
Abstract
The steer-by-wire (SbW) technology enables to facilitate better steering control as it is based on an electronic control technique. The importance of this technology lies in replacing the traditional mechanical connections with steering auxiliary motors and electronic control and sensing units as these systems are of paramount importance with new electric vehicles. Then, this research paper discusses some difficulties and challenges that exist in this area and overcomes them by presenting some results. These results meet the SbW’s robust performance requirements and compensate oscillations from the moving part of the steering rack in the closed-loop system model: modeling, analysis and design. Thus, the issue of robust control for nonlinear systems with disturbances is addressed here. Finally, the results are validated through detailed simulations.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The auto industry has implemented many modern and advanced systems in an attempt to raise the quality of driving, especially in off-road, as well as increase the safety and comfort of users of these vehicles [11, 13, 17]. Parallel to these developments, we see a significant shift from classical to modern systems [9] and SbW is another very promising application in terms of practicality, safety, and functionality [4, 14]. For that reason, several automobile manufacturers have introduced SbW systems in vehicles to improve operational efficiency and fuel economy [3, 8, 19, 24, 36]. Then, SbW is a technology that replaces the traditional systems for steering with electronic controllers [7, 10, 18, 20, 31, 32]. This technique enables to facilitate better steering control as it is based on what we call electronic control [12, 15, 27].
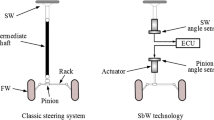
The primary objective of these vehicles is to obtain control capabilities that are not mechanically related to the vehicle’s engine, but are sensed through advanced devices and transmitted by electrical signals based on effective mechanisms [26]. Then, the accuracy, performance and efficiency of the machinery in these vehicles is directly related to the positioning systems on roads and tracks [16, 22] where DC motors are often used in this case. The steering wheel (SW) rotation is transmitted in the classic steering system through an intermediate shaft that is connected via the rack/pinion torque to front wheels (FWs) [38]. In SbW technology, the main component, the intermediate element, is dispensed and in turn many modern sensors and efficient actuators are connected to the SW and FW parts [30]. Then, the dynamic model obtained for this technology represents the close relationship between the current steering mechanism, the electrodynamics of the DC motor, and the torque of the rack/pinion part as shown in Fig. 1 [18, 23].

Schematically model of SbW.
Finally, this paper discusses the robust control problem using a technology called SbW. The primary objective of the considered strategy is to maintain stability, traceability and resistance to interference under complex working and road conditions. A novel scheme is developed here for modern vehicles that is equipped with the active steering system under consideration to cope well with difficult and varied road conditions. Then, in this research paper we discuss difficulties and challenges that exist in this area and give some results to overcome them. These results meet the SbW’s robust performance requirements and compensate oscillations from the moving part of the steering rack. Finally, the obtained graphs are presented to see the achieved high performance, the resulting strong stability, and the durability that this type of system requires.
2 Modeling and Problem Statement
Based on the great development of vehicles production, it has become urgent to rely on SbW auto technology in order to replace the traditional parts with new technologies. The FW rotation satisfies the following dynamic equation [2]:
where
-
J is the DC motor inertia moment;
-
\(B_{w}\) is the constant DC motor viscous friction;
-
\(\delta _{f}\) is the FW steering angle;
-
\(\tau _{a}\) is the self-aligning torque;
-
\(\tau _{m}\) is the DC motor torque;
-
\(F_{c}\) is the constant Coulomb friction;
-
\(F_{c}sign(\dot{\delta }_{f})\) is the Coulomb friction in the steering system.
During a handling maneuver, the forces acting on the FW and rear wheel (RW) is illustrated in Fig. 2 (bicycle model [1, 2]). Also, the pneumatic trail is the distance between the center of the tire and where the lateral force is applied as shown in the same figure.

Bicycle model.
The equations to calculate the both torque are given at small sideslip angles (approximately less than \(6^{o}\)) by (2) [20, 23, 30].
where
-
\(F^{y}_{F}\) is the FW lateral force;
-
\(F^{y}_{R}\) is the RW lateral force;
-
\(F^{x}_{F}\) is the FW longitudinal force;
-
\(F^{x}_{R}\) is the RW longitudinal force;
-
v is the vehicle velocity at the center of gravity (CoG);
-
\(v^{w}_{F}\) is the FW velocity;
-
\(v^{w}_{R}\) is the RW velocity;
-
\(C^{\alpha }_{F}\) is the FW cornering coefficient;
-
\(C^{\alpha }_{R}\) is the RW cornering coefficient;
-
\(\alpha _{F}\) is the FW sideslip angle;
-
\(\alpha _{R}\) is the RW sideslip angle;
-
\(t_{p}\) is the pneumatic trail;
-
\(t_{m}\) is the mechanical trail;
-
\(k_{m}\) is the constant DC motor;
-
\(i_{m}\) is the armature current.
Also, the sideslip angles of the FW and RW are given by the Eq. (3) [5, 20, 35].
where
-
\(\beta \) is the vehicle sideslip angle;
-
r is the yaw rate at the CoG;
-
a is the FW distance from the vehicle CoG;
-
b is the RW distance from the vehicle CoG.
On the other side, the yaw rate dynamics at the CoG and the dynamics of the sideslip angle are:
where
-
m is the vehicle mass;
-
\(I_z\) is the vehicle inertia moment.
Using (2), (3), (1), and (4), we have:
Remark 1
The new wire-based steering system, that dispenses with the mechanical column between the handwheel and front wheels and replaces it by modern devices, incorporates various types of non-linearity and disturbances, such as Coulomb friction, tyre self-aligning torque and so on [6]. Then, the SbW auto systems show considerable advantages over conventional steering arrangements; however there are also a number of limitations. For this reason, a controller is developed and presented in this paper to ensure the reliability and the robustness of these systems [21, 28, 29, 33, 34].
Remark 2
In the implementation of the vehicles control technique that are equipped with the active steering system SbW, due to the fact that the actual steering angle is generated via the front wheel steering motor, the steering controller drive the actual steering angle to exactly track the reference angle provided by the yaw control [25, 37].
Figure 3 gives an overview of a simplified DC motor circuit and a rotor mechanical model [23].

DC motor sub-system model.
Then, the electrical circuit mathematical model is expressed by the Eq. (6) using \(V_{f}=K_{f}\dot{\delta }_{f}\).
where
-
\(V_{f}\) is the electromotive force;
-
\(K_{f}\) is the electromotive force constant;
-
L is the armature inductance;
-
R is the armature resistance;
-
\(V_{m}\) is the voltage at the armature terminals.
Combining the Eqs. (5) and (6) in a state-space form, a dynamics system model for steering is obtained and presented in the following equations:
where
Remark 3
Considering the necessity for a reliable motor, an effective way to model the friction of the DC motor is determined in this paper. Then, basic and main friction models are derived and a mathematical model that is linear of the DC motor is generated using Newton’s mechanics.
3 Main Results
Now, some results are given to illustrate the applicability of the proposed approach. Then, the parameters of the SbW model are listed in Table 1 where \(u_{0}=V_m=12~V\).
Graphically, to note the developments resulting from the proposed approach, Figs. 5 and 6 provide a clear view of the evolution of the state and input variables. On the other side, the disturbance used in these simulations is given in Fig. 4.

Disturbance used in the simulations.

Evolution of the state and input variables (a).

Evolution of the state variables (b).
Based on the above, the control technique that is presented exhibits good steering performance and excellent stability, and behaves with strong force against parameter changes and external varying road disturbance. Also, the simulations show that the Coulomb friction model gives strong results compared to the viscous friction model. Then, the adopted controller has the ability to track the vehicle’s movement path under the successive disturbances of the road, in terms of steering angle tracking.
Finally, the simulation results give a clear view that the FW angle can be convergent to the reference angle in SW ideally and quickly with SbW technology despite significant perturbations.
Remark 4
The effectiveness of the proposed method is verified using these results. Despite the excellent and great work that has been done to develop this technology, there are several important things to consider in this regard that will be touched upon in upcoming works.
4 Conclusion
Vehicles based on SbW technology are able to provide a more comfortable and safer driving by performing the primary function of isolating occupants from off-road conditions. SbW technology is simply a technology that completely eliminates the vehicle’s primary mechanical link that controls its steering. This link is between the steering wheel and the front wheels. To better discuss the advantages of this technique, a complete and thorough description is given in this paper and then a linear mathematical model is presented to meet the challenges at hand. Among these challenges is ensuring robust vehicles stability under complex working and road conditions. Simulation results are given at the end of this paper to confirm that stability of the system and its robustness can be obtained despite the disturbance. On the other side, the FW angle can move well and perfectly time towards the SW reference angle.
References
Anwar, S.: Generalized predictive control of yaw dynamics of a hybrid brake-by-wire equipped vehicle. Mechatronics 15(9), 1089–1108 (2005)
Anwar, S., Chen, L.: An analytical redundancy-based fault detection and isolation algorithm for a road-wheel control subsystem in a steer-by-wire system. IEEE Trans. Vehicular Technol. 56(5), 2859–2869 (2007)
Balachandran, A., Gerdes, J.C.: Designing steering feel for steer-by-wire vehicles using objective measures. IEEE/ASME Trans. Mechatron. 20(1), 373–383 (2014)
Bertoluzzo, M., Buja, G., Menis, R.: Control schemes for steer-by-wire systems. IEEE Ind. Electron. Mag. 1(1), 20–27 (2007)
Chang, S.-C.: Synchronization in a steer-by-wire vehicle dynamic system. Int. J. Eng. Sci. 45(2–8), 628–643 (2007)
Chen, T., Cai, Y., Chen, L., Xu, X., Sun, X.: Trajectory tracking control of steer-by-wire autonomous ground vehicle considering the complete failure of vehicle steering motor. Simul. Model. Pract. Theory 109, 102235 (2021)
Chen, H., Zhu, L., Liu, X., Yu, S., Zhao, D.: Study on steering by wire controller based on improved H\(_{\infty }\) algorithm. Int. J. Online Eng. 9(S2), 35–40 (2013)
El Fezazi, N., Tissir, E.H., El Haoussi, F., Bender, F.A., Husain, A.R.: Controller synthesis for steer-by-wire system performance in vehicle. Iranian J. Sci. Technol. Trans. Electr. Eng. 43(4), 813–825 (2019)
Hang, P., Chen, X., Fang, S., Luo, F.: Robust control for four-wheel-independent-steering electric vehicle with steer-by-wire system. Int. J. Automot. Technol. 18(5), 785–797 (2017)
Huang, C., Du, H., Naghdy, F., Li, W.: Takagi-sugeno fuzzy H\(_{\infty }\) tracking control for steer-by-wire systems. In: 1st IEEE Conference on Control Applications, Sydney, Australia, pp. 1716–1721 (2015)
Huang, C., Li, L.: Architectural design and analysis of a steer-by-wire system in view of functional safety concept. Reliability Eng. Syst. Saf. 198, 106822 (2020)
Huang, C., Naghdy, F., Du, H.: Delta operator-based model predictive control with fault compensation for steer-by-wire systems. IEEE Trans. Syst. Man Cybern. Syst. 50(6), 2257–2272 (2018)
Huang, C., Naghdy, F., Du, H., Huang, H.: Fault tolerant steer-by-wire systems: An overview. Annu. Rev. Control. 47, 98–111 (2019)
Kim, K., Lee, J., Kim, M., Yi, K.: Adaptive sliding mode control of rack position tracking system for steer-by-wire vehicles. IEEE Access 8, 163483–163500 (2020)
Kirli, A., Chen, Y., Okwudire, C.E., Ulsoy, A.G.: Torque-vectoring-based backup steering strategy for steer-by-wire autonomous vehicles with vehicle stability control. IEEE Trans. Veh. Technol. 68(8), 7319–7328 (2019)
Lan, D., Yu, M., Huang, Y., Ping, Z., Zhang, J.: Fault diagnosis and prognosis of steer-by-wire system based on finite state machine and extreme learning machine. Neural Comput. Appl. https://doi.org/10.1007/s00521-021-06028-0 (2021)
Li, R., Li, Y., Li, S. E., Zhang, C., Burdet, E., Cheng, B.: Indirect shared control for cooperative driving between driver and automation in steer-by-wire vehicles. IEEE Trans. Intell. Transp. Syst. (2020). https://doi.org/10.1109/TITS.2020.3010620
Mohamed, E.S., Albatlan, S.A.: Modeling and experimental design approach for integration of conventional power steering and a steer-by-wire system based on active steering angle control. Am. J. Vehicle Design 2(1), 32–42 (2014)
Mortazavizadeh, S.A., Ghaderi, A., Ebrahimi, M., Hajian, M.: Recent developments in the vehicle steer-by-wire system. IEEE Trans. Transp. Electrification 6(3), 1226–1235 (2020)
Shah, M.B.N., Husain, A.R., Dahalan, A.S.A.: An analysis of CAN-based steer-by-wire system performance in vehicle. In: 3rd IEEE Conference on Control System, Computing and Engineering, Penang, Malaysia, pp. 350–355 (2013)
Sun, Z., Zheng, J., Man, Z., Fu, M., Lu, R.: Nested adaptive super-twisting sliding mode control design for a vehicle steer-by-wire system. Mech. Syst. Signal Process. 122, 658–672 (2019)
Tashiro, T.: Fault tolerant control using disturbance observer by mutual compensation of steer-by-wire and in-wheel motors. In: IEEE Conference on Control Technology and Applications, pp. 853–858 (2018)
Virgala, I., Frankovský, P., Kenderová, M.: Friction effect analysis of a DC motor. Am. J. Mech. Eng. 1(1), 1–5 (2013)
Wang, H., Kong, H., Man, Z., Cao, Z., Shen, W.: Sliding mode control for steer-by-wire systems with AC motors in road vehicles. IEEE Trans. Industr. Electron. 61(3), 1596–1611 (2013)
Wang, H., Shi, L., Li, Z.: Robust hierarchical sliding mode control for steer-by-wire equipped vehicle yaw stability control. In: 11th Asian Control Conference, pp. 239–243 (2017)
Wu, X., Li, W.: Variable steering ratio control of steer-by-wire vehicle to improve handling performance. Proc. Inst. Mech. Eng. Part D J. Automobile Eng. 234(2–3), 774–782 (2020)
Yang, H., Liu, W., Chen, L., Yu, F.: An adaptive hierarchical control approach of vehicle handling stability improvement based on Steer-by-Wire Systems. Mechatronics 77, 102583 (2021)
Yang, Y., Yan, Y., Xu, X.: Fractional order adaptive fast super-twisting sliding mode control for steer-by-wire vehicles with time-delay estimation. Electronics 10(19), 2424 (2021)
Ye, M., Wang, H.: Robust adaptive integral terminal sliding mode control for steer-by-wire systems based on extreme learning machine. Comput. Electr. Eng. 86, 106756 (2020)
Yih, P., Ryu, J., Gerdes, J.C.: Modification of vehicle handling characteristics via steer-by-wire. IEEE Trans. Control Syst. Technol. 13(6), 965–976 (2005)
Zakaria, M.I., Husain, A.R., Mohamed, Z., El Fezazi, N., Shah, M.B.N.: Lyapunov-krasovskii stability condition for system with bounded delay-an application to steer-by-wire system. In: 5th IEEE Conference on Control System, Computing and Engineering, Penang, Malaysia, pp. 543–547 (2015)
Zakaria, M.I., Husain, A.R., Mohamed, Z., Shah, M.B.N., Bender, F.A.: Stabilization of nonlinear steer-by-wire system via LMI-based state feedback. 17th Springer In: Asian Simulation Conference, Melaka, Malaysia, pp. 668–684 (2017)
Zhang, J., Wang, H., Ma, M., Yu, M., Yazdani, A., Chen, L.: Active front steering-based electronic stability control for steer-by-wire vehicles via terminal sliding mode and extreme learning machine. IEEE Trans. Veh. Technol. 69(12), 14713–14726 (2020)
Zhang, J., et al.: Adaptive sliding mode-based lateral stability control of steer-by-wire vehicles with experimental validations. IEEE Trans. Veh. Technol. 69(9), 9589–9600 (2020)
Zhao, W., Qin, X., Wang, C.: Yaw and lateral stability control for four-wheel steer-by-wire system. IEEE/ASME Trans. Mechatron. 23(6), 2628–2637 (2018)
Zheng, B., Altemare, C., Anwar, S.: Fault tolerant steer-by-wire road wheel control system. IEEE American Control Conference, Portland, USA, pp. 1619–1624 (2005)
Zheng, H., Hu, J., Liu, Y.: A bilateral control scheme for vehicle steer-by-wire system with road feel and steering controller design. Trans. Inst. Meas. Control. 41(3), 593–604 (2019)
Zou, S., Zhao, W.: Synchronization and stability control of dual-motor intelligent steer-by-wire vehicle. Mech. Syst. Signal Process. 145, 106925 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this paper

Cite this paper
El Akchioui, N., El Fezazi, N., El Fezazi, Y., Idrissi, S., El Haoussi, F. (2022). Robust Controller Design for Steer-by-Wire Systems in Vehicles. In: Qian, Z., Jabbar, M., Li, X. (eds) Proceeding of 2021 International Conference on Wireless Communications, Networking and Applications. WCNA 2021. Lecture Notes in Electrical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-2456-9_51
Download citation
DOI: https://doi.org/10.1007/978-981-19-2456-9_51
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-2455-2
Online ISBN: 978-981-19-2456-9
eBook Packages: EngineeringEngineering (R0)