
Abstract
The output performance of an electromagnetic inductive energy harvester under Gaussian white noise excitations is investigated in this paper. Equivalent linearization method is applied to derive the statistical moment of the system with symmetric quartic potential functions, including the mean square value of displacement and output current. According to the theoretical results, the influence of noise intensity and internal system parameters on the response of the generators subject to Gaussian white noise excitations is emphasized. In order to consider the asymmetric and higher-order potentials, the Fokker-Plank-Kolmogorov (FPK) equation is solved based on the theory of detailed balance, and it is indicated that the mean square value of output current is independent of the shape of potential energy function.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In recent decades, the significant advances in micro electro-mechanical system (MEMS) have promoted the widespread application of wireless sensors, embedded micro-electromechanical systems and portable electronic equipment [1]. However, one major challenge encountered is the supply of power to these systems. The technique of extracting energy from environment to produce continuous electrical power has been viewed as a promising approach for the reason that it cannot only extend the charge interval of the traditional batteries but also act as the power source directly [2]. Among various approaches applied to harvest energy from surroundings, the piezoelectric [3] and electromagnetic [4] based energy harvesting systems have become the hotspots of current research.
Due to the narrow frequency band issues of traditional linear resonance systems, a great deal of researchers focused on designing different nonlinear systems to broaden the response frequency range of energy harvesters. For the piezoelectric energy harvesting systems, various structures with different types of potential energy function have been proposed and investigated to improve the energy harvesting performance, which includes the monostable [5], bistable [6] and tristable [7] configurations. Considering the smaller internal impedance and larger current output, electromagnetic based configurations are more preferable in some special applications. Initially, Rome et al. [8] developed a suspended-load backpack to convert mechanical energy to electricity during normal walking. Saha et al. [9] presented a magnetic spring electromagnetic generator and tested it by shaker and human body motion. Mann et al. [10] investigated the design and analysis of a novel energy harvesting device that used magnetic levitation. More recently, Wang et al. [4] investigated the best way of the moving magnetic stack in a tunable electromagnetic energy harvester and demonstrated the performance of the harvester under human motion excitations. To further increase the energy harvesting performance in a broader frequency range, Mann and Owens [11] described an electromagnetic harvester with a bistable potential well, their theoretical and experimental results demonstrated that the potential well escape phenomenon can be used to improve the performance. Besides, electromagnetic harvesters with various structures [12, 13] have been proposed and optimized by many other researchers.
In the publications shown above, the investigations of the nonlinear piezoelectric and electromagnetic harvesters are almost under ideal harmonic excitations or human body excitations with low frequencies and large amplitudes. However, ambient vibrations always show the characteristics of broadband frequency distribution and randomness. It is of significant importance to investigate the response characteristics of the system under random excitations. Jiang et al. [14] and Ali et al. [15] proposed to determine approximately the output of the nonlinear piezoelectric harvester by the method of equivalent linearization. Daqaq [16] theoretically studied an inductive generator with a bistable symmetric potential to White noise with Fokker-Plank-Kolmogorov (FPK) equation and indicated that potential shape has no influence on the response. Yang et al. [17] applied the FPK equation to theoretically investigate the response performance of a bistable harvester utilizing lever mechanism under white and exponentially correlated Gaussian noises. Considering the characteristics of the nonlinear systems and the type of random excitations, many other techniques including the statistical linearization, moment differential equation and stochastic averaging have been proposed to characterize the response of the nonlinear systems. However, there has been no research applying the equivalent linearization technique to the analysis of electromagnetic inductive energy harvester driven by Gaussian white noise excitations.
In this paper, the statistical response characteristics of a monostable electromagnetic inductive energy harvester under Gaussian white noise excitations are considered. Equivalent linearization method is applied to theoretically derive the second-order statistical moment of the system and then the results are compared with numerical simulations. The remainder of the paper is organized as follows: Sect. 2 illustrates the dynamic model of the electromagnetic inductive harvester; equivalent linearization analysis is carried out in Sect. 3, and Sect. 4 compares the theoretical and numerical results to investigate the effect of parameters on system response. The influence of potential energy function shape on the output of the system is discussed in Sect. 5, and conclusion is emphasized in the final section.
2 Dynamic Model
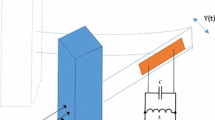
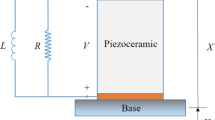
Figure 1 shows the schematic diagram of the electromagnetic energy harvester we proposed before [4]. It is composed of a hollow tube and two magnets fixed on both ends. A center magnetic stack is inside the tube, and it could move along the axial direction of the tube thus generating an induced current in the coil wrapping around the outside of the tube.

Schematic diagram of electromagnetic energy harvester
The electromechanical dynamic model of the electromagnetic inductive energy harvester can be expressed as follows [4]:
where m, \(c_{m}\) and \(\alpha\) are respectively the mass of the magnetic stack, mechanical damping coefficient and electromechanical coupling coefficient. \(\overline{z}\) and \(\overline{i}\) are respectively the relative displacement of the magnetic stack and current in the coil. \(k_{1}\) and \(k_{2}\) are the linear and cubic coefficients of the nonlinear restoring force. R is the total load resistance summing the internal impedance and the external load together. \(\overline{F}\) is the external excitation and the overdot represents a differential with respect to time \(\overline{t}\).
To nondimensionalize the dynamic mode, the following equations are introduced as,
where \(\omega_{n} = \sqrt {{{k_{1} } \mathord{\left/ {\vphantom {{k_{1} } m}} \right. \kern-\nulldelimiterspace} m}}\) is the natural frequency, and \(l_{c}\) and im are respectively the reference displacement and reference current. Then the nondimensionalized model under Gaussian white noise can be rewritten as
where
Submitting Eq. (5) into Eq. (4) and denoting \(\rho = 2\xi_{m} + {{\kappa^{2} } \mathord{\left/ {\vphantom {{\kappa^{2} } \vartheta }} \right. \kern-\nulldelimiterspace} \vartheta }\), the following equation is obtained
where \(n\left( t \right) = \sqrt {2\pi {\rm K}} \varsigma (t)\) is the Gaussian white noise with zero-mean and spectral density K, and \(D\;{ = }\;\pi {\rm K}\) can be defined as the noise intensity.
3 Equivalent Linearization Analysis
Equivalent linearization technique is a commonly used method to solve the nonlinear systems. By defining \(g\left( {z,\dot{z}} \right) = \rho \dot{z} + z + \delta z^{3}\), Eq. (7) can be expressed as
Now, we replace nonlinear system by an equivalent linear system characterized as
where \(\alpha_{e}\) is the equivalent damping coefficient and \(k_{e}\) is the equivalent linear coefficient. Then the difference between Eq. (8) and (9) is
According to the rule of the minimum mean square error shown as follows:
The equivalent damping coefficient \(\alpha_{e}\) and linear coefficient \(k_{e}\) are obtained as
When the excitation is Gaussian white noise, stationary response \(\dot{z}\) and z are uncorrelated, thus obtaining \({\it E}\left[ {z\dot{z}} \right] = 0\) and
From the equivalent linear system shown in Eq. (9), the stationary probability density function can be solved, based on which the statistical moment of the equivalent linear system are as follows,
For the reason that the distribution characteristics of \(\dot{z}\) and z is Gaussian, \({\it E}\left[ {z^{4} } \right] = 3\left( {{\it E}\left[ {z^{2} } \right]} \right)^{2}\) is satisfied and then
Then we obtain
and
According to Eq. (18), the equivalent linear coefficient \(k_{e}\) is solved as
Finally, the mean square value of \(\dot{z}\) and z of the system are
According to Eq. (5), the relationship between the mean square current i and velocity \(\dot{z}\) can be achieved.
4 Theoretical and Numerical Analysis
In this section, theoretical calculations and numerical simulations are carried out to investigate the influence of related parameters on equivalent damping coefficient \(\alpha_{e}\), equivalent linear coefficient \(k_{e}\), and the mean square value of displacement and current. Fourth-order Runge-Kutta algorithm is applied to numerically achieve the solutions of the model and the statistical moments presented below are obtained by averaging 5 independent simulations. The sampling frequency used in simulation is 5 Hz and the length of data is 15000. The parameters in Eq. (7) are \(\xi_{{\text{m}}} \;{ = }\;0.1\), \(\delta = 1\), \(\kappa^{2} = 0.07\), \(\vartheta \;{ = }\;2\) and D = \(\pi {\rm K}\) = 0.06 unless otherwise specified.
Figure 2(a) shows the influence of noise intensity D on equivalent linear coefficient \(k_{e}\). It can be viewed that the equivalent linear coefficient \(k_{e}\) increases with an increase in noise intensity D. With regarding to the influence on the mean square value of displacement and current, it is demonstrated in Fig. 3(a) and (b) that the mean square displacement increases nonlinearly while the mean square current increases linearly with the increase of noise intensity D. When it comes to the cubic coefficient \(\delta\), Fig. 2(b) indicates that its increase leads to the increase in linear coefficient \(k_{e}\). Although an increase in cubic coefficient \(\delta\) has a negative influence on the mean square displacement as illustrated in Fig. 3(c), it has no influence on the mean square value of current (Fig. 3(d)). Particularly, the theoretical calculations from the equations are well consistent with the numerical simulations.

Influence of (a) noise intensity D and (b) cubic cofficient \(\delta\) on the value of equivalent linear coefficient \(k_{e}\).

Influence of parameters on the mean square value of displacement and current: (a) and (b), noise intensity D; (c) and (d), cubic coefficient \(\delta\).
Figure 4(a)–(d) demonstrate the effect of mechanical damping ratio \(\xi_{m}\) and electromechanical coupling coefficient \(\kappa^{2}\) on the value of the equivalent damping coefficient \(\alpha_{e}\) and equivalent linear coefficient \(k_{e}\). It is observed from the figures that these two system parameters have the same effect on the equivalent damping coefficient \(\alpha_{e}\) and equivalent linear coefficient \(k_{e}\). In a word, the increase in mechanical damping ratio \(\xi_{m}\) and electromechanical coupling coefficient \(\kappa^{2}\) leads to an increase in the equivalent damping coefficient \(\alpha_{e}\) while a decrease in the equivalent linear coefficient \(k_{e}\). For the mean square values of displacement and current, Fig. 5(a)–(d) illustrate that they all have a decreasing trend with the enlarge of mechanical damping ratio \(\xi_{m}\) and electromechanical coupling coefficient \(\kappa^{2}\).

Influence of mechanical damping ratio \(\xi_{m}\) ((a) and (b)) and electromechanical coupling coefficient \(\kappa^{2}\)((c) and (d)) on equivalent damping coefficient \(\alpha_{e}\) and equivalent linear coefficient \(k_{e}\).

Influence of related parameters on the mean square value of displacement and current: (a) and (b), \(\xi_{{\text{m}}}\); (c) and (d), \(\kappa^{2}\).
In Fig. 6(a), the variation of equivalent damping coefficient \(\alpha_{e}\) with \(\vartheta\) is indicated, from which one can conclude that equivalent damping coefficient \(\alpha_{e}\) first decrease quickly and then slowly with an increase in the value of \(\vartheta\). While for equivalent linear coefficient \(k_{e}\), it first decreases quickly and then slowly with the enlarge of \(\vartheta\) as shown in Fig. 6(b). From Fig. 7(a), we can observe that the increase in the value \(\vartheta\) increases the mean square displacement. For the mean square current, it decreases quickly with the value of \(\vartheta\) and then the variation trend is slow.

Influence of \(\vartheta\) on the value of (a) equivalent damping coefficient \(\alpha_{e}\) and (b) equivalent linear coefficient \(k_{e}\).

Influence of \(\vartheta\) on the mean square value of (a) displacement and (b) current
Figure 8(a)–(d) compared the displacement response differences between the original nonlinear system and the equivalent linear system under different noise intensities D of 0.002, 0.035, 0.700 and 0.100. When the noise intensity D is very low, the response of the equivalent linear system fits very well with the original nonlinear system and the error is very small. With an increase in noise intensity D, although the response of the linear system is still in good agreement with the original nonlinear system, the error becomes large.
5 Discussion About the Shape of Potential Energy Function
In the investigations shown above, the nonlinear restoring force considered in the electromechanical model is symmetric and with quartic potential energy functions. In experiments and practical applications, it is difficult to obtain a perfectly symmetric potential function due to the imperfection in materials and manufacturing. Furthermore, a higher order potential function may also be achieved in some special conditions. Therefore in this part, the influence of the shape of potential energy functions on output performance of the inductive harvester is studied. Considering the symmetric quartic potential energy function shown in Fig. 9 with Case-1 and an induced asymmetric potential in Case-2 by introducing a quadratic nonlinear coefficient to the nonlinear restoring force, the asymmetric system has softer restoring force compared with the symmetric one. Additionally, another symmetric potential function in Case-3 is considered. By comparing the asymmetric system to the symmetric one in Case-3, it has more harden nonlinear restoring force. Under Gaussian white noise with different noise intensities, it is concluded from Fig. 9 that the shapes of potential energy functions have no influence on the mean square value of the current.
To explain this phenomenon theoretically, asymmetric potential energy functions or the one with high-order potentials are consider. Generally, the nonlinear restoring force in Eq. (7) can be expressed as \(u\left( z \right)\). Then the corresponding Ito differential equations of the system can be written as follows by introducing \(Z_{1} = z\) and \(Z_{2} = \dot{z}\).
where B is a Brownian motion process. The corresponding FPK equation is expressed as
where P is the stationary probability density function with the boundary conditions \(P\left( { - \infty ,t} \right) = P\left( {\infty ,t} \right) = 0\). A stationary solution of Eq. (24) can be obtained by setting \({{\partial P} \mathord{\left/ {\vphantom {{\partial P} {\partial t}}} \right. \kern-\nulldelimiterspace} {\partial t}}\;{ = }\;0\). The solution of Eq. (24) is supposed as
According to the detailed balance principle, the first and second order derivative moments of Eq. (22)–(23) are
in which the reversible and irreversible part of the first order derivative moment are
Then the following equations characterizing \(\phi \left( {\varvec{Z}} \right)\) are obtained based on detailed balance principle
The solutions of Eq. (28)–(29) are respectively as follows.
Thus, the stationary probability density function is achieved as
where \(\frac{1}{{C_{1} }}\;{ = }\;\int_{ - \infty }^{\infty } {\left\{ {\exp \left[ { - \frac{\rho }{\pi K}\int_{0}^{{Z_{1} }} {u\left( y \right)dy} } \right]} \right\}} dZ_{1}\), \(\frac{1}{{C_{2} }}\;{ = }\;\int_{ - \infty }^{\infty } {\left[ {\exp \left( { - \frac{\rho }{\pi K} \cdot \frac{1}{2}Z_{2}^{2} } \right)} \right]} dZ_{2}\). The mean square value of the velocity of the system is derived as
From Eq. (33), it can be concluded that the mean square current deciding the output performance only relates to the noise intensity \(\pi K\) and \(\rho\), and is independent of the potential energy function shape.

Output displacement comparison between original nonlinear system and equivalent linear system: (a) D = 0.002; (b) D = 0.035; (c) D = 0.070; (d) D = 0.100.

Potential energy functions of three cases and corresponding mean square current under different excitation intensities D.
6 Conclusion
In this paper, the response characteristics of an electromagnetic inductive energy harvester subjected to Gaussian white noise is theoretically and numerically investigated. The mean square values of dimensionless displacement, velocity, and current of a system with symmetric quartic potential functions are deduced based on the method of equivalent linearization, along with the equivalent damping coefficient and equivalent linear coefficient. Numerical and theoretical investigations demonstrate that the increase in noise intensity has a positive effect on the mean square current of the system, while the variation of cubic nonlinear coefficient has no effect on the mean square current. While for other system parameters, the increase of them all have a negative influence on the output current. Considering that the system may have asymmetric or higher-order potential energy functions, the Fokker-Plank-Kolmogorov (FPK) equation with general nonlinear restoring force is solved and the mean square current is obtained which is the same as that from equivalent linearization technique. In other words, the output performance of the inductive energy harvester is independent of the shape of potential energy function.
References
Mitcheson PD, Yeatman EM, Rao GK, Holmes AS, Green TC (2008) Energy harvesting from human and machine motion for wireless electronic devices. Proc IEEE 96(9):1457–1486
Daqaq M F, Masana R, Erturk A, Dane Quinn D (2014) On the role of nonlinearities in vibratory energy harvesting: a critical review and discussion Appl Mech Rev 66(4):040801
Xu J, Tang J (2015) Multi-directional energy harvesting by piezoelectric cantilever-pendulum with internal resonance Appl Phys Lett 107(21) 213902
Wang W, Cao J, Zhang N, Lin J, Liao W-H (2017) Magnetic-spring based energy harvesting from human motions: design, modeling and experiments Energy Convers Manage 132:189–197
Stanton S C, McGehee C C, Mann B P (2009) Reversible hysteresis for broadband magnetopiezoelastic energy harvesting Appl Phys Lett 95(17):174103
Kumar A, Sharma A, Vaish R, Kumar R, Jain SC (2018) A numerical study on flexoelectric bistable energy harvester. Appl Phys A 124(7):1–9. https://doi.org/10.1007/s00339-018-1889-6
Kim P, Son D, Seok J (2016) Triple-well potential with a uniform depth: advantageous aspects in designing a multi-stable energy harvester Appl Phys Lett 108(24):243902
Rome LC, Flynn L, Goldman EM, Yoo TD (2005) Generating electricity while walking with loads. Science 309(5741):1725–1728
Saha CR, O’Donnell T, Wang N, McCloskey P (2008) Electromagnetic generator for harvesting energy from human motion. Sens Actuators, A 147(1):248–253
Mann BP, Sims ND (2009) Energy harvesting from the nonlinear oscillations of magnetic levitation. J Sound Vib 319(1–2):515–530
Mann BP, Owens BA (2010) Investigations of a nonlinear energy harvester with a bistable potential well. J Sound Vib 329(9):1215–1226
Wu S, Luk PCK, Li C, Zhao X, Jiao Z (2017) Investigation of an electromagnetic wearable resonance kinetic energy harvester with ferrofluid. IEEE Trans Magn 53(9):1–6
Deng W, Wang Y (2016) Non-contact magnetically coupled rectilinear-rotary oscillations to exploit low-frequency broadband energy harvesting with frequency up-conversion. Appl Phys Lett 109(13):133903
Jiang W-A, Chen L-Q (2014) An equivalent linearization technique for nonlinear piezoelectric energy harvesters under Gaussian white noise. Commun Nonlinear Sci Numer Simul 19(8):2897–2904
Ali S F, Adhikari S, Friswell M I, Narayanan S (2011) The analysis of piezomagnetoelastic energy harvesters under broadband random excitations J Appl Phys 109(7):074904
Daqaq MF (2011) Transduction of a bistable inductive generator driven by white and exponentially correlated Gaussian noise. J Sound Vib 330(11):2554–2564
Yang K, Fei F, Du J (2019) Investigation of the lever mechanism for bistable nonlinear energy harvesting under Gaussian-type stochastic excitations J Phys D Appl Phys 52(5):055501s
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Wang, W., Cao, J., Wei, ZH. (2022). Equivalent Linearization Analysis of Electromagnetic Energy Harvesters Subjected to Gaussian White Noise. In: Jing, X., Ding, H., Wang, J. (eds) Advances in Applied Nonlinear Dynamics, Vibration and Control -2021. ICANDVC 2021. Lecture Notes in Electrical Engineering, vol 799. Springer, Singapore. https://doi.org/10.1007/978-981-16-5912-6_30
Download citation
DOI: https://doi.org/10.1007/978-981-16-5912-6_30
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-5911-9
Online ISBN: 978-981-16-5912-6
eBook Packages: EngineeringEngineering (R0)