
Abstract
In this research paper, a framework for optimal reactive power planning (RPP) in power transmission system is proposed. This is a comprehensive study for the installation of FACTS (flexible AC transmission system) devices and the minimization of operating cost. The locations for the equipment of FACTS devices are determined depending upon a set of mathematical calculations and considerations. Here, the operating cost is formulated as the sum of cost associated with real power loss, reactive power generation of generators, cost during line charging, and FACTS device cost. The control variables for RPP are addressed as optimization problem. So, in order to facilitate the solution of RPP, hybrid algorithm is used in this article. The proposed approach has been performed on standard IEEE 14 and IEEE 57 bus. A comparative study has been done among the simulation results and much better performance is noticed in case of hybrid algorithm.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Electric power transmission operators and planners have had immense concern on the importance of reactive power in operation and planning problems. This concern originates from the ever increasing load demands, uncertainty in voltage stability and economic benefits by obeying the operational limits. Due to the insufficient flow of reactive power (VAr) through the power line causes a measurable amount of active power losses. Hence, the basic aim of reactive power planning (RPP) is to lower power losses and total system operational costs. Added to that, RPP also defines about the positions for VAr compensation devices, rating about the equipment, cost components, and optimal set of control variables. The main control variables in RPP are generator reactive power outputs, tap settings of transformers, size of the VAr compensation devices etc.
From decades, different solution techniques of RPP have been reported by the power system planners and researchers. These solution approaches are mainly categorized in three different groups which are shown in Ref. [1]. Chattopadhyay et al. [2] decided the installation places and sizes of the capacitors by analyzing the cost-benefits in every buses. After that they decided the investment cost and calculated total operating cost of the system. To find out the proper location of VAr sources three different methods have been reported in Ref. [3]. Analysis of voltage security margin, sensitivity of the buses, and benefit in cost was collectively determines the optimal locations. In order to find out the discrete variables related to optimal reactive power flow, authors used mixed-integer nonlinear programming (MINLP) in Ref. [4]. Statistical approximation method was implemented to simplify the VAr planning model [5]. Thukaram and Parthasarathy [6] reported the monitoring strategy in voltage stability. Here, L-indices were used to predict the voltage stability margins. An improved-particle_swarm_optimization algorithm was to optimize the control variables related to reactive power in Ref. [7]. To enhance the local search of the variables, eagle strategy was adopted in this research article. To keep voltage security margin stable, authors in Ref. [8] used the sensitivity of load margin dealt with the generator reactive power output. Being a large‐scale optimization problem, this article implemented both PSO and conventional method in base case. Fuzzy-TLBO method was implemented in Ref. [9] to optimize the reactive power control variables under different load demand. In article [10], genetic algorithm (GA) based method was reported for the management of system reactive power. The optimal value of Q-generation of generators, shunt capacitors and transformer tap ratio was needed for the calculation of minimum operating cost. In order to solve the nonlinear optimal VAr dispatch problem differential evolution (DE) algorithm worked in Ref. [11]. Different soft computing techniques like PSO, big_bang–big_crunch (BBBC), crow search algorithm, and teaching–learning-based optimization (TLBO) algorithm were reported in Ref. [12] for lowering the active power loss as well as total operating cost.
In this article, authors proposed an optimization based framework for RPP in power transmission network. It is known that reactive power serves an important tusk in power system, and it directly influences on the real power losses and operating cost. Inside this research work, the operating cost is formulated as the sum of four different cost components. The aim of this research is to minimize the all cost components. Also, for the VAr compensation in the system, FACTS devices are installed with their appropriate locations and sizes. The locations are defined through mathematical analysis. The sizes of these devices are measured with the help of optimization approaches. Since RPP is a nonlinear optimization oriented complex problem, the authors also implemented hybrid optimization algorithms to find out an optimal solution set.
2 Problem Formulation
The aim of proposed RPP strategy is to get an optimized value of operating cost (O.C) ensuring system stability. All possible VAr dependent cost components are formulated within the objective function. Equation (1) represents the empirical equation of O.C.
The cost associated with PL is calculated as
The FACTS device cost CFACTS is dependent on two separate cost components. These components are CSVC (cost due to SVC) and CTCSC (cost due to TCSC). The price of these devices (CFACTS) is calculated by following Eq. (3).
Q represents the reactive power support from TCSC/SVC in MVAR. The cost coefficient values (∝, β, and γ) of different FACTS devices [13] are given in Table 1.
The mathematical formula to calculate reactive generator power cost CCqg is
It is mandatory in RPP that if any VAr support provided by the network is to be identified, we must include the cost of that support in objective function. So the authors proposed to include line charging cost [14] as a part of reactive power source. Therefore,
For any line (i–j), the expression for line charging reactive power is
So in a nut shell, the complete expression of the objective function in this article is
It is seen from the above equation that the objective function is a combinational tusk associated with four different cost components. The technical characteristics of this components are dependent on reactive power contributions to the system. Since this paper aims for the planning of VAr so, Eqs. (3), (5), (6), and (7) are directly formulated with the term of VAr support. It is a common practice in case of RPP that if any reactive power support is identified, then it should be consider during the operation of objective function.
Constraints: In this article, following constraints are handled during the execution of the proposed strategy. Equations (9) and (10) represent the equality constraints while Eq. (11) expresses the equality constraints.
3 Proposed Methodology
It is seen from the previous sections that RPP is a nonlinear optimization oriented complex problem. So it is very hard to solve this problem in a single step. To obtain the solution of the problem, successive operations have been rendered in this research article. The steps for the execution of proposed strategy are given below.
3.1 Weak Bus and Line Detection
The optimal placement of VAr compensation devices is a prime concerns in RPP. Many researchers have been reported different approaches in their research works. In this research works, different mathematical methods are adopted for the detection of weak positions in the system prior to the installation of SVC (static VAr compensator) and TCSC (thyristor controlled series capacitor). The SVCs are installed at the weak buses, and TCSCs are installed at weak lines. The weak buses are fixed up by using Loss sensitivity analysis (LSA) [15], power flow analysis (PFA) [15], and modal analysis (MA) [15]. The weak lines are detected through voltage collapse proximity indication (VCPI) method [16], power flow analysis (PFA) method, and fast voltage Stability Index (FVSI) method [16]. The weak positions for IEEE 14 bus and IEEE 57 bus are tabulated in Table 2.
3.2 Application of Evolutionary Algorithms
To explore the solution set of generator reactive power output, FACTS device ratings and tap ratio (tap) of transformers different evolutionary algorithms and their hybridizations have been applied. Here particle swarm optimization algorithm [17], differential evolution algorithm [18], JAYA algorithm [19], hybrid PSODE, crow search algorithm (CSA) [20], and hybrid CSAJAYA [16] have been used for the optimization purpose.
The working mechanism of CSA mainly is similar to the food searching method of crow. Also, this algorithm follows the intellectual behavior of the crow during the storage of optimal values. In CSA, the random position of the decision variables and their storage are expressed in Eq. (12) and (13), respectively. The position and memory at iteration (iter) of ith element (ith crow) are denoted by Xi, iter and Mi, iter, respectively.
Again if we have an objective function f(x), then the variables of this variables are updated using JAYA algorithm as
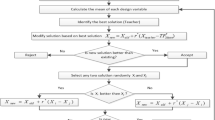
In Hybrid CSAJAYA, the positions are updated following Eq. (15) in search space. The searching strategy mainly dependents on awareness probability (AP) and flight length (fl) similar to CSA. The algorithm of CSAJAY is mentioned below.

4 Results and Discussions
The experiments for the proposed scheme was conducted in MATLAB domain using Intel (R) Core i5 (2.9 GHz) processor. The proposed strategy was performed on IEEE 14 bus (system 1) and IEEE 57 bus (system 2) power network. In Table 3, the details of the test networks are mentioned clearly. The aim of the proposed method is to minimize the real power loss (PL) and system operating cost. The initial PL and operating cost are 0.1339 pu and 7.0352 × 106 $ in case of system 1 whereas for system 2 these values are 0.2799 pu and 1.4708 × 107 $, respectively.
After the placement of SVC and TCSC, different optimization algorithms were applied for the minimization of objective function. Different possible combinations of FACTS devices have been tested to get an optimal solution of RPP. It is seen that CSAJAYA produced better results in comparison to their optimization algorithms. The results obtained from these possible combination are given in tabulated form. Table 4 and table 5 represent the values of minimum PL and O.C obtained by using hybrid CSAJAYA in case of system 1 and system 2, respectively. Table 4 describes the optimal solution of objective function subject to IEEE_14 bus. From this table, it is found that minimum loss and minimum cost are obtained as 0.1323 pu and 6.9563 × 106 $ while SVC was placed according to LSA method, and TCSC was installed according to VCPI method.
From Table 5, it is seen that the combination of LSA and VCPI produced a promising solution of active power loss (PL) and O.C. The optimized solution of PL and O.C are 0.2503 pu and 1.3154 × 107 $, respectively, in case of IEEE 57 bus. Figures 1 and 2 represents the convergence characteristics of PL in case of system 1 and 2, respectively. These characteristics shows the best results obtained from corresponding algorithms.

Convergence characteristics of real power losses in case of system 1

Convergence characteristics of real power losses in case of system 2
5 Conclusion
In this research paper, optimization based approach was proposed for the planning of reactive in power transmission network. For reactive power support, SVC and TCSC were installed at weak positions. The weak positions for the placement of these devices were satisfactorily determined through the mathematical computations. During reactive power compensation, the bus voltages are improved within their limits. Hybrid algorithms performed satisfactorily in searching space and generated optimal set of control variables. The objective function was solved by using these control variables and produced a promising solution of RPP.
References
Shaheen AM, Spea SR, Farrag SM, Abido MA (2018) A review of meta-heuristic algorithms for reactive power planning problem. Ain Shams Eng J 9(2):215–231
Chattopadhyay D, Bhattacharya K, Parikh J (1995) Optimal reactive power planning and its spot-pricing: an integrated approach. IEEE Trans Power Syst 10(4):2014–2020
Cuello-Reyna AA, Cedeño-Maldonado JR (2006) Combined analytic hierarchical process-differential evolution approach for optimal reactive power planning. In: 2006 International conference on probabilistic methods applied to power systems. IEEE, pp 1–8
Lashkar Ara A, Kazemi A, Gahramani S, Behshad M (2012) Optimal reactive power flow using multi-objective mathematical programming. Scientia Iranica 19(6):1829–1836
Chattopadhyay D, Chakrabarti BB (2001) Voltage stability constrained Var planning: model simplification using statistical approximation. Int J Electr Power Energy Syst 23(5):349–358
Thukaram BD, Parthasarathy K (1996) Optimal reactive power dispatch algorithm for voltage stability improvement. Int J Electr Power Energy Syst 18(7):461–468
Lu J-G, Zhang L, Yang H, Du J (2010) Improved strategy of particle swarm optimisation algorithm for reactive power optimisation. Int J Bio-Inspired Comput 2(1):27–33
El-Araby E-S, Yorino N (2018) Reactive power reserve management tool for voltage stability enhancement. IET Gener Transm Distrib 12(8):1879–1888
Moghadam A, Seifi AR (2014) Fuzzy-TLBO optimal reactive power control variables planning for energy loss minimization. Energy Convers Manage 77:208–215
Bhattacharyya B, Karmakar N (2020) Optimal reactive power management problem: a solution using evolutionary algorithms. IETE Tech Rev 37(5):540–548
Abou El Ela AA, Abido MA, Spea SR (2011) Differential evolution algorithm for optimal reactive power dispatch. Electr Power Syst Res 81(2):458–464
Bhattacharyya B, Karmakar N (2020) A planning strategy for reactive power in power transmission network using soft computing techniques. Int J Power Energy Syst 40(3):141–148
Ghaemi S, Aghdam FH, Safari A, Farrokhifar M (2019) Stochastic economic analysis of FACTS devices on contingent transmission networks using hybrid biogeography-based optimization. Electr Eng 101(3):829–843
De M, Goswami SK (2010) A direct and simplified approach to power-flow tracing and loss allocation using graph theory. Electr Power Compon Syst 38(3):241–259
Karmakar N, Bhattacharyya B (2020) Optimal reactive power planning in power transmission network using sensitivity based bi-level strategy. Sustain Energy Grids Netw 23:100383
Karmakar N, Bhattacharyya B (2020) Optimal reactive power planning in power transmission system considering FACTS devices and implementing hybrid optimisation approach. IET Gener Transm Distrib
Kennedy J, Eberhart R (1995) Particle swarm optimization. In: Proceedings of ICNN'95-international conference on neural networks, vol 4. IEEE, pp 1942–1948
Storn R, Price K (1997) Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J Global Optim 11(4):341–359
Rao R (2016) Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int J Ind Eng Comput 7(1):19–34
Askarzadeh A (2016) A novel metaheuristic method for solving constrained engineering optimization problems: crow search algorithm. Comput Struct 169:1–12
Pai MA (2005) Computer techniques in power system analysis, 3rd edn. McGraw-Hill Education (India)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Karmakar, N., Dey, B., Bhattacharyya, B. (2022). A Planning Framework for Reactive Power in Power Transmission System Using Compensation Devices. In: Kumar, J., Tripathy, M., Jena, P. (eds) Control Applications in Modern Power Systems. Lecture Notes in Electrical Engineering, vol 870. Springer, Singapore. https://doi.org/10.1007/978-981-19-0193-5_18
Download citation
DOI: https://doi.org/10.1007/978-981-19-0193-5_18
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-0192-8
Online ISBN: 978-981-19-0193-5
eBook Packages: EnergyEnergy (R0)