
Abstract
Seven classical theories have been suggested for calculating wingbeat frequency in hovering state of flight. In Mass flow theory of Hovering, frequency is calculated based on the rate of mass flow of air; and insect is in dynamic equilibrium. This was suggested by Puranik et al. The value of K is variable in different theories. In Mechanical oscillatory theory, the oscillating wing is considered as a mechanical oscillator. Wing length is in millimetres and K is 3540. This theory was suggested by Greenwalt. Crawford’s theory is a modified Mass flow theory where wing swept area replaces wingspan square and stroke angle is small. This is applicable for small insects. Norberg’s theory is based mainly on the mass of the flier (and other flight parameters) which is related to power of the flier. Pennycuick’s theory is based on multiple regression and dimensional analysis. Theory based on Newton’s Law is on mass flow concept. Deakin’s theory, he applied dimensional analysis concept. This is particularly applicable to insect hovering.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
Introduction
The hovering flight requires normally more power than does the forward flight. However, the discrepancy may become less significant for the insects which weigh far less as compared to birds and bats. Understanding a detailed study of flying insects that seem to hover effortlessly helps in the development of flapping flexible wings for winged nano-scaled MAVs useful for surveillance over small areas. Forward speed being zero in hovering flight, the lift has to be sufficient to balance the total weight of the flier. The buoyant nature of the air also would help in keeping afloat the tiny insects in the hovering state. Birds like certain hawks, kingfishers and hummingbirds also hover for survey and feeding. Hummingbirds are the masters of hovering flight in nature. Among the insects, the hovering flight is found in honey bees, bumblebees, moths, butterflies, some plant bugs and moths during sucking of juice from the plant or nectar from the flowers. In normal hovering, the wing moves in a horizontal plane. Seven classical theories have been mentioned below to predict the hovering capabilities of the various fliers in terms of frequency (Table 6.1).
Out of these seven theories, we are discussing Mass Flow Theory and its related formulae in greater detail because it forms the basis for the interpretation of other theories. Murthy [8] in his Ph.D. Thesis has discussed hovering parameters and hovering of Carpenter Bee.
Mass Flow Theory of Hovering
Puranik and Ahmed [7] suggested a theory for wingbeat frequency of a flier on the basis of mass flow of air displaced by wings.
During the hovering state, the reaction force of a flier is proportional to its weight. According to mass flow theory, during the hovering state, the insect is in dynamic equilibrium and the reacting force is proportional to the rate of mass flow of air where
where,
where,
- \(R\):
-
is reacting force of the flier.
- \(\frac{dm}{{dt}}\):
-
is the rate of mass flow of air passing over the wings.
- \(M_{f}\):
-
is the mass of the flier and
- g:
-
is the acceleration due to gravity.
The rate of mass flow of air during flight is considered as a function of disc area (Sd), effective wing breadth (Beff), the density of air ρ and wingbeat frequency of flier (ϑh).
The wingbeat cycle consists of an upstroke followed by a downstroke. In a flapping cycle, as the downstroke of the wing is considered to be more powerful and contributes to maximum lift than upstroke (recovery stroke), half of the value of wingbeat frequency \(\left(\frac{{\vartheta }_{h}}{2}\right)\) is included in the above equation as it is derived on an empirical basis. The frequency arrived at the above equation agrees well with experimental observations.
or
where
and L = wingspan
Rewriting this equation, we get
By rearranging the above equation carefully and substituting K’ as below,
Hence,
or
The value of \(K^{^{\prime}}\) is obtained from the slope of the log graph drawn between \(M_{f}\) and \(\vartheta_{h} L^{2} B_{eff}\) assuming the density of air corresponds to standard sea levels conditions taken in CGS units. The value of \(K^{^{\prime}}\), thus, obtained is 2086. The above equation of wingbeat frequency is re-interpreted by [9] and [10] in their theses and by Chari et al. (2014).
The wingspan loading can also be interpreted as the ratio of wingloading to the aspect ratio of the wing.
where WL is wingloading ratio and AR is aspect ratio values, respectively.
On re-substituting for WSL value in Eq. 6.9, we get
or
Mechanical Oscillator Theory
Greenewalt [1] considered the oscillating wing of a biological flier as a driven mechanical harmonic oscillator and suggested the following equation as
with a value of 3540 for the constant K and l is being the wing length in mm.
Accordingly,
The value of n has to be varied between 1 and 1.25 for tallying with the natural frequency of the flier by the trial-and-error method. The value of the wing length (l) has to be expressed in millimetres. Greenewalt confined his experiments to small hummingbirds. This is a very cumbersome method that involves many trial-and-error calculations by changing the power values of the index of l. Therefore, when we apply this formula for the calculation of frequency in biological fliers, it is a long drawn process. Hence, this theory is not generally used for calculating the insect wingbeat frequency.
Crawford’s Theory
Crawford [2] proposed modified mass flow theory and obtained a relationship for the wingbeat frequency of small fliers and the equation is as follows:
where
- \(M_{f}\):
-
Mass of the flier.
- \(S_{w}\):
-
Wing swept area = Stroke angle (radians) × (wing length, mm)2.
- \(\rho\):
-
Density of air 0.001225 gm/ cm3 (for standard air at mean sea level).
- \(g\):
-
Acceleration due to gravity = 981 cm/ s2.
This theory is applicable where the wing swept area and mass of the insect are relatively small as in the case of a mosquito and other very small insects with a high wingbeat frequency. The value of K as calculated is 252.44.
Norberg’s Theory
Norberg [3] suggested the formula for the calculation of wingbeat frequency based on the mass of the flier (M).
This formula is applicable to fliers having medium speed and size. However, it is not applicable to hummingbirds which are of specialized category; he proposed a different formula as given below
Norberg has considered the mass of the flier alone as a criterion for the calculation of wingbeat frequency and assumed that other parameters (flight) are related to it.
Pennycuick’s Theory
Pennycuick [5, 6] considered the following parameters to be influencing the wingbeat frequency and suggested the final equation as follows:
As Pennycuick studied marine birds alone, therefore, the value of K is obtained to be 253 as suggested by him. The density of air is 1.225 × 10–3 gm/cm3. The universal application of this formula to insects remains to be established by further studies.
Theory Based on Newton’s Laws
The hovering frequency formula suggested based on Newton’s theory is as follows:
The hovering frequency \({\vartheta }_{h}\) can be expressed as
where
Hence, the value of K is 263.4.
Newton’s formula is basically based on the mass flow concept. However, larger samples of fliers have to be tested by using for generalization of this formula.
Deakin’s Theory
Deakin [12] has suggested the following formula for the calculation of wingbeat frequency of insects.
where s is the combined area of the two wings. This theory is applicable to a large number of insects. Hence, this can be universal in its application to insect frequency calculations.
The above seven theories and their formulae have been briefly mentioned from Bio-Aerodynamics of Avian Flight [11].
Earlier Work on Hovering
Ellington [13] studied the kinematic changes with the flight speed of bumblebee. Other insects like fruitfly and hawk moth were also studied. He derived the mass ‘m’ that can be supported during hovering as
where
- \(\varphi\):
-
is wingbeat amplitude (peak to peak in radians).
- \(AR\):
-
is the aspect ratio of the wing.
- \(m\):
-
is mass of insect (kg).
- \(n\):
-
is strokes/seconds of wingbeat, (Hz).
- \(R\):
-
is wing length (m).
Summary
Symmetrical hovering is found in hummingbirds and insects. This can be summarized as follows:
-
1.
Body mass is usually small and the position of the orientation of the body may be more or less vertical during hovering.
-
2.
Wings move forward and backward coupled with some kind of small rotation at the base.
-
3.
Differential lift is produced during downstroke and upstroke; however, the lift produced during downstroke is about an average value of 65%.
-
4.
Wings are rotated about the wing base during pronation and supination.
-
5.
Hovering is mainly sustained by the wingbeat frequency of the flier.
-
6.
The wing tip traces approximately a figure of ‘8’.
-
7.
The wing is relatively rigid and cambered and the wingspan does not change during hovering.
-
8.
The hovering frequency is relatively high and the variation has a frequency range depending on whether it is a neurogenic or myogenic flier.
-
9.
Hovering is a costly mode of flight in terms of energy consumption.
-
10.
All the seven theories of hovering flight relevant to the insects have been discussed in detail.
-
11.
In hovering, most of the lift is produced during the downstroke and so also the drag.
The wingbeat frequencies of different insects as calculated from above-mentioned theories, particularly from mass flow theory, have been shown in Table 3.1. The experimental and theoretical values as calculated are in good agreement.
In conclusion, for the wing design of an Insect Mimicking MAV, the structure of a hovering insect flier appears to be a more ideal choice. Since it is made up of chitin and has elastomere resilin at the main base. The chitinous thin wing membrane of insects is traversed by a large number of longitudinal veins which contributes to the elastic property of the wing. Aeroelasticity plays an important role in the design and kinematic study of the wing motion since it involves axial stretching, buckling and damped vibrations.
Non-uniform flexibility and structural deformation of the wing in hovering are an important factor which need further study.
Addendum
Salient features of comparison of symmetrical and hovering insects and birds.
-
Seen in hummingbirds and insects.
-
Size/body mass (5–40 gr) is small and Hovering may be vertical.
-
Wings move forward and backward and rotate at the base.
-
Differential lift is produced during downstroke and upstroke.
-
Wings are rotated at the fulcrum, during pronation and supination.
-
Hovering is due to wingbeat frequency.
-
Figure of ‘8’ is formed in the vertical plane by the flapping flexible wing at the tip.
-
The wing is rigid and cambered and has no flexion except at the tip.
-
Example: Cicada and Hummingbird.
-
Lift produced in insects during downstroke is 50% and upstroke is about 40%. In
-
hummingbirds downstroke is 70% and in upstroke is 30%.
-
The hovering frequency is high and ranges between 10 and 80 cps.
Principles involved in hovering flight are as follows
-
1.
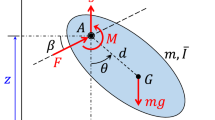
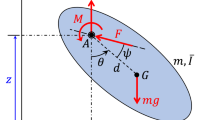
During hovering, the weight of the hovering insect is acting downward, and it is balanced by a lift force given by the rate of change of momentum of air acting in an upward direction due to wingbeat cycle. The mass of the insect is usually small as compared to a bird or bat. The hovering equilibrium can be expressed as follows:
R = W
W = Mf
R = Mf
Rα = dm/dt
R stands for reaction force.
W indicates the weight of the hovering insect. Mf is the mass of the flier.
dm/dt is the rate of the small mass of a quantity of air.
-
2.
In the hovering state, the forward velocity is almost zero and hence W = L. The drag and thrust forces which are developed by the flapping flexible wings almost become equal to each other, contributing to equilibrium conditions in the hovering state.
-
3.
Most of the aerodynamic work is done during the downstroke of the wingbeat cycle and the upstroke of the wing is assumed as more or less a recovery stroke which needs relatively less power. However, the wingbeat cycle, in general, depends on anatomy, physiology, elastic nature of the fulcrum (resilin), the structure of the flapping flexible wing and muscle type.
-
4.
Biological flier which has higher body mass cannot hover for a longer time, since high power is not available to the muscle.
-
5.
Hovering is a continuous power-on beating of the wings.
-
6.
The flow of air through stroke plane in hovering state is mainly due to induced downward velocity.
-
7.
The hovering state of the flier is calculated on the assumption of steady state of the air. Hovering in an unsteady state of air cannot be ruled out in nature. True hovering is different from wind-assisted hovering.
-
8.
The wing tip during hovering flight traces a figure of ‘8’. The shape of figure of ‘8’ is variable in different groups of insects. The figure of ‘8’ can be explained by wing Lissajou’s pattern.
-
9.
In the case of Cicada (or hummingbird) while hovering, the flapping pattern is coupled with the wing pitch adjustment, leading to the formation of figure of 8.
-
10.
High-frequency flapping wing sheds the vortex at the tip of the wings. These wing tip vortices accumulate one on the above as a cushion and press against the next flapping stroke during hovering.
-
11.
Cicada is an ideal reference for hovering flight in insects because of its large weight to wing size ratio. Cicada is a fast flier.
-
12.
Wingspan remains more or less constant during hovering.
-
13.
Usually, the hovering frequency is high, and the variation in frequency range depends upon whether the insect is a neurogenic or myogenic flier.
-
14.
The neurogenic nature of flier is not influenced by wing tip mutilations. However, in myogenic flier after wing tip mutilations, the frequency increases considerably.
-
15.
Basically, the soapnut bug is a myogenic flier that has become neurogenic because of adaptation to the sedentary way of life on soapnut trees during the prolonged course of evolution.
Differences between Symmetrical and Asymmetrical Hovering (modified after Chari 2014).
S.No | Symmetrical Hovering | Asymmetrical Hovering |
|---|---|---|
1 | Common in Hummingbirds and some insects | Seen in Kestrels and Kingfishes |
2 | Body mass 2–30gm, flight position is vertical | Body mass is relatively high, flight position is horizontal |
3 | Wings move forward and backward and rotate at the base | Wings move up and down and do not rotate at the base |
4 | Differential lift is produced during each stroke | Most lift is produced during downstroke and upstroke is recovery stroke |
5 | Wings rotate at the fulcrum during pronation and supination | Wings do not rotate at the fulcrum |
6 | Hovering is due to wingbeat frequency and forward velocity is zero | Hovering is assisted by incoming wind also |
7 | Figure of ‘8’ is vertical in plane | Figure of ‘8’ is horizontal in plane |
8 | The wing is relatively rigid and chambered at the wing tip | During the upstroke, the wing, flexes and primary feather open up |
9 | In hovering insects, the lift produced may be 50% or more. In hummingbirds, the downstroke produces 70% lift | The lift produced during downstroke may be about 90% and the upstroke is a recovery stroke |
10 | Hovering frequency ranges from 10–80cps | The hovering frequency is low and is about 10–15cps |

Hovering insects. a Carpenter Bee. b Honey Bee
References
Greenewalt, C. H. (1975). The flight of birds: the significant dimensions, their departure from the requirements for dimensional similarity, and the effect on flight aerodynamics of that departure. Transactions of the American Philosophical Society, 1–67.
Crawford, F. S. (1971). Comments on: The physics and physiology of insect flight. American Journal of Physics, 39, 584.
Norberg, U. M. (1990). Vertebrate flight: Mechanics, physiology, morphology. ecology, and evolution. Springer, 1.
Norberg, U. M. (2012). Vertebrate flight: Mechanics, physiology, morphology, ecology and evolution (Vol. 27). Springer Science & Business Media.
Pennycuick, C. J. (1996). Wing beat frequency of birds in steady cruising flight. New data and improved predictions. The Journal of Experimental Biology, 199(7), 1613–1618.
Pennycuick, C. (1996). Wing beat frequency of birds in steady cruising flight: New data and improved predictions. The Journal of Experimental Biology, 199(7), 1613–1618.
Puranik, P. G., & Ahmed, A. (1976). Fourier analysis of the flight-sound of the pentatomid bug tessaratoma javanica Thunberg & the pressure pattern of its wings. Indian Journal of Experimental Biology.
Murthy, G. K. (1994). Comparative flight of an insect, bird and bat. Ph.D. Thesis. Kakatiya University, Warangal, A.P., India
Ravi, A. (1986). Flight dynamics and flight muscle metabolism in Chrysocorispurpureus (WESTW), a pentatomid bug. Ph.D. Thesis, Kakatiya University, Warangal, India
Vydehi, Y. (1992). Flight parameters, moment of inertia and some observations on flight muscle metabolism of Tessaratoma Javanica (Thunborg) a Pentatomid Bug. Ph.D. Thesis, Kakatiya University, Warangal, India
Chari. (2014). Bio-aerodynamics of Avian Flight. NDRF, Bangalore, India.
Deakin, M. A B. (2010). Formulae for insect wingbeat frequency. Journal of Insect Science, 10, 96. insectscience.org/10 96
Ellington, C. P. (1999). The novel aerodynamics of insect flight: Applications to micro-air vehicles. Journal of Experimental Biology, 202(23), 3439–3448.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Chari, N., Mukkavilli, P., Sarwade, A.G., Sandhya, D. (2021). Theories on Hovering Flight of Insects. In: Chari, N., Mukkavilli, P., Parayitam, L. (eds) Biophysics of Insect Flight. Springer Series in Biophysics, vol 22. Springer, Singapore. https://doi.org/10.1007/978-981-16-5184-7_6
Download citation
DOI: https://doi.org/10.1007/978-981-16-5184-7_6
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-5183-0
Online ISBN: 978-981-16-5184-7
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)