
Abstract
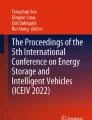
In order to take into account the tracking control effect and real-time performance of vehicle adaptive cruise control (ACC), a multi-objective control method based on explicit model predictive control (EMPC) is proposed; First, the model of adaptive cruise control is established. According to the predictive control theory, the multi-objective function and constraints of vehicle’s safety, tracking, economy and comfort are determined. Based on the multi parameter programming theory, the closed-loop model predictive control system based on repeated online optimization calculation is transformed into an equivalent explicit polyhedral piecewise affine (PWA) system. The optimal control law between the desired acceleration and the state variables is obtained by off-line calculation. Then the adaptive cruise control is realized by locating the current state zone and applying the explicit control law of the zone. The longitudinal tracking simulation results show that the designed control strategy has good tracking effect.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Mayne, D.Q.: Model predictive control: recent developments and future promise. Automatica 50(12), 2967–2986 (2014)
Li, S., Li, K., Rajamani, R., et al.: Model predictive multi-objective vehicular adaptive cruise control. IEEE Trans. Control Syst. Technol. 19(3), 556–566 (2011)
Ding, Y., Chen, H., Gong, J., et al.: Model predictive enhanced adaptive cruise control for multiple driving situations, pp. 1717–1722 (2018)
Moser, D., Schmied, R., Waschl, H., et al.: Flexible spacing adaptive cruise control using stochastic model predictive control. IEEE Trans. Control Syst. Technol. 26, 114–127 (2017)
Zhang, J.H., Li, Q., Chen, D.P.: Drivers imitated multi-objective adaptive cruise control algorithm. Control Theory Appl. 35, 769 (2018)
Wu, L., Liu, Z.A.: A study on headway distance control strategy for vehicle adaptive cruise control. Autom. Eng. (2005)
Kvasnica, Michal, Grieder, Pascal, Baotić, Mato, Morari, Manfred: Multi-parametric toolbox (MPT). In: Alur, Rajeev, Pappas, George J.. (eds.) HSCC 2004. LNCS, vol. 2993, pp. 448–462. Springer, Heidelberg (2004). https://doi.org/10.1007/978-3-540-24743-2_30
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Ruan, S., Ma, Y., Yan, Q. (2022). Adaptive Cruise Control for Intelligent Electric Vehicles Based on Explicit Model Predictive Control. In: Jia, Y., Zhang, W., Fu, Y., Yu, Z., Zheng, S. (eds) Proceedings of 2021 Chinese Intelligent Systems Conference. Lecture Notes in Electrical Engineering, vol 804. Springer, Singapore. https://doi.org/10.1007/978-981-16-6324-6_87
Download citation
DOI: https://doi.org/10.1007/978-981-16-6324-6_87
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-6323-9
Online ISBN: 978-981-16-6324-6
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)