
Abstract
The objective of this paper is to investigate the dynamic stability of an elastic prismatic slender beam subject to axial parametric arbitrary loads by making use of a matrix method. Current research on the dynamic stability of structures are usually limited to harmonic loads, and the solution method is usually based on the Floquet’s theory. It is well known that loads on engineering structures are rarely harmonic, but arbitrary. These loads can be imposed on the structures by either human activities such as explosions and machine vibrations or natural phenomena such as earthquakes and hurricanes. This paper presents a method for the solution of second-order linear differential equations with periodic coefficients. In this approximation method, the elastic beam is considered as a continuous system with various simplifying assumptions under the sum of step functions, which is solved using a matrix method involving a set of chain of power of matrices. The governing dynamic equations of motion thus become a matrix or single differential equation being function of time only. The accuracy of the analysis is ensured by comparing the dynamic behaviour of an elastic beam obtained from this analysis with those obtained by other methods available in the previous studies of literature. Application examples are provided, and limitations of this approach are also discussed. The study provides an excellent theoretical knowledge to enhance the understanding of the dynamic stability of an elastic beam under axial arbitrary loads, which can be used to develop software and modify the relevant design codes.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

1 Introduction
It is a common practice to build structures like tall buildings, wind turbines, transmission towers, oil and gas platforms and bridges using piles as foundations which is actually design as well-known vertical Euler beam. Structures can be affected by various types of dynamic arbitrary loads. These loads can be imposed on the structures by either human activities such as explosions, traffic and machine vibrations or natural phenomena such as seismic activities, wind, waves, water currents and hurricanes. The dynamic instability of simply supported elastic Euler beams has gained tremendous attention by scholars at the very early stage. The renowned Mathieu equation, assuming structural axial loads are harmonic, not arbitrary, is used in the previous studies of literature. Shtokalo [8] authored the stability of linear differential equation with variable coefficients to solve the Mathieu-Hill equation in case of dynamic instability problems of an Euler Beam. The theory and application of the Mathieu equation was reviewed by McLachlan [6]. The most important contribution was conducted by Bolotin [1], who developed the approximate formula of the first three dynamic instability regions for structural dynamic instability. Briseghella et al. [2] studied the dynamic instability regions of the Euler beam by finite-element method. Yang and Fu [12] examined the dynamic instability of the Euler beams with layered composite materials, while Sochacki [9] analysed with additional elastic elements. Besides, Yan et al. [11] studied the effect of cracks on the dynamic instability of Euler beams. It is acknowledged that the loads on the engineering structures are rarely harmonic, but arbitrary which has been overlooked in the previous analyses. Nowadays, little research has been conducted considering arbitrary loading on structures. Huang et al. [5] developed an analytical method based on the Mathieu-Hill equation and the dynamic instability regions was calculated by the eigenvalue algorithm for computing the dynamic instability of the Euler beams with an uniform section under unsteady wind loads. Their study showed that the Euler beam become dynamically unstable, if it spotted in the instability regions whether the wind load was large or not. More recently, Deng et al. [3, 4] applied the dynamic bucking to investigate the rockbursts in mining engineering.
This present study attempts to investigate the dynamic instability of a simply supported elastic Euler beam under arbitrary axial loads. This study includes: (1) a new approximate method based on the Mathieu-Hill equation is developed to study the dynamic stability of the Euler beam. In this method, the elastic beam is considered as a continuous system with various simplifying assumptions under the sum of step functions, which is solved using a matrix method involving a set of chain of power of matrices. The governing dynamic equations of motion thus become a matrix or single differential equation being function of time only. (2) Application of the matrix method is discussed based on the real wind forces time-history from a wind tunnel test. (3)The accuracy of the analysis is ensured by comparing the dynamic behaviour of the Euler elastic beam obtained from this analysis with those obtained by other methods available in the literature.
2 Formulation
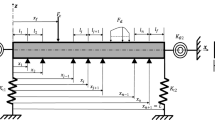
For a simply supported Euler beam with a uniform section with length, \(x\) under the action of the axial arbitrary load, the general reduced form of a second-order differential equation can be denoted as [10]:
where \(q(t)\) is a periodic function of time period \(T\). When the function \(q(t)\) is represented as a sum of step functions in the interval \(0\le t\le T\), the matrix method of solution is specially most effective to solve the Mathieu-Hill Equation [7]. \(q(t)\) is composed of the sum of \(n\) step functions. Each has a time period of \({T}_{0}\), which is the length and heights \({h}_{1},{h}_{2},{h}_{3},....{h}_{n}\), where
For the periodic function \(q(t)\), \(T\) is the fundamental period which consists of \(n\) number of rectangular step functions having different heights. Hence, the Hill Equation in Eq. 1 reduces to
Assume \(x(t)\) is the solution of Eq. 1 in the fundamental interval \(0\le t\le {T}_{0}\) and \(v(t)\) is the first derivative and these can be expressed as:
where \({A}_{1}\) and \({A}_{2}\) are arbitrary constants and \({u}_{1}\) and \({u}_{2}\) are linearly independent functions. Let the following notations be introduced:
The general solution of Eq. 1 in the interval of \(0\le t\le {T}_{0}\) can be written in a matrix form as
where \({x}_{0}\) and \({v}_{0}\) are the initial values at \(t=0\). Since the values of \(x\) and \(v\) at \(t={T}_{0}\) are the initial values of \(x\) and \(v\) in the next interval, \({T}_{0}\le t\le 2{T}_{0}\). The solution will take the form as
where \({\theta }_{2}={\omega }_{2}T=T\sqrt{{h}_{2}}\). If the indicated multiplication is performed at the end of \(n\) complete periods of the rectangular tipple of Fig. 1, the solution can be written in the form as follows:

The periodic input function, \(q(t)\)
where \(M\) is the monodromy matrix and the nature of the solution depends on the form taken by the powers of the matrix \([M]\). If \((A+D)\ne \pm 2\), the matrix \([M]\) has two distinct latent roots. The stability of solution can be determined by satisfying the following conditions:
The matrix \([M]\) can be acquired by considering the solution for two different initial conditions and also matrix \([M]\) can be obtained after one period \(T\) by the multiplication of the chain of matrices in the following form
This matrix method gives the solution of the equations of the type in Eq. 1 subject to prescribed initial conditions (initial-value problems), when the solutions are not restricted to be periodic ones. The current method reduces the solution of Eq. 1 subject to given initial-value conditions to that of computing powers of matrices and is applicable to the solution of dynamic stability of beams in practical engineering problems.
3 Verifications
In order to verify the precision of the matrix method of the present study, comparison of the first instability region graph of a real wind force time-history was conducted with the graph of [5]. Figure 2 compares the first instability regions obtained by the matrix method, [5] eigenvalue method, the first order approximation of the Mathieu equation which is calculated by the following formula [10] respectively:

Comparison of the first instability regions
It has been seen that the results from the three methods are almost similar at smaller excitation parameters \((\mu )\), however, bit different when the excitation amplitude is large. According to [1] the difference of the results of the matrix method and Huang et al.’s eigenvalue method with the approximation formula is because the influence of the \(i\)th harmonic wave on the width of the \(k\)th instability region is the order of \(({\mu }_{\kappa }+{\mu }_{\iota }{)}^{2}\), while under the wind load the value of \(({\mu }_{\kappa }+{\mu }_{\iota }{)}^{2}\) can be fairly large. Hence, it has been suggested that during the wind-induced instability analysis, the interaction between various types of harmonic waves should be considered carefully.
To verify the precision of the matrix method of this study, two points at A \((0.65, 0.80)\) and B \((1.31, 0.80)\) are chosen on the parametric plane, which are the same as [5]. The reason of selecting these points is, as the graph of the present study is a bit different from the graph of the eigenvalue method at the larger excitation parameters, selecting points of that zone is more appropriate to verify the precision of the matrix method. Point A is located inside the stable region of the matrix method, while it is in unstable region of the first-order approximations of the Mathieu equation. Point B is in the unstable region for all these three methods. According to the Modal response graph 2 [5] (see Fig. 3), it has been clearly seen that modal response of point A is confined in a range of about 0.01 m from the beginning (t = 0 s) to 100 s, on the other hand, in case of point B, modal response suddenly increases to about 5 m in the same direction at \(t=100\mathrm{ s}\). In other words, it can be said that point A behaves dynamically stable, while point B is dynamically unstable. This characteristics of these two points is perfectly captured by the proposed matrix method. So, it is proved that the matrix method of this study provides more accurate results to find the dynamic instability region of a simply supported Euler beam with uniform sections under any arbitrary dynamic axial load (Fig. 2).

Modal response of the parametric points A and B [5]
4 Case Study and Discussions
In order to describe the application of the matrix method, a case study has been conducted with the data of real wind force. The model tests of a cylindrical reticulated shell, with the span of 103 m, the longitudinal length of 140 m, and the height of 40 m, were carried in a TJ-2 wind tunnel of Tongji University, China, in order to obtain the time-history of the wind pressure on the shell (Fig. 4).

The test data was given by [5] for the present study and details information about the test procedure was provided in [13]. The number of the wind load data is \(N=6000\) and sampling frequency is \({F}_{s}=9.58\mathrm{ Hz}\). Hence the load duration is \({t}_{\mathrm{max}}=\frac{N}{{F}_{s}}=626.30\mathrm{ s}\). To conduct the present study, the calculation of first 10 data is shown. The fundamental interval \(T=1\) is divided into ten equal segments of length \({T}_{0}=\frac{1}{10}\) in order to represent the function \(q(t)\) by step functions. A graphical representation of the \(q(t)\) and the step function are shown in Fig. 5.

The periodic input function \(q(t)\) with a period of \(T=1.0\)
This matrix method is used to find the instability boundaries for the Mathieu-Hill equation in Eq. 1 with input function in the form of a sum of step functions. The solution is based on a procedure involving a set of chain of different power matrices. It can be clearly seen that the steps of Fig. 5 are not followed any specific patterns. Hence, the general integration method is used to calculated the area. And then, the actually height of each segment of the fundamental interval \(0\le t\le 1.0\) with a periodic function of fundamental period \(T=1\) is calculated. The values of \({h}_{k}\), \({\omega }_{k}\) and the matrix elements of \([M{]}_{k}\) are calculated using Eqs. 6 and 12. The calculated data of the parameters are represented in Table 1.
The values of \({x}_{k}\) and \({v}_{k}\) of the solution at the end of the \(k\mathrm{th}\) subinterval considering the initial conditions \({x}_{0}=1\) and its first derivative \({v}_{0}=\frac{1}{2}\) are presented in Table 2. The matrix \([M]\) is obtained by multiplication of the chain of matrices in the form
From Eq. 14, we can write
It can be clearly seen that the solution is stable in this case study, which is based on the stability criterion of Eq. 10. This calculation is only the first 10 data of the real wind force. There are N = 6000 data available from the mentioned test. Similar calculation can be conducted to find the matrix \([M{]}_{N=6000}\).
5 Conclusions
A new approach, i.e., the matrix method, for analysing the dynamic stability of a simply supported elastic Euler beam under arbitrary axial loads is established based on a class of second-order linear differential equations with periodic coefficients of Mathieu-Hill equation with a sum of step functions. This system is solved numerically using the monodromy matrix method based on a procedure involving a set of chain of different power matrices. The procedure is adequate for the study of a large class of dynamic stability of beams in practical engineering problems, such as piles under earthquake, and mine pillars excited by underground blasting. The accuracy of the analysis is ensured by comparing the dynamic behaviour of an elastic beam obtained from the matrix method with other methods available in the literature. The present method accurately obtained similar graphs like other methods. Application examples are provided, and limitations of this approach are also discussed. The study provides an excellent analytical knowledge to enhance the understanding of dynamic stability of elastic beams under axial arbitrary loads, which can be used to develop software and modify the relevant design codes.
References
Bolotin VV (1964) The dynamic stability of elastic systems. Holden-Day Inc., San Francisco, California, USA
Briseghella L, Majorana CE, Pellegrino C (1998) Dynamic stability of elastic structures: a finite element approach. Comput Struct 69(1):11–25
Deng J, Kanwar NS, Pandey MD, Xie WC (2019) Dynamic buckling mechanisum of pillar rockbursts induced by stress waves. J Rock Mech Geotech Eng 11:944–953
Deng J (2021) Analytical and numerical investigations on pillar rockbursts induced by triangular blasting waves. Int J Rock Mech Mining Sci 138:104518
Huang YQ, Lu HW, Fu JY, Liu AR, Gu M (2014) Dynamic stability of euler beams under axial unsteady wind force. Math Probl Eng 434868
McLachlan NW (1964) Theory and application of Mathieu functions. Dover, NewYork, NY, USA
Pipes LP, Harvill LR (2014) Applied mathematics for engineers and physicists. International series in pure and applied mathematics, 3rd edn. Dover Publication
Shtokalo Z (1961) Linear differential equations with variable coefficients: criteria of stability and unstability of their solutions. Hindustan Publishing Corporation, NewYork, NY, USA
Sochacki W (2008) The dynamic stability of a simply supported beam with additional discrete elements. J Sound Vib 314(1–2):180–193
Xie WC (2010) Dynamic stability of structures. Cambridge University Press, New York, NY, USA
Yan T, Kitipornchai S, Yang J (2011) Parametric instability of functionally graded beams with an open edge crack under axial pulsating excitation. Compos Struct 93(7):1801–1808
Yang JH, Fu YM (2007) Analysis of dynamic stability for composite laminated cylindrical shells with delaminations. Compos Struct 78(3):309–315
Zhou XY, Huang P, Gu M, Mi F (2011) Wind loads and response of two neighbouring dry coal sheds. Adv Struct Eng 14(2):207–221
Acknowledgements
The authors would like to thank to Dr. You-Qin Huang for providing the wind forces time-history data from the wind tunnel test. The research of this study was supported, in part, by the National sciences and Engineering Research Council of Canada (NSERC).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Ethics declarations
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper. And there has been no significant financial support for this work that could have influenced its outcome.
Rights and permissions
Copyright information
© 2023 Canadian Society for Civil Engineering
About this paper

Cite this paper
Siddique, S., Deng, J., Mohamedelhassan, E. (2023). Dynamic Stability of Elastic Beams Under Axial Arbitrary Loads. In: Walbridge, S., et al. Proceedings of the Canadian Society of Civil Engineering Annual Conference 2021 . CSCE 2021. Lecture Notes in Civil Engineering, vol 241. Springer, Singapore. https://doi.org/10.1007/978-981-19-0511-7_26
Download citation
DOI: https://doi.org/10.1007/978-981-19-0511-7_26
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-0510-0
Online ISBN: 978-981-19-0511-7
eBook Packages: EngineeringEngineering (R0)