
Abstract
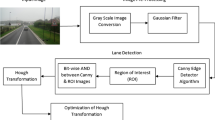
Lane vehicle detection is fundamental to vehicle driving systems and self-driving. The proposed concept is to employ the pixel difference in the intended lane line backdrop to isolate the lane and the road surface, and then, the curve fitting model is used to identify the lane in the image. A histogram on gradient, histogram graph, and binary spatial features are extracted from the vehicle and non-vehicle images. For vehicle detection, support vector machine classifier is employed to separate the vehicle and non-vehicle images using the extracted features. But many methods are constrained by light conditions and road circumstances, such as weak light, fog, rain, etc., which may result in invisible lane lines. Feature extraction is the lane images being picked using various filters. Our work focuses on a lane detection technique founded on the Sobel filter and curve fitting model for lane line tracking in different conditions. Preprocessing encompasses the mitigation of noise as well as getting the image ready for the subsequent procedure. To achieve this, HLS color space was performed which identifies the lane by adding pixel values. The main aim is to increase the accuracy and reduce the computation time compared to other existing methods.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Marzougui M, Alasiry A, Kortli Y, BailI J (2020) A lane tracking method based on progressive probabilistic Hough transform. IEEE Access 8:84893–84905, 13 May 2020
Xuan H, Liu H, Yuan J, Li Q (2018) Robust lane-mark extraction for autonomous driving under complex real conditions. IEEE Access, 6:5749–5766, 9 Mar 2018
Xiong H, Yu D, Liu J, Huang H, Xu Q, Wang J, Li K (2020) Fast and robust approaches for lane detection using multi-camera fusion in complex scenes. IET Intell Trans Syst 14(12):1582–1593, 19 Nov 2020
Wang X, Yan D, Chen K, Deng Y, Long C, Zhang K, Yan S (2020) Lane extraction and quality evaluation: a hough transform based approach. In: 2020 IEEE conference on multimedia information processing and retrieval (MIPR), 03 Sept 2020
Li J, Shi X, Wang J, Yan M (2020) Adaptive road detection method combining lane line and obstacle boundary. IET Image Process 14(10):2216–2226, 15 Oct 2020
Stević S, Dragojević M, Krunić M, Četić N (2020) Vision-based extrapolation of road lane lines in controlled conditions. In: 2020 zooming innovation in consumer technologies conference (ZINC), 15 Aug 2020
Wang X, Qian Y, Wang C, Yang M (2020) Map-enhanced ego-lane detection in the missing feature scenarios. IEEE Access 8:107958–107968, 8 June 2020
Wang H, Wang Y, Zhao X, Wang G, Huang H, Zhang J (2019) Lane detection of curving road for structural high-way with straight-curve model on vision. IEEE Trans Veh Technol 68(6):5321–5330, 26 Apr 2019
Vatavu A, Danescu R, Nedevschi S (2015) Stereovision-based multiple object tracking in traffic scenarios using free-form obstacle delimiters and particle filters. IEEE Trans Intell Trans Syst 16(1):498–511
Lim KH, Seng KP, Ang LM et al (2019) Lane detection and Kalman-based linear parabolic lane tracking. In: International conference on intelligent human-machine systems and cybernetics, pp 351–354
Kang DJ, Choi JW, Kweon IS (2018) Finding and tracking road lanes using line-snakes. In: Proceedings of the conference intelligent vehicles, pp 189–194
Wang Y, Teoh EK, Shen D (2014) Lane detection and tracking using B-snake. Image Vis Comput 22(4):269–280
Cortes C, Vapnil V (2020) Support vector networks. Mach Learn 20(3):273–297
Zhang X, Huang H (2019) Vehicle classification based on feature selection with anisotropic magnetoresistive sensor. IEEE Sens J 19(21):9976–9982, 15 July 2019, 1 Nov 2019
Gopalan R, Hong T, Shneier M et al (2019) A learning approach toward detection and tracking of lane markings. IEEE Trans Int Transp Syst 13(3):1088–1098
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Rajakumar, R., Charan, M., Pandian, R., Jacob, T.P., Pravin, A., Indumathi, P. (2022). Lane Vehicle Detection and Tracking Algorithm Based on Sliding Window. In: Hemanth, D.J., Pelusi, D., Vuppalapati, C. (eds) Intelligent Data Communication Technologies and Internet of Things. Lecture Notes on Data Engineering and Communications Technologies, vol 101. Springer, Singapore. https://doi.org/10.1007/978-981-16-7610-9_66
Download citation
DOI: https://doi.org/10.1007/978-981-16-7610-9_66
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-7609-3
Online ISBN: 978-981-16-7610-9
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)