
Abstract
Common cancer among the women is breast cancer that develops in either the lobules or the ducts of the breast. Identifying the tumor shapes in ultrasound images is still a challenging job because of speckle noise, poor contrast, and image intensity variations. A multiphase level set strategy is proposed in this research to efficiently segment the ultrasound image. Speckle noise of ultrasound images is reduced by using speckle reducing anisotropic diffusion (SRAD) filter. This proposed model demonstrates that it outperforms the Chan-Vese (CV) method and handles noisy, low contrast images better. This proposed approach is more robust to intensity inhomogeneities. Experiments show that the suggested method extracts more precise tumor boundaries than the CV method. This proposed approach is validated with different performance measure metrics such as Jaccard coefficient, Dice coefficient, and Hausdorff distance.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Breast cancer is the most common cancer among women worldwide [1, 2]. Early identification of signs and symptoms of breast cancer helps to decrease the mortality [3, 4]. Breast ultrasound (BUS) imaging is popular since it is non-invasive and does not use radiation [4]. However, in order to achieve the correct diagnosis, clinical knowledge and competence are required [5]. Currently time-consuming and tedious manual segmentation methods are replaced by automated segmentation process that requires little or no user intervention. Automatic segmentation of the BUS image remains a difficult task for two primary reasons. First, the BUS images show speckle noise, local intensity changes, and low contrast. Secondly, breast tumors vary widely in shape, size, and location. Numerous researchers have segmented the image of the BUS using active contour methods.
In this paper, the preprocessing of ultrasound images has been done by using speckle reducing anisotropic diffusion (SRAD) to minimize speckle noise. Most frequently used region-based active contour method has been shown homogeneous regions. However, they fails with inhomogeneity of the image. To overcome this, paper proposes multiphase level set formulations to segment the inhomogeneous images in order to detect the more precise tumor boundaries in low contrast regions. The following is the structure of the paper: Sect. 2 describes related works for ultrasound image segmentation. Section 3 explains the preprocessing, Chan-Vese (CV), and level set approaches, and Sect. 4 describes data collection, experimental results, and discussion accompanied by the works conclusions.
2 Related Work
Many popular segmentation methods rely on [6,7,8] intensity homogeneity but they are ineffective for inhomogeneous images. Based on task specific constraints, a quantitative survey of low-quality ultrasound image segmentation is conducted [9]. Region-based active contour model with Ostu thresholding technique can be applied for homogeneous images [10]. The threshold will be selected by minimizing the variance. The snake model [11, 12] was widely used for BUS images. The snake deformation procedure is a very time-consuming and manual generation of initial contour. The smoothing process [13] to reduce the effect of noise will make weak edges to disappear.
To handle the speckle noise robustly, phase-based level segmentation [14] is proposed. This method considers the local orientation and phase from the monogenic signal. An efficient despeckling method called Bayesian non-local means filter (OBNLM) [15] is used to ultrasound images to minimize speckle noise. The speckle noise will be removed by using SRAD filter for sonography images. Edge-based active contour model [16] which will robustly mange the speckle noise and uses the phase information for better edge map.
3 Proposed Multiphase Level Set Approach
Ultrasound images are generally affected by speckle noise [17, 18]. SRAD filter is used to reduce the speckle noise and the preservation and enhancement of the edges. In the Chan-Vese active contour [6, 19] method, for given US image \(f\left( {x,y} \right)\) in domain \({\Omega }\), the energy functional given by (1)
where µ\(,v\), and \(\lambda 1\lambda 2\) are fixed parameters having the value greater or equal to zero. Smoothness controlled by µ, propagation speed increased by v, and inside and outside forces of the image contour controlled by \({ }\lambda 1\lambda 2\). Inside and outside of the C, image intensity are approximated by c1 and c2 energy functions, respectively.
CV method requires a complex differential method for numerical stability and relays on intensity homogeneity. This proposed technique overcomes the segmentation difficulty for intensity heterogeneous images. Multiphase level set method is used in this technique to segment the US image into 2m sections. The US images can be segmented with more than two objects. For two phase segmentation, image domain \({\Omega }\) is divided into two \(\Omega 1{\text{ and }}\Omega 2{\text{ sections}}\) and can be shown as membership functions represented by M1 \(\left( \phi \right){ } = H{ }\left( \phi \right)\) and M2 \(\left( \phi \right){ } = 1 - H{ }\left( \phi \right)\). Hence, the level set formulation [20] for the energy is given by Eq. (2)
Here, \(K\left( {y - x} \right)\) is positive window function. Such that \({ }K\left( {y - x} \right) = 0\), \(b\left( y \right)\) is the slowly varying bias field. By simplification, Eq. (2) can written as Eq. (3)
Hence, rewriting the energy \(\varepsilon \left( {\left( \phi \right),c,b} \right)\) for multiphase level set Eq. (4)
Multiphase level set approach detects the region of interest in inhomogeneous better than the CV method, and also the position of the initial contour is independent of the object need to be detected in the given image. The multiphase level set not only gives us intensity information, but it also tells us where and how picture features are located.
4 Results and Discussion
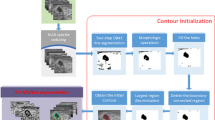
Experiments are performed on the ultrasound (US) image dataset of Baheya [21] hospital. MATLAB 2018b is used to implement the proposed approach and validated with CV method results for the dataset of 100 images. In Fig. 1a, it shows four despeckeled ultrasound images are illustrated to evaluate the effectiveness of the method. The segmented results of CV method and proposed approach are shown in Fig. 1b and c. The CV method’s accuracy is determined by the initial contour’s location. The CV method curves boundaries are not smooth, as can be seen in the figure, but the proposed strategy can detect the tumor boundary with very smooth contours, independent of the starting contour’s position. Experiments show that the proposed method extracts more precise tumor boundaries than the CV method. Figure 1d shows the segmented part of the tumor for the proposed approach.

a Despeckled image, b CV method contour, c proposed method contour, d segmented
4.1 Performance Metrics
To evaluate the accuracy of the proposed segmentation approach, the performance measures [22] Dice coefficient (DC), Jaccard coefficient (JC), and Hausdorff distance are represented in Eqs. (5), (6), and (7), respectively, were used. The Hausdorff distance (HD) [23] measures the max distance between two contours. Comparison of performance metrics for CV and proposed method is shown in Table 1. For tumor region between two label sets L and S, let L is the ground truth and S is the automated contour from segmentation. J(L, S) and D(L, S) get values ranging from 0 to 1. Larger value implies the better segmentation. Optimal value of HD(L, S) is 0. DC measures the segmentation result’s overlap with the ground truth.
5 Conclusion
Currently, ultrasound is the best imaging modality in conjunction with mammography for detecting and diagnosing breast abnormalities. In this paper, level set-based US image segmentation is proposed. First, low contrast and speckled US images are denoised by SRAD filter and proposed method has been validated by performing experimentation on 100 images. The experiments demonstrate that the CV method is fails in case inhomogeneity images, and boundaries are not smooth. In contrast, this proposed approach can detect the tumor boundary with very smooth contours. The metrics such as JC, DC, and Hausdorff distance have been used to assess the recommended method’s efficacy for better segmentation. Further, these findings can be used in feature extraction and classification of ultrasound images to detect breast cancer.
References
R.L. Siegel, K.D. Miller, A. Jemal, Cancer statistics. Cancer J. Clin. 65(1), 5–29 (2015)
L. Fan, K. Strasser-Weippl, J.-J. Li, J. St Louis, D.M. Finkelstein, K.-D. Yu, Z.-M. Shao, P.E. Goss, Breast cancer in China. Lancet Oncol. 15(7), 279–289 (2014)
H.D. Cheng, X.J. Shi, R. Min, L.M. Hu, X.R. Cai, H.N. Du, Approaches for automated detection and classification of masses in mammograms. Pattern Recogn. 39(2006), 646–668 (2006)
B.O. Anderson, R. Shyyan, A. Eniu, R.A. Smith, C.H. Yip, N.S. Bese, L.W. Chow, S. Masood, S.D. Ramsey, R.W. Carlson, Breast cancer in limited-resource countries: an overview of the breast health global initiative 2005 guidelines. Breast J. 12(2006), 3–15 (2006)
H.D. Cheng, J. Shan, W. Ju, Y.H. Guo, L. Zhang, Automated breast cancer detection and classification using ultrasound images a survey. Pattern Recogn. 43(2010), 299–317 (2010)
T. Chan, L. Vese, Active contours without edges. IEEE Trans. Image. Process 2(10), 266–277 (2001)
R. Ronfard, Region-based strategies for active contour models. Int. J. Comput. Vis. 13(2), 229–251 (1994)
C. Samson, L. Blanc-Feraud, G. Aubert, J. Zerubia, A variational model for image classification and restoration. IEEE Trans. Pattern Anal. Mach. Intell. 22(5), 460–472 (2000)
J. Nobel, D. Boukerroui, Ultrasound image segmentation: a survey. IEEE Trans. Med. Imaging 25(8), 987–1010 (2006)
C. Li, Distance regularized level set evolution and its application to image segmentation. IEEE Trans. Image Process. 19(12), 3243–3254 (2010)
M. Kass, A. Witkin, D. Terzopoulos, Snakes: active contour models. Int. J. Comput. Vision 1, 321–331 (1996). https://doi.org/10.1007/BF00133570
R.F. Chang, W.J. Wu, W.K. Moon, W.M. Chen, W. Lee, D.R. Chen, Segmentation of breast tumor in three-dimensional ultrasound images using three-dimensional discrete active contour model. Ultrasound Med. Biol. 29(2003), 1571–1581 (2003)
G.R. Byra Reddy, H. Prasanna Kumar, Smoothing of mammogram using an improved gradient based technique. Adv. Biomed. Eng. 9, 202–208 (2020). https://doi.org/10.14326/abe.9.202
A. Belaid, D. Boukerroui, Y. Maingourd., J.-F. Lerallut, Phase-based level set segmentation of ultrasound images. IEEE Trans. Inf. Technol. Biomed. 15(1), 138–146 (2011)
J. Kang, J.Y. Lee, Y. Yoo, A new feature-enhanced speckle reduction method based on multiscale analysis for ultrasound b-mode imaging. IEEE Trans. Biomed. Eng. 63(6), 1178–1191 (2016)
L. Gao, X. Liu, W. Chen, Phase and GVF-based level set segmentation of ultrasonic breast tumors. J. Appl. Math. 1–22 (2012)
Y. Yu, S.T. Acton, Speckle reducinganisotropic diffusion. IEEE Trans. Image Process. 11(11), 1260–1270 (2002)
Y. Guo, H.D. Cheng, J. Tian, Y. Zhang, A novel approach to speckle reduction in ultrasound imaging. Ultrasound Med. Biol. 35(4), 628–640 (2009)
H. Prasanna Kumar, S. Srinivasan, Fast automatic segmentation of polycystic ovary in ultrasound images using improved chan-vese with split Bregman optimization. J. Med. Imag. Health Inf. 5, 57–62 (2015)
G.G.N. Gewied, M.A. Abdallah, Novel approach for breast cancer investigation and recognition using M-level set based optimization functions. IEEE Access 7(1), 136343–136357 (2019)
W. Al-Dhabyani, M. Gomaa, H. Khaled, A. Fahmy, Dataset of breast ultrasound images. Data in Brief (2020)
A.A. Taha, A. Hanbury, Metrics for evaluating 3d medical image segmentation: analysis, selection, and tool. BMC Med. Imag. 15(1), 29–39 (2015)
D. Karimi, S.E. Salcudean, Reducing the hausdorff distance in medical image segmentation with convolutional neural networks. IEEE Trans. Med. Imag. 39(2), 499–513 (2020)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Byra Reddy, G.R., Prasanna Kumar, H. (2022). Breast Ultrasound Image Segmentation to Detect Tumor by Using Level Sets. In: Saini, H.S., Singh, R.K., Tariq Beg, M., Mulaveesala, R., Mahmood, M.R. (eds) Innovations in Electronics and Communication Engineering. Lecture Notes in Networks and Systems, vol 355. Springer, Singapore. https://doi.org/10.1007/978-981-16-8512-5_35
Download citation
DOI: https://doi.org/10.1007/978-981-16-8512-5_35
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-8511-8
Online ISBN: 978-981-16-8512-5
eBook Packages: EngineeringEngineering (R0)