of PPP, the concept of equivalent GDOP (EGDOP) based on accumulated time is first proposed. Then, thousands of LEO constellations and their observation data are simulated and used for the establishment of the relationship between the EGDOP of LEO constellation and the convergence time of LEO-augmented BDS PPP. The relevant results provide an important basis for the optimization design of global LEO navigation-augmentation constellations, and a means to predict the augmentation performance of a particular LEO constellation.
2 Method
2.1 Standard GDOP
Standard GDOP is usually calculated according to the precision factor matrix which is derived from the design matrix of observational equations of standard point positioning (SPP). Assuming that the number of instantaneous visible satellites at epoch \(k\) at a user station is \(q\left( {q \ge 4} \right)\), the design matrix \({\mathbf{H}}^{k}\) is given as:
where \(l\), \(m\) and \(q\) are direction cosine parameters corresponding to east, north and up components, respectively. Then, the standard GDOP is defined as:
It takes the number of visible satellites and the geometric distribution of satellites into account, and can characterize the instantaneous accuracy of SPP, but does not consider the satellite velocity, moving direction and the continuous change extent of geometry during initialization, thus cannot reflect PPP convergence performance. Furthermore, it cannot be calculated if less than four satellites are instantaneously observed.
2.2 EGDOP
To reflect the spatial geometry changes during positioning initialization period, a new concept of EGDOP based on accumulated time is proposed in this paper.

Geometric change of a constellation during the initialization period of positioning
Figure 1 shows the crossed trajectories of two satellites within duration \(S\). From \(t = 0\), sample a point on each trajectory at a time interval of \(\tau\), thus at most \(\left\lceil {S\left| \tau \right.} \right\rceil\) points are obtained where \(\left\lceil \cdot \right\rceil\) is the ceil rounding operator. The lines that connect the station with all sampled points in all trajectories form the spatial geometry. This kind of geometric metric is defined as EGDOP and written as \({\text{EGDOP}}_{S\left| \tau \right.}\) where \(S\) and \(\tau\) are in seconds. Note that the \(\tau\) directly affects the number of satellite-to-receiver connections, thereby affecting the \({\text{EGDOP}}_{S\left| \tau \right.}\). For an already short time interval \(\tau\), it is assumed that the more densely sampled points, i.e., the same color in one trajectory, formed due to a shorter interval of \({\tau \mathord{\left/ {\vphantom {\tau n}} \right. \kern-\nulldelimiterspace} n}\left( {n \ge 1} \right)\) shares the same location. Then, the relationship between \({\text{EGDOP}}_{S\left| \tau \right.}\) and \({\text{EGDOP}}_{{S\left| {\left( {{\tau \mathord{\left/ {\vphantom {\tau n}} \right. \kern-\nulldelimiterspace} n}} \right)} \right.}}\) can be derived as follows.
For a sampling process with duration \(S\) and interval \(\tau\), the design matrix is:
where the superscript and subscript of \({\mathbf{H}}\) represent the epoch number and time, respectively. Then, we have:
If the sampling interval becomes \({\tau \mathord{\left/ {\vphantom {\tau n}} \right. \kern-\nulldelimiterspace} n}\), we have:

Finally, the EGDOP can be calculated as:
3 Data Simulation and Processing Strategy
3.1 Constellation Simulation
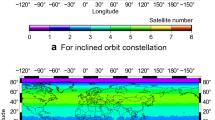
To obtain the statistical law between the EGDOP and the convergence time of LEO-augmented BDS PPP, a total of 1,692 LEO Walker constellations with different numbers of satellites, numbers of orbital planes, orbital altitudes and orbital inclinations, are designed for analysis. The detailed configurations are shown in Table 1.
The theoretical orbits and clocks used for observation simulation and precise products used for PPP test are simulated according to literature [13]. For precise products of BeiDou satellites, the average 1D orbit error is 2.1 cm and the clock error is 0.1 ns. To better explain that the differences in convergence time of LEO-augmented BDS PPP are only caused by constellation configurations rather than ephemeris errors, LEO satellites directly use the theoretical orbits and clocks for PPP test.
3.2 Observation Simulation
The main process of observation simulation is as follows: Firstly, simulate the geometric distance between receiver location at the exact time when signal received and satellite position at the exact time when signal transmitted through multiple iterations. Then, add satellite clock offset, receiver clock offset, ionospheric delay, tropospheric delay, hardware delay and carrier-phase ambiguity parameter to this geometric distance. Finally, bring the pseudorange and carrier-phase observation noises in. For detailed simulation process, please refer to literature [13].
To better explain that the differences in convergence time of LEO-augmented BDS PPP are only caused by constellation themselves rather than biases in receiver or time delays in signal propagation. Only one station named SIN1 located in low-latitude region (103.68°E, 1.34°N) is selected for analysis. BDS+LEO dual-frequency observations with 5-s sampling interval from 00:00:00 to 00:29:55 on September 6, 2020 are simulated. The observation noises of pseudorange and carrier-phase in the zenith direction are set as 0.3 m and 3 mm, respectively, and both BDS and LEO are assumed to transmit B1I and B3I signals.
3.3 Processing Strategy
The detailed EGDOP calculation and PPP processing strategies are shown in Table 2. Note that since we focus on the gain brought by the LEO constellation, only LEO constellation itself has been considered in the EGDOP calculation.
4 Results and Analyses
Since previous studies generally focused only on the relationship between the number of visible LEO satellites and convergence augmentation, this section first preliminarily verifies that the convergence time of LEO-augmented BDS PPP is not only related to the number of visible LEO satellites.
The comparisons of two LEO constellation schemes with the same scale but different orbital altitudes and inclinations are given in Table 3. In the meanwhile, as shown in Fig. 2, it is found that the average number of visible satellites of these two schemes are almost the same at station SIN1, this is because though the orbital altitude of scheme 1 (s1) is lower than that of scheme 2 (s2), which means the coverage for a single satellite is smaller, but the lower inclinations has contributed better satellite visibility in mid-low regions. However, as shown in Fig. 3, the convergence time of BDS PPP augmented by these two schemes is significantly different, which is 0.5 min and 1.3 min for s1 and s2, respectively. The convergence time of PPP is defined as the time required to ensure that the positioning errors in both east and north components are less than 0.1 m and maintain for at least 5 min. After analysis, three reasons may account for this. First, the orbital altitude of s1 is lower, so the satellites move faster relative to the ground, streak longer trajectories in unit time, and the spatial geometry will change more. Second, during the period from 00:00:00 to 00:00:55, the satellite distribution of s1 itself is better. As shown in Fig. 2, basically, LEO satellites of s1 are distributed in all directions. In terms of elevation angle, there are both high-elevation observations above 75° and low-elevation observations around 15°. Third, the moving directions of satellites in s1 are staggered, including both the movement from southwest to northeast and the movement from northwest to southeast, which is beneficial to the improvement of geometric conditions in all directions, while in s2 the movement is basically from southeast to northwest, which is relatively single.

Comparison of the 1-min skyplots for different LEO constellations-augmented BDS

Time series of positioning errors for PPP in east, north and up components
To comprehensively describe the effects of multiple factors, the EGDOP values with the accumulated time of 1 min including \({\text{EGDOP}}_{60\left| 5 \right.}\) and \({\text{EGDOP}}_{60\left| 1 \right.}\) are calculated. It is found that the \({\text{EGDOP}}_{60\left| 5 \right.}\) are 0.51 and 0.68 for the s1 and s2, respectively, which indicates that the geometric change for the s1 is more significant. Additionally, compared \({\text{EGDOP}}_{60\left| 5 \right.}\) with \({\text{EGDOP}}_{60\left| 1 \right.}\) for the same scheme, it is found that \({\text{EGDOP}}_{60\left| 5 \right.}\) is exactly \(\sqrt 5\) times as much as \({\text{EGDOP}}_{60\left| 1 \right.}\), which has effectively proven the correctness of the derivation of Eq. (6). This is meaningful as the number of sampling points used for EGDOP calculation can be properly reduced so that the computational efficiency can be increased in the process of constellation optimization.
In addition, to clearly show the difference in PPP convergence while adopting different strategies, only the first 8-min time series of positioning errors is given. The unabridged positioning results show that the convergence time of BDS PPP can be shortened from 14.0 min to 0.5 and 1.3 min with the augmentation of LEO constellation of s1 and s2, respectively. The corresponding promotion is 96.4% and 90.7%.
To obtain the statistical results between the EGDOP of LEO constellation and the convergence time of LEO-augmented BDS PPP, all 1,692 LEO constellation schemes are analyzed in this section. As shown in Fig. 4, the colors reflect the number of repeated results, and the redder the color, the denser the results. Note that the scopes of the color map of the upper, middle and bottom subgraphs are different. It can be seen that the scattered points in each subgraph are radially distributed. The smaller the EGDOP of LEO constellation, the shorter the PPP convergence time and the denser the scattered points, otherwise, the longer the convergence time, the more dispersive the scattered points and the more uncertain the results.

EGDOP values of all LEO constellations and the corresponding convergence time of LEO-augmented BDS PPP
If someone expects the convergence time to be \(S\), only the EGDOP during accumulated time \(S\) needs to be concerned about. As for these three subgraphs in Fig. 4, we build the relationships between the probabilities of successful PPP convergence within 30, 60 and 120 s and the EGDOP values during the same accumulated time, i.e., \({\text{EGDOP}}_{30\left| 5 \right.}\), \({\text{EGDOP}}_{60\left| 5 \right.}\) and \({\text{EGDOP}}_{120\left| 5 \right.}\). As shown in Fig. 5, the dotted lines represent the smoothed values. Considering that the amount of data is not enough to obtain a statistical result when the EGDOP is large for each subgraph. Therefore, we only consider the effective data with the \({\text{EGDOP}}_{30\left| 5 \right.}\), \({\text{EGDOP}}_{60\left| 5 \right.}\) and \({\text{EGDOP}}_{120\left| 5 \right.}\) values below 0.6, 0.8 and 1.0, respectively. Moreover, as the solid lines shown in Fig. 5, the functional relationship is obtained by fitting the smoothed values:

Relationship between the probability of PPP convergence and the corresponding EGDOP of LEO constellation
Therefore, when the EGDOP of 1-min accumulated time is less than 0.29, 0.30 and 0.51, the rapid PPP convergence within 1 min can be guaranteed with a probability of 100%, 95% and 65%, respectively.
5 Conclusions
To comprehensively describe the continuous impacts of satellite numbers, moving velocity, moving direction and geometric change level on the convergence process of PPP, the concept of EGDOP based on accumulated time is first proposed. This metric can reflect the spatial geometry changes over a period of time, and its value is related to the accumulated time and sampling interval. The longer the accumulated time and the shorter the sampling interval, the smaller the value. Therefore, the conversion relationship between EGDOP values of different sampling intervals is derived. The result shows that in the case of a short sampling interval, if the number of sampling points increases by \(n\) times, the EGDOP will decrease by a factor of \(\sqrt n\).
Then, a total of 1,692 LEO constellations and their observation data are simulated and used for the analysis of the relationship between the EGDOP of LEO constellation and the convergence time of LEO-augmented BDS PPP. The results show that for 1-min sessions with a sampling interval of 5 s, the smaller the EGDOP, the shorter the convergence time and the higher the probability that PPP converge within 1 min. Under ideal ephemeris conditions, the probabilities of realizing fast PPP with the horizontal positioning accuracy better than 10 cm and convergence time below 1 min are 100%, 95% and 65% when the corresponding EGDOP are below 0.29, 0.30 and 0.51, respectively.
Future research will be devoted to the optimal design of LEO navigation-augmentation constellation based on the minimum EGDOP value.
References
Yang, Y.: Concepts of comprehensive PNT and related key technologies. Acta. Geod. Cartogr. Sin. 45(5), 505–510 (2016)
Guo, S., Liu, C., Gao, W., et al.: Construction and development of satellite navigation augmentation systems. GNSS World China 44(2), 1–12 (2019)
Wang, L., Chen, R., Li, D., et al.: Initial assessment of the LEO based navigation signal augmentation system from Luojia-1A satellite. Sensors 18(11), 3919 (2019)
Zhang, X., Ma, F.: Review of the development of LEO navigation-augmented GNSS. Acta. Geod. Cartogr. Sin. 48(9), 1073–1087 (2019)
Ge, H., Li, B., Ge, M., et al.: Initial assessment of precise point positioning with LEO enhanced global navigation satellite systems (LeGNSS). Remote Sens. 10(7), 984 (2018)
Li, X., et al.: LEO constellation-augmented multi-GNSS for rapid PPP convergence. J. Geodesy 93(5), 749–764 (2018)
Su, M., Su, X., Zhao, Q., et al.: BeiDou augmented navigation from low earth orbit satellites. Sensors 19(1), 198 (2019)
Xona Space. http://www.xonaspace.com/pr20210921. Accessed 04 Feb 2022
GeeSpace. http://www.geespace.com/. Accessed 04 Feb 2022
Ma, F., et al.: Hybrid constellation design using a genetic algorithm for a LEO-based navigation augmentation system. GPS Solut. 24(2), 1–14 (2020)
Guan, M., Xu, T., Gao, F., et al.: Optimal Walker constellation design of LEO-based global navigation and augmentation system. Remote Sens. 12(11), 1845 (2020)
Su, H.: Precise orbit determination of global navigation satellite system of second generation (GNSS-2). Ph.D. thesis. University FAF Munich, Neubiberg (2000)
Ma, F.: Research on constellation optimization and signal frequency design for a LEO-based navigation augmentation system. Ph.D. thesis, Wuhan University, Wuhan (2021)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 Aerospace Information Research Institute
About this paper

Cite this paper
Ma, F. et al. (2022). Study on the Relationship Between the Equivalent GDOP and the Convergence Time of LEO-Augmented BDS PPP. In: Yang, C., Xie, J. (eds) China Satellite Navigation Conference (CSNC 2022) Proceedings. CSNC 2022. Lecture Notes in Electrical Engineering, vol 909. Springer, Singapore. https://doi.org/10.1007/978-981-19-2580-1_21
Download citation
DOI: https://doi.org/10.1007/978-981-19-2580-1_21
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-2579-5
Online ISBN: 978-981-19-2580-1
eBook Packages: EngineeringEngineering (R0)