
Abstract
In the DC microgrid, in order to solve the DC bus voltage fluctuations caused by the randomness of distributed energy, multiple groups of DC bus voltage control units (DC BVC) are connected to the system through converters. The mechanism of the influence of the parameters of the converter on the stability of the DC microgrid system is still unclear. In this regard, this paper establishes the small signal model of DC BVC and load, and analyzes the output impedance characteristics of the source-side converter. Secondly, considering the influence of the interaction of multiple converters on the stability of the system, the equivalent impedance model of the DC microgrid is established. And according to the impedance matching principle, the influence characteristics of system parameters, converter control parameters and load power on system stability under different setting schemes are analyzed. Finally, the influence of the matching of multi-converter control parameters on system stability is analyzed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
DC microgrid has the advantages of high system reliability, few conversion links, low loss, etc., and there are no frequency and phase problems. As an effective way of distributed energy generation and consumption, DC microgrid has a wide range of application scenarios [1, 2].
The DC bus voltage is the only indicator to measure the stability of the DC microgrid [3]. Various DC bus voltage control devices are connected to the system through converters, and are based on centralized or distributed control strategies to maintain the DC bus voltage stability [4]. However, the parallel operation of multiple converters, the mutual coupling between converters, and the negative impedance characteristics of constant power loads have led to serious deterioration of the stability of the DC microgrid system [5, 6]. Domestic scholars have done a lot of research on the stability of DC microgrid. Among them, the small signal stability analysis is the most extensive, through the establishment of a small signal model of the system. Using Middlebrook, GMPM (Gain Margin and Phase Margin), Opposing Argument, ESACC (energy source analysis consortium criterion) and other impedance criteria to analyze the stability of the DC microgrid [6]. Reference [5] pointed out that the low damping LC link formed by the equivalent impedance of the line in the system and the stabilized voltage capacitor of the converter would cause the system to oscillate at high frequencies; Reference [6] established a DC microgrid impedance model with virtual inertia control. According to the principle of impedance matching, the influence of system parameters on stability is analyzed. The above conclusions mostly focus on the influence of a single converter parameter on the stability of the system, and do not consider the parameter matching problem when multiple converters are operated in parallel.
Aiming at the system stability problem caused by the parallel operation of multiple converters in the DC microgrid, this paper first establishes an equivalent model of the DC microgrid. Then the equivalent output impedance of the DC BVR and the equivalent input impedance of the load are deduced. Finally, with the help of Bode diagram, the influence of the parameters of the multi-converter on the stability of the system is analyzed.
2 System Structure of DC Microgrid
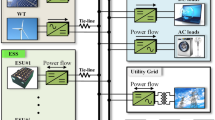
This paper mainly focuses on the research of DC microgrid with radial network structure. The schematic diagram of the structure is shown in Fig. 1. The system consists of distributed power sources, energy storage, AC and DC loads and power electronic converters.

Typical structure of DC microgrid
(1) In order to make full use distributed energy, Photovoltaic unit generally work in Maximum Power Point Tracking (MPPT), so they are equivalent to constant power supply (CPS); (2) AC and DC loads are divided into constant impedance loads and constant power loads (CPL), and they can be equivalent to the form of current source parallel impedance; (3) DC BVC is composed of a constant DC voltage source and a bidirectional Buck-Boost DC/DC converter to maintain the DC bus voltage stability and Power balance. These units are based on droop control, and the voltage and current PI control is used to track the change of bus voltage. The AC/DC converter adopts power control, so the decoupling operation of the AC and DC system can be realized. Therefore, the AC grid unit can be equivalent to a special type of constant power load with negative output power.
3 Small Signal Modeling of DC Microgrid
3.1 Model of DC Bus Voltage Control Unit
The DC BVC unit i is composed of an energy storage system Usi and a bidirectional DC/DC converter. The system structure is shown in Fig. 1. Among them, Usi and iLi are the battery power supply voltage and output current, respectively, Rsi and Lsi are the filter impedance, Rline and Lline is the line impedance, Zsi is the output impedance of the DC BVCi, Ci is the DC side capacitance, Uoi and ioi are the output voltage and output current, respectively, and Udc is the DC bus voltage. The DC BVR adopts voltage and current droop control mode. The control system is shown in Fig. 2.

DC bus voltage control unit structure diagram
If i = 1, the state equation of the DC bus voltage control unit and the converter duty cycle expression can be derived from Fig. 2 as
Linearize (1) at the stable point to get the following small signal model
According to the small signal model of the DC bus voltage control unit established in (1), (2) and Fig. 2, the output impedance of the converter can be obtained as shown in (3).
3.2 Model of Load
The loads studied in this paper are constant power loads. According to [7], the small signal input impedance of the constant power load can be obtained as
where Δudc is the disturbance of the DC voltage and ΔidcL the input current of the DC side of the load converter, Udc is the steady-state value of the DC voltage, Pconst is the steady-state value of the load power. According to (3), (4) and Fig. 1, the output and input impedance (Zout and Zin) of system can be obtained, as shown in (5).
The criterion of the impedance matching principle is that the system is stable when the Nyquist curve of the loop gain Tm = Zout/Zin does not enclose the point (− 1, j0) on the s-plane.
4 Analysis of System Stability
According to the DC microgrid model in Fig. 1, the influence of the change of the multi-converter parameters on the system stability is analyzed based on the impedance ratio criterion.
4.1 The Influence of DC Bus Capacitance on System Stability
The droop coefficients Rdi of the three DC BVC units are all set to 0.01, and the DC bus capacitance Ci is increased from 2000 to 4000 μF, the Bode diagram of output impedance Zout of DC BVC and the Nyquist curve of the system loop gain Tm(s) is shown in Fig. 3. As the DC capacity increases, the resonant peak value of Zout decreases, and the resonant frequency also decreases. The Nyquist curve does not enclose the point (− 1, j0) and shifts to the right, the system resonant frequency gradually decreases, and the phase margin increases, which indicates that the stability of the DC microgrid system gradually increases.

Bode diagram of Zout and Nyquist diagram of Tm(s) under different DC capacity conditions
4.2 The Influence of Converter Control Parameters on System Stability
The Kpi and Kii of the current controller in the converter control loop are changed to study the influence of the control parameters on the stability of the system. Kii = 50, Kpi takes 0.3, 0.32, and 0.34 in sequence; then, Kpi = 0.3, Kii takes 50, 40, and 35 in sequence. From the Nyquist diagram of Tm(s) drawn in Fig. 4, the stability of the system increases with the increase of Kpi. The stability of the system decreases with the increase of Kii.

Bode diagram of Zout under different control parameters of DC BVC (Kpi, Kii)
4.3 The Influence of Load Power on System Stability
Keeping the parameters of the three source converters the same and unchanged, the load power PCPL gradually increases from 10 kW, taking 10, 15, and 25 kW in turn. From the Nyquist diagram of Tm(s) drawn in Fig. 5, when the load power is 10 and 15 kW, the Nyquist curve does not enclose the point (− 1, j0), so the system is stable. When the load power is 25 kW, the system becomes unstable. With the load power continues to increase, the Nyquist curve moves to the left. So the stability of the system decreases.

Nyquist diagram of Tm(s) under different power of load
4.4 The Influence of the Parameter Matching of the DC BVC Units on System Stability
Two converters are operated in parallel. The system parameters of each converter remain the same, but the control parameters are set differently (C1 = C2 = 2000 μF, Rd1 = Rd2 = 0.01, PCPL = 2 kW; Kii_A = Kii_B = 50, Kpi_A = 0.3, Kpi_B = 0.34). The Bode and Nyquist diagram are shown in Fig. 6 under two working conditions (with the same parameters and different parameters). When the parameters are the same, the equivalent impedance of the system has a larger impedance peak. On the contrary, the peak decreases and the Nyquist curve moves to the right, the stability of the system is enhanced.

Bode diagram and Nyquist diagram of Tm(s) under different parameter settings
5 Conclusion
This paper derives the output and input impedance of the system by constructing a small-signal model of a DC microgrid with multiple converters operating in parallel.
-
(1)
When using a detailed model analysis of the DC microgrid converter, the low-damping LC link composed of line impedance and DC stabilized capacitor in the system interacts with the output impedance of the DC BVC unit, which causes the system to generate high-frequency oscillations and reduce system stability.
-
(2)
The DC bus voltage stabilizing capacitor increases the inertia of the system, and the increase of the capacitance value will increase the stability margin of the system; the control parameters of the converter will also have a significant impact on the stability of the system. But the constant power load will reduce the system stability, and as the load power increases, the system stability decreases.
-
(3)
For multi-converter parallel operation conditions, the equivalent impedance has a larger impedance peak in the resonance band and the system stability is poor when all converter parameters are consistent. If the parameters are different, the system equivalent impedance is better suppressed in the resonance band. Therefore, the parameter difference between multiple converters is conducive to the improvement of system stability.
References
Li X,Guo L, Wang C (2016) Key technologies of DC microgrids: an overview. Proc CSEE 36(1):2–17
Wan Q, Xia C, Guan L, Wu C (2019) Review on stability of isolated microgrid with highly penetrated distributed generations. Power Syst Technol 43(02):598–612
Zhu X, Li Z (2021) Stability analysis of multi converter DC microgrid. Power Syst Technol 45(04):1400–1410
Anand S, Fernandes BG, Guerrero JM (2013) Distributed control to ensure proportional load sharing and improve voltage regulation in low-voltage DC microgrids. IEEE Trans Power Electron 28(4SI):1900–1913
Guo L, Feng Y, Li X et al (2016)Stability analysis and research of active damping method for DC microgrids. Proc CSEE 35(4):927–936
Zheng K, Du W, Wang H (2021) DC microgrid stability affected by aggregated constant power loads based on impedance method. Power Syst Technol 45(01):134–148
Zhu X, Meng F (2020) Stability analysis of DC microgrid with virtual inertia control. Power Syst Technol 44(01):208–218
Acknowledgements
Funding: This work is supported by National Natural Science Foundation of China (No. 51977123), Key R&D Program of Shandong Province (No. 2019GGX103008), Young Scholar Program of Shandong University (No. 2016WLJH07).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Zhang, A., Sun, Y., Xu, Q., Xu, L., Yu, T., Pang, Y. (2022). Stability Analysis of DC Microgrid with Multi-converter Parallel Operation Based on Impedance Model. In: Hu, C., Cao, W., Zhang, P., Zhang, Z., Tang, X. (eds) Conference Proceedings of 2021 International Joint Conference on Energy, Electrical and Power Engineering. Lecture Notes in Electrical Engineering, vol 899. Springer, Singapore. https://doi.org/10.1007/978-981-19-1922-0_45
Download citation
DOI: https://doi.org/10.1007/978-981-19-1922-0_45
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-1921-3
Online ISBN: 978-981-19-1922-0
eBook Packages: EnergyEnergy (R0)